Perancangan Neural Network untuk Menggerakkan Posisi
Laras Meriam dengan
Platform yang Bergerak
Wiwik Wiharti 2208202007
Dosen Pembimbing :
Ir. Rusdhianto E.A.K, MT Ir. Ali Fatoni, MT
zPendahuluan
zKajian Pustaka & Dasar Teori zMetode Penelitian
zSimulasi dan Analisis
zKesimpulan
Latar Belakang
z
Peralatan persenjataan meriam sebagai salah satu perangkat persenjataan utama yang terdapat pada kapal militer
z
Pergerakan kapal yang disebabkan oleh gelombang laut, kapal akan ikut bergerak ke atas dan ke bawah yang secara tidak langsung juga akan mempengaruhi posisi meriam itu sendiri.
z
Melakukan penelitian menggunakan Neural
Network Control untuk menggerakkan
training dan elevasi meriam .
Perumusan
Perumusan Masalah Masalah
z Bagaimana mendesain dan membuat sebuah plant yaitu model meriam dengan platform
yang bergerak, dapat melakukan gerakan training dan elevasi membentuk sudut
seminimal mungkin
z Bagaimana menerapkan Neural Network Control pada plant (model meriam) yang telah dibuat.
Batasan
Batasan Masalah Masalah (1) (1)
z Hanya membahas pengendalian gerakan motor meriam saja :
{Gerakan elevasi mulai sudut -10° s/d 75°.
{Gerakan training mulai sudut ± 120°
dengan sudut 0° berada ditengah-tengah.
z Tidak membahas proses akurasi
penembakan (perhitungan kecepatan kapal maupun target dan TOF).
z Tidak menggunakan simulasi radar.
Batasan
Batasan Masalah Masalah (2) (2)
z Masukan/input meriam dari keyboard
dengan meng-entry data sudut training dan sudut elevasi.
z Gangguan berupa pitch dan roll diperoleh dari gerakan platform bergerak yang
dikenakan pada meriam.
z Tidak memperhitungkan gerak relatif
platform meriam dan pergerakan sasaran.
z Platform yang bergerak terletak pada media diam, sehingga tidak memperhitungkan
arah dan kecepatan kapal.
Tujuan Tujuan
Mengimplementasikan Neural Network Control pada plant (model laras meriam), sehingga
gerakan sudut training dan elevasi (pitch dan roll) dapat dikendalikan pergerakannya dalam pencapaian set point / posisi sudut yang
diharapkan.
zPendahuluan
zKajian Pustaka & Dasar Teori zMetode Penelitian
zSimulasi dan Analisis
zKesimpulan
Kajian Pustaka
z Neural network digunakan sebagai pengontrol keputusan kepada robot untuk bertindak. Robot sebagai sebuah sistem (agent) harus bertindak
sesuai dengan kondisi dan lingkungan serta harus melakukan tugas sesuai dengan yang diberikan.
Oleh karena itu, robot harus memiliki learning dan kemampuan berevolusi pada lingkungan yang
dinamis (Lee dkk 2003).
z Proses pembelajaran pada neural network dengan metode backpropagation untuk mendapatkan nilai pembobot beban yang berbeda-beda, yang
hasilnya dilakukan koordinasi sistem dengan masing-masing motor (Dedid CH, 2003)
Prinsip
Prinsip Kerja Kerja Meriam Meriam
Backpropagation Neural Network
Start
Inisialisasi pembobot dengan nilai random
Feedforward dari algoritma backpropagation
Error dari backpropagation
Update pembobot
Menghitung error pada tiap training yang dilakukan
E≤Et Atau N≥N max
Stop
No
Yes
Diagram Alir
Backpropagation
Neural Network
zPendahuluan
zKajian Pustaka & Dasar Teori zMetode Penelitian
zSimulasi dan Analisis
zKesimpulan
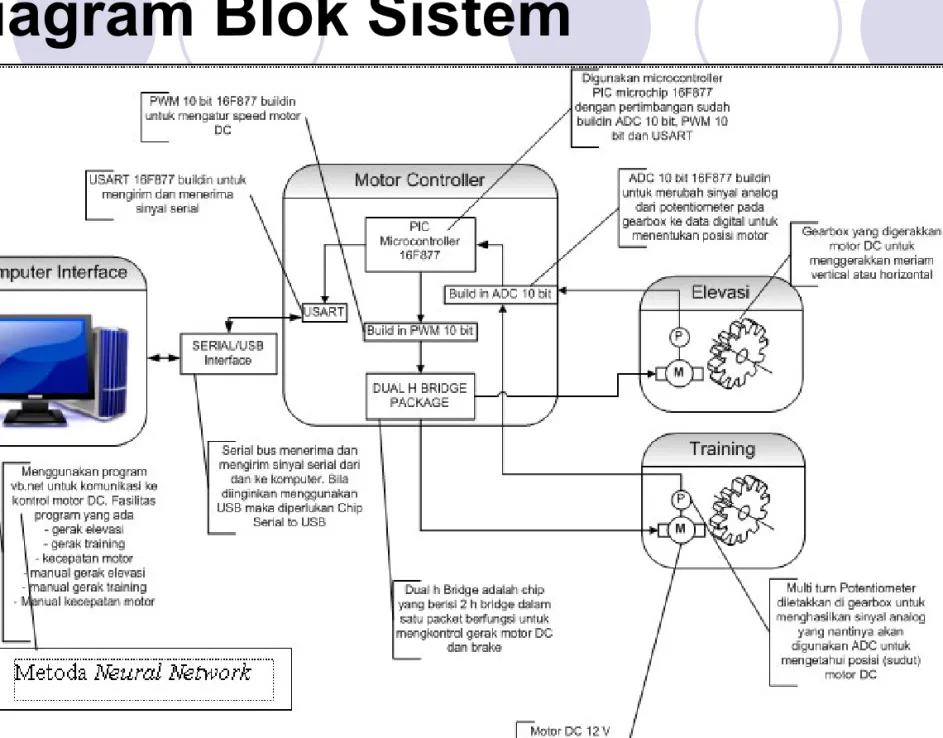
Diagram Blok Sistem
Model Miniatur Meriam
Model Meriam pada Platform yang
Bergerak
Diagram Blok Tanpa Koordinasi
Struktur Neural Network pada Sistem (1)
Desain Struktur Kontroler Gerakan Training
Struktur Neural Network pada Sistem (2)
Desain Struktur Kontroler Gerakan Elevasi
Diagram Blok Pembelajaran Awal
Kontroler Gerakan Training dan Elevasi
Training
Elevasi
Perubahan Perputaran Training dan Elevasi Meriam
Kinematika pada meriam diilustrasikan sebagai
rotasi pada sumbu x, y, z untuk menentukan
koordinasi gerakan
training dan elevasi pada
laras meriam yang
bergerak setiap saat.
zPendahuluan
zKajian Pustaka & Dasar Teori zMetode Penelitian
zSimulasi dan Analisis
zKesimpulan
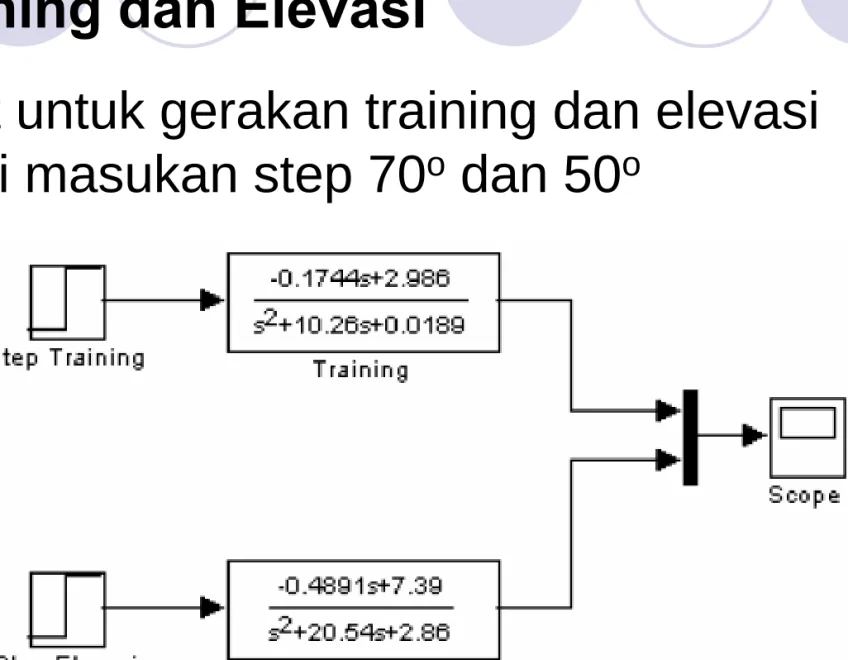
Diagram Blok Loop Terbuka Gerakan Training dan Elevasi
Plant untuk gerakan training dan elevasi
diberi masukan step 70
odan 50
oRespon Loop Terbuka
Model Simulasi Gerakan Training
Model Simulasi Gerakan Elevasi
Respon Learning Neural Network Gerakan Training & Elevasi dengan λ = 0.4
Training Elevasi
Respon Kontroler dari Tiap Sudut Gerakan Training dan Elevasi
0 1 2 3 4 5 6 7 8 9 10
-100 -80 -60 -40 -20 0 20 40 60 80 100
Waktu
Sudut (deg)
Training 75 Training -75 Training 85 Training -85 Training 50 Training -50
0 1 2 3 4 5 6 7 8 9 10
-50 -40 -30 -20 -10 0 10 20 30 40 50
Waktu
Sudut (deg)
Elevasi 45 Elevasi -45 Elevasi 30 Elevasi -30
Training Elevasi
Respon Gerakan Training dan Elevasi Diberikan Gangguan
340 360 380 400 420 440 460 480 500
-1.5 -1 -0.5 0 0.5 1 1.5
Plant Training Sinyal Kontrol Output Training
300 320 340 360 380 400 420 440 460 480 500
-1.5 -1 -0.5 0 0.5 1 1.5
Plant Elevasi Sinyal Kontrol Output Elevasi
Training Elevasi
Perancangan Meriam terhadap Sasaran
Respon Implementasi Koordinasi (1)
Respon Implementasi Koordinasi (2)
Respon 3 Dimensi Koordinasi (1)
5 10 15 20 25 30 35 40
0 10 20 30
0 5 10 15 20 25 30 35
X Y
Z
Respon 3 Dimensi Koordinasi (2)
-40 -20
0 20
40 -40
-20
0
20
40 -40
-30 -20 -10 0 10 20 30 40
x axis Transparent Sphere
y axis
z axis
zPendahuluan
zKajian Pustaka & Dasar Teori zMetode Penelitian
zSimulasi dan Analisis
zKesimpulan
Kesimpulan
z Semakin kecil nilai parameter learning rate pada saat proses pembelajaran awal, hasil respon yang
didapatkan semakin baik dimana plant dapat mengikuti model kontroler tetapi waktu yang dibutuhkan untuk
proses pembelajaran awal semakin lama.
z Neural network merupakan kontroler cerdas yang diterapkan pada sistem gerakan training dan elevasi pada meriam dan dapat mengendalikan gerakan laras meriam pada posisi tepat walaupun terdapat
gangguan pitch dan roll dari platform yang bergerak.
z Sistem koordinasi dapat mengembalikan posisi gerakan walaupun terdapat gangguan yang
menyebabkan adanya perubahan posisi sudut gerakan training dan elevasi dengan adanya pitch dan roll pada platform yang bergerak.