1
INTEGRASI SISTEM SCADA WEB – DCS BERBASIS NETWORKING PLC DILENGKAPI SISTEM AUTO RECOVERY DAN AUTO REDUNDANT DENGAN
MENGGUNAKAN MULTIPLE COMMUNICATION DEVICES
Musthofa Fahmi1 dan Ryan Yudha Adhitya2
1,2. Prodi Teknik Otomasi, Jurusan Teknik Kelistrikan Kapal, Politeknik Perkapalan Negeri Surabaya, Sukolilo, 60111, Surabaya
Email : [email protected], [email protected]
Abstract: The problem that often occurs for
example a power outage and PLC reset was being a serious concern in the industrial sector, because it can directly lead to disruption of the production process. Nowdays several PLC (Omron) already has the ability to be integrated with other PLC. Form a networking PLC utilized with communication media (ethernet dan Controller Link Network). This network is possible to execute the Distributed Control Sistem (DCS) with the first PLC as Field Control Server (FCS) and another PLC as Field Control Unit (FCU) which is directly connected with the plantt. In the world of information technology (web development) there is a PHP MySQL database sistem that can be applied as an unlimited broad access SCADA Web. The existence of an integrated sistem between the DCS based on networking PLC (Omron) with SCADA Web using multiple communication devices, equipped with auto-recovery function and auto switching job sistem can be used as innovations and solutions to the problems of industrial control sistems that provide convenience to its users.
Keywords: DCS, SCADA Web, Networking
PLC, Auto recovery, Switching job
1. Pendahuluan
Seiring dengan perkembangan industri yang terus tumbuh besar melahirkan sebuah sistem kontrol plant industri yang semakin kompleks. Sistem kontrol terdistribusi yang memiliki fasilitas monitoring, controlling dan akuisisi data secara realtime dan dapat dilakukan dengan tanpa keterbatasan jarak menjadi salah satu solusi bagi kompleksitas sistem yang terus meningkat dan solusi bagi tuntutan peningkatan nilai efektifitas dan efisiensi sistem kontrol industri.
Dalam sistem kontrol dikenal dua sistem kontrol yang menangani plantt industri yang tergolong memiliki kompleksitas tinggi :
1. DCS ( Distributed Control Sistem ) Sistem kontrol terdistribusi dikenal dengan istilah DCS ( Distributed Control Sistem ) adalah sebuah sistem kontrol yang mampu mendistribusikan kontrol manajemen ke tiap bagian - bagian sistem kontrol yang terintegrasi dalam sistem DCS, memiliki FCS ( Field Control Server ) yang bertugas sebagai main server dan memiliki beberapa FCU ( Field Control Unit ) sebagai controller yang berhubungan langsung dengan field devices. DCS sangat unggul dalam sistem kontrol proses, namun masih lemah dalam hal monitoring dan akuisisi data secara realtime.
2. SCADA ( Supervisory Control And Data Acquisition )
SCADA adalah sebuah sistem kontrol yang memiliki keunggulan dalam hal monitoring dan akuisisi data secara realtime, walaupun SCADA juga memiliki fungsi kontrol, namun masih lemah dalam hal kontrol proses. SCADA dapat berupa sistem offline dan online (Web).
Untuk mendapatkan suatu solusi dari tuntutan plant industri yang terus berkembang diperlukan gabungan kedua sistem kontrol di atas (DCS dan SCADA) agar tebentuk suatu sistem kontrol yang handal. Hal ini tentunya membutuhkan biaya yang cukup besar dilihat dari harga perangkat DCS dan SCADA yang beredar di pasaran, belum ditambah riset untuk mengintegrasikan kedua sistem tersebut yang tentunya berbeda merk dan berbeda vendor.
2
Proceeding Seminar Nasional Pendidikan Teknik Elektro, Sept 2013
dengan biaya yang relatif lebih ekonomis. Seiring dengan perkembangan teknologi ICT (Information and Communication Technology) dikenal sebuah sistem database PHP MySQL yang saat ini dapat diaplikasikan dengan menggunakan bantuan background software interface (Visual Basic) untuk akses serial ke dalam memori PLC, sehingga dapat dijadikan solusi alternatif bagi sistem SCADA Web.
Pemadaman listrik pada area industri (secara penuh maupun sebagian) dan kendala ketika PLC reset menyebabkan terganggunya proses produksi, di lain sisi keseluruhan proses harus tetap berjalan dikarenakan besarnya kerugian yang harus ditanggung apabila proses produksi tertunda. Solusi untuk mengantisipasi hal tersebut adalah dengan aplikasi auto recovery dan switching job pada sistem terdistribusi, maksud daripada kedua aplikasi tersebut adalah sebagai berikut :
1. Auto recovery : merupakan proses pembacaan data memori secara realtime dengan kemampuan untuk menyimpan atau recover data secara otomatis.
2. Switching job : proses yang bekerja pada dua atau lebih controller device (PLC) dalam satu plant yang sama dengan satu controller device bertindak sebagai kontroler utama yang mengendalikan plant dan kontroler yang lain berfungsi sebagai back up controller apabila terjadi gangguan pada kontroler utama.
Objek yang dikontrol adalah kecepatan motor AC 3 phase dan water tank level sistem. Motor berperan dalam berbagai aplikasi (semisal sebagai pompa, penggerak konveyor dan mixer) sedangkan penerapan water tank level sistem sering digunakan untuk mengetahui ketinggian zat cair pada suatu ruang atau media. Khusus untuk sistem kontrol motor pada PLC dibutuhkan modul tambahan yaitu inverter motor, modul ini berfungsi untuk mengubah tegangan referensi menjadi frekuensi (sinyal kotak) yang akan mengatur besarnya sumber tegangan yang masuk untuk menggerakkan motor.
Dari beberapa hal diatas menjadi landasan untuk merancang sebuah sistem terintegrasi antara DCS berbasis networking PLC Omron (berbagai macam tipe) dengan SCADA Web menggunakan multiple device communication dilengkapi dengan fungsi auto recovery sistem dan auto switching job
sistem, dimana proses akuisisi data dapat diakses secara mobile. Dengan harapan, sistem terintegrasi ini dapat dijadikan inovasi terhadap perkembangan sistem kontrol industri yang memberikan kemudahan kepada penggunanya.
2. Perancangan sistem
Sistem yang dibangun dan dirancang adalah integrasi sistem dari DCS berbasis networking PLC dengan SCADA Web berbasis PHP MySQL dengan penerapan proses auto recovery dan auto redundant. Akses utama atau core sistem terletak dalam PLC CS1G CPU42H sebagai server dari keseluruhan sistem terintegrasi. Dalam rancangan prototype DCS digunakan PLC yang berbeda tipe dan berbeda media komunikasi agar lebih leluasa ketika digunakan dalam praktek langsung di industri yang tentunya dalam plant industri besar memiliki bermacam - macam PLC yang berbeda tipe dan berbeda pula media komunikasinya, dilengkapi juga dengan sistem auto recovery and auto redundant(switching job) sistem ketika salah satu PLC FCU down akan secara otomatis terdeteksi oleh PLC server (FCS) dan segera akan dibackup oleh PLC FCU yang lain dalam melanjutkan proses kontrol plant (tanpa mengulang dari awal), PLC server bertindak sebagai main server dalam pendistribusian kerja dan sistem manajemen kontrol dalam sistem DCS. sedangkan dalam sistem SCADA Web, PC server SCADA juga merupakan client dari PLC CS1G CPU42H dikarenakan seluruh data yang didapat diambil dari PLC server (CS1G CPU42H ), read dan write memori PLC server dari PC dan interfacing data dari dan menuju PLC maupun sebaliknya ke dalam database PHP MySQL digunakan background software interface melalui Visual Basic yang selanjutnya dari database PHP MySQL ditampilkan melalui halaman Web (Interfacing Web) dengan bahasa pemrograman PHP HTML dan dapat diakses secara luas oleh client yang terhubung kedalam jaringan (internet) dilengkapi pula dengan sistem recording and reporting data untuk memudahkan dalam analisa dan pemrosesan data sistem.
Musthofa Fahmi & Ryan Yudha Adhitya, Integrasi SCADA web - DCS ….
3
Jaringan ini terdiri dari tiga buah PLC dengan tipe yang berbeda dan berbeda pula media komunikasinya dan satu buah PC. Satu PLC dan PC masing-masing adalah satu node sehingga didalam rancangan sistem diatas terdapat empat node yang tergabung dalam satu jaringan dan ditambah dengan satu plant kontrol tersendiri yang terhubung dengan masing - masing PLC client (FCU).
Berikut adalah gambaran keseluruhan perencanaan dan perancangan keseluruhan sistem integrasi DCS dan SCADA web berbasis networking PLC :
Gambar 2 Sistem overview
Untuk menguji sistem integrasi DCS-SCADA dibuat dua buah rancangan plant sebagai berikut :
2.1 Plant 1
Berupa control motor 3 phase dengan inverter dan rotary encoder. Jenis motor yang digunakan dalam tugas akhir ini adalah motor induksi 3 phase. Motor induksi memiliki konstruksi yang sangat kuat dan karakteristik kerja yang baik serta jenis motor ac yang paling banyak digunakan, dengan konstruksi yang sederhana terdiri dari stator merupakan bagian yang diam dan rotor sebagai bagian yang berputar.
Dalam motor induksi, tidak ada hubungan listrik ke rotor, arus rotor merupakan arus induksi. Tetapi ada
kondisi yang sama separti dalam motor dc, yaitu konduktor rotor mengalirkan arus dalam medan magnetik sehingga terjadi gaya padanya yang berusaha menggerakkannya dalam arah tegak lurus medan. Jika lilitan stator diberi energi dari catu tiga fase, dibangkitkan medan magnetik putar yang berputar pada kepesatan sinkron. Ketika medan melewati medan konduktor rotor, dalam konduktor ini diinduksikan ggl yang sama seperti ggl yang diinduksikan dalam lilitan sekunder transformator oleh fluksi arus primer. Rangkaian rotor adalah lengkap, baik melalui cincin ujung atau tahanan luar, ggl induksi menyebabkan arus mengalir dalam konduktor rotor. Jadi konduktor rotor yang mengalirkan arus dalam medan stator mempunyai gaya yang bekerja padanya.
Gambar 1.1 Skema rangkaian sistem kontrol motor
4
Proceeding Seminar Nasional Pendidikan Teknik Elektro, Sept 2013
Gambar 1.2 Water tank level sistem
Sistem ini menggunakan dua feed water tank sebagai media utama, dua buah main pump sebagai aktuator dan sensor floating switch untuk mengetahui ketinggian zat cair.
Dan berikut adalah rincian dan penjelasan dari setiap bagian integrasi dalam sistem DCS - SCADA :
DCS based on networking PLC
2.3 PLC CS1G CPU42H
Bertindak sebagai server yang memiliki fungsi dan hak untuk memonitor (read data) dan fungsi pengendalian (write data) dari dan menuju PLC client. Terhubung kedalam dua media komunikasi ethernet dan controller link network untuk akses komunikasi dengan PLC lain dan media komunikasi serial yang terhubung dengan PC Server SCADA. PLC server menjadi main sistem dalam pendistribusian dan management sistem control (DCS) yang dalam hal ini adalah sistem auto recovery and auto redundant (switching job) sistem.
2.4 CJ1M ETN CPU11 dengan CS1G CPU42H
PLC ini terhubung dengan jaringan terintegrasi melalui media komunikasi ethernet dan berfungsi sebagai PLC client (FCU) yang langsung terhubung dengan plant yang dikontrol. Berikut
adalah gambar dari bagian komunikasi PLC CS1G CPU42H dengan CJ1M ETN CPU11 melalui media ethernet.
\
Gambar 2.4 Komunikasi CS1G CPU42H – CJ1M ETN CPU11
2.5 CJ1M CPU21 dengan CS1G CPU42H
PLC ini terhubung dengan jaringan terintegrasi melalui media komunikasi Controller Link Network dan berfungsi sebagai PLC client (FCU) yang langsung terhubung dengan plant yang dikontrol Berikut adalah gambar dari bagian komunikasi antara CS1G CPU42H dan PLC CJ1M.
Gambar 2.5 Komunikasi PLC CJ1M CPU21 dengan CS1G
2.6 PC server SCADA dengan CS1G CPU42H
PC server SCADA terhubung dengan jaringan terintegrasi melalui media serial yang langsung terhubung ke main server ( PLC CS1G CPU42H ) dan memiliki fungsi untuk dapat melakukan instruksi read and write data dari dan menuju PLC client yang selanjutnya dari PC server SCADA ini langsung terhubung dengan jaringan internet / web. Mekanisme komunikasi PC dengan PLC CS1G CPU42H dilakukan dengan media komunikasi serial yang terhubung pada USB serial port PC ke serial port RS232 CPU CS1G CPU42H.
Gambar 2.6 Komunikasi PLC
CJ1M ETN CS1G
Musthofa Fahmi & Ryan Yudha Adhitya, Integrasi SCADA web - DCS ….
5
CS1G CPU42H dengan PC 3. Pengujian Sistem
Pengujian dan pengambilan data dibagi menjadi tiga bagian yaitu Pengujian jaringan komunikasi Ethernet antar PLC, Pengujian jaringan komunikasi controller link network antar PLC, pengujian auto recover dan switching job plant 1, pengujian autorecover dan switching job plant 2, pengujian interface PLC ke PC via Visual Basic, dan pengujian scada web. Pada start up pertama kali sebelum kontaktor satu phase diaktifkan, semua PLC dalam keadaan mati dan default setting pada semua memori D memiliki nilai yang sama ( 0000 hex ). Setelah kontaktor satu phase diaktifkan, semua plc dalam keadaan stand by. Aktivasi PLC 1 dan PLC 2 menunggu perintah dari server, pada server dapat ditentukan kondisi PLC 1 dan 2 ( start PLC 1, start PLC 2, start all, off PLC 1, off PLC 2, dan off all ).
Gambar 3.a ( Fungsi aktifasi pada ladder diagram )
Gambar 3.b ( Kondisi PLC stand by )
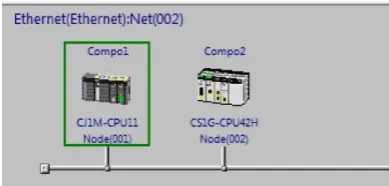
3.1 Pengujian Jaringan Komunikasi Ethernet antar PLC
PLC yang tergabung pada media Ethernet adalah PLC CJ1M ETN CPU11 (FCU plant 2) dan PLC CS1GH (FCS/Server). Kedua PLC ini tergabung pada jaringan dengan media Ethernet dan melakukan perpindahan memori pada data memori area PLC CJ1M ETN CPU11 yang berisi status kontrol factory automation module ke area data memori PLC CS1GH.
Berikut ini adalah pengujian apakah sistem tersebut telah benar-benar tersambung dengan media Ethernet atau tidak. Pengujian dilakukan dengan software CX- Integrator seperti gambar berikut ini
Gambar 3.1 Jaringan Ethernet
Pada gambar dapat diihat bahwa PLC yang terdeteksi tergabung pada jaringan adalah PLC CS1G – CPU42H hal tersebut menunjukan bahwa koneksi kedua PLC tersebut telah benar terkoneksi secara hardware dan juga telah dilakukan pengaturan node dan nomor jaringan dengan benar. Untuk memastikan koneksi tersebut dapat dilakukan ping test kedua PLC tersebut. Selain pengujian ping tes, dilakukan juga pengujian echo back test dengan bantuan CX-Programmer. Pengujian dilakukan saat PLC CJ1M dan CS1GH juga melakukan mekanisme SEND dan RECV atau mekanisme pertukaran memori area.
Hasilnya didapatkan bahwa dalam 100 kali pengiriman data keberhasilan pengiriman data sebanyak 87 kali. Sedangkan kegagalan pengiriman data sebanyak 13 kali. Kegagalan pengiriman data memiliki arti bahwa pada proses pengiriman data dengan panjang 128 dan berikan waktu tunggu respon maksimal adalah 1 detik, sehingga jika waktu respon pengiriman data melebihi 1 detik dianggap pengiriman data gagal. Sehingga 13 kali kegagalan pengiriman data adalah waktu respon yang melebihi dari yang ditargetkan 1 detik. Apabila diamati waktu respon yang tercatat adalah respon waktu maksimal adalah 1000 ms sesuai dengan batasan yang diberikan. Waktu tercepat pengiriman data adalah 185 ms. Rata-rata waktu yang dibutuhkan dalam pengiriman data adalah 296 ms.
3.2 Pengujian Jaringan Komunikasi Controller Link antar PLC
6
Proceeding Seminar Nasional Pendidikan Teknik Elektro, Sept 2013
jaringan dengan media tersebut telah terkoneksi dengan benar baik secara hardware dan secara software. Berikut ini adalah Pengujian jaringan Controller Link dengan CX-Programmer.
Hasil Pengujian dengan CX-Integrator menunjukan bahwa jaringan Controller Link telah terhubung secara hardware serta juga telah dilakukan konfigurasi node dan jaringan. Pengujian selanjutnya adalah pengujian echo back test yang prinsipnya hampir sama dengan pengujian echo back test pada media Ethernet. Berikut ini adalah pengujian Echo back test. Hasil dari pengujian dapat terlihat bahwa pada pengiriman data dengan panjang 128 dikirimkan 100 kali pengiriman didapatkan tingkat keberhasilan 100% dengan waktu respon paling lama diset 1 detik didapatkan hasil. Respon pengiriman waktu paling lambat adalah 248 ms dan paling cepat adalah 197 ms dengan waktu rata-rata adalah sebesar 209 ms.
3.3 Pengujian Plant 1 ( Motor 3 phase )
Pada sistem ini operator dapat memasukkan 6 input speed dengan maksimum speed motor adalah 1437 rpm. Masing – masing input speed tersebut akan dieksekusi selama 10 detik, setelah waktu berakhir maka secara otomatis speed motor akan berubah sesuai urutan. Proses barjalan secara looping ( berulang ) selama PLC server aktif. Untuk pengujian autorecovery dan switching job sistem dilakukan dengan jalan memutus / hubungkan kabel CLK.. Sebelumnya telah diinputkan speed motor, dengan keterangan : Speed 1 : 1000 rpm; Speed 2 : 900 rpm; Speed 3 : 800 rpm; Speed 4 : 700 rpm; Speed 5 : 600 rpm; Speed 6 : 500 rpm.
Saat operator mengaktifkan program maka PLC1 memiliki hak penuh untuk mengontrol dan memonitor motor 3 phase, dimulai dari speed 1 bergeser secara periodik hingga speed 6 dan kembali mengeksekusi speed 1.
Gambar 3.3.a ( Pemutusan koneksi CLK dan kondisi plc 1 sebelum dan sesudah
back up )
Ketika koneksi clk diputus, secara otomatis PLC1 nonaktif dan motor berhenti. PLC server membaca nilai memori bit terakhir pada PLC1, waktu toleransi diberikan untuk mengindikasi bahwa komunikasi dengan PLC1 benar – benar terputus.
Gambar 3.3.b ( Pembacaan memori shift register )
Dicontohkan pada gambar 4.1.e koneksi CLK diputus pada saat speed ke – 4 sedang dieksekusi (memori CIO 525 bit ke – 3). Nilai hexadesimal yang terakhir (000F) terbaca oleh PLC Server dan dialihkan ke PLC 2 sebagai PLC back up. Setelah waktu toleransi berakhir maka PLC 2 aktif dan melanjutkan eksekusi speed ke – 4 berlanjut speed 5 dan seterusnya. Pada saat kabel CLK dihubungkan kembali maka seketika PLC 1 akan mengambil alih plant 1 tanpa waktu toleransi. Sistem kontrol motor yang digunakan adalan sistem open loop, keberadaan encoder sebatas untuk melakukan fungsi monitor kecepatan motor secara real time.
3.4 Pengujian Plant 2 ( feed water tank )
Sama halnya dengan sistem kontrol motor, untuk pengujian auto switch dan auto recover dilakukan dengan jalan memutus – hubungkan kabel komunikasi yang dipakai ( ethernet cable disconnection ).
Musthofa Fahmi & Ryan Yudha Adhitya, Integrasi SCADA web - DCS ….
7
Gambar 3.4 ( Pemutusan kabel ethernet dan kondisi plc 2 sebelum dan sesudah back up )
Setelah waktu toleransi berakhir maka PLC 1 bertugas mengambil alih akses dan kontrol feed water tank. Apabila kabel ethernet terhubung maka seketika plant 2 diakuisisi kembali oleh PLC 2.
3.5 Pengujian software interface - PLC
Pengujian dilakukan untuk mengetahui apakah perintah c – commands dapat direspon oleh PLC, untuk pengujian koneksi visual basic – PLC menggunakan header code RR, Header code RR berfungsi untuk membaca isi data yang terdapat pada alamat word CIO.
Pada text command response kita dapati
karakter “@00RR00000040*” (output coil off) dan “@00RR00000141*” (output coil
on)
Unit no = 00 Header code = RR
End code = 00 (normal completion)
Read data = 0000 (indikator output coil off) / 0001 (indikator output coil on)
FCS = 40 / 41 Terminator = *
End code bernilai “00” PLC merespon
sesuai dengan format, proses read data berhasil.
3.6 Pengujian SCADA - Web
Keseluruhan proses sistem kontrol terdistribusi ditampilkan pada halaman web. Menggunakan bahasa pemrograman php ( codeigniter ) yang terhubung dengan database MySQL. Pengujian dilakukan dengan jalan menekan push button dan memasukkan variable ke dalam textbox yang ada pada halaman html dan melakukan verifikasi pada database MySQL.
Gambar 3.6.a ( pengujian SCADAweb )
Untuk memastikan apakah variable yang telah kita inputkan sesuai maka dilakukan monitoring pada database MySQL.
Gambar 3.6.b ( verifikasi database)
Pengujian akses PC Client ke PC Server SCADA Web dilakukan dengan ping IP PC Server melalui PC Client menggunakan CMD.exe dalam sistem32 windows
Gambar 3.6 c Ping test PC Client – PC Server SCADA Web
8
Proceeding Seminar Nasional Pendidikan Teknik Elektro, Sept 2013
diterima 4 kali, diperoleh respon transfer data sukses 100%, Lost data 0% dengan waktu respon tercepat 3ms dan terlama 7ms.
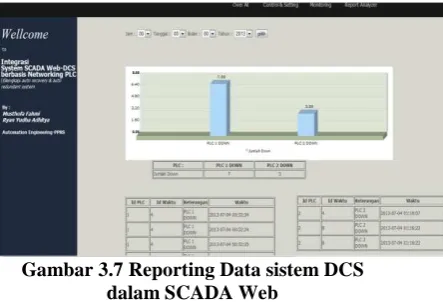
3.7 Pengujian sistem reporting
Dalam hal ini dilakukan reporting terhadap sistem DCS, PLC Down dan Backup sehingga diperoleh reporting data dan analisa perbandingan untuk ketahanan masing-masing PLC(FCU). Pengujian dilakukan dengan memutus koneksi (mematikan PLC FCU) PLC 1 sebanyak 7 kali dan PLC 2 sebanyak 3 kali dengan waktu yang berbeda-beda dilanjutkan memantau hasil reporting dan pengolahan data dalam sistem SCADA web yang diolah dalam bentuk data grafik dan table.
Gambar 3.7 Reporting Data sistem DCS dalam SCADA Web
Dari pengujian diatas diperoleh grafik representasi dari data dalam table, data status tiap PLC tersimpan lengkap beserta tanggal, bulan, tahun, jam, menit dan detik secara detail.
Kesimpulan :
1. Integrasi PLC pada media Ethernet memiliki network address 2 dengan pengiriman data 128 bytes memiliki tingkat keberhasilan pengiriman data sebesar 87%. Dengan 100 kali pengiriman data, data diterima 87 kali dan gagal diterima 13 kali dengan waktu respon tercepat sebesar 185 ms dan waktu pengiriman terlama 1 s dengan waktu rata-rata pengiriman sebesar 296 ms.
2. Integrasi PLC pada media Controller Link Network memiliki tingkat keberhasilan pengiriman data sebesar 100% dengan total pengiriman data 100 kali dengan panjang data 128 Bytes didapatkan 100 kali data di terima. Total waktu pengiriman paling cepat adalah 197 ms dan waktu pengiriman terlama adalah sebesar 248 ms pada setiap 1 kali pengiriman data. 3. Sistem Auto recovery dan auto redundant
(auto switching job sistem) dalam sistem DCS PLC memiliki tingkat keberhasilan
100 % dengan penyesuaian kecepatan delay pada masing-masing clock PLC yang terintegrasi dalam sistem DCS.
4. Integrasi seluruh s i s t e m D C S PLC dengan PC Server memiliki tingkat keberhasilan remote sistem sebesar 100% dengan respon secara real time.
5. Integrasi seluruh PLC, s i s t e m DCS PLC dan S C A D A W e b memiliki tingkat keberhasilan pengiriman data sebesar 100% dengan kepadatan lalu lintas data antar PLC s e r v e r dan PC server secara polling dengan pengiriman data setiap 300 ms dan kepadatan pengiriman data antar PLC dalam sistem DCS memiliki tingkat kepadatan pengiriman data tiap 200 ms.
6. Sistem SCADA Web berbasis PHP MySQL sebagai representasi monitoring realtime dari kondisi sistem DCS dan kondisi plant control memiliki tingkat keberhasilan 100% dengan kecepatan respon selisih data sebesar 0,5-1,5 detik yang dipengaruhi oleh kecepatan processor PC Server dan jumlah memori PLC yang dibaca ( besar data dan lalulintas data ).
7. Sistem recording dan reporting data dalam sistem SCADA web terhadap kondisi sistem DCS ( auto recovery and auto redundant ) memiliki tingkat keberhasilan 100% dengan selisih waktu record data dengan realtime kondisi selama 0.8-1,5 detik yang dipengaruhi oleh kecepatan processor PC Server.
8. Kehandalan dan kecepatan sistem integrasi sangat dipengaruhi oleh spesifikasi dari masing-masing hardware dalam sistem integrasi.
Daftar Pustaka
Ali, Muhammad. Modul kuliah sistem kendali terdistribusi konsep dasar sistem kendali terdistribusi. Yogyakarta. UNY. 2012
Ghozzali, kurniawan. Perancangan komunikasi data terintegrasi pada programmable logic controller melalui media controller link network dan Ethernet device. Surabaya, PENS, 2011
Lesmana, meirudy. Pembuatan program scada berbasis web internet untuk PLC omron cpm1. Surabaya, UK PETRA, 2006