6
BAB II
TINJAUAN PUSTAKA
Konsep serta teori yang akan dijabarkan di dalam bab kedua ini adalah teori- konsep serta teori yang mendasari pengujian penelitian yang dilakukan meliputi:
Pembangkit Listrik Tenaga Mikro Hidro (PLTMH), Generator, Governor, Sistem Eksitasi, Kontrol Fuzzy, PID, dan Flower Pollination Algorithm (FPA).
2.1 Pembangkit Listrik Tenaga Mikro Hidro (PLTMH)
Pembangkit listrik yang mempunyai skala kecil (kurang dari 100 kW) yangmana memiliki mekanisme yaitu memanfaatkan debit air yang ada pada aliran sungai, aliran air pada saluran irigasi, ataupun air terjun, pembangkit ini lebih familiar didengar sebagai Pembangkit Listrik Tenaga Mikro Hidro (PLTMH).
Secara teknis didapatkan tiga elemen atau unsur utama yang dianggap penting di dalam sistem mikro hidro yaitu: sumber energi berupa air, dilanjut dengan turbin, dan kemudian generator. Pipa pesat (penstock pipe) dilalui oleh air yang mengalir dengan muatan tertentu agar kemudian dilanjutkan untuk dialirkan menuju rumah instalasi (power house), di rumah instalasi ini air tadi akan dialirkan lagi agar menabrak turbin sehingga turbin akan menghasilkan energi mekanik, yang mena dengan energi mekanik ini akan digunakan untuk menggerakkan generator, sehingga generator pun mampu menghasilkan listrik [15].
2.1.1 Penstock Pipe
Pipa yang dimanfaatkan untuk mengalirkan aliran air sungai untuk menggerakkan turbin pada PLTMH familiar didengar dengan istilh pipa pesat. Bahan alam seperti bambu dan kayu mampu menjadi bahan penstock alami. Sedangkan baja, beton, UPVC, GRP, dan HDPE, sebagai penstock buatan.
Di dalam penstock terdapat bagian katup yang berguna sebagai pengendali aliran air seperti: ball valve, butterfly valve, pilot valve, globe valve, dan gate valve [16].
2.1.2 Turbin Air
7
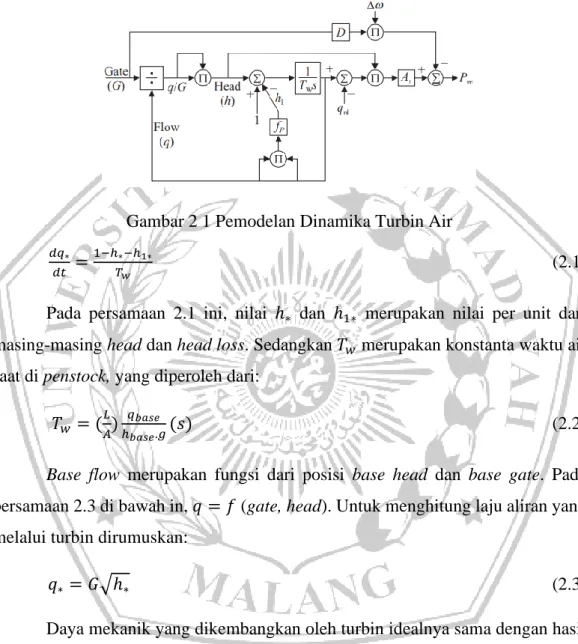
Energi potensial berupa daya jatuh air ini sebelumnya dikonversikan dulu oleh turbin air yang kemudian akan menjadi daya putar yang digunakan untuk memutar generator. Pemodelan dinamika turbin air dapat disimak pada gambar 2.1 di bawah ini.
Gambar 2 1 Pemodelan Dinamika Turbin Air
𝑑𝑞∗
𝑑𝑡 =1−ℎ∗−ℎ1∗
𝑇𝑤 (2.1) Pada persamaan 2.1 ini, nilai ℎ∗ dan ℎ1∗ merupakan nilai per unit dari
masing-masing head dan head loss. Sedangkan 𝑇𝑤 merupakan konstanta waktu air saat di penstock, yang diperoleh dari:
𝑇𝑤 = (𝐿
𝐴) 𝑞𝑏𝑎𝑠𝑒
ℎ𝑏𝑎𝑠𝑒.𝑔(𝑠) (2.2) Base flow merupakan fungsi dari posisi base head dan base gate. Pada persamaan 2.3 di bawah in, 𝑞 = 𝑓 (gate, head). Untuk menghitung laju aliran yang melalui turbin dirumuskan:
𝑞∗ = 𝐺√ℎ∗ (2.3) Daya mekanik yang dikembangkan oleh turbin idealnya sama dengan hasil kali antara flow rate dan head, dikalikan dengan faktor konversi yang sesuai. Turbin yang sebenarnya tidak 100% efisien, sehingga laju aliran tanpa beban yang memperhitungkan rugi-rugi daya tetap pada turbin akan dikurangi dengan laju aliran sebenarnya. Kecepatan penyimpangan dari efek redaman yaitu fungsi dari gate opening, juga mempengaruhi daya mekanik.
8
Daya turbin per unit 𝑃𝑚 pada basis generator MVA, dinyatakan dalam persamaan 2.4 di bawah, sebagai berikut:
𝑃𝑚 = 𝐴𝑡ℎ∗(𝑞∗− 𝑞𝑛𝑙∗) − 𝐺. 𝐷. ∆𝜔 (2.4) Dengan 𝑞𝑛𝑙∗ adalah aliran tanpa beban per unit dan 𝐴𝑡 diasumsikan konstan dan dihitung. Turbin menggunakan satuan MW sedangkan generator menggunakan satuan MVA, dinyatakan sebagai:
𝐴𝑡 = 𝑇𝑢𝑟𝑏𝑖𝑛 𝑀𝑊 𝑟𝑎𝑡𝑖𝑛𝑔
(𝐺𝑒𝑛𝑒𝑟𝑎𝑡𝑜𝑟 𝑀𝑉𝐴 𝑟𝑎𝑡𝑖𝑛𝑔)ℎ𝑟∗(𝑞𝑟∗−𝑞𝑛𝑙∗) (2.5) Dalam persamaan 2.5 ini, dengan ℎ𝑟∗ merupakan head pada rated flow. 𝑞𝑟 merupakan aliran per unit pada rated load.
Dalam beberapa program stabilitas, parameter 𝐴𝑡 juga disebut turbin gain, digunakan untuk mengonversi posisi actual gate ke posisi effective gate, yaitu pada persamaan 2.6 di bawah ini
𝐴𝑡= 1
(𝑔𝐹𝐿−𝑔𝑁𝐿) (2.6) Persamaan kinerja transien dari turbin air berlandaskan anggapan di bawah ini:
a) Pisau turbin air dianggap hambatan gesek yang dapat diabaikan b) Water hammer pada penstock dapat diabaikan
c) Kecepatan air di penstock bermacam ragam menyesuaikan dengan pembukaan gerbang
d) Kecepatan laju air selaras dengan daya hasil keluaran.
2.2 Generator Sinkron
Mesin listrik yang dimanfaatkan untuk mengubah energi mekanik menjadi energi listrik dengan perantara media electromagnet adalah generator.
Generator terbagi menjadi dua, yaitu generator sinkron dan asinkron. Generator sinkron sendiri merupakan mesin listrik pada pembangkit yang paling banyak diterapkan dikarenakan:
a) Minimnya tarif yang diperlukan
b) Bervariasinya daya yang ditawarkan di pasaran
9
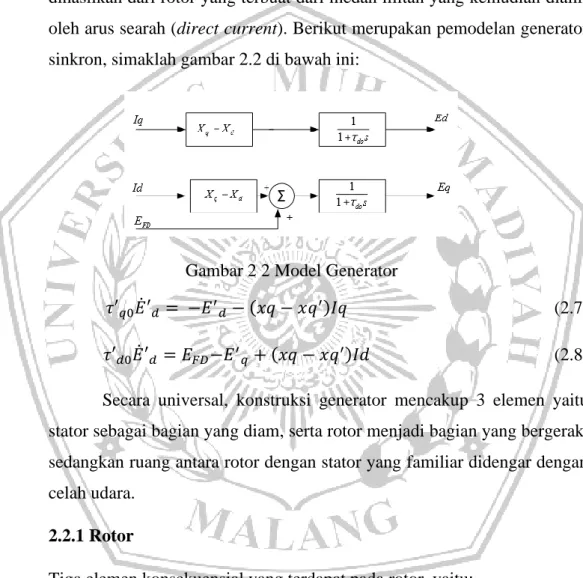
c) Tarif yang minim serta mudahnya pengoperasian serta pemeliharaannya Generator yang bekerja secara sinkron, disebutkan sebagai generator sinkron, maksudnya di sini adalah generator sinkron yang berputar secara selaras akan menghasilkan frekuensi. Rotor pada generator sinkron berfungsi sebagai penghasil daya yang bisa disebut sebagai anker. medan magnet dengan kecepatan dan arah putar yang selaras dengan putaran rotor dihasilkan dari rotor yang terbuat dari medan lilitan yang kemudian dialiri oleh arus searah (direct current). Berikut merupakan pemodelan generator sinkron, simaklah gambar 2.2 di bawah ini:
Gambar 2 2 Model Generator
𝜏′𝑞0𝐸̇′𝑑 = −𝐸′𝑑 − (𝑥𝑞 − 𝑥𝑞′)𝐼𝑞 (2.7) 𝜏′𝑑0𝐸̇′𝑑 = 𝐸𝐹𝐷−𝐸′𝑞+ (𝑥𝑞 − 𝑥𝑞′)𝐼𝑑 (2.8) Secara universal, konstruksi generator mencakup 3 elemen yaitu stator sebagai bagian yang diam, serta rotor menjadi bagian yang bergerak, sedangkan ruang antara rotor dengan stator yang familiar didengar dengan celah udara.
2.2.1 Rotor
Tiga elemen konsekuensial yang terdapat pada rotor, yaitu:
a) Poros Rotor : Rotor mempunyai poros-poros berupa slot, yang kemudian diberikan kumparan di poros rotor tersebut.
b) Slip ring : Cincin yang terbuat dari logam yang melingkari poros rotor yang saling berjarak familiar didengar dengan slip ring. Yangmana di sana akan dipasangi terminal lilitan rotor lalu dihubungkan ke sumber arus DC melalui sikat.
10
c) Kumparan Rotor : Kumparan medan rotor inilah yang berperan utama dalam menghasilkan medan magnet.
2.2.2 Stator
Tiga elemen konsekuensial yang terdapat pada stator, yaitu:
a) Penyangga inti jangkar generator familiar didengar dengan Rangka Stator.
b) Laminasi-laminasi yang terpasang pada rangka stator merupakan elemen penting dari inti stator.
c) Tempat peletakkan kumparan stator familiar didengar dengan nama slot dan gigi alur [17].
Korelasi yang ada di antara frekuensi listrik dengan kecepatan rotor yang berada dalam stator dituliskan dengan persamaan 2.9 di bawah berikut ini :
𝑓 =𝑛𝑠𝑃
120 (2.9) Dengan :
𝑓 = 𝐹𝑟𝑒𝑘𝑢𝑒𝑛𝑠𝑖 𝑆𝑡𝑎𝑡𝑜𝑟 (𝐻𝑧)
𝑛𝑠 = 𝐾𝑒𝑐𝑒𝑝𝑎𝑡𝑎𝑛 𝑃𝑢𝑡𝑎𝑟 𝑅𝑜𝑡𝑜𝑟 (𝑟𝑝𝑚) 𝑃 = 𝐽𝑢𝑚𝑙𝑎ℎ 𝐾𝑢𝑡𝑢𝑏
Daya yang diperlukan oleh konsumen (beban listrik) berbanding lurus dengan daya yang dibangkitkan oleh generator. Ketika daya beban yang diperlukan konsumen lebih besar dari daya yang dapat dibangkitkan generator maka frekuensinya akan turun. Sebaliknya, Ketika daya generator yang dibangkitkan melebihi kebutuhan daya konsumen maka frekuensi akan naik [18].
2.3 Sistem Governor
11
Mesin listrik yang dapat dimanfaatkan untuk mengendalikan putaran dari sebuah turbin yaitu dengan langkah mengendalikan total besaran aliran fluida yang masuk ke dalam turbin disebut dengan governor [19].
Governor memiliki mekanisme yang relatif sederhana, dengan mengunggulkan kecepatan putaran mesin yang ada. Sepasang bandul disambungkan pada poros, adanya pergerakan poros tersebut bergerak beriringan dengan perputaran bandul. Bandul yang terlempar sendiri diakibatkan oleh adanya perputaran gaya sentrifugal. Poros yang dilengkapi dengan collar dihubungkan dengan bandul, perputaran dari gaya yang dimiliki bandul berbanding lurus dengan naiknya collar dan ketika collar berpindah ke bawah maka gerak bandul juga berpindah ke bawah. Perpindahan posisi collar dimanfaatkan untuk selanjutnya akan digunakan dalam pengoperasian ataupun pengaturan aliran fluida [19].
Kegunaan fundamental bagi governor sendiri adalah pengendalian daya beban serta kecepatan motor turbin. Perihal kegunaan dari daya beban serta kecepatan motor menyertakan feedback dari error kecepatan dalam pengendalian letak gerbang (gate). Perihal pengujian sistem yang opimal dapat dipindai dari beberapa unsur, kecepatan tinggi dari governor ini disediakan dengan karakteristik droop yang berguna sebagai penyeimbang beban listrik dengan pembangkit listrik.
Nilai droop timggi serta tempo resetting yang relatif lama dapat menghasilkan kinerja yang terbilang stabil serta optimal. Tentunya perihal ini harus dibarengi dengan ketersediaan nilai feedback ataupun pembatasan gain transient.
Mekanisme yang dimiliki oleh turbin air sendiri dilengkapi dengan pengendalian frekuensi ataupun pengendalian valve. Mekanisme dari pengendalian valve ini adalah dengan cara memberi akses untuk penambahan kapasitas air ketika frekuensi turun dan akan membatasi akses demi berkurangnya kapasitas air sewaktu frekuensi mulai bertambah, tersebut merupakan mekanisme dari speed governor.
Governor sendiri memiliki beberapa variasi seperti Electric Hydraulic Control (EHC) serta Mechanic Hydraulic Control (MHC) [20]
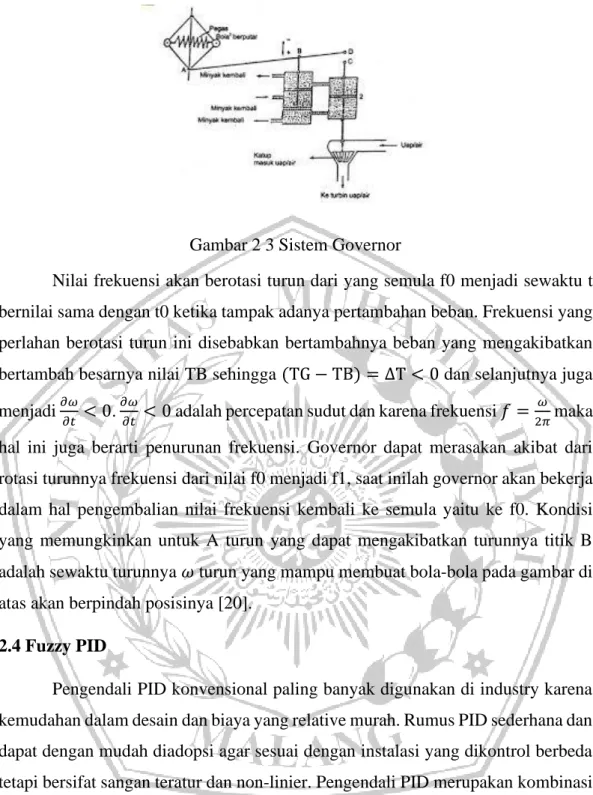
Berikut di bawah ini merupakan model dinamika governor turbin (air) ditunjukkan pada gambar 2.3
12
Gambar 2 3 Sistem Governor
Nilai frekuensi akan berotasi turun dari yang semula f0 menjadi sewaktu t bernilai sama dengan t0 ketika tampak adanya pertambahan beban. Frekuensi yang perlahan berotasi turun ini disebabkan bertambahnya beban yang mengakibatkan bertambah besarnya nilai TB sehingga (TG − TB) = ∆T < 0 dan selanjutnya juga menjadi 𝜕𝜔
𝜕𝑡 < 0. 𝜕𝜔
𝜕𝑡 < 0 adalah percepatan sudut dan karena frekuensi 𝑓 = 𝜔
2𝜋 maka hal ini juga berarti penurunan frekuensi. Governor dapat merasakan akibat dari rotasi turunnya frekuensi dari nilai f0 menjadi f1, saat inilah governor akan bekerja dalam hal pengembalian nilai frekuensi kembali ke semula yaitu ke f0. Kondisi yang memungkinkan untuk A turun yang dapat mengakibatkan turunnya titik B adalah sewaktu turunnya 𝜔 turun yang mampu membuat bola-bola pada gambar di atas akan berpindah posisinya [20].
2.4 Fuzzy PID
Pengendali PID konvensional paling banyak digunakan di industry karena kemudahan dalam desain dan biaya yang relative murah. Rumus PID sederhana dan dapat dengan mudah diadopsi agar sesuai dengan instalasi yang dikontrol berbeda tetapi bersifat sangan teratur dan non-linier. Pengendali PID merupakan kombinasi dari pengendali PI dan PD. Pengendali PD untuk kasus kompensator timbal pengendali PD mampu meningkatkan respon transien, stabilitas sistem, serta meningkatkan bandwidth sistem.
PID adalah kompensator laging-leading. Pengendali PI dan pengendali PD bekerja di wilayah frekuensi yang berbeda. Pengendali PI mampu bekerja di wilayah frekuensi rendah dan pengendali PD bekerja di wilayah frekuensi tinggi.
13
Pengendali PID dapat digunakan saat sistem memerlukan perbaikan baik dalam performa transien maupun kondisi mapan.
Pengendali PID memiliki ciri khusus berupa adanya umpan balik (feedback). Proportional-Integral-Derivative (PID) memilki karakteristik tersendiri dari setiap pengendalinya seperti pengendali proportional (P) yang mampu menurunkan error steady state, menaikkan overshoot dan memperbaiki settling time serta rise time. Pengendali integral (I) yang mampu menghilangkan error steady state dan mampu meningkatkan kestabilan sebuah sitem kontrol. Pengendali derivative (D) yang mampu mempercepat respon suatu sistem sehingga pengendalian waktu transien dapat dikurangi [21].
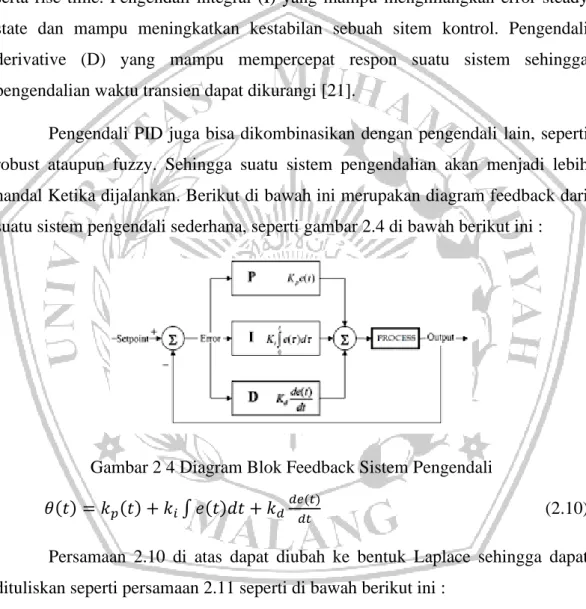
Pengendali PID juga bisa dikombinasikan dengan pengendali lain, seperti robust ataupun fuzzy. Sehingga suatu sistem pengendalian akan menjadi lebih handal Ketika dijalankan. Berikut di bawah ini merupakan diagram feedback dari suatu sistem pengendali sederhana, seperti gambar 2.4 di bawah berikut ini :
Gambar 2 4 Diagram Blok Feedback Sistem Pengendali
𝜃(𝑡) = 𝑘𝑝(𝑡) + 𝑘𝑖∫ 𝑒(𝑡)𝑑𝑡 + 𝑘𝑑𝑑𝑒(𝑡)𝑑𝑡 (2.10) Persamaan 2.10 di atas dapat diubah ke bentuk Laplace sehingga dapat dituliskan seperti persamaan 2.11 seperti di bawah berikut ini :
𝜃(𝑠) = 𝑘𝑝𝐸(𝑡) + 𝑘𝑖𝐸(𝑠)
𝑠 + 𝑘𝑑𝑠𝐸(𝑠) (2.11) Fungsi alih pengendali PID dirumuska dengan persamaan 2.12 berikut di bawah ini:
𝐺𝑐(𝑠) = 𝑄(𝑠)
𝐸(𝑠)= 𝑘𝑝+𝐾𝑖
𝑠 + 𝑘𝑑𝑆 = 𝐾𝑑𝑆2+𝐾𝑝𝑆+𝐾𝑖
𝑠 (2.12)
14
Sedangkan fuzzy sudah sering digunakan oleh para peneliti untuk digunakan dalam sistem pengendali. Penyelesaian masalah menggunakan fuzzy dianggap lebih mudah dibandingkan dengan sistem probabilitas (pengukuran). Adapun alasan penggunaan logika fuzzy di antaranya:
a) Mempunyai daya toleransi dalam hal kekurang tepatannya sebuah data yang tersedia
b) Senang dipahami c) Luwes
Variabel yang digunakan haruslah menggambarkan keanggotaan fuzzy namun di sisi lain rumus-rumus yang merupakan hasil dari elemen yang diharapkan simple saja agar memudahkan komputasinya. Berdasarkan permasalahan ini Profesor Lotfi A Zadeh mencetuskan idenya tentang “derajat keanggotaan” dari tiap-tiap elemennya.
Peletakkan nilai data sebagai masukan ke dalam nilai keanggotaan (membership function) ditunjukkan sebagai kurva sering pula dikatakan dengan derajat keanggotaan yang memiliki interval dimulai dari 0 sampai 1.
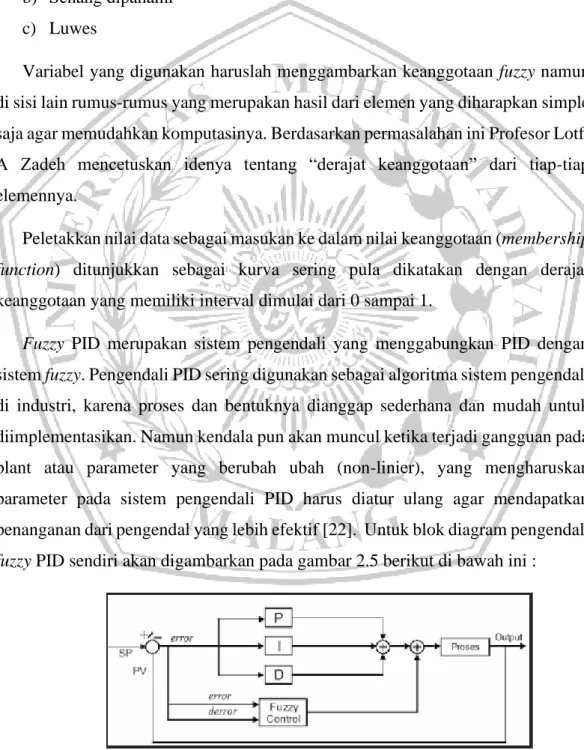
Fuzzy PID merupakan sistem pengendali yang menggabungkan PID dengan sistem fuzzy. Pengendali PID sering digunakan sebagai algoritma sistem pengendali di industri, karena proses dan bentuknya dianggap sederhana dan mudah untuk diimplementasikan. Namun kendala pun akan muncul ketika terjadi gangguan pada plant atau parameter yang berubah ubah (non-linier), yang mengharuskan parameter pada sistem pengendali PID harus diatur ulang agar mendapatkan penanganan dari pengendal yang lebih efektif [22]. Untuk blok diagram pengendali fuzzy PID sendiri akan digambarkan pada gambar 2.5 berikut di bawah ini :
Gambar 2 5 Diagram Blok Pengendali Fuzzy PID
15 2.5 Konsep Flower Pollination Algorithm
Di dalam pemodelan aplikasi dalam bidang kendali, masalah yang sering didapati adalah tentang optimasi. Masalah optimasi yang sering ditemui adalah parameter yang besifat non-linier. Banyak dari sistem pengendalian konvensional yang tidak mampu menangani parameter yang bersifat non-linier.
Pada tahun 2012, seorang Senior Research Scientist bernama Xin She Yang membuat penemuan yaitu Flower Pollination Algorithm (FPA).
Pembuatan algoritma yang satu ini terinspirasi dari penyerbukan bunga.
Algoritma ini dianggap mampu lebih efisien dibandingkan Particle Swarm Optimization (PSO) ataupun Genetic Algorithm (GA). Menurut pendapat dari Xin She Yang sendiri, algoritma ini diakui sangat efisien dalam menjalankan komputasi dan memanifestasikan peningkatan dari algoritma yang ditemukan oleh Xin She Yang sebelumnya [14].
Berikut di bawah ini merupakan empat aturan yang digunakan untuk menjelaskan FPA:
a) Penyerbukan silang dan penyerbukan biotik dianggap sebagai penyerbukan global dengan organisme penyerbuk pembawa serbuk sari yang menjalankannya dengan putaran levy flight.
b) Penyerbukan mandirir dan penyerbukan abiotic dianggap sebagai penyerbukan lokal.
c) Flower constancy dianggap memiliki peluang pemupukkan yang seimbang dengan kesamaan dari dua bunga yanag terlibat.
d) Pergantian dari penyerbukan lokal ke global atau sebaliknya dapat dikendalikan dengan probabilitas p 𝜖 [0,1].
Penyerbukan lokal serta penyerbukan global merupakan dua tahapan primer dalam algoritma ini. Pertama, penyerbukan global, dalam tahapan ini adanya serbuk sari dari bunga yang dibawa oleh serangga penyerbuk sehingga serbuk sari tersebut mampu melalui perjalanan jarak yang terbilang jauh, berbanding lurus dengan pergerakan serangga yang dapat terbang dan berpindah bebas di wilayah yang luas.
16
Berkaca dari metode di atas, metode ini dianggap andal dalam menghasilkan solusi yang paling efisien derta optimal yang direpresentasikan dengan aturan pertama, ditambah dengan fenomena flower constancy yang dapat direpresentasikan secara matematis. Adapun sewaktu nilai probabilitas (p) dinyatakan lebih besar nilainya dibandingkan dari nilai acak, penyerbukan yang dipakai adalah penyerbukan global, untuk rumusnya dijabarkan melalui rumus persamaan 2.13 beikut di bawah ini :
𝑥𝑖𝑡+1= 𝑥𝑖𝑡+ 𝐿(𝑔∗− 𝑥𝑡𝑖) (2.13) Berikut di bawah ini adalah fungsi untuk jarak penyerbukan bunga
dituliskan dengan persamaan 2.14 sampai 2.19 berikut di bawah ini : 𝐿~𝜆Γ(𝜆)sin(𝜋𝛾2)
𝜋 1
𝑠1+𝜆 , (S>> S0 >0) (2.14) 𝑆 = 𝑢
|𝑣|1/𝛽 (2.15) 𝜎𝑢 = {𝑟(1+𝛽)sin (𝜋𝛽
2) 𝑟[(1+𝛽)2]𝛽2
𝛽−1 2
} (1/β) (2.16) 𝑁(0,1) =𝑥−𝜇
𝜎 (2.17) 𝜎 = √
1
𝑁−(∑𝑁𝑖=1(𝑥𝑖−𝑥)2
𝑁−1 (2.18) Γ(𝑛) = ∫ 𝑡0∞ 𝑥−1𝑒−𝑡 (2.19) Adapun sewaktu kondisi menyatakan bahwasanya nilai probabilitas (p) relatif lebih kecil dibandingkan dengan nilai acak, maka dapat dirumuskan dengan persmaan 2.20 berikut di bawah ini :
𝑥𝑖𝑡+1= 𝑥𝑖𝑡+ 𝜀(𝑥𝑗𝑡− 𝑥𝑘𝑡) (2.20) Dengan:
𝑥𝑖𝑡 = 𝑆𝑒𝑟𝑏𝑢𝑘 𝑠𝑎𝑟𝑖 𝑖 𝑎𝑡𝑎𝑢 𝑣𝑒𝑘𝑡𝑜𝑟 𝑠𝑜𝑙𝑢𝑠𝑖 𝑖 𝑝𝑎𝑑𝑎 𝑖𝑡𝑒𝑟𝑎𝑠𝑖 𝑡 𝑔∗ = 𝑆𝑜𝑙𝑢𝑠𝑖 𝑡𝑒𝑟𝑏𝑎𝑖𝑘 𝑑𝑖𝑖𝑡𝑒𝑟𝑎𝑠𝑖 𝑦𝑎𝑛𝑔 𝑠𝑒𝑑𝑎𝑛𝑔 𝑏𝑒𝑟𝑙𝑎𝑛𝑔𝑠𝑢𝑛𝑔 𝐿 = 𝐽𝑎𝑟𝑎𝑘 𝑝𝑒𝑛𝑦𝑒𝑟𝑏𝑢𝑘𝑎𝑛 𝑜𝑙𝑒ℎ 𝑠𝑒𝑟𝑎𝑛𝑔𝑔𝑎
Γ(𝑛) = 𝐹𝑢𝑛𝑔𝑠𝑖 𝑔𝑎𝑚𝑚𝑎 𝑠𝑡𝑎𝑛𝑑𝑎𝑟
17
𝜆 = 𝑃𝑎𝑟𝑎𝑚𝑒𝑡𝑒𝑟 𝑢𝑘𝑢𝑟𝑎𝑛 𝑝𝑒𝑛𝑦𝑒𝑟𝑏𝑢𝑘𝑎𝑛
𝛾 = 𝑈𝑘𝑢𝑟𝑎𝑛 𝑙𝑒𝑎𝑟𝑛𝑖𝑛𝑔 𝑟𝑎𝑡𝑒 𝑢𝑛𝑡𝑢𝑘 𝑜𝑝𝑒𝑟𝑎𝑠𝑖 𝑜𝑝𝑡𝑖𝑚𝑎𝑠𝑖 𝑑𝑒𝑛𝑔𝑎𝑛 𝐹𝑃𝐴
𝑆 = 𝑆𝑦𝑚𝑚𝑒𝑡𝑟𝑖𝑐 𝐿𝑒𝑣𝑦 𝑆𝑡𝑎𝑏𝑙𝑒 𝐷𝑖𝑠𝑡𝑟𝑖𝑏𝑢𝑡𝑖𝑜𝑛 𝑢 = 𝐷𝑖𝑠𝑡𝑟𝑖𝑏𝑢𝑠𝑖 𝑛𝑜𝑟𝑚𝑎𝑙 𝑁(0,1) ∗ 𝜎𝑢
𝑣 = 𝐷𝑖𝑠𝑡𝑟𝑖𝑏𝑢𝑠𝑖 𝑛𝑜𝑟𝑚𝑎𝑙 𝑁(0,1)
𝛽 = 𝐵𝑒𝑡𝑎 𝑑𝑒𝑛𝑔𝑎𝑛 𝑛𝑖𝑙𝑎𝑖 0 𝑠𝑎𝑚𝑝𝑎𝑖 𝑑𝑒𝑛𝑔𝑎𝑛 2 𝜎𝑢 = 𝑆𝑖𝑔𝑚𝑎 𝑢
𝑁 = 𝐵𝑎𝑛𝑦𝑎𝑘𝑛𝑦𝑎 𝑛𝑖𝑙𝑎𝑖 𝑦𝑎𝑛𝑔 𝑎𝑘𝑎𝑛 𝑑𝑖𝑐𝑎𝑟𝑖 𝑠𝑡𝑎𝑛𝑑𝑎𝑟 𝑑𝑒𝑣𝑖𝑎𝑠𝑖𝑛𝑦𝑎 𝑥𝑖 = 𝐷𝑎𝑡𝑎 𝑏𝑒𝑟𝑑𝑖𝑠𝑡𝑟𝑖𝑏𝑢𝑠𝑖 𝑛𝑜𝑟𝑚𝑎𝑙 𝑖𝑛𝑑𝑒𝑘𝑠 𝑘𝑒 − 𝑖
𝑛 = 𝑁𝑖𝑙𝑎𝑖 𝑦𝑎𝑛𝑔 𝑎𝑘𝑎𝑛 𝑑𝑖ℎ𝑖𝑡𝑢𝑛𝑔 𝑓𝑢𝑛𝑔𝑠𝑖 𝑔𝑎𝑚𝑚𝑎𝑛𝑦𝑎 𝑥 = 𝑉𝑎𝑟𝑖𝑎𝑏𝑒𝑙 𝑝𝑒𝑢𝑏𝑎ℎ
𝑒 = 2.71828
𝜀 = 𝐷𝑖𝑠𝑡𝑟𝑖𝑏𝑢𝑠𝑖 𝑠𝑒𝑟𝑎𝑔𝑎𝑚 [0,1]
𝑥𝑗𝑡 = 𝑆𝑜𝑙𝑢𝑠𝑖 𝑣𝑒𝑘𝑡𝑜𝑟 𝑗 𝑝𝑎𝑑𝑎 𝑖𝑡𝑒𝑟𝑎𝑠𝑖 𝑡 𝑥𝑘𝑡 = 𝑆𝑜𝑙𝑢𝑠𝑖 𝑣𝑒𝑘𝑡𝑜𝑟 𝑘 𝑝𝑎𝑑𝑎 𝑖𝑡𝑒𝑟𝑎𝑠𝑖 𝑡
Pada proses penyerbukan bunga ini terdapat beberapa parameter yang digunakan pada metode FPA seperti di bawah berikut ini, seperti:
1. Jumlah populasi bunga yang ada di taman
2. Kemungkinan serangga berpindah (probability switch) 3. Parameter iterasi
4. Dimensi
5. Batas atas (Upper bound) dan batas bawah (Lower bound) yang ada pada setiap dimensi.