BAB 2 LANDASAN TEORI 2.1. Garis Telapak Tangan - Pengenalan Garis Telapak Tangan Menggunakan Ekstraksi Fitur Operasi Blok Non-Overlapping Dan Pencocokan Jarak Euclidean Ternormalisasi
Teks penuh
Gambar
Dokumen terkait
Kode telapak tangan (palm code) adalah kode unik yang diperoleh melalui ekstraksi fitur telapak tangan seseorang yang dapat digunakan sebagai identitas pembeda
PENGENALAN CIRI GARIS TELAPAK TANGAN MENGGUNAKAN EKSTRAKSI FITUR GRAY LEVEL CO- OCCURENCE MATRIX (GLCM) DAN METODE K-NEAREST.. NEIGHBORS
adalah data yang digunakan adalah citra garis telapak tangan
Dari pengujian dan analisis yang dilakukan maka dapat diambil kesimpulan tingkat keberhasilan pengenalan citra telapak tangan dengan variasi jumlah citra latih pada
Pada tugas akhir ini akan dibuat sebuah sistem pengenalan telapak tangan mata dengan masukan citra telapak tangan menggunakan kamera kemudian diekstraksi ciri
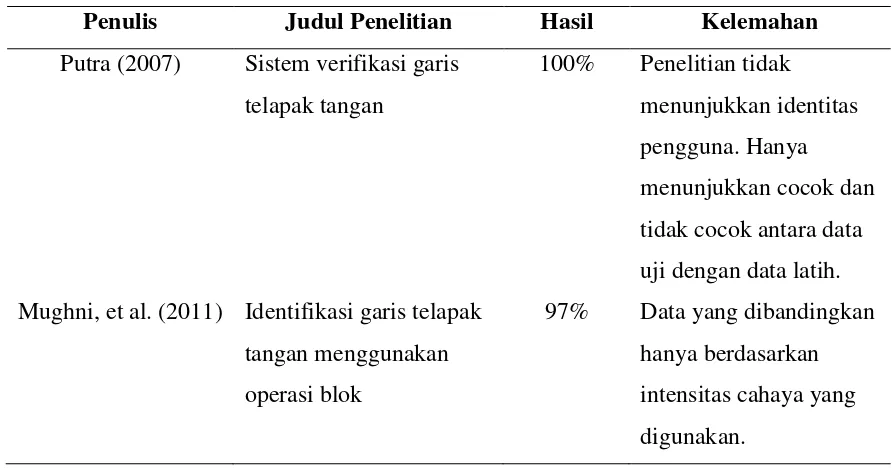
Sistem identifikasi garis-garis telapak tangan memiliki unjuk kerja yang tinggi, dengan tingkat keberhasilan pengenalan berkas telapak tangan yang diujikan adalah 100
Oleh karena itu, pada penelitian ini dirancang sebuah sistem pengenalan telapak tangan yang diekstraksi ciri menggunakan alihragam gelombang singkat Daubechies
Maka dari itu, pada Tugas Akhir ini dirancang sebuah sistem presensi telapak tangan dengan memanfaatkan webcam dalam pengambilan citra untuk kemudian diolah menggunakan
