ANALISA SISTEM TENAGA Hal-1
BAB II
STUDI ALIRAN DAYA
2.1. PENDAHULUANAliran beban (atau aliran daya) merupakan solusi untuk kondisi operasi keadaan normal dari suatu sistem tenaga listrik. Secara umum, perhitungan aliran daya dilakukan untuk perencanaan sistem tenaga dan perencanaan operasional dan untuk operasi dan kendali sistem. Data yang diperoleh dari studi aliran daya digunakan untuk studi operasi normal, analisis kontingensi, penjadwalan optimum dan stabilitas.
Pentingnya masalah aliran daya telah menarik perhatian para matematikawan dan insinyur dunia selama beberapa tahun. Banyak peneliti telah menghabiskan banyak waktu dari karir profesionalnya untuk mencari solusi dari masalah aliran daya. Sejumlah upaya yang telah dilakukan untuk solusi masalah aliran daya telah menghasilkan banyak hasil yang dilaporkan dalam sejumlah publikasi-publikasi teknik.
Sebelum tahun 1929, semua perhitungan aliran daya dilakukan dengan tangan. Pada tahun 1929, network calculators (dari Westinghouse) atau network analyzers (dari General Electric) digunakan untuk melakukan perhitungan aliran daya. Tulisan pertama yang menjelaskan metode digital untuk penyelesaian masalah aliran daya dipublikasikan pada tahun 1954. Namun demikian, metode digital pertama yang sukses dikembangkan adalah oleh Ward dan Hale pada tahun 1956. Metoda iteratif yang digunakan pada awalnya didasarkan pada matriks-Y dari metoda Gauss-Seidel. Metoda ini memerlukan simpanan komputer yang minimum dan iterasi yang sedikit untuk sistem yang kecil. Namun, bila ukuran sistem bertambah besar, jumlah iterasi yang diperlukan meningkat secara dramatis. Pada beberapa kasus, metoda ini sama sekali tidak memberikan solusi.
Kekurangan dari metoda Gauss-Seidel diatas memicu dikembangkannya metoda Newton-Raphson. Metoda ini awalnya dikembangkan oleh Van Ness dan Griffin dan kemudian dikembangkan lagi oleh peneliti-peneliti lain seperti Tinney dan Stot. Metoda ini didasarkan pada algoritma Newton-Raphson untuk penyelesaian persamaan kuadratik simultan dari jaringan daya. Berlawanan dengan algoritma Gauss-Seidel, metoda ini memerlukan waktu yang lebih panjang per-iterasinya, namun jumlah iterasinya sedikit dan tidak tergantung pada ukuran jaringan. Oleh karenanya, masalah aliran daya yang tidak dapat diselesaikan dengan metoda Gauss-Seidel (misalnya sistem dengan impedansi negatif) dapat diselesaikan secara mudah dengan metoda ini. Akan tetapi metoda ini tidak kompetitif secara komputasional untuk sistem yang besar karena meningkatnya waktu hitung dan simpanan komputer. Namun demikian, dengan dikembangkannya teknik eliminasi yang sangat efisien oleh Tinney dkk untuk menyelesaikan persamaan-persamaan simultan, telah meningkatkan efisiensi dari metoda Newton Raphson dalam hal kecepatan dan penyimpanan komputer. Hal tersebut telah membuat metoda ini menjadi metoda aliran daya yang paling luas digunakan.
(menyelesaikan secara terpisah) masalah P-θ dan Q-V. Sehingga, metoda ini merupakan aproksimasi terhadap metoda Newton-Raphson. Metoda ini memiliki akurasi yang cukup baik dan sangat cepat dan oleh karenanya dapat digunakan untuk aplikasi on-line dan penentuan kontingensi.
2.2. KONSEP DASAR
Masalah aliran daya dapat didefinisikan sebagai perhitungan dari aliran-aliran daya saluran dan tegangan-tegangan bus dari suatu sistem tenaga listrik pada kondisi beban dan pembangkitan tertentu.
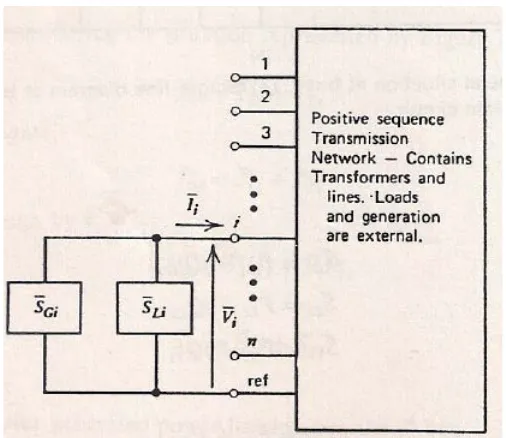
Gambar 2.1 memperlihatkan situasi pada salah satu bus (bus i) pada suatu sistem tenaga. Dengan menggunakan hukum Kirchhof untuk arus:
IGi =ILi+ITi (2.1)
Dengan mengambil konjuget dari (2.1), diperoleh:
IGi∗ =I∗Li+ITi∗ (2.2)
Kemudian mengalikannya dengan Vi:
ViIGi∗ =ViILi∗ +ViITi∗ (2.3) atau:
SGi =SLi+STi (2.4) dimana:
SGi = daya pembangkitan tiga-fasa yang mengalir ke bus i
SLi = daya beban tiga-fasa yang mengalir keluar dari bus i
STi = daya yang ditransmisikan tiga-fasa yang mengalir keluar dari bus i
Oleh karena:
SGi=PGi+ jQGi (2.5a) SLi=PLi+ jQLi (2.5b) STi =PTi+ jQTi (2.5c) maka:
PGi =PLi+PTi (2.6a) QGi=QLi+QTi (2.6b)
ANALISA SISTEM TENAGA Hal-3 Gambar 2.1. Situasi Pada Bus i. (a) Diagram Segaris. (b) Rangkaian Ekivalen.
Dengan demikian, (2.6a) dan (2.6b) mengindikasikan bahwa untuk setiap bus akan terdapat enam variabel (PGi, QGi, PLi, QLi, Vi dan δi) yang dihubungkan melalui kedua persamaan tersebut. Perhitungan aliran daya biasanya dilakukan pada kondisi beban tertentu (PLidan QLi diketahui). Oleh karenanya, untuk setiap bus sistem, akan tersisa empat variabel (yaitu PGi, QGi, Vi dan δi) yang harus ditentukan atau dicari. Untuk dapat menyelesaikan (2.6a) dan (2.6b), dua dari empat variabel tersebut harus ditentukan atau dispesifikasi. Variabel-variabel mana yang akan dispesifikasi biasanya didasarkan pada apakah kita mempunyai kendali terhadap variabel tersebut. Jadi variabel-variabel yang dispesifikasi biasanya adalah variabel-variabel yang dapat dikontrol secara fisik. Hal ini akan dibahas lebih lanjut di Subbab 2.4.
Misalkan suatu sistem tenaga n-bus yang diatur dengan cara seperti yang diperlihatkan pada Gambar 2.2. Perlu dicatat bahwa pada Gambar 2.2 tersebut generator-generator dan beban-beban diletakkan secara eksternal terhadap jaringan transmisi yang berada dalam kotak. Jaringan dalam kotak merupakan jaringan pasif dan dapat ditangani dengan teori jaringan n-terminal. Dengan menggunakan teori tersebut, dapat kita tuliskan:
I =YV (2.7)
dimana V adalah vektor tegangan berukuran (n×1) yang elemen-elemennya adalah tegangan-tegangan bus; I adalah vektor arus sumber berukuran (n×1) yang elemen-elemennya berupa arus injeksi pada setiap bus sistem (besarnya arus injeksi ini adalah
berukuran (n×n) yang mengandung semua informasi tentang jaringan sistem tenaga (trafo dan saluran transmisi).
Gambar 2.2. Sistem Tenaga n-Bus Untuk Analisis Aliran Daya.
2.3. PEMBENTUKAN MATRIKS ADMITANSI BUS
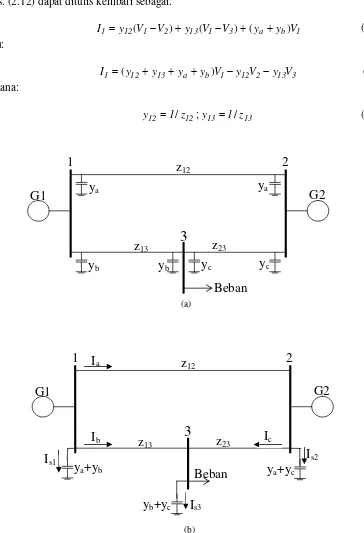
Pembentukan dari matriks admitansi bus akan dijelaskan melalui sistem 3-bus yang diagram segarisnya diperlihatkan pada Gambar 2.3. Perlu dicatat disini bahwa admitansi-admitansi shunt saluran juga ditunjukkan pada diagram segaris tersebut untuk memudahkan pemahaman tentang pembentukan matriks admitansi bus.
Misalkan arus-arus injeksi pada bus 1,2 dan 3 pada sistem tenaga pada Gambar 2.3 adalah
I1, I2 dan I3. Berikut adalah persamaan-persamaan untuk arus-arus injeksi tersebut yang didapat berdasarkan hukum Kirchhof.
Persamaan untuk arus injeksi I1:
Penerapan hukum Kirchhof pada bus 1 menghasilkan:
I1=Ia+Ib+Is1 (2.8) Oleh karena:
12 2 1 a
z V V
I = − (2.9)
13 3 1 b
z V V
I = − (2.10)
Is1=(ya+ yb)V1 (2.11)
ANALISA SISTEM TENAGA Hal-5
a b 1
13 3 1 12
2 1
1 y y V
z V V z
V V
I = − + − +( + ) (2.12)
Pers. (2.12) dapat ditulis kembali sebagai:
I1 = y12(V1−V2)+y13(V1−V3)+(ya +yb)V1 (2.13) atau:
I1 =(y12+ y13+ ya+ yb)V1− y12V2 −y13V3 (2.14) dimana:
y12 =1/z12 ;y13 =1/z13 (2.15)
Gambar 2.3. Sistem 2-Generator 3-Bus.
z
123
y
cy
cy
by
by
ay
az
23z
13Beban
G2
G1
2
1
(a)
I
s3y
b+y
cI
s2y
a+y
cI
s1I
bz
123
y
a+y
bI
az
23z
13Beban
G2
G1
2
1
(b)
Persamaan untuk arus injeksi I2:
Penerapan hukum Kirchhof pada bus 2 menghasilkan:
I2 =−Ia+Ic+Is2 (2.16) Oleh karena:
23 3 2 c
z V V
I = − (2.17)
Is2 =(ya +yc)V2 (2.18)
maka, dengan mensubstitusi (2.9), (2.17) dan (2.18) ke (2.16) diperoleh:
a c 2
23 3 2 12
1 2
2 y y V
z V V z
V V
I = − + − +( + ) (2.19)
yang dapat ditulis kembali sebagai:
I2 = y12(V2−V1)+y23(V2 −V3)+(ya+ yc)V2 (2.20) atau:
I2 =−y12V1+(y12+ y23+ ya +yc)V2−y23V3 (2.21) dimana:
y23=1/z23 (2.22)
Persamaan untuk arus injeksi I3:
Penerapan hukum Kirchhof pada bus 3 menghasilkan:
I3 =−Ib−Ic+Is3 (2.23)
Oleh karena:
Is3=(yb +yc)V3 (2.24)
maka, dengan mensubstitusi (2.10), (2.17) dan (2.24) ke (2.23):
b c 3
23 2 3 13
1 3
3 y y V
z V V z
V V
I = − + − +( + ) (2.25)
Pers. (2.25) dapat ditulis kembali sebagai:
I3= y13(V3−V1)+y23(V3 −V2)+(yb +yc)V3 (2.26) atau:
ANALISA SISTEM TENAGA Hal-7 Persamaan-persamaan (2.14), (2.21) dan (2.27) dapat ditulis dalam bentuk vektor/matriks seperti berikut:
I =YV (2.28)
dimana:
⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢
⎣ ⎡ = ⎥
⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢
⎣ ⎡ =
3 2 1
3 2 1
V V V
I I I
V
I ; (2.29)
dan:
⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢
⎣ ⎡ = ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢
⎣ ⎡
+ + + −
−
− +
+ −
− −
+ + + =
33 32 31
23 22 21
13 12 11
c b 23 13 23
13
23 a
23 12 12
13 12
b a 13 12
Y Y Y
Y Y Y
Y Y Y
y y y y y
y
y y
y y y
y y
y y y y
Y (2.30)
Dari (2.30) terlihat bahwa:
23 32
23 c b 23 13 33
13 31 13 a
23 12 22
12 21 12 b a 13 12 11
y Y Y y y y y Y
y Y Y y
y y Y
y Y Y y y y y Y
− = = +
+ + =
− = = +
+ =
− = = +
+ + =
;
;
;
(2.31)
Persamaan (2.31) mengindikasikan bahwa sebenarnya matriks admitansi bus Y dapat secara langsung dibentuk dari data input saluran dan trafo. Elemen-elemen Yij dari matriks Y yang berukuran (n×n) dapat dibentuk sebagai berikut:
Untuk elemen-elemen diagonal:
) , , , (
i bus ke terhubung yang
admitansi semua
jumlah
n 2 1 i Yii
K = =
(2.32)
dan untuk elemen-elemen luar-diagonal:
) ; , , , , (
j dan i bus antara admitansi dari
negatif
j i n 2 1 j i Yij
≠ =
=
K (2.33)
Elemen-elemen diagonal Yii biasa disebut sebagai admitansi diri (self-admittance) dari bus-i, sedangkan elemen-elemen luar-diagonal Yij biasa disebut sebagai admitansi bersama (mutual-admittance) antara bus i dan j.
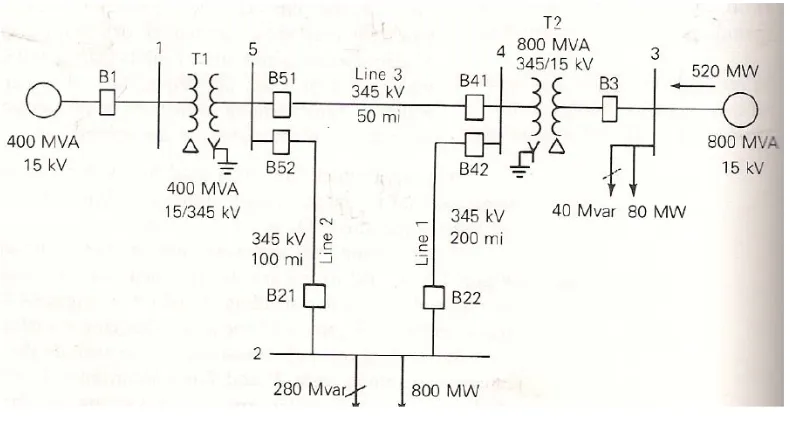
Gambar 2.4 memperlihatkan diagram segaris dari sistem tenaga 5-bus. Data saluran transmisi dan trafo diperlihatkan pada Tabel 2.1. Semua data adalah dalam pu pada dasar 400 MVA.
Gambar 2.4. Sistem Tenaga Untuk Contoh Soal 2.1.
Tabel 2.1. Data Saluran dan Trafo Untuk Contoh Soal 2.1. Bus-Ke-Bus
p – q
Impedansi Seri
zpq
Admitansi Shunt Ketanah
2 y,pq/
2 – 4 0,036 + j0,4 j0,215
2 – 5 0,018 + j0,2 j0,110
4 – 5 0,009 + j0,1 j0,055
1 – 5 0,006 + j0,08 0
3 – 4 0,003 + j0,04 0
Berdasarkan data tersebut, tentukan: a) Admitansi-admitansi diri,
b) Admitansi-admitansi bersama, dan c) Matriks admitansi bus.
Jawab
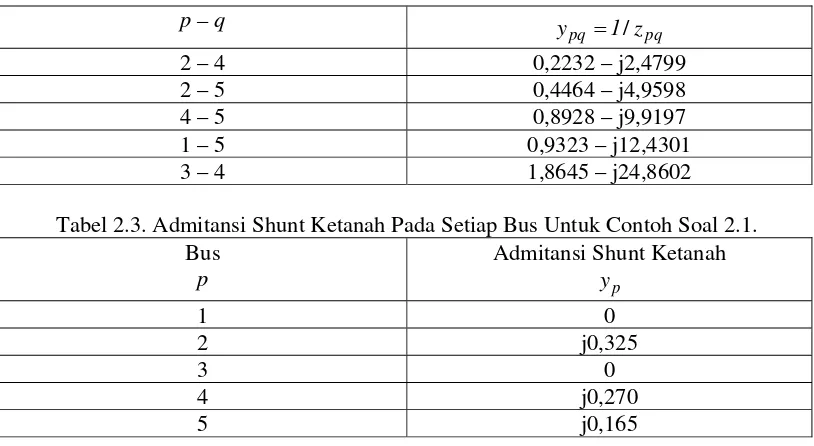
Berdasarkan Tabel 2.1, dapat dihitung admitansi seri jaringan dan admitansi shunt ketanah (kenetral) pada setiap bus, dan hasilnya diperlihatkan berturut-turut pada Tabel 2.2 dan 2.3.
Tabel 2.2. Admitansi Seri Jaringan Untuk Contoh Soal 2.1.
ANALISA SISTEM TENAGA Hal-9
p – q
pq
pq 1 z
y = /
2 – 4 0,2232 – j2,4799
2 – 5 0,4464 – j4,9598
4 – 5 0,8928 – j9,9197
1 – 5 0,9323 – j12,4301
3 – 4 1,8645 – j24,8602
Tabel 2.3. Admitansi Shunt Ketanah Pada Setiap Bus Untuk Contoh Soal 2.1. Bus
p
Admitansi Shunt Ketanah p
y
1 0 2 j0,325 3 0 4 j0,270 5 j0,165
a) Admitansi-admitansi diri:
Y11= y15 =0,9323− j12,4301
1147 7 j 6696 0
325 0 j 9598 4 j 4464 0 4799 2 j 2232 0
y y y
Y22 24 25 2
, ,
) , ( ) , ,
( ) , ,
(
− =
+ −
+ −
=
+ + =
8602 24 j 8645 1 y
Y33= 34= , − ,
9898 36 j 9805 2
270 0 j 9197 9 j 8928 0 8602 24 j 8645 1 4799 2 j 2232 0
y y y y
Y44 24 34 45 4
, ,
) , ( ) , ,
( ) , ,
( ) , ,
(
− =
+ −
+ −
+ −
=
+ + + =
1446 27 j 2715 2
165 0 j 9197 9 j 8928 0 9598 4 j 4464 0 4301 12 j 9323 0
y y y y
Y55 15 25 45 5
, ,
) , ( ) , ,
( ) , ,
( ) , ,
(
− =
+ −
+ −
+ −
=
+ + + =
b)Admitansi-admitansi bersama:
Y12 =Y21=0
Y13 =Y31=0
Y14 =Y41=0
Y15 =Y51=−y15=−0,9323+ j12,4301
Y23=Y32=0
Y25=Y52=−y25=−0,4464+ j4,9598
Y34=Y43=−y34 =−1,8645+ j24,8602
Y35=Y53=0
Y45=Y54=−y45=−0,8928+ j9,9197
c) Matriks admitansi bus:
⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡ =
− +
− +
− +
−
+ − −
+ − +
−
+ − −
+ − +
− −
+ − −
1446 27 j 2715 2 9197 9 j 8928 0 0
9598 4 j 4464 0 4301 12 j 9323 0
9197 9 j 8928 0 9898 36 j 9805 2 8602 24 j 8645 1 4799 2 j 2232 0 0
0 8602
24 j 8645 1 8602 24 j 8645 1 0
0
9598 4 j 4464 0 4799 2 j 2232 0 0
1147 7 j 6696 0 0
4301 12 j 9323 0 0
0 0
4301 12 j 9323 0
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
Y
Soal-Soal Latihan
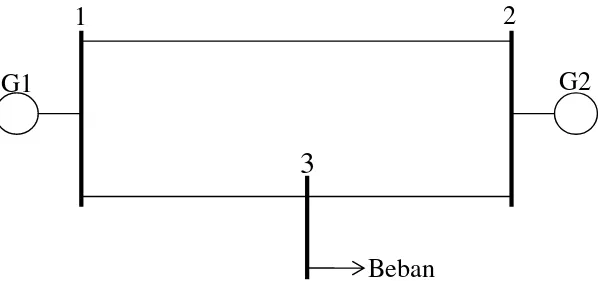
1. Gambar 2.5 memperlihatkan diagram segaris dari sistem tenaga 3-bus. Data saluran transmisi diperlihatkan pada Tabel 2.4. Semua data adalah dalam pu pada dasar 100 MVA.
Gambar 2.5. Sistem Tenaga Untuk Soal Latihan 1.
Tabel 2.4. Data Saluran Untuk Soal Latihan 1. Bus-Ke-Bus
p – q
Impedansi Seri
zpq
Admitansi Shunt Ketanah
2 y,pq/
1 – 2 0 + j0,1 0
2 – 3 0 + j0,2 0
1 – 3 0 + j0,2 0
Berdasarkan data tersebut, tentukan: a) Admitansi-admitansi diri,
b) Admitansi-admitansi bersama, dan
3
Beban
G2
G1
ANALISA SISTEM TENAGA Hal-11 c) Matriks admitansi bus.
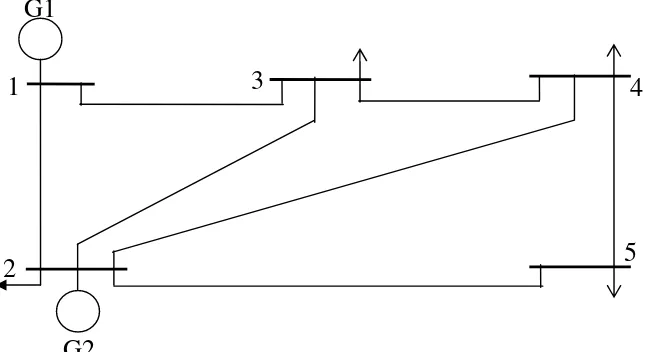
2. Gambar 2.6 memperlihatkan diagram segaris dari sistem tenaga 5-bus. Data saluran transmisi diperlihatkan pada Tabel 2.5. Semua data adalah dalam pu pada dasar 100 MVA.
Gambar 2.6. Sistem Tenaga Untuk Soal Latihan 2.
Tabel 2.5. Data Saluran Untuk Soal Latihan 2. Bus-Ke-Bus
p – q
Impedansi Seri
zpq
Admitansi Shunt Ketanah
2 y,pq/
1 – 2 0,02 + j0,06 j0,030
1 – 3 0,08 + j0,24 j0,025
2 – 3 0,06 + j0,18 j0,020
2 – 4 0,06 + j0,18 j0,020
2 – 5 0,04 + j0,12 j0,015
3 – 4 0,01 + j0,03 j0,010
4 – 5 0,08 + j0,24 j0,025
Berdasarkan data tersebut, tentukan: a) Admitansi-admitansi diri,
b) Admitansi-admitansi bersama, dan c) Matriks admitansi bus.
2.4. FORMULASI MASALAH ALIRAN DAYA
Kita lanjutkan pembahasan mengenai masalah aliran daya dengan melihat kembali daya yang ditransmisikan seperti yang dinyatakan oleh (2.5c) yaitu:
5
4
3
2
1
G1
STi=PTi+ jQTi =ViITi∗ ;i=1,2,K,n (2.5c)
Dari pembahasan sebelumnya juga telah disinggung bahwa arus ITi ini, yang merupakan arus generator dikurangi arus beban, adalah juga merupakan elemen-elemen dari vektor arus injeksi seperti yang dirumuskan oleh (2.28), maka:
IT =YV (2.34) atau:
= ∑ =
n
1
j ij j
Ti YV
I (2.35)
Oleh karena:
j i i
i V e
V = δ (2.36a)
j ij ij
ij Y e
Y = θ (2.36b)
Substitusi (2.36) ke (2.35), diperoleh :
n j( j ij) 1
j ij j
Ti Y V e
I δ +θ
=
∑
= (2.37)
atau:
n j( j ij) 1
j ij j
Ti Y V e
I −δ −θ
=
∗ = ∑ (2.38)
Substitusi (2.36a) dan (2.38) ke (2.5c), diperoleh :
n j( i j ij) 1
j i ij j
Ti
Ti jQ V Y V e
P δ −δ −θ
=
∑ =
+ (2.39)
Dengan memisahkan bagian riil dan imajiner, dapat ditunjukkan bahwa daya aktif dan reaktif yang ditransmisikan dapat dinyatakan sebagai :
= ∑ δ −δ −θ =
n
1 j
ij j i j ij i
Ti V Y V
P cos( ) (2.40a)
= ∑ δ −δ −θ =
n
1
j i ij j i j ij
Ti V Y V
Q sin( ) (2.40b)
ANALISA SISTEM TENAGA Hal-13
P P P V Y V 0
n
1 j
ij j i j ij i Li
Gi
i =− + +
∑
− − ==
)
cos(δ δ θ (2.41a)
Q Q Q V Y V 0
n
1 j
ij j i j ij i Li
Gi
i =− + +
∑
− − ==
)
sin(δ δ θ (2.41b)
Persamaan (2.41) menyatakan 2n persamaan aliran daya untuk n bus sistem tenaga. Oleh karena studi aliran daya biasanya dilakukan pada kondisi beban tertentu (PLi dan QLi diketahui), maka masing-masing bus akan dikarakterisasi melalui empat variabel : PGi,
QGi, |Vi|, dan δi sehingga menghasilkan total 4n variabel. Pers. (2.41) hanya dapat diselesaikan jika 2n variabel dari 4n variabel tersebut ditetapkan atau dispesifikasi.
Seperti yang telah diuraikan sebelumnya, variabel-variabel yang dispesifikasi ini biasanya adalah variabel-variabel yang dapat dikontrol secara fisik. Dengan demikian, penetapan variabel apa yang akan dispesifikasi pada suatu bus tertentu akan sangat dipengaruhi oleh peralatan apa yang terhubung pada bus tersebut. Berdasarkan hal ini, kita akan memiliki tiga pilihan, dimana pilihan-pilihan tersebut akan diidentifikasi dengan mendefinisikan tiga jenis bus seperti berikut:
(1) Bus Referensi (Slack Bus/Swing Bus)
Pada bus tipe ini PGi dan QGi tidak dispesifikasi akan tetapi yang dispesifikasi adalah |Vi| dan δi. Umumnya, untuk suatu sistem tenaga hanya terdapat satu bus tipe ini dan bus ini haruslah berupa bus generator.
(2) Bus Pembangkit (PV/Voltage Controlled Bus)
Pada bus tipe ini besaran yang dispesifikasi atau diketahui adalah PGi dan |Vi| dan besaran yang ingin dicari adalah QGi dan δi.
(3) Bus Beban/PQ (Load/PQ Bus)
Pada bus tipe ini, daya bersih PGi dan QGi diketahui (sama dengan nol). Kuantitas yang akan dicari adalah |Vi| dan δi.
Jenis bus yang pertama yaitu slack bus pada dasarnya merupakan bus pembangkit yang tidak memiliki limitasi. Hal yang melatar-belakangi konsep bus referensi ini adalah karena pada teori rangkaian ac kita dapat memilih satu besaran phasor sebagai referensi. Bila hal ini kita terapkan pada bus referensi, maka sudut fasa dari tegangan pada bus referensi diset kenilai nol. Kita juga biasanya men-set besar tegangan pada bus ini pada nilai 1,0 pu. Nilai lain selain 1,0 pu juga dimungkinkan untuk dipilih, karena slack bus
adalah bus pembangkit, adalah normal bila ia beroperasi pada nilai yang sedikit lebih tinggi (misalnya 1,05 pu).
Jenis bus yang kedua adalah bus generator. Pada bus-bus ini, besar tegangan |Vi| dan daya aktif PGi dijaga konstan pada suatu nilai tertentu. Hal ini dimungkinkan karena sistem turbin dan eksitasi generator mengijinkan kita untuk mengontrol PGi dan |Vi|. Dengan demikian kita dapat men-set nilai-nilai PGi dan |Vi| tersebut pada suatu nilai tertentu dan menetapkannya sebagai variabel-variabel yang diketahui. Suatu sistem tenaga tipikal dapat memiliki bus generator sebanyak kira-kira 15% dari total bus sistem.
memiliki bus beban sebanyak kira-kira 85% dari total bus yang ada. Pada bus-bus beban ini, |Vi| dan δi merupakan variabel-variabel yang tidak diketahui atau ingin dicari.
Perlu juga dicatat disini bahwa oleh karena adanya limitasi fisik dari generator, besar daya reaktif yang dibangkitkan pada bus-bus generator harus berada diantara nilai minimum dan maksimum sesuai batasan operasi dari generator tersebut. Hal ini berarti bahwa ketika kita menghitung QGi, kita harus memeriksa apakah QGi,min ≤QGi ≤QGi,maks. Jika QGi berada diluar batasan ini, maka ia harus diset pada nilai limitnya. Contohnya jika
min ,
Gi Gi Q
Q < (atau QGi >QGi,maks), maka QGi harus diset pada QGi,min (atau QGi,max), dan besar tegangan pada bus-i tersebut (|Vi|) menjadi tidak konstan lagi atau |Vi| menjadi besaran yang harus dihitung. Hal ini sama saja dengan mengubah tipe bus tersebut dari bus PV menjadi bus PQ. Prosedur matematis untuk penyelesaian masalah aliran daya akan dibahas di Subbab 2.5.
2.5. SOLUSI ALIRAN DAYA DENGAN METODA NEWTON-RAPHSON 2.5.1. Metoda Newton Raphson
Persamaan (2.41) merupakan seset persamaan nonlinier dengan jumlah persamaan 2n
dimana n adalah jumlah bus dalam sistem tenaga. Metoda Newton-Raphson adalah
metoda yang paling sering digunakan untuk menyelesaikan suatu sistem persamaan nonlinier. Dalam mencari solusi, metoda Newton-Raphson menggunakan teknik iteratif. Dengan teknik iteratif ini, pencarian solusi dimulai dengan estimasi awal untuk variabel yang ingin dicari. Estimasi tersebut kemudian diperbaiki secara berturutan sampai solusi yang diinginkan diperoleh. Apabila solusinya telah didapat, maka dikatakan bahwa solusinya telah konvergen.
Sebelum membahas tentang aplikasi metoda Newton-Raphson pada masalah aliran daya, berikut adalah penjelasan mengenai penggunaan metoda tersebut pada sistem persamaan
nonlinier umum. Misalkan seset persamaan nonlinier dengan jumlah persamaan n
diberikan oleh:
F X =0
⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢
⎣ ⎡
=
) , , , (
) , , , (
) , , , (
) (
2 1
2 1 2
2 1 1
n n
n n
x x x f
x x x f
x x x f
K M
K K
(2.42)
dimana X =
[
x1 x2 L xn]
T adalah variabel yang akan dicari.Langkah iteratif dari metoda Newton-Raphson dalam mencari solusi adalah dengan menyelesaikan persamaan berikut secara berturutan:
X(k+1) =X(k)+ΔX(k) (2.43) dimana:
ANALISA SISTEM TENAGA Hal-15 Pada (2.44), J(X) merupakan Jacobian dari F(X) dan dihitung melalui:
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣ ⎡
∂ ∂ ∂
∂ ∂ ∂
∂ ∂ ∂
∂ ∂
∂ ∂
∂ ∂
∂ ∂ ∂
=
n n 2
n 1 n
n 2 2
2 1 2
n 1 2
1 1 1
x f x
f x f
x f x
f x f
x f x
f x f
L M O M M
L L
) (X
J (2.45)
Dengan demikian, langkah-langkah dari metoda Newton-Raphson dalam mencari solusi adalah sesuai algoritma berikut:
Langkah 1: Set k = 0, dan tentukan estimasi awal untuk solusi X(k) dan toleransi ε. Langkah 2: Cek apakah: maks|F(X(k))|< ε, Jika ya, stop dan solusinya adalah X(k). Jika tidak, lanjutkan ke Langkah 3.
Langkah 3: Hitung Jacobian J(X(k)) dan ΔX(k) melalui (2.44). Langkah 4: Hitung X(k+1) atau perbaiki nilai estimasi melalui (2.43). Langkah 5: Set k = k + 1, dan kembali ke Langkah 2.
Perlu juga ditambahkan disini bahwa penyelesaian (2.41) untuk ΔX biasanya tidak dilakukan dengan cara menginvers matriks, akan tetapi dilakukan melalui cara eliminasi (misalnya eliminasi Gauss).
Contoh Soal 2.2
Dengan metoda Newton-Raphson, selesaikan sistem persamaan nonlinier berikut:
0 x x
0 1 x x
2 2 2 1
2 2 2 1
= −
= − +
Ambil estimasi awal untuk solusi x1(0) =x2(0) =1, dan toleransi ε = 0,01.
Jawab
Untuk persoalan diatas kita definisikan vektor-vektor X, F(X) dan matriks Jacobian berturut-turut sebagai:
⎥ ⎦ ⎤ ⎢ ⎣ ⎡ =
2 1 x x
X
⎥ ⎥ ⎦ ⎤ ⎢
⎢ ⎣ ⎡
− − + = ⎥ ⎦ ⎤ ⎢
⎣ ⎡
= 2
2 2 1
2 2 2 1 2
1
x x
1 x x f
f
) (
) ( ) (
X X X
⎥
Berikut adalah iterasi metoda Newton-Raphson yang dimulai dari estimasi awal
[
]
TIterasi ke-0:
Nilai vektor fungsi:
⎥ Matriks Jacobian:
⎥
Nilai koreksi untuk solusi:
⎥
Nilai estimasi yang baru:
⎥
Iterasi ke-1:
Nilai vektor fungsi:
⎥
Matriks Jacobian:
⎥
ANALISA SISTEM TENAGA Hal-17
⎥ ⎦ ⎤ ⎢
⎣ ⎡ − − = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎦ ⎤ ⎢
⎣ ⎡
− −
= Δ
−
0417 0
0417 0
0 125 0
5 1 5 1
5 1 5
1 1
1
, , ,
, ,
, ,
) (
X
Nilai estimasi yang baru:
⎥ ⎦ ⎤ ⎢
⎣ ⎡ = ⎥ ⎦ ⎤ ⎢
⎣ ⎡ − − + ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ =
7083 0
7083 0
0417 0
0417 0
75 0
75 0 2
, , ,
, ,
,
) (
X
Iterasi ke-2:
Nilai vektor fungsi:
⎥ ⎦ ⎤ ⎢
⎣ ⎡ = ⎥ ⎥ ⎦ ⎤ ⎢
⎢ ⎣ ⎡
−
− +
=
0 0034 0
7083 0 7083 0
1 7083 0 7083 0
2 2
2 2
2 ,
) , ( ) , (
) , ( ) , ( ) (X( ) F
Oleh karena maks|F(X(2))|=0,0034<ε, maka proses perhitungan distop, dan solusinya adalah x1 =x2 =0,7083.
Soal-Soal Latihan
1. Dengan metoda Newton-Raphson, selesaikan sistem persamaan nonlinier berikut:
0 5 x 2 x x
0 4 x x 3 x
2 2 2 1
2 1 2 1
= + −
= − +
Ambil estimasi awal untuk solusi x1(0) =1;x2(0) =2, dan toleransi ε = 0,0001.
2. Dengan metoda Newton-Raphson, selesaikan sistem persamaan nonlinier berikut:
0 4 x 6 x x 2
0 9 x 4 x x
0 2 x x x
3 3 2 2 1
2 3 2 2 2 1
3 2 1
= − + +
= − + +
= −
Ambil estimasi awal untuk solusi x1(0) =x2(0) =x3(0) =−1, dan toleransi ε = 0,0001.
2.5.2. Aplikasi Metoda Newton-Raphson Pada Masalah Aliran Daya
dimana n adalah jumlah total bus sistem tenaga.
Pada (2.46), Pidan Qi biasa disebut sebagai selisih daya (power mismatch) dan ditentukan berdasarkan (2.41). Selisih daya ini sering digunakan sebagai kriteria penghentian iterasi metoda Newton-Raphson. Sedangkan matriks Jacobian dari (2.45), untuk masalah aliran daya akan berbentuk:
dimana matriks Jacobian tersebut telah dipartisi menjadi empat submatriks yang masing-masing berbentuk:
ANALISA SISTEM TENAGA Hal-19 Submatriks J1(δ,|V|):
∑
≠ =− − −
= ∂
∂ n
i j
1 j
ij j i ij j i i
i V V Y
P
)
sin(δ δ θ
δ (2.50)
P ViVk Yik i k ik i k
k
i = − − ≠
∂ ∂
; )
sin(δ δ θ
δ (2.51)
Submatriks J2(δ,|V|):
∑
=
− − +
= ∂
∂ n
1 j
ij j i ij j ii
ii i i
i V Y V Y
V P
) cos(
cosθ δ δ θ (2.52)
V Y i k
V P
ik k i ik i k
i = − − ≠
∂ ∂
; )
cos(δ δ θ (2.53)
Submatriks J3(δ,|V|):
∑
≠ =− − =
∂
∂ n
i j
1 j
ij j i ij j i i
i V V Y
Q
)
cos(δ δ θ
δ (2.54)
Q Vi Vk Yik i k ik i k
k
i =− − − ≠
∂ ∂
; )
cos(δ δ θ
δ (2.55)
Submatriks J4(δ,|V|):
∑
=
− − +
− = ∂
∂ n
1 j
ij j i ij j ii
ii i i
i V Y V Y
V Q
) sin(
sinθ δ δ θ (2.56)
V Y i k
V Q
ik k i ik i k
i = − − ≠
∂ ∂
; )
sin(δ δ θ (2.57)
Dengan demikian, langkah iteratif dari metoda Newton-Raphson dalam mencari solusi aliran daya adalah dengan menyelesaikan persamaan berikut secara berturutan:
⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢
⎣ ⎡
Δ Δ + ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢
⎣ ⎡ = ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢
⎣ ⎡
+ +
) (
) (
) (
) (
) (
) (
k k
k k
1 k
1 k
V
δ
V
δ
V
δ
L L L
L L
L (2.58)
Sebagai contoh, untuk sistem tenaga dengan jumlah bus 3, (2.58) dan (2.59) berturut-turut akan berbentuk:
Seperti yang sebelumnya telah diuraikan di Subbab 2.4, pada bus referensi (slack bus), sudut tegangan δslack dan besar tegangan |Vslack| adalah diketahui dan konstan. Oleh karenanya, nilai-nilai koreksi untuk sudut Δδslack dan besar tegangan Δ|Vslack| pada bus ini tidak perlu dihitung. Telah dibahas juga bahwa pada bus ini tidak ada pembatasan untuk
PG,slack dan QG,slack, maka kita dapat membuat PG,slack dan QG,slack sedemikian rupa sehingga Pslack dan Qslack menjadi nol. Berdasarkan hal ini, kita dapat menghapus dua baris dan dua kolom yang bersesuaian dari matriks Jacobian dan mengeliminir Δδslack dan
ANALISA SISTEM TENAGA Hal-21
Lebih lanjut, seperti yang juga telah diuraikan di Subbab 2.4 bahwa pada bus-bus pembangkit (PV bus), besar tegangan adalah diketahui. Perlu juga dicatat bahwa sepanjang QG,min≤QG,PV ≤QG,maks, kita dapat membangkitkan QG,PV sedemikian rupa sehingga QPV menjadi nol. Hal ini mengijinkan kita untuk mengeliminir Δ|VPV| sebagai variabel iteratif, dan menghapus baris-baris dan kolom-kolom yang bersesuaian dari matriks Jacobian. Sebagai contoh, untuk sistem tenaga 3 bus dimana diasumsikan bus 1, 2 dan 3 berturut-turut adalah bus slack, PV dan PQ, maka persamaan iteratif Newton-Raphson (2.62) dan (2.63) akan menjadi:
) (
) (
) (
) ( )
( ) (
) ( )
( ) (
) ( )
( ) (
) (
) (
) (
⎥ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎢
⎣ ⎡
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣ ⎡
∂ ∂ δ
∂ ∂ δ ∂ ∂
∂ ∂ δ
∂ ∂ δ ∂ ∂
∂ ∂ δ
∂ ∂ δ ∂ ∂
− =
⎥ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎢
⎣ ⎡
Δ δ Δ
δ Δ
−
k 3
k 3
k 2 1
3 k 3 3
k 3 2
k 3
3 k 3 3
k 3 2 k 3
3 k 2 3
k 2 2 k 2
k 3
k 3
k 2
Q P P
V Q Q
Q
V P P
P
V P P
P
V
L L
M M
L L M L L L L
M M M M
L
L (2.65)
Berikut adalah algoritma dari metoda Newton-Raphson dalam mencari solusi masalah aliran daya:
Langkah 1: Set hitungan iterasi k = 0. Tentukan nilai-nilai estimasi awal untuk sudut δi(k) dan besar tegangan bus (k)
i
V serta toleransi yang diinginkan. Nilai-nilai awal untuk sudut tegangan biasanya diambil 0, sedangkan besar tegangan biasanya diambil 1 pu.
Langkah 2: Hitung nilai-nilai selisih daya (k) i
P dan (k)
i
Q melalui (2.41). Jika semua
nilainya berada dibawah toleransi, artinya bahwa solusi telah diperoleh, maka iterasi distop. Jika ada selisih daya yang nilainya belum dibawah toleransi, maka lanjutkan ke langkah berikutnya.
Langkah 3: Hitung Jacobian J(k) melalui (2.47), dan dapatkan nilai-nilai koreksi untuk sudut dan besar tegangan melalui (2.59).
Langkah 4: Perbaiki nilai-nilai sudut dan besar tegangan melalui (2.58). Langkah 5: Set: k = k + 1, dan kembali ke Langkah 2.
Pada Langkah 2 dari algoritma diatas, jika ada nilai QG,PV yang berada diluar batas-batasnya, maka QG,PV harus diset pada nilai limitnya, dan tipe busnya diganti menjadi bus PQ. Pada kasus seperti ini, Δ|VPV| akan menjadi variabel iteratif atau harus dihitung, dan baris-baris/kolom-kolom yang bersesuaian dari matriks Jacobian yang tadinya dihilangkan harus disisipkan kembali. Jika pada iterasi berikutnya, QG,PV berada pada batas-batasnya, tipe busnya diubah kembali menjadi bus PV.
2.5.3. Aliran Daya Pada Saluran Dan Daya Bus Slack
Setelah algoritma dari metoda Newton-Raphson berhasil mendapatkan solusi, aliran daya pada saluran-saluran dan besar pembangkitan daya dari bus-bus pembangkit dapat dihitung.
Bila dimisalkan bahwa saluran yang menghubungkan bus p dan q memiliki admitansi seri
ypq dan admitansi shunt total y,pq, maka arus yang mengalir pada saluran tersebut akan diberikan oleh:
2 y V y V V
Ipq p q pq p pq
, )
( − +
ANALISA SISTEM TENAGA Hal-23 Sehingga, aliran daya dari bus p ke q diberikan oleh:
[( ) ]
,
2 y V y V V V I V jQ
Ppq pq p pq p p q pq p pq
∗ ∗ ∗ ∗
∗ = − +
=
+ (2.67)
Dengan cara yang sama, aliran daya dari bus q ke p diberikan oleh:
[( ) ]
,
2 y V y V V V I V jQ
Pqp qp q qp q q p pq q pq
∗ ∗ ∗ ∗
∗ = − +
=
+ (2.68)
Rugi-rugi daya pada saluran p-q dapat dihitung dengan menjumlahkan Ppq+ jQpq dan
qp qp jQ
P + .
Daya yang dibangkitkan pada bus slack dapat dihitung dengan menjumlahkan semua aliran daya pada saluran yang keluar dari bus tersebut. Alternatif lain adalah dengan menggunakan (2.6).
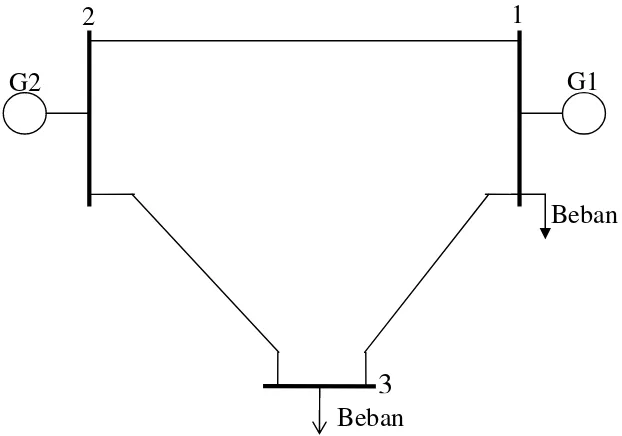
Contoh Soal 2.3
Gambar 2.7 memperlihatkan diagram segaris sistem tenaga 3 bus. Tabel 2.6 dan 2.7 menunjukkan data-data untuk sistem tenaga tersebut. Semua data adalah dalam pu (kecuali δ) pada dasar 100 MVA dan 345 kV.
Gambar 2.7. Sistem Tenaga Untuk Contoh Soal 2.3.
Beban
3
Beban
G1
G2
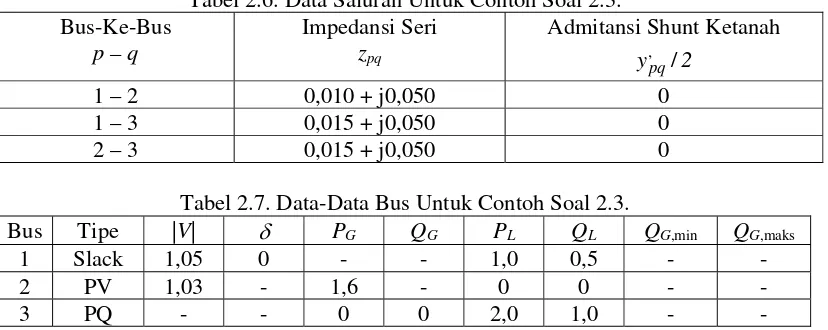
Tabel 2.6. Data Saluran Untuk Contoh Soal 2.3. Bus-Ke-Bus
p – q
Impedansi Seri
zpq
Admitansi Shunt Ketanah
2 y,pq/
1 – 2 0,010 + j0,050 0
1 – 3 0,015 + j0,050 0
2 – 3 0,015 + j0,050 0
Tabel 2.7. Data-Data Bus Untuk Contoh Soal 2.3.
Bus Tipe |V| δ PG QG PL QL QG,min QG,maks
1 Slack 1,05 0 - - 1,0 0,5 - -
2 PV 1,03 - 1,6 - 0 0 - -
3 PQ - - 0 0 2,0 1,0 - -
Untuk sistem tenaga tersebut: a. Dapatkan matriks admitansi bus.
b. Tentukan vektor dari sudut/besar tegangan bus dan selisih daya (power mismatch). c. Tuliskan rumus untuk elemen-elemen dari vektor selisih daya.
d. Tuliskan rumus untuk matriks Jacobian.
e. Tuliskan persamaan iteratif Newton-Raphson untuk solusi aliran daya.
f. Lakukan iterasi Newton-Raphson untuk mendapatkan solusi (ambil toleransi 0,01). g. Hitung daya yang dibangkitkan generator.
h. Hitung aliran daya dan rugi-rugi daya pada saluran-saluran.
i. Nyatakan nilai-nilai tegangan bus, daya yang dibangkitkan dan aliran daya tersebut pada diagram segaris.
j. Cek keseimbangan daya dengan memeriksa apakah total pembangkitan sama dengan
total beban ditambah total rugi-rugi daya.
Jawab
a. Admitansi seri saluran untuk sistem tenaga pada Gambar 2.7 diperlihatkan pada Tabel 2.8.
Tabel 2.8. Admitansi Seri Jaringan Untuk Contoh Soal 2.3. Bus-Ke-Bus
p – q
Admitansi Seri pq
pq 1 z
y = /
1 – 2 3,8462 – j19,2308
1 – 3 5,5046 – j18,3486
2 – 3 5,5046 – j18,3486
Maka, matriks admitansi bus:
⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢
⎣ ⎡
− +
− +
−
+ −
− +
−
+ −
+ −
− =
6972 36 j 0092 11 3486 18 j 5046 5 3486 18 j 5046 5
3486 18 j 5046 5 5794 37 j 3507 9 2308 19 j 8462 3
3486 18 j 5046 5 2308 19 j 8462 3 5794 37 j 3507 9
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
, ,
Y
ANALISA SISTEM TENAGA Hal-25
b. Oleh karena bus 1 adalah bus slack dan bus 2 adalah bus PV, maka vektor dari
sudut/besar tegangan bus dan vektor dari selisih daya adalah:
c. Berdasarkan (2.41), rumus untuk elemen-elemen dari vektor selisih daya adalah:
d. Matriks Jacobian:
Berikut adalah rumusan untuk elemen-elemen dari matriks Jacobian yang ditentukan berdasarkan (2.50) s/d (2.57).
Elemen-elemen pada submatriks J1:
)
ANALISA SISTEM TENAGA Hal-27
Elemen-elemen pada submatriks J3:
)
Elemen-elemen pada submatriks J4:
)
f. Iterasi Newton-Raphson dimulai dengan estimasi awal:
⎥
Berikut adalah perhitungan-perhitungan iterasi Newton-Raphson.
Iterasi k = 0:
Melalui rumus-rumus yang telah diturunkan pada point c, selisih daya (power
ANALISA SISTEM TENAGA Hal-29
Oleh karena nilai absolut maksimum dari selisih daya (yaitu 1,5593) masih lebih besar dari toleransi (0,01), maka proses perhitungan dilanjutkan.
Berdasarkan rumus-rumus pada point d, elemen-elemen dari matriks Jacobian:
6706
Sehingga matriks Jacobian:
[ ]
Nilai-nilai koreksi untuk estimasi solusi:
⎥
ANALISA SISTEM TENAGA Hal-31
Selisih daya (power mismatch):
0083
Oleh karena nilai absolut maksimum dari selisih daya (yaitu 0,0343) masih lebih besar dari toleransi (0,01), maka proses perhitungan dilanjutkan.
Elemen-elemen dari matriks Jacobian:
ANALISA SISTEM TENAGA Hal-33 Sehingga matriks Jacobian:
[ ]
Nilai-nilai koreksi untuk estimasi solusi:
⎥
Nilai-nilai estimasi yang baru untuk solusi:
⎥
Selisih daya (power mismatch):
0008
Oleh karena nilai absolut maksimum dari selisih daya (yaitu 0,0013) sudah lebih kecil dari toleransi (0,01), maka proses perhitungan distop, dan solusi dari iterasi Newton-Raphson adalah δ2 =0,0238rad=1,36deg, degδ3 =−0,0291rad=−1,67 , dan
pu ,9990 0
V3 = .
g. Berdasarkan (2.41), daya yang dibangkitkan generator-generator adalah:
Generator 1 (Generator Pada Bus Slack):
ANALISA SISTEM TENAGA Hal-35 Generator 2 (Generator Pada Bus PV):
PG2 =1,6 (telah ditentukan/dispesifikasi)
Hasil perhitungan tegangan dan daya bus diatas diringkaskan pada Tabel.2.9.
Tabel 2.9. Tegangan Dan Daya Bus Untuk Sistem Pada Gambar 2.7.
Bus Tipe |V| δ PG QG PL QL QG,min QG,maks
1 Slack 1,05 0 1,4441 1,8316 1,0 0,5 - -
2 PV 1,03 1,36 1,6 -0,1763 0 0 - -
3 PQ 0,9990 -1,67 0 0 2,0 1,0 - -
h. Berdasarkan (2.67) dan (2.68), aliran-aliran daya adalah:
Dengan cara yang sama, perhitungan aliran daya dan rugi-rugi daya pada saluran-saluran yang lain dapat dilakukan, dan hasilnya diperlihatkan pada Tabel 2.10.
Tabel 2.10. Aliran Daya Dan Rugi-Rugi Daya Untuk Sistem Pada Gambar 2.7. Saluran Bus
p - q
Aliran Daya p ke q
Aliran Daya q ke p
Rugi-Rugi Daya
1 1 – 2 -0,413+j0,509 0,417-j0,489 0,004+j0,020
2 1 – 3 0,858+j0,822 -0,838-j0,758 0,020+j0,064
3 2 – 3 1,183+j0,312 -1,162-j0,242 0,021+j0,070
Total Rugi-Rugi Daya 0,045+j0,154
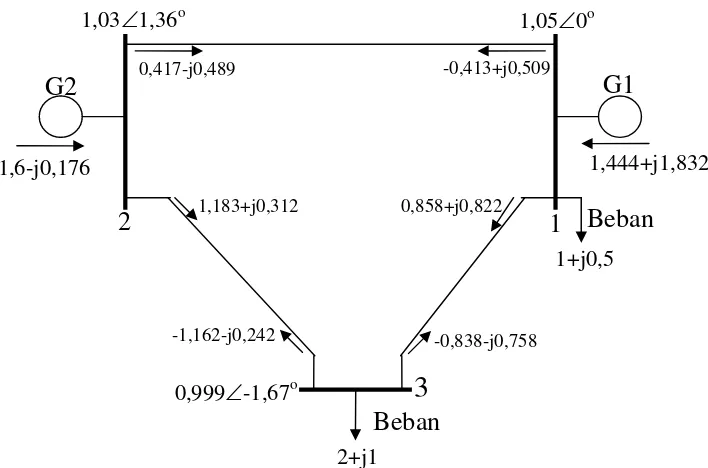
i. Gambar 2.8 memperlihatkan nilai-nilai tegangan bus, daya yang dibangkitkan dan aliran daya pada diagram segaris.
Gambar 2.8. Hasil Studi Aliran Daya Untuk Sistem Gambar 2.7.
j. Berikut adalah ringkasan dari hasil studi aliran daya:
Total Pembangkitan = (1,444+j1,832)+(1,6-j0,176) = 3,044+j1,656 Total Beban = (1+j0,5)+(2+j1) = 3+j1,5
Total Rugi-Rugi = 0,045+j0,154
Karena total pembangkitan sama dengan total beban ditambah total rugi-rugi daya, maka keseimbangan daya terpenuhi.
-1,162-j0,242 1,183+j0,312
-0,838-j0,758 0,858+j0,822
0,417-j0,489 -0,413+j0,509
1,6-j0,176 1,444+j1,832
2+j1
1+j0,5
0,999∠-1,67o
1,03∠1,36o 1,05∠0o
Beban
3
Beban
G1
G2
ANALISA SISTEM TENAGA Hal-37 Soal-Soal Latihan
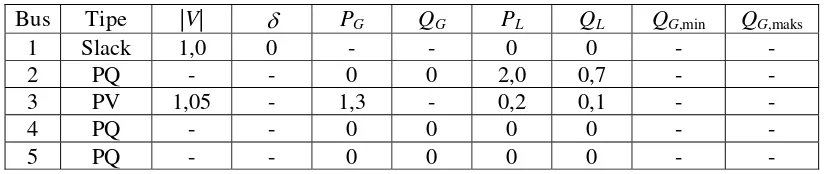
1. Tabel 2.11 menunjukkan data-data bus untuk sistem tenaga yang diagram segarisnya diperlihatkan pada Gambar 2.4 dan data jaringannya pada Tabel 2.1. Semua data dalam pu (kecuali δ) pada dasar 400 MVA dan 15 kV pada bus 1. Untuk sistem tenaga tersebut:
a. Dapatkan matriks admitansi bus.
b. Tentukan vektor dari sudut/besar tegangan bus dan selisih daya (power
mismatch).
c. Tuliskan rumus untuk elemen-elemen dari vektor selisih daya. d. Tuliskan rumus untuk matriks Jacobian.
e. Tuliskan persamaan iteratif Newton-Raphson untuk solusi aliran daya.
f. Lakukan iterasi Newton-Raphson untuk mendapatkan solusi (ambil toleransi
0,01).
g. Hitung daya yang dibangkitkan generator.
h. Hitung aliran daya dan rugi-rugi daya pada saluran-saluran.
i. Nyatakan nilai-nilai tegangan bus, daya yang dibangkitkan dan aliran daya
tersebut pada diagram segaris.
j. Cek keseimbangan daya dengan memeriksa apakah total pembangkitan sama
dengan total beban ditambah total rugi-rugi daya.
Tabel 2.11. Data-Data Bus Untuk Sistem Gambar 2.4.
Bus Tipe |V| δ PG QG PL QL QG,min QG,maks
1 Slack 1,0 0 - - 0 0 - -
2 PQ - - 0 0 2,0 0,7 - -
3 PV 1,05 - 1,3 - 0,2 0,1 - -
4 PQ - - 0 0 0 0 - -
5 PQ - - 0 0 0 0 - -
2. Tabel 2.12 menunjukkan data-data bus untuk sistem tenaga yang diagram segarisnya diperlihatkan pada Gambar 2.6 dan data jaringannya pada Tabel 2.5. Semua data dalam pu (kecuali δ) pada dasar 100 MVA. Untuk sistem tenaga tersebut:
a. Dapatkan matriks admitansi bus.
b. Tentukan vektor dari sudut/besar tegangan bus dan selisih daya (power
mismatch).
c. Tuliskan rumus untuk elemen-elemen dari vektor selisih daya. d. Tuliskan rumus untuk matriks Jacobian.
e. Tuliskan persamaan iteratif Newton-Raphson untuk solusi aliran daya.
f. Lakukan iterasi Newton-Raphson untuk mendapatkan solusi (ambil toleransi
0,01).
g. Hitung daya yang dibangkitkan generator.
h. Hitung aliran daya dan rugi-rugi daya pada saluran-saluran.
i. Nyatakan nilai-nilai tegangan bus, daya yang dibangkitkan dan aliran daya
tersebut pada diagram segaris.
j. Cek keseimbangan daya dengan memeriksa apakah total pembangkitan sama
Tabel 2.12. Data-Data Bus Untuk Sistem Gambar 2.6.
Bus Tipe |V| δ PG QG PL QL QG,min QG,maks
1 Slack 1,06 0 - - 0 0 - -
2 PV 1,05 - 0,4 - 0,2 0,1 - -
3 PQ - - 0 0 0,45 0,15 - -
4 PQ - - 0 0 0,4 0,05 - -
5 PQ - - 0 0 0,6 0,1 - -
2.6. ALIRAN DAYA FAST DECOUPLED
Aliran daya fast decoupled merupakan penyederhanaan dari metoda Newton-Raphson. Uraian tentang penyederhanaan ini akan dimulai dengan menulis kembali (2.59) sebagai:
P =−J1Δδ−J2Δ|V | (2.69a) Q=−J3Δδ−J4Δ|V | (2.69b)
Suatu karakteristik yang menarik dari setiap sistem tenaga yang beroperasi pada keadaan mantap (steady-state) adalah adanya ketergantungan yang kuat antara daya-aktif dan sudut tegangan (P-δ), serta antara daya-reaktif dan besar tegangan (Q-|V|). Hal ini berarti bahwa daya-aktif P akan lebih sensitif terhadap perubahan sudut tegangan (Δδ), dan kurang sensitif terhadap perubahan besar tegangan (Δ|V|). Sedangkan daya-reaktif Q akan sangat tergantung pada perubahan besar tegangan (Δ|V|), dan kurang tergantung pada perubahan sudut tegangan (Δδ).
Dengan demikian, berdasarkan uraian diatas, (2.69) dapat diaproksimasi melalui:
P =−J1Δδ (2.70a) Q=−J4Δ|V| (2.70b)
Waktu yang diperlukan untuk menyelesaikan (2.70) akan jauh lebih singkat dibandingkan waktu penyelesaian (2.69). Reduksi lebih lanjut dari waktu perhitungan akan dapat diperoleh dengan melakukan penyederhanaan pada submatriks Jacobian J1 dan J4 seperti berikut.
Elemen-elemen diagonal dari J1 yang dirumuskan melalui (2.50) dapat ditulis sebagai:
Ti ii 2 i
Ti ii ii
i i
n
1
j i j ij i j ij
ii i i ii i i i i
Q B V
Q Y
V V
Y V V Y
V V P
− −
=
− θ − =
∑ δ −δ −θ
− θ − δ − δ =
δ ∂ ∂
=
) sin(
) sin(
) sin(
(2.71)
ANALISA SISTEM TENAGA Hal-39 |Vi|≈1 (2.72)
dan untuk suatu sistem tenaga biasanya:
ii 2 i
Ti V B
Q <<| | (2.73) maka (2.71) dapat diaproksimasi menjadi:
ii i
i B
P ≈−
δ ∂ ∂
(2.74)
Sedangkan elemen-elemen luar diagonal J1 yang dinyatakan melalui (2.51) yaitu:
i k ik sin( i k ik) k
i V V Y
P = δ −δ −θ
δ ∂
∂
(2.51)
dapat diaproksimasi melalui:
i k ik ik i k ik k
i V V Y V V B
P ≈ −θ ≈−
δ ∂
∂
)
sin( (2.75)
Aproksimasi (2.75) diperoleh dengan mengasumsikan bahwa:
δi ≈δk (2.76)
Dengan menggunakan (2.72) pada (2.75) akan diperoleh:
ik k
i B
P ≈−
δ ∂
∂
(2.77)
Dengan demikian, kombinasi dari (2.74) dan (2.77) akan menghasilkan:
B'
δ
P
J =
∂ ∂ =
1 (2.78)
dimana B’ merupakan matriks yang dibentuk dari matriks –B. Sedangkan B adalah matriks suseptansi dan dibentuk dari bagian-bagian imajiner dari matriks admitansi Y atau:
B=Im(Y) (2.79)
Sekarang mari kita amati elemen-elemen diagonal dari J4 seperti yang dirumuskan oleh (2.56) yaitu:
∑
=
− − +
− = ∂
∂ n
1 j
ij j i ij j ii
ii i i
i V Y V Y
V Q
) sin(
sinθ δ δ θ (2.56)
atau:
| | i
Ti ii i i i
V Q B V V
Q =− +
∂ ∂
(2.80)
Dengan menggunakan (2.72) dan (2.73) pada (2.80) akan diperoleh:
ii i
i B
V
Q ≈−
∂ ∂
(2.81)
Elemen-elemen luar diagonal dari J4 seperti yang dirumuskan oleh (2.57) yaitu:
i ik sin( i k ik) k
i V Y
V
Q = δ −δ −θ
∂ ∂
(2.57)
dapat diaproksimasi menjadi:
ik k
i B
V
Q ≈−
∂ ∂
(2.82)
Aproksimasi (2.82) diperoleh dengan menggunakan (2.72) dan (2.76) pada (2.57).
Dengan menggabungkan (2.81) dan (2.82) akan diperoleh:
'' |
|V B
Q
J =
∂ ∂ =
4 (2.83)
dimana B’’ merupakan matriks yang juga dibentuk dari matriks –B.
Dengan demikian, pada aliran daya fast decoupled, nilai-nilai koreksi untuk sudut fasa dan besar tegangan bus pada setiap iterasi dapat dihitung melalui:
Δδ(k) =−[B']−1P(k) (2.84a) Δ|V(k)|=−[B'']−1Q(k) (2.84b)
atau, secara lebih kompak:
⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ⎥ ⎦ ⎤ ⎢
⎣ ⎡ − = ⎥ ⎥ ⎦ ⎤ ⎢
⎢ ⎣ ⎡ Δ
δ
Δ −
) (
) (
) (
) (
'' ' |
| k
k 1
k k
Q P B 0
0 B
ANALISA SISTEM TENAGA Hal-41 Seperti yang telah diuraikan sebelumnya, kelebihan dari aliran daya fast decoupled adalah bahwa B’ dan B’’ merupakan matriks-matriks konstan, sehingga hanya perlu diinvers satu kali saja diawal perhitungan dan menggunakan hasil invers tersebut pada perhitungan-perhitungan untuk memperbaiki nilai estimasi pada setiap langkah iterasinya. Hal ini mengakibatkan waktu perhitungan per-iterasi dari fast decoupled akan jauh lebih singkat dibandingkan Newton-Raphson, dan memori komputer yang dipakai juga akan jauh lebih sedikit.
Namun demikian, aliran daya fast-decoupled akan memerlukan iterasi yang jumlahnya sedikit lebih banyak untuk mendapatkan solusi (atau konvergensinya lebih lambat). Konvergensi yang lebih baik akan diperoleh bila penyelesaian (2.84) dilakukan secara berurutan (sequential), artinya dapatkan dulu Δδ dan perbarui nilai estimasi untuk sudut tegangan melalui δbaru =δlama+Δδ. Kemudian, dengan menggunakan nilai δbaru tersebut hitung Δ|V| dan perbarui nilai estimasi untuk besar tegangan melalui
| | | | |
|Vbaru =Vlama +Δ V . Dengan penyelesaian secara berurutan, jumlah iterasi yang dibutuhkan untuk mendapatkan solusi akan lebih sedikit dibandingkan bila penyelesaiannya dilakukan secara simultan atau melalui (2.85). Gambar 2.9 memperlihatkan flowchart dari aliran daya fast decoupled.
Contoh Soal 2.4
Untuk sistem tenaga seperti pada Gambar 2.4, tentukan:
a. Vektor dari sudut/besar tegangan bus dan vektor dari selisih daya. b. Matriks B.
c. Matriks B’. d. Matriks B’’.
Jawab
a. Oleh karena bus 1 adalah bus slack dan bus 3 adalah bus PV, maka vektor dari
sudut/besar tegangan bus dan vektor dari selisih daya adalah:
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣ ⎡
= ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢
⎣ ⎡
⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢
⎣ ⎡
δ δ δ δ
= ⎥ ⎥ ⎥
⎦ ⎤
⎢ ⎢ ⎢
⎣ ⎡
5 4 2 5 4 3 2
5 4 2 5 4 3 2
Q Q Q P P P P
V V V
L L L
L
Q P
V
δ
;
| |
| |
| |
⎥
Maka matriks suseptansi:
⎥
Oleh karena bus 1 adalah bus slack, maka matriks B’:
ANALISA SISTEM TENAGA Hal-43 Gambar 2.9. Flowchart Dari Aliran Daya Fast Decoupled.
tidak tidak
ya ya tidak
ya
Tentukan nilai awal untuk besar dan sudut tegangan bus
Set hitungan iterasi k = 0, dan toleransi εP dan εQ
Bentuk matriks B’ dan B”
Set Kδ = 0 dan KV = 0
Hitung selisih daya-aktif P(k)
melalui (2.41a)
maks|P(k)|< εP Kδ = 1
KV = 0
Hitung Δδ(k) melalui (2.84a)
Hitung: δ(k+1) = δ(k) + Δδ(k) dan ganti δ(k) dengan δ(k+1)
KV= 1
tidak
ya Hitung selisih daya-reaktif Q(k)
melalui (2.41b)
maks|Q(k)|< ε KV = 1
Kδ = 0
Hitung ΔV(k) melalui (2.84b)
Hitung: V(k+1) = V(k) + ΔV(k)
dan ganti V(k) dengan V(k+1)
Kδ= 1
k = k + 1