ABSTRAK
iv
Universitas Kristen MaranathaABSTRAK
PT. Stallion adalah perusahaan yang membuat komponen-komponen
untuk mobil dan motor. Komponen-komponen yang diproduksinya adalah
komponen-komponen untuk perusahaan-perusahaan terkemuka, seperti Suzuki,
Showa, dan Astra. PT. Stallion ini membagi proses pembuatan komponennya
menjadi 3 departemen, yaitu departemen pipa frame head ( Suzuki), Brake pedal (
Suzuki), dan departemen Multi part ( Showa dan Astra). Dengan pembagian
departemen tersebut, tata letak yang digunakan oleh perusahaan hampir mirip
dengan
Layout By Group Technology
. Perusahaan menempatkan mesin
berdasarkan prinsip feng shui sehingga ada mesin yang seharusnya berdekatan,
diletakkan berjauhan dan sebaliknya. Hal ini mengakibatkan aliran material
menjadi kurang teratur, jarak
material handling
menjadi lebih jauh, meningkatnya
ongkos material handling, dan produktivitas pekerja menurun.
Untuk mengatasi permasalahan tersebut, penulis mencoba mengusulkan
dengan menggunakan metode
Group technology.
Langkah awal pengerjaan
Group
Technology
adalah penyusunan matriks awal mesin dan komponen
.
Setelah
penyusunan awal dilakukan pengolahan dengan metode
Direct Cluster
Algorithm(DCA).
Setelah dapat hasil
DCA
maka dilakukan pemeriksaan apakah
ada
exceptional part
. Jika ada
exceptional part
maka dilakukan
treatment
penduplikasian mesin. Setelah itu dilakukan perhitungan performansi dengan
metode
CI
, kemudian menghitung frekuensi dan menentukan jumlah mesin yang
diperlukan, Setelah itu dilakukan perhitungan tata letak mesin dan menyusun tata
letak yang baru.
Dengan metode
Group technology
ini
didapat tata letak usulan dengan
jumlah sel sebanyak 5 dan terdapat inter sel untuk mesin P 16. Mesin-mesin yang
digunakan di sel 1 adalah: mesin P 16, P40, P 63, P 20,
Trimming, Buffing
,
Double bouring
, dengan
part
yang dibuat adalah
cap vitara, case rr upper, Under
lama, Upper lama, Dust cover end,
dan
Dust cover rr
. Mesin yang digunakan di
sel 2 adalah mesin P10, P25, P40, P63,
Hidrolik
, dan
part
yang dibuatnya adalah
Cap keha, Brake shoe xc, Brake shoe xb, Rod a, Plate number, Washer plate, Rod
c
. Mesin yang digunakan di sel 3 adalah mesin P10, P 25, P 63, P 150, P 100,
Daftar Isi
vii
Universitas Kristen Maranatha
DAFTAR ISI
LEMBAR PERNYATAAN HASIL KARYA PRIBADI
... iii
ABSTRAK
... iv
KATA PENGANTAR DAN UCAPAN TERIMA KASIH
... v
DAFTAR ISI
... vii
DAFTAR TABEL
... x
DAFTAR GAMBAR
... xiv
DAFTAR LAMPIRAN
... xvi
BAB 1 PENDAHULUAN
... 1 - 1
1.1.
Latar Belakang Masalah ... 1 - 1
1.2.
Identifikasi Masalah ... 1 - 2
1.3.
Pembatasan Masalah dan Asumsi... 1 - 2
1.4.
Perumusan Masalah ... 1 - 2
1.5.
Tujuan Penelitian ... 1 - 3
1.6.
Sistematika Penulisan ... 1 - 3
Daftar Isi
Universitas Kristen Maranatha
2.3.3 Permasalahan Dalam Penerapan
Group Technology
... 2 - 8
2.3.4 Metode dasar
Group Technology
... 2 – 9
2.3.5 Keterbatasan dan Kelebihan
Group Technology
... 2 - 11
2.3.6 Karakteristik Metode-metode
Group Technology
... 2 - 12
2.4 Ukuran Jarak ... 2 - 31
2.4.1 Euclidean
... 2 - 32
2.4.2 Squared Euclidean
... 2 - 32
2.4.3 Rectilinear
... 2 - 33
2.4.4 Tchebychev
... 2 - 33
2.4.5 Aisle Distance
... 2 - 33
2.4.6 Adjacency
... 2 - 34
2.4.7Shortest Path
... 2 - 34
2.5
Cell Index
(CI) ... 2 –34
BAB 3 METODOLOGI PENELITIAN
... 3 - 1
BAB 4 PENGUMPULAN DATA
... 4 - 1
4.1.
Sejarah Singkat PT. Stallion ... 4 - 1
4.2.
Struktur Organisasi dan Uraian Jabatan ... 4 - 2
4.3.
Produk perusahaan ... 4 - 4
4.4.
Jenis Mesin ... 4 - 5
4.5.
Peta Proses Operasi ... 4 - 11
4.6.
Kapasitas Produksi... 4 - 26
4.7.
Departemen Produksi ... . 4 - 26
4.8.
Layout Awal Perusahaan ... 4- 28
BAB 5 PENGOLAHAN DATA DAN ANALISIS
... 5 - 1
5.1.
Pengolahan Data ... 5 – 1
Daftar Isi
Universitas Kristen Maranatha
5.1.3 Perhitungan Performansi Tata Letak ... 5 - 14
5.1.4 Perhitungan Frekuensi Perpindahan ... 5 - 17
5.1.5 Perbandingan Frekuensi berdasarkan berat dan Volume 5 - 30
5.1.6 Perhitungan OMH Tata Letak Awal ... 5 - 32
5.1.7 Perhitungan
Routing Sheet
... 5 - 35
5.1.8 Perhitungan Kebutuhan Mesin untuk Tiap sel ... 5 - 46
5.1.9 Perhitungan Tata Letak Mesin ... 5 - 52
5.1.10 Jarak yang Terpilih untuk Tata Letak Usulan ... 5 - 63
5.1.11 Perhitungan OMH Tata Letak Usulan ... 5 - 66
5.1.12 Layout Usulan dan Aliran Material ... 5 - 70
5.1.13 Perhitungan Penghematan Waktu
Transport
... 5 - 74
5.2.
Analisis ... 5 - 75
5.2.1.
Analisis Tata Letak Awal ... 5 - 75
5.2.2.
Aliran Tata Letak Usulan ... 5 - 76
5.2.3.
Analisis Perbandingan ... 5 - 78
BAB 6 KESIMPULAN DAN SARAN
... 6 - 1
6.1.
Kesimpulan ... 6 - 1
6.2.
Saran ... 6 - 4
Daftar Gambar
xiv
Universitas Kristen MaranathaDAFTAR TABEL
Tabel
Judul
Halaman
4.1
Jenis komponen
4-4
4.2
Jenis mesin
4-5
4.3
Kapasitas Produksi
4-26
4.4
Komponen pada tiap Departemen
4-27
5.1
Matriks awal mesin – komponen
5-3
5.2
Matriks awal mesin-komponen
5-4
5.3
Matriks akhir baris
5-5
5.4
Matriks akhir kolom
5-6
5.5
Matriks akhir DCA
5-7
5.6
Duplikasi Mesin alternatif 1
5-8
5.7
Duplikasi Mesin alternatif 2
5-9
5.8
Duplikasi Mesin alternatif 3
5-10
5.9
Duplikasi Mesin alternatif 4
5-11
5.10
Duplikasi Mesin alternatif 5
5-12
5.11
Duplikasi Mesin alternatif 6
5-13
5.12
Perhitungan CI
5-14
5.13
Prosentase Scrap untuk Volume
5-18
5.14
Prosentase Scrap untuk Berat
5-21
5.15
Frekuensi berdasarkan berat
5-24
5.16
Frekuensi berdasarkan Volume
5-27
5.17
Perbandingan Frekuensi berdasarkan berat dan volume
5 - 30
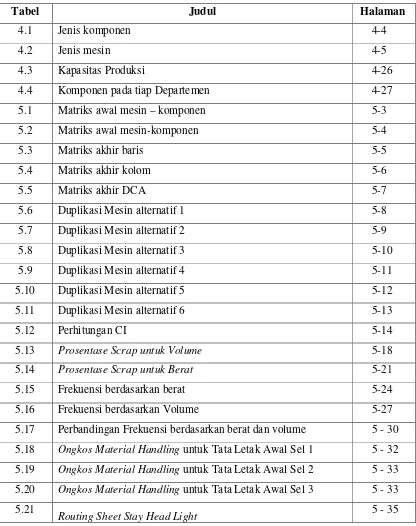
5.18
Ongkos Material Handling
untuk Tata Letak Awal Sel 1
5 - 32
5.19
Ongkos Material Handling
untuk Tata Letak Awal Sel 2
5 - 33
5.20
Ongkos Material Handling
untuk Tata Letak Awal Sel 3
5 - 33
5.21
[image:5.612.113.529.151.677.2]Daftar Gambar
xiv
Universitas Kristen MaranathaTabel
Judul
Halaman
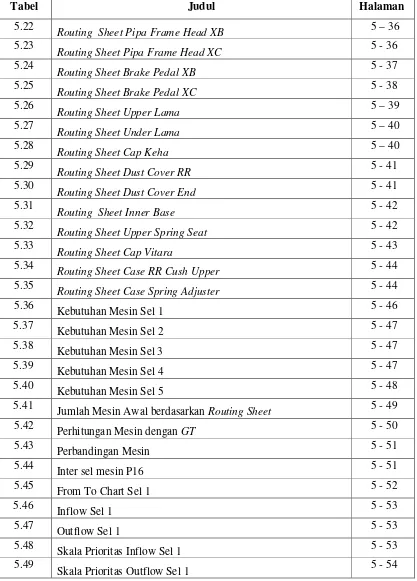
5.22
Routing Sheet Pipa Frame Head XB
5 – 36
5.23
Routing Sheet Pipa Frame Head XC
5 - 36
5.24
Routing Sheet Brake Pedal XB
5 - 37
5.25
Routing Sheet Brake Pedal XC
5 - 38
5.26
Routing Sheet Upper Lama
5 – 39
5.27
Routing Sheet Under Lama
5 – 40
5.28
Routing Sheet Cap Keha
5 – 40
5.29
Routing Sheet Dust Cover RR
5 - 41
5.30
Routing Sheet Dust Cover End
5 - 41
5.31
Routing Sheet Inner Base
5 - 42
5.32
Routing Sheet Upper Spring Seat
5 - 42
5.33
Routing Sheet Cap Vitara
5 - 43
5.34
Routing Sheet Case RR Cush Upper
5 - 44
5.35
Routing Sheet Case Spring Adjuster
5 - 44
5.36
Kebutuhan Mesin Sel 1
5 - 46
5.37
Kebutuhan Mesin Sel 2
5 - 47
5.38
Kebutuhan Mesin Sel 3
5 - 47
5.39
Kebutuhan Mesin Sel 4
5 - 47
5.40
Kebutuhan Mesin Sel 5
5 - 48
5.41
Jumlah Mesin Awal berdasarkan
Routing Sheet
5 - 49
5.42
Perhitungan Mesin dengan
GT
5 - 50
5.43
Perbandingan Mesin
5 - 51
5.44
Inter sel mesin P16
5 - 51
5.45
From To Chart Sel 1
5 - 52
5.46
Inflow Sel 1
5 - 53
5.47
Outflow Sel 1
5 - 53
5.48
Skala Prioritas Inflow Sel 1
5 - 53
5.49
[image:6.612.114.531.108.689.2]Daftar Gambar
xiv
Universitas Kristen MaranathaTabel
Judul
Halaman
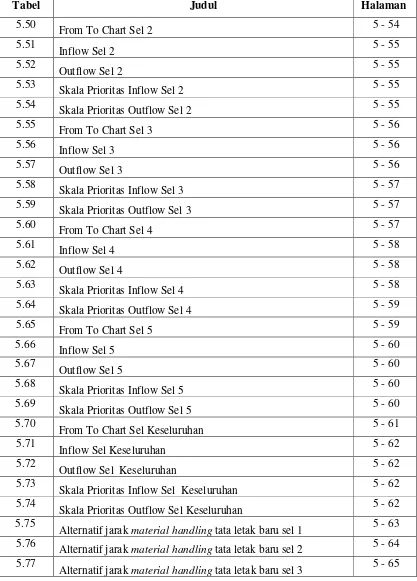
5.50
From To Chart Sel 2
5 - 54
5.51
Inflow Sel 2
5 - 55
5.52
Outflow Sel 2
5 - 55
5.53
Skala Prioritas Inflow Sel 2
5 - 55
5.54
Skala Prioritas Outflow Sel 2
5 - 55
5.55
From To Chart Sel 3
5 - 56
5.56
Inflow Sel 3
5 - 56
5.57
Outflow Sel 3
5 - 56
5.58
Skala Prioritas Inflow Sel 3
5 - 57
5.59
Skala Prioritas Outflow Sel 3
5 - 57
5.60
From To Chart Sel 4
5 - 57
5.61
Inflow Sel 4
5 - 58
5.62
Outflow Sel 4
5 - 58
5.63
Skala Prioritas Inflow Sel 4
5 - 58
5.64
Skala Prioritas Outflow Sel 4
5 - 59
5.65
From To Chart Sel 5
5 - 59
5.66
Inflow Sel 5
5 - 60
5.67
Outflow Sel 5
5 - 60
5.68
Skala Prioritas Inflow Sel 5
5 - 60
5.69
Skala Prioritas Outflow Sel 5
5 - 60
5.70
From To Chart Sel Keseluruhan
5 - 61
5.71
Inflow Sel Keseluruhan
5 - 62
5.72
Outflow Sel Keseluruhan
5 - 62
5.73
Skala Prioritas Inflow Sel Keseluruhan
5 - 62
5.74
Skala Prioritas Outflow Sel Keseluruhan
5 - 62
5.75
Alternatif jarak
material handling
tata letak baru sel 1
5 - 63
5.76
Alternatif jarak
material handling
tata letak baru sel 2
5 - 64
5.77
[image:7.612.112.529.101.682.2]Daftar Gambar
xiv
Universitas Kristen MaranathaTabel
Judul
Halaman
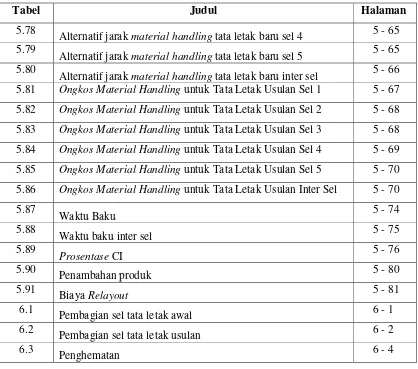
5.78
Alternatif jarak
material handling
tata letak baru sel 4
5 - 65
5.79
Alternatif jarak
material handling
tata letak baru sel 5
5 - 65
5.80
Alternatif jarak
material handling
tata letak baru inter sel
5 - 66
5.81
Ongkos Material Handling
untuk Tata Letak Usulan Sel 1
5 - 67
5.82
Ongkos Material Handling
untuk Tata Letak Usulan Sel 2
5 - 68
5.83
Ongkos Material Handling
untuk Tata Letak Usulan Sel 3
5 - 68
5.84
Ongkos Material Handling
untuk Tata Letak Usulan Sel 4
5 - 69
5.85
Ongkos Material Handling
untuk Tata Letak Usulan Sel 5
5 - 70
5.86
Ongkos Material Handling
untuk Tata Letak Usulan Inter Sel
5 - 70
5.87
Waktu Baku
5 - 74
5.88
Waktu baku inter sel
5 - 75
5.89
Prosentase
CI
5 - 76
5.90
Penambahan produk
5 - 80
5.91
Biaya
Relayout
5 - 81
6.1
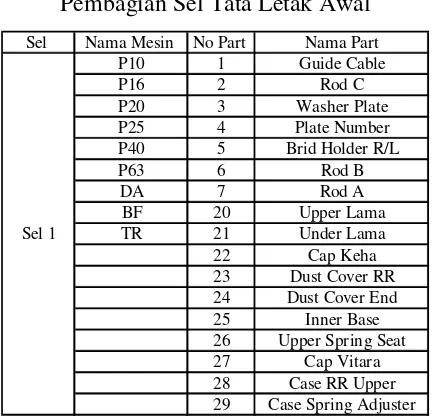
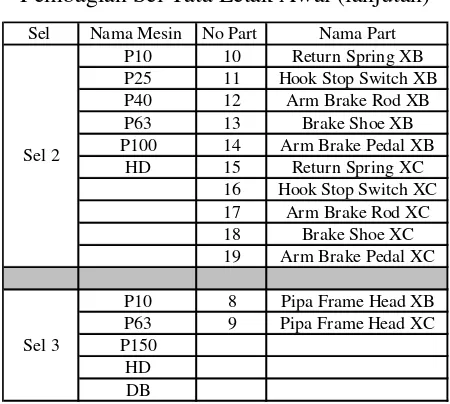
Pembagian sel tata letak awal
6 - 1
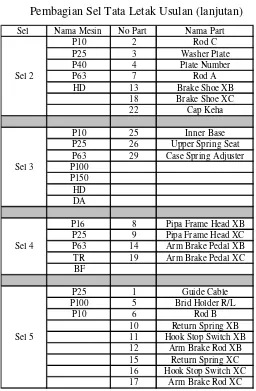
6.2
Pembagian sel tata letak usulan
6 - 2
6.3
[image:8.612.112.530.104.473.2]Daftar Gambar
xiv
Universitas Kristen MaranathaDAFTAR GAMBAR
Gambar
Judul
Halaman
2.1
Hubungan Antara Volume Produksi dan Variasi Produk
dengan Jenis Sistem Manufaktur
2 - 2
2.2
Fixed Layout
2 - 3
2.3
Product Layout
2 - 4
2.4
Process Layout
2 - 4
2.5
GT Flow Line
2 - 5
2.6
GT Cell
2 -5
2.7
GT Center
2 - 6
2.8
Matrik
Similarity coefisien
2 - 14
2.9
Kalkulasi jarak
2 - 32
2.10
Perhitungan
Aisle Distance
2 - 34
3.1
Bagan Alir Metodologi Penelitian
3 - 5
4.1
Struktur Organisasi PT. STALLION
4 - 2
4.2
Gambar Mesin P10
4 - 5
4.3
Gambar Mesin P16
4 - 6
4.4
Gambar Mesin P 20
4 - 6
4.5
Gambar Mesin P 25
4 - 6
4.6
Gambar Mesin P 40
4 - 7
4.7
Gambar Mesin P 63
4 - 7
4.8
Gambar Mesin P 100
4 - 7
4.9
Gambar Mesin P 150
4 - 8
4.10
Gambar Mesin Double Boring
4 - 8
4.11
Gambar Mesin Hidrolik
4 - 8
4.12
Gambar Mesin Double Action
4 - 9
4.13
Gambar Mesin Buffing
4 - 9
4.14
Gambar Mesin Trimming
4-10
4.15
Peta Proses Operasi Stay Head Light
4-11
4.16
Peta Proses Operasi Brake Pedal XB
4-12
4.17
Peta Proses Operasi Brake Pedal XC
4-13
4.18
Peta Proses Operasi Pipa Frame Head XB
4-14
4.19
Peta Proses Operasi Pipa Frame Head XC
4-15
4.20
Peta Proses Operasi Upper Lama
4-16
4.21
Peta Proses Operasi Under Lama
4-17
4.22
Peta Proses Operasi Cap Keha
4-18
Daftar Gambar
[image:10.612.131.506.105.393.2]xiv
Universitas Kristen MaranathaGambar
Judul
Halaman
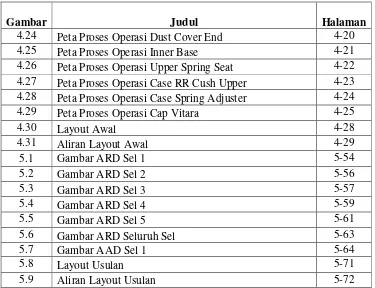
4.24
Peta Proses Operasi Dust Cover End
4-20
4.25
Peta Proses Operasi Inner Base
4-21
4.26
Peta Proses Operasi Upper Spring Seat
4-22
4.27
Peta Proses Operasi Case RR Cush Upper
4-23
4.28
Peta Proses Operasi Case Spring Adjuster
4-24
4.29
Peta Proses Operasi Cap Vitara
4-25
4.30
Layout Awal
4-28
4.31
Aliran Layout Awal
4-29
5.1
Gambar ARD Sel 1
5-54
5.2
Gambar ARD Sel 2
5-56
5.3
Gambar ARD Sel 3
5-57
5.4
Gambar ARD Sel 4
5-59
5.5
Gambar ARD Sel 5
5-61
5.6
Gambar ARD Seluruh Sel
5-63
5.7
Gambar AAD Sel 1
5-64
5.8
Layout Usulan
5-71
Daftar Lampiran
xvi
Universitas Kristen MaranathaDAFTAR LAMPIRAN
Lampiran
Judul
Halaman
1
Alternatif Jarak perpindahan tata letak usulan
L - 1
2
Alternatif Jarak perpindahan tata letak awal
L - 2
Lampiran L1- 1
Sel 1
Mesin P 20 - Buffing
a + b + c + d = 1,37 + 0,87 + 6,14 + 1,57 = 9,95 m
Mesin P 16 – P 10
Lampiran L1- 2
a + b + c + d = 1,5 + 1,48 + 5,63 + 1,44 = 10,05 m
Mesin P 16 – Double Action
Lampiran L1- 3
Mesin P 63 – P 40
a + b + c + d = 1,56 + 1,67 + 2,81 + 1,83 = 7,87 m
Lampiran L1- 4
a + b + c = 1,67 + 4,36 + 1,83 = 7,86 m
Mesin Double Action – P 63
Lampiran L1- 5
a + b + c = 3,81 + 1,95 + 1,83 = 7,59 m
Lampiran L1- 6
Mesin Double Action – P 40
a + b + c + d = 1,67 + 7,10 + 3,81 + 4,68 = 17,26 m
Lampiran L1- 7
a + b + c + d = 1,67 + 2,27 + 3,81 + 4,68 = 12,43 m
Mesin P 16 – Double Action
Lampiran L1- 8
a + b + c = 1,46 + 1,86 + 4,69 = 8,01 m
Lampiran L1- 9
Mesin Trimming – P 20
a + b + c = 1,52+ 5,71 + 1,35 = 8,58 m
Mesin P 10 – P 40
Lampiran L1- 10
a + b + c + d + e + f = 1,50 +1.48 +7,61+3,76+1,65+1,45 = 17,45 m
Mesin Double Action - Trimming
Lampiran L1- 11
a + b + c + d + e = 4,69 + 3,81 + 9,34 + 1,04 + 1,52 = 20,4 m
Lampiran L1- 12
Mesin P 63 - Trimming
a + b + c + d = 1,83 + 2,71 + 1,04 + 1,55 = 7,13 m
Lampiran L1- 13
Mesin P 20 - Buffing
a + b + c + d = 1,46+ 5,67 + 4,69 + 3,81 = 15,63 m
Sel 2
Mesin P 40 – P 25
Lampiran L1- 14
a + b + c + d + e = 1,72 + 3,04 + 3,26 + 2,54 + 1,63 = 12,19 m
Mesin P 40 – P 63
Lampiran L1- 15
a + b + c + d = 1,72 + 0,48 + 1,82 + 1,85 = 5,87 m
Lampiran L1- 16
Mesin P 10 – P 40
a + b + c = 1,47+ 2,96 + 1,72 = 6,16 m
Mesin P 40 - Hidrolik
Lampiran L1- 17
a + b + c + d = 1,72 + 9,2 + 1,65 + 1,80 = 14,37 m
Mesin P 25 – P 63
Lampiran L1- 18
a + b + c + d = 1,63+ 2,54 + 1,82 + 1,81 = 7,8 m
Lampiran L1- 19
Sel 3:
Mesin Trimming – P 25
a + b + c = 1,57 + 4,31 + 1,64 = 7,52 m
Lampiran L1- 20
a + b + c + d = 1,57+ 2,66 + 1,64 + 1,66 = 7,53 m
Mesin P 63 - Trimming
Lampiran L1- 21
Mesin P 16 – P 63
a + b + c + d = 1,44 + 1,79 + 3,41 + 1,84 = 8,48 m
Lampiran L1- 22
a + b + c + d + e = 1,79 + 1,44 + 3,59 + 3,41 + 1,84 = 12,07 m
Mesin P 25- Buffing
Lampiran L1- 23
a + b + c + d = 1,63 + 2,74 + 0,14 + 1,61 = 6,12 m
Lampiran L1- 24
Sel 4:
Mesin P 10 – P 63
a + b + c = 1,52 + 0,87 + 2,83 = 5,22 m
Lampiran L1- 25
a + b + c + d + e = 1,52 + 4,23 + 5,69 + 3,38 + 2,83 = 17,65 m
Lampiran L1- 26
a + b + c + d = 1,52 + 4,23 + 2,83 + 3,38 = 11,96 m
Mesin P 25 – P 100
Lampiran L1- 27
a + b + c + d = 1,63 + 3,54 + 2,87 + 3,05 = 11,09 m
Mesin P 150 – Hidrolik
Lampiran L1- 28
a + b + c + d + e = 1,5 + 1,79 + 3,06 + 0,32 + 1,7 = 8,37 m
Mesin P 100 – P 63
Lampiran L1- 29
a+b+c+d+e = 3,04 +| 2,86+6,09+2,86+3,36 = 18,2 m
Lampiran L1- 30
a +b + c+ d = 3,04 + 2,86 + 9,44 + 2,86 = 18,2 m
Lampiran L1- 31
a = 6,4 m
Lampiran L1- 32
a + b + c + d + e = 3,36+2,86+6,73+2,86+3,04 = 18,79
Lampiran L1- 33
Mesin Hidrolik – Double Boring
a + b + c + d + e = 1,7+3,27+3,13+3,31+2,72 = 14,13 m
Lampiran L1- 34
a + b + c + d = 1,7+3,27+0,41+3,31 = 8.69 m
Lampiran L1- 35
a + b + c + d + e + f = 1,7+3,27+3,13+6,73+2,72+3,4 = 20,95 m
Lampiran L1- 36
a + b + c + d + e + f = 1,7+3,27+2,31+6,73+2,64+3,4 = 20,05 m
Mesin P 63 – P 150
Lampiran L1- 37
a + b + c = 2,83 + 1,53 + 1,48 = 5,84 m
Lampiran L1- 38
a + b + c + d = 3,36 + 2,86 + 3,12 + 1,48 + 1,77 = 12,59 m
Lampiran L1- 39
a + b + c + d = 3,36 + 2,86 + 4,9 + 1,48 = 12,6 m
Lampiran L1- 40
a + b + c + d + e = 3,36 + 2,86 + 3,61 + 1,48 + 1,77 = 13,1 m
Sel 5:
Mesin P 10 – P 25
Lampiran L1- 41
a + b + c + d = 3,22 + 2,96 + 10,02 + 2,71
= 18,91 m
Lampiran L1- 42
a + b + c + d + e + f = 3,22 + 2,96 + 6,44 + 5,42 + 3,58 + 2,71
= 24,33 m
Mesin P 63 – P 10
a + b + c + d + e = 3,22 + 2,45 + 6,49 + 1,57 + 1,85
= 15,58 m
Lampiran L1- 43
a + b + c + d = 3,22 + 2,45 + 8,34 + 1,57 = 15,58 m
a + b + c + d = 3,22 + 2,45 + 1,85 + 1,57
= 9,09 m
Mesin P 100 – P 10
Lampiran L1- 44
a + b + c + d = 3,17 + 2,45 + 3,38 + 1,82
= 10,82 m
Mesin P100 – P 25
a + b + c = 1,82 + 6,66 + 2,7
= 11,18 m
Lampiran L2- 1
Sel 1 : Multi Part
Jarak P 10 – P 63
Lampiran L2- 2
Jarak P 10 – P 40
Lampiran L2- 3
Jarak P 10 – P 25
Lampiran L2- 4
Jarak P 10 – P 16
Lampiran L2- 5
Jarak P 40 – P 25
Lampiran L2- 6
Jarak P 63 – P 40
Lampiran L2- 7
Jarak P 40 – Double Action
Lampiran L2- 8
Jarak P 16 – Double Action
Lampiran L2- 9
Jarak P 16 – P 25
Lampiran L2- 10
Jarak P 16 – P 63
Lampiran L2- 11
Jarak Double action – trimming
Lampiran L2- 12
Jarak Trimming – P 20
Lampiran L2- 13
Jarak P 20 – P Buffing
Lampiran L2- 14
Jarak P 25 – P 63
Lampiran L2- 15
Jarak P 63 – Trimming
Lampiran L2- 16
Jarak P 63 – Double Action
Lampiran L2- 17
Jarak Trimming – P 25
Lampiran L2- 18
Jarak Buffing – P 25
Lampiran L2- 19
Sel 2: Brake Pedal
Jarak P 25 – P 100
Lampiran L2- 20
Jarak P 63 – P 100
Lampiran L2- 21
Jarak P 40 – Hidrolik
= a+b+c = 12.48 m
Sel 3 : Pipa Frame Head
Jarak P 10 – P 63
Lampiran L2- 22
Jarak P 150 – P 63
= a+b = 7.95 m
Jarak P 150 – Hidrolik
= a+b+c = 4.68 m
Lampiran L3-1
Dari P 10- P 25
No Waktu/detik
1 1,97
2 2,03
3 1,88
4 1,72
5 1,94
6 1,87
7 1,91
8 1,74
9 1,65
10 1,8
11 1,72
12 1,85
13 1,64
14 1,82
15 1,78
16 1,69
17 2,05
18 1,85
19 1,78
20 1,81
21 1,9
22 1,67
23 1,86
24 1,94
25 1,79
26 1,94
27 1,89
28 1,79
29 1,67
30 1,88
31 1,67
32 1,88
33 1,71
34 1,69
35 1,58
36 1,79
total 65,15
Lampiran L3-2
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Waktu Siklus: 65.15 / 36 = 1.81 Waktu Normal: Ws x P
Lampiran L3-3
Waktu Baku: Wn x (1+a) = 2.208 x (1 + 0.23) = 2.208 x 1.23 = 2.715 = 2.7 detik
Dari P 10- P 40 No Waktu/detik
1 1,84
2 1,8
3 1,82
4 1,86
5 1,83
6 1,78
7 1,8
8 1,86
9 1,79
10 1,76
11 1,79
12 1,84
13 1,87
14 1,79
15 1,81
16 1,84
17 1,77
18 1,79
19 1,84
20 1,79
21 1,81
22 1,84
23 1,82
24 1,8
25 1,78
26 1,84
27 1,77
28 1,79
29 1,84
30 1,87
31 1,83
32 1,88
33 1,84
34 1,79
35 1,83
36 1,81
total 65,41
Lampiran L3-4
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Waktu Siklus: 65.41 / 36 = 1.82 Waktu Normal: Ws x P
= 1.82 x 1.22 = 2.22 Waktu Baku: Wn x (1+a)
Lampiran L3-5
Dari P 10- P 63 No Waktu/detik
1 1,94
2 1,92
3 1,89
4 1,84
5 1,91
6 1,86
7 1,89
8 1,87
9 1,81
10 1,85
11 1,91
12 1,87
13 1,82
14 1,88
15 1,84
16 1,74
17 1,81
18 1,84
19 1,86
20 1,74
21 1,8
22 1,86
23 1,82
24 1,89
25 1,94
26 1,88
27 1,9
28 1,87
29 1,83
30 1,81
31 1,87
32 1,82
33 1,79
34 1,84
35 1,75
36 1,86
total 66,62
Lampiran L3-6
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Lampiran L3-7
Waktu Baku: Wn x (1+a) = 2.257 x (1 + 0.23) = 2.257 x 1.23 = 2.776 = 2.8 detik
Dari P 16- P 10 No Waktu/detik
1 1,67
2 1,62
3 1,75
4 1,74
5 1,68
6 1,72
7 1,76
8 1,79
9 1,64
10 1,68
11 1,71
12 1,68
13 1,75
14 1,64
15 1,62
16 1,74
17 1,79
18 1,67
19 1,59
20 1,64
21 1,7
22 1,79
23 1,76
24 1,73
25 1,79
26 1,72
27 1,78
28 1,68
29 1,71
30 1,76
31 1,74
32 1,69
33 1,67
34 1,77
35 1,74
36 1,76
total 61,67
Lampiran L3-8
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Waktu Siklus: 65.15 / 36 = 1.81 Waktu Normal: Ws x P
Lampiran L3-9
Waktu Baku: Wn x (1+a) = 2.086 x (1 + 0.23) = 2.086 x 1.23 = 2.565 = 2.6 detik
Dari P 16- P25 No Waktu/detik
1 1,39
2 1,41
3 1,47
4 1,42
5 1,47
6 1,46
7 1,49
8 1,44
9 1,41
10 1,38
11 1,39
12 1,48
13 1,45
14 1,47
15 1,41
16 1,48
17 1,44
18 1,39
19 1,34
20 1,45
21 1,4
22 1,37
23 1,4
24 1,39
25 1,37
26 1,47
27 1,43
28 1,48
29 1,44
30 1,41
31 1,47
32 1,42
33 1,41
34 1,48
35 1,5
36 1,47
total 51,55
Lampiran L3-10
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Waktu Siklus: 1.43 Waktu Normal: Ws x P
Lampiran L3-11
Waktu Baku: Wn x (1+a) = 1.744 x (1 + 0.23) = 1.744 x 1.23 = 2.145 = 2.1 detik
Dari P 16- P 63 No Waktu/detik
1 1,6
2 1,54
3 1,57
4 1,62
5 1,64
6 1,58
7 1,49
8 1,47
9 1,52
10 1,46
11 1,51
12 1,47
13 1,42
14 1,46
15 1,4
16 1,47
17 1,39
18 1,47
19 1,46
20 1,44
21 1,48
22 1,41
23 1,47
24 1,46
25 1,4
26 1,38
27 1,41
28 1,47
29 1,45
30 1,49
31 1,52
32 1,5
33 1,49
34 1,46
35 1,41
36 1,48
total 53,26
Lampiran L3-12
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Waktu Siklus: 1.48 Waktu Normal: Ws x P
= 1.48 x 1.22 = 1.805 Waktu Baku: Wn x (1+a)
Lampiran L3-13
Dari P 20- Buffing No Waktu/detik
1 1,74
2 1,76
3 1,74
4 1,78
5 1,72
6 1,7
7 1,78
8 1,74
9 1,76
10 1,77
11 1,68
12 1,72
13 1,75
14 1,74
15 1,71
16 1,64
17 1,71
18 1,75
19 1,74
20 1,7
21 1,73
22 1,71
23 1,68
24 1,75
25 1,77
26 1,79
27 1,74
28 1,79
29 1,72
30 1,8
31 1,74
32 1,76
33 1,73
34 1,64
35 1,73
36 1,75
total 62,46
Lampiran L3-14
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Waktu Siklus: 1.74
Lampiran L3-15
Waktu Baku: Wn x (1+a)
= 2.123 x (1 + 0.23) = 2.123 x 1.23 = 2.61 = 2.6 detik
Dari P 25- P 63 No Waktu/detik
1 1,71
2 1,76
3 1,73
4 1,7
5 1,78
6 1,71
7 1,74
8 1,79
9 1,77
10 1,75
11 1,71
12 1,73
13 1,78
14 1,74
15 1,79
16 1,77
17 1,74
18 1,76
19 1,71
20 1,79
21 1,74
22 1,81
23 1,77
24 1,84
25 1,76
26 1,79
27 1,81
28 1,84
29 1,8
30 1,76
31 1,71
32 1,79
33 1,74
34 1,76
35 1,84
36 1,73
Lampiran L3-16
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Lampiran L3-17
Waktu Baku: Wn x (1+a)
= 2.147 x (1 + 0.23) = 2.147 x 1.23 = 2.641 = 2.6 detik
Dari P 25- Buffing No Waktu/detik
1 1,8
2 1,76
3 1,84
4 1,79
5 1,81
6 1,88
7 1,84
8 1,81
9 1,79
10 1,77
11 1,72
12 1,78
13 1,79
14 1,75
15 1,73
16 1,7
17 1,79
18 1,71
19 1,78
20 1,84
21 1,86
22 1,81
23 1,87
24 1,79
25 1,72
26 1,74
27 1,81
28 1,84
29 1,87
30 1,81
31 1,82
32 1,84
33 1,86
34 1,79
35 1,74
36 1,81
Lampiran L3-18
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Lampiran L3-19
= 2.196 x (1 + 0.23) = 2.196 x 1.23 = 2.701 = 2.7 detik
Dari P 40- P 25 No Waktu/detik
1 1,57
2 1,59
3 1,57
4 1,54
5 1,57
6 1,58
7 1,52
8 1,59
9 1,57
10 1,53
11 1,59
12 1,57
13 1,56
14 1,55
15 1,59
16 1,64
17 1,62
18 1,68
19 1,67
20 1,57
21 1,59
22 1,57
23 1,61
24 1,58
25 1,55
26 1,57
27 1,59
28 1,64
29 1,69
30 1,67
31 1,64
32 1,67
33 1,58
34 1,54
35 1,59
36 1,57
Lampiran L3-20
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Lampiran L3-21
= 1.939 x (1 + 0.23) = 1.939 x 1.23 = 2.385 = 2.4 detik
Dari P 40 - DA No Waktu/detik
1 1,77
2 1,74
3 1,72
4 1,8
5 1,84
6 1,79
7 1,78
8 1,77
9 1,76
10 1,74
11 1,87
12 1,84
13 1,81
14 1,79
15 1,78
16 1,81
17 1,75
18 1,76
19 1,74
20 1,77
21 1,79
22 1,71
23 1,79
24 1,81
25 1,88
26 1,87
27 1,79
28 1,84
29 1,78
30 1,84
31 1,86
32 1,87
33 1,79
34 1,81
35 1,76
36 1,84
Lampiran L3-22
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Lampiran L3-23
= 2.196 x (1 + 0.23) = 2.196 x 1.23
= 2.701 = 2.7detik
Dari P 63 – P 40 No Waktu/detik
1 1,57
2 1,55
3 1,54
4 1,59
5 1,52
6 1,57
7 1,56
8 1,5
9 1,57
10 1,59
11 1,54
12 1,62
13 1,59
14 1,54
15 1,51
16 1,57
17 1,59
18 1,64
19 1,68
20 1,65
21 1,62
22 1,67
23 1,68
24 1,59
25 1,61
26 1,57
27 1,56
28 1,61
29 1,57
30 1,52
31 1,54
32 1,53
33 1,6
34 1,57
35 1,54
36 1,59
total 56,86
Lampiran L3-24
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Lampiran L3-25
= 1.927 x (1 + 0.23) = 1.927 x 1.23 = 2.370 = 2.4 detik
Dari P 63 - TR
No Waktu/detik
1 1,84
2 1,89
3 1,86
4 1,83
5 1,87
6 1,81
7 1,86
8 1,8
9 1,85
10 1,87
11 1,88
12 1,81
13 1,83
14 1,87
15 1,89
16 1,82
17 1,87
18 1,89
19 1,81
20 1,86
21 1,87
22 1,83
23 1,91
24 1,94
25 1,83
26 1,87
27 1,94
28 1,87
29 1,83
30 1,8
31 1,85
32 1,94
33 1,86
34 1,81
35 1,79
36 1,84
total 66,79
Lampiran L3-26
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Lampiran L3-27
= 2.269 x (1 + 0.23) = 2.269 x 1.23 = 2.790 = 2.8 detik
Dari DA- P63
No Waktu/detik
1 1,97
2 2,03
3 1,88
4 1,72
5 1,94
6 1,87
7 1,91
8 1,74
9 1,65
10 1,8
11 1,72
12 1,85
13 1,64
14 1,82
15 1,78
16 1,69
17 2,05
18 1,85
19 1,78
20 1,81
21 1,9
22 1,67
23 1,86
24 1,94
25 1,79
26 1,94
27 1,89
28 1,79
29 1,67
30 1,88
31 1,67
32 1,88
33 1,71
34 1,69
35 1,58
36 1,79
total 65,15
Lampiran L3-28
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Lampiran L3-29
= 2.208 x (1 + 0.23) = 2.208 x 1.23 = 2.715 = 2.7 detik
Dari TR- P 20 No Waktu/detik
1 1,75
2 1,68
3 1,64
4 1,62
5 1,7
6 1,69
7 1,65
8 1,63
9 1,58
10 1,64
11 1,72
12 1,75
13 1,71
14 1,69
15 1,7
16 1,65
17 1,67
18 1,72
19 1,75
20 1,78
21 1,72
22 1,75
23 1,69
24 1,67
25 1,71
26 1,75
27 1,79
28 1,69
29 1,62
30 1,66
31 1,59
32 1,64
33 1,62
34 1,67
35 1,61
36 1,68
Lampiran L3-30
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Lampiran L3-31
= 2.049 x (1 + 0.23) = 2.049 x 1.23 = 2.520 = 2.5 detik
Dari TR- P 25 No Waktu/detik
1 1,87
2 1,84
3 1,89
4 1,77
5 1,79
6 1,81
7 1,76
8 1,79
9 1,75
10 1,71
11 1,69
12 1,85
13 1,79
14 1,75
15 1,82
16 1,89
17 1,87
18 1,79
19 1,84
20 1,86
21 1,74
22 1,79
23 1,75
24 1,79
25 1,84
26 1,81
27 1,76
28 1,72
29 1,83
30 1,77
31 1,8
32 1,79
33 1,87
34 1,71
35 1,73
36 1,78
total 64,61
Lampiran L3-32
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Lampiran L3-33
= 2.184 x (1 + 0.23) = 2.184 x 1.23 = 2.686 = 2.7 detik
Dari TR- P 63 No Waktu/detik
1 1,64
2 1,68
3 1,65
4 1,69
5 1,62
6 1,64
7 1,67
8 1,63
9 1,68
10 1,71
11 1,69
12 1,64
13 1,62
14 1,73
15 1,75
16 1,71
17 1,68
18 1,63
19 1,68
20 1,62
21 1,68
22 1,72
23 1,75
24 1,69
25 1,73
26 1,78
27 1,76
28 1,78
29 1,74
30 1,69
31 1,63
32 1,67
33 1,72
34 1,66
35 1,68
36 1,69
total 60,73
Lampiran L3-34
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Lampiran L3-35
= 2.062 x (1 + 0.23) = 2.062 x 1.23 = 2.536 = 2.5 detik
Dari P 10- P 100 No Waktu/detik
1 1,79
2 1,82
3 1,88
4 1,84
5 1,87
6 1,79
7 1,76
8 1,75
9 1,73
10 1,78
11 1,73
12 1,76
13 1,79
14 1,82
15 1,86
16 1,89
17 1,75
18 1,79
19 1,84
20 1,69
21 1,74
22 1,78
23 1,75
24 1,89
25 1,84
26 1,83
27 1,88
28 1,79
29 1,72
30 1,78
31 1,84
32 1,79
33 1,76
34 1,81
35 1,79
36 1,8
total 64,72
Lampiran L3-36
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Lampiran L3-37
= 2.196 x (1 + 0.23) = 2.196 x 1.23 = 2.701 = 2.7 detik
Dari P 25- P 100 No Waktu/detik
1 1,54
2 1,51
3 1,57
4 1,59
5 1,55
6 1,51
7 1,49
8 1,48
9 1,42
10 1,47
11 1,43
12 1,4
13 1,52
14 1,5
15 1,57
16 1,49
17 1,47
18 1,53
19 1,57
20 1,51
21 1,57
22 1,48
23 1,43
24 1,49
25 1,56
26 1,52
27 1,48
28 1,61
29 1,54
30 1,57
31 1,51
32 1,49
33 1,46
34 1,56
35 1,58
36 1,51
total 54,48
Lampiran L3-38
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Lampiran L3-39
= 1.842 x (1 + 0.23) = 1.842 x 1.23 = 2.266 = 2.3 detik
Dari P 40- HD
No Waktu/detik
1 1,47
2 1,52
3 1,57
4 1,49
5 1,51
6 1,48
7 1,42
8 1,45
9 1,49
10 1,54
11 1,57
12 1,43
13 1,4
14 1,54
15 1,56
16 1,51
17 1,57
18 1,54
19 1,58
20 1,49
21 1,42
22 1,47
23 1,43
24 1,48
25 1,54
26 1,57
27 1,39
28 1,45
29 1,42
30 1,39
31 1,47
32 1,5
33 1,41
34 1,45
35 1,52
36 1,56
total 53,6
Lampiran L3-40
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Lampiran L3-41
= 1.818 x (1 + 0.23) = 1.818 x 1.23 = 2.236 = 2.2 detik
Dari P 100 - P 25 No Waktu/detik
1 1,81
2 1,84
3 1,79
4 1,84
5 1,8
6 1,83
7 1,78
8 1,75
9 1,82
10 1,87
11 1,81
12 1,86
13 1,88
14 1,94
15 1,85
16 1,81
17 1,87
18 1,84
19 1,89
20 1,83
21 1,87
22 1,79
23 1,8
24 1,79
25 1,82
26 1,88
27 1,91
28 1,84
29 1,79
30 1,81
31 1,9
32 1,84
33 1,87
34 1,82
35 1,87
36 1,91
total 66,22
Lampiran L3-42
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Lampiran L3-43
= 2.245 x (1 + 0.23) = 2.245 x 1.23 = 2.761= 2.8 detik
Dari P 100- P 63
No Waktu/detik
1 1,97
2 1,95
3 1,89
4 1,87
5 1,92
6 1,94
7 1,95
8 1,9
9 1,86
10 1,82
11 1,91
12 1,88
13 1,81
14 1,84
15 1,92
16 1,97
17 1,87
18 1,81
19 1,94
20 1,92
21 1,87
22 1,84
23 1,87
24 1,91
25 1,87
26 1,83
27 1,9
28 1,87
29 1,92
30 1,85
31 1,87
32 1,93
33 1,89
34 1,9
35 1,87
36 1,91
total 68,04
Lampiran L3-44
Perhitungan Waktu Baku: Faktor Penyesuaian
Keadaan Lambang Penyesuaian
Anggota Badan Terpakai C 0,02
Pedal Kaki - -
Penggunaan Tangan H2 0,17
Koordinasi antara Mata denganTangan J 0,02
Peralatan ( sedikit kontrol) O 0,01
jumlah 0,22
Dari tabel diatas didapatkan penyesuaian sebesar: P1 =1
P2 = 1+0,22 = 1.22 P = P1x P2 P = 1 x 1.22 = 1.22
Faktor Kelonggaran
Kelonggaran Pribadi: Kelonggaran
Pria 0,01
Kelonggaran untuk menghilangkan fatique
Tenaga yang di keluarkan (berat) 0,18
Sikap kerja (berdiri diatas 2 kaki) 0,01
Gerakan kerja (normal) 0
Kelelahan mata (pandangan yang terputus-putus) 0,01 Keadaan temperatur tempat kerja (normal) 0
Keadaan Atmosfer (cukup) 0,01
Keadaan lingkungan yang baik 0,01
Kelonggaran yang tak terhindarkan 0
Total 0,23
Lampiran L3-45
= 2.306 x (1 + 0.23) = 2.306 x 1.23 = 2.836 = 2.8 detik
Dari P 63 - P 100 No Waktu/detik
1 1,65
2 1,68
3 1,64
4 1,67
5 1,62
6 1,68
7 1,64
8 1,69
9 1,72
10 1,64
11 1,68
12 1,72
13 1,74
14 1,68
15 1,62
16