Diajukan untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Disusun oleh :
YOHANES SINUNG NUGROHO NIM : 025114071
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
2007
Presented as Partial Fulfillment of the requirements To Obtain the Sarjana Teknik Degree
In Electrical Engineering
By :
YOHANES SINUNG NUGROHO Student ID Number : 025114071
ELECTRICAL ENGINEERING STUDY PROGRAM
ELECTRICAL ENGINEERING DEPARTMENT
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
2007
ini tidak memuat karya atau bagian orang lain, kecuali yang telah disebutkan dalam
kutipan dan daftar pustaka, sebagaimana layaknya karya ilmiah.
Yogyakarta, Oktober 2007
Penulis
^âÑxÜáxÅut{tÇ~tÇ àâztá t~{|Ü |Ç| M
Pada
”
Tuhan Yesus Kristus”
atas hidup, talenta, penyertaan,mukjizat dan penebusan-Nya yang selama ini menyertai langkahku.
Untuk bapak
“Andhi Suhardi”
ibu“Mariyani”
atas dukungan,doa dan bimbingan yang tiada henti, pembelajaran atas hidup dan kasih yang selama
ini aku terima.
Untuk kakakku dan adikku
“Mas Nanang, Mbak Lena, Adikku
Bintang”
atas dorongan semangat dan nasehat serta terimakasih untuk segalayang telah engkau berikan. Yang kita perlukan hanyalah kebersamaan kita, dengan
itu kita bisa melalui segalanya.
Ê]|~t lxáâá `xÇz{xÇwt~|?
à|wt~ twt çtÇz à|wt~ ÅâÇz~|Ç
w| wâÇ|t |Ç|Ê
JAM PASIR DIGITAL BERBASIS
MIKROKONTROLER AT89S51
Nama : Yohanes Sinung Nugroho NIM : 025114071
INTISARI
Jam pasir digital berbasis mikrokontroler merupakan jam pasir elektronik, yang cara kerja dan tampilannya seperti jam pasir manual. Jam pasir digital ini menggunakan 32 led sebagai penampil yang tersusun dalam 10 baris. Dan 2 seven segmnent sebagai penampil pengaturan waktu tunda.
Pengendali jam pasir ini menggunakan mikrokontroler sebagai perangkat yang bertugas untuk menentukan keputusan-keputusan selama proses pengendali berjalan. Proses pengendali dilakukan untuk menentukan tunda waktu dan penyalaan led. Dalam jam pasir digital ini menggunakan seven segment untuk menampilkan informasi, yakni besarnya tunda waktu. Mikrokontroler yang digunakan adalah AT89S51, yang dalam proses komunikasi dengan komponen-komponen yang lain menggunakan komunikasi secara paralel.
Alat jam pasir digital yang telah dikerjakan ini dapat bekerja sesuai dengan proses pengendalian yang diharapkan. Penundaan pada alat jam pasir digital ini, dapat diatur dari rentang waktu 00 menit sampai 60 menit.
Kata kunci : jam pasir, led, mikrokontroler, tunda waktu
ABSTRACT
Digital sand clock based on microcontroller is electronic sand glass, that is the appearance and operational of like manual sand glass. this digital sand clock apply 32 led as display is structured in 10 line. And 2 seven segmnent as display delay timing.
This controller of sand clock uses microcontroller as peripheral with the task that is used to determine decisions during processing of controller are run. Controller processing is purpose to determine the time delay and active the led. In this digital sand clock uses seven segments for presenting information, which the levels of time delay. AT89S51 is a microcontroller that used, in process of communications with other components using parallel communications.
The device of digital sand clock can work according to the expected operation process. Delay in this digital sand clock device, can be arrange from time stretch of 00 minute until 60 minutes.
Keyword: sand clock, led, microcontroller, time delay
KATA PENGANTAR
Terima kasih Tuhan Yesus Kristus, sehingga perancangan dan penyusunan
tugas akhir JAM PASIR DIGITAL ini dapat terselesaikan dengan baik.
Tugas akhir ini bertujuan untuk memenuhi salah satu syarat untuk
memperoleh gelar sarjana Teknik, jurusan Teknik Elektro Universitas Sanata
Dharma
Dalam penyusunan tugas akhir ini, banyak sekali bimbingan, saran dan
masukan yang sangat bermanfaat bagi penulis yang telah diberikan oleh berbagi
pihak demi terselesainya penyusunan tugas akhir ini.
Untuk itu dengan segala kerendahan hati, penulis mengucapkan banyak
terima kasih kepada :
1. Romo Ir. Greg. Heliarko, S.J., S.S., B.S.T., M.A., M.Sc., selaku dekan
Fakultas Sains dan Teknologi.
2. Bapak A. Bayu Primawan, S.T., M.Eng., selaku ketua Jurusan Teknik
Elektro.
3. Ibu B. Wuri Harini, S.T., M.T., selaku dosen pembimbing I yang telah
meluangkan waktunya untuk memberikan bimbingan, masukan, dorongan
dan bantuan, sehingga penulis dapat menyelesaikan tugas akhir ini.
4. Bapak Ir. Tjendro selaku dosen pembimbing II atas bimbingan, ide-ide
dan bantuannya sehingga penulis dapat menyelesaikan tugas akhir ini.
5. Ayahku Andhi Suhardi dan Ibuku Mariyani yang telah memberikan kasih
dan sayangnya, doa, dorongan, semangat. Terima kasih buat segala yang
telah engkau berikan.
6. Buat Mas Nanang, Mbak Magdalena yang membiayai Kuliahku
7. Teman-teman, Wawan (T-cuz) ”Terima kasih buat semua bantuan yang
sudah kamu berikan”, Oscar ”Terima kasih buat Pentium II-nya”.
8. Teman-teman bimbingan Ibu Wuri ”Hary, Yoga, Ido, Doni (Lele), Anton
(Plentonx), Memen, Gepeng, Deni (Chino), Dhanny, Deri, Andhex”.
9. Teman-teman elektro 2002 : ”Robi, Andi S, Dhika, Pandu, Andreas
(Bule)”
10.Teman-teman kost JMC ”Made, Endhok, Agung, Koko, Yuli, Andhek,
Broto, Lambang”.
11.Teman-teaman kost Tangkadas ”Franky, Heri, Fandy, Purba, Si Boss”.
12.Segenap dosen-dosen Teknik Elektro atas segala bantuan yang telah
diberikan selama penulis menimba ilmu di bangku kuliah.
13.Laboran teknik elektro : Mas Suryono, Mas Mardi dan Mas Broto.
14.Segenap Karyawan, Sekretariat Teknik, atas bantuan yang telah
diberikan.
Dan semua pihak yang tidak dapat disebutkan satu persatu, karena
keterbatasan tempat, atas saran, ide, dan dukungannya yang telah diberikan hingga
tugas akhir ini terselesaikan.
Yogyakarta, Oktober 2007
DAFTAR ISI
HALAMAN JUDUL... i
HALAMAN JUDUL... ii
HALAMAN PENGESAHAN... iii
HALAMAN PERNYATAAN KEASLIAN KARYA... v
HALAMAN MOTTO DAN PERSEMBAHAN... vi
INTISARI... vii
ABSTRACT... viii
KATA PENGANTAR... ix
DAFTAR ISI... xii
DAFTAR GAMBAR... xvi
DAFTAR TABEL... xviii
DAFTAR LAMPIRAN... xix
BAB I PENDAHULUAN... 1
1.1 Judul ... 1
1.2 Latar Belakang ... 1
1.3 Batasan Masalah ... 2
1.4 Tujuan ... 2
1.5 Metode Penelitian ... 3
BAB II DASAR TEORI... 4
2.1 Mikrokontroler ... 4
2.1.1 Arsitektur Mikrokontroler AT89S51 ... 4
2.1.2 Oganisasi Memori AT89S51 ... 7
2.1.2.1 Memori Program ... 8
2.1.2.2 Memori Data ... 9
2.1.2.3 Ram Internal... 10
2.1.2.4 Tabel Tengok (Look Up Table)... 11
2.1.2.5 Intruksi-intruksi Register Khusus ... 12
2.1.3 Mode Pengalamatan ... 13
2.1.4 Timer dan Counter dalam AT89S51 ... 14
2.1.4.1 Sarana Timer/Counter AT89S51... 15
2.1.4.2 Mode Kerja Timer 0 dan Timer 1... 16
2.1.4.3 Register Pengatur Timer... 18
2.1.5 Sistem Interupsi pada AT89S51... 20
2.1.5.1 Struktur Interupsi ... 20
2.1.5.2 Mengaktifkan dan Menon-Aktifkan Interupsi .... 21
2.1.5.3 Tingkat Prioritas Interupsi... 21
2.1.5.4 Teknik Polling... 22
2.1.5.5 Pemrosesan Interupsi ... 22
2.1.5.6 Vektor-Vektor Interupsi ... 23
2.1.5.7 Perancangan Program Interupsi ... 23
2.2 Transistor Sebagai Saklar... 24
2.3 Seven Segment... 26
2.4 Decoder BCD... 27
2.5 LED (Light Emitting Diode) sebagai Penampil ... 29
BAB III PERANCANGAN... 30
3.1 Diagram Blok Rangkaian... 30
3.2 Perancangan Rangkaian ... 31
3.2.1 Rangkaian Switch... 32
3.2.2 Pangkaian Unit Pengolah ... 33
3.2.3 Rangkaian Indikator ... 34
3.2.4 Rangkaian Tampilan Seven Segment... 37
3.3 Perancangan Software... 39
3.3.1 Diagram Alir Program Menyalakan Led (Flowchart) ... 42
3.3.2 Diagram Alir (Flowchart) Panggil Proses Tombol... 43
3.3.3 Diagram Alir (flowchart) Penampil Waktu pada Seven Segment... 44
3.3.4 Diagram Alir (flowchart) Pemberian Tunda pada Aliran Led... 46
BAB IV HASIL PENGAMATAN DAN PEMBAHASAN... 48
4.1 Prinsip Kerja ... 48
4.2 Pengamatan Perpindahan Aliran Led... 49
4.3 Pengamatan Tunda Waktu ... 50
4.4 Pengamatan Tiap Rangkaian... 54
4.4.1 Rangkaian Tombol ... 54
4.4.2 Rangkaian Led ... 54
4.4.3 Rangkain Seven Segment... 57
4.5 Pembahasan Program ... 57
4.5.1 Subroutine Pengaturan Tunda ... 57
4.5.2 Penyalaan Led ... 58
4.5.3 Subroutine Cek Tombol ... 59
4.5.4 Subroutine Tampilan pada Seven Segment... 61
4.5.5 Subroutine Tunda Waktu ... 62
BAB V PENUTUP... 66
5,1 Kesimpulan ... 66
5.2 Saran... 66
DAFTAR PUSTAKA... 67
DAFTAR GAMBAR
Gambar 2.1 Blok Diagram AT89S51 ... 5
Gambar 2.2 Peta Memori Interupsi... 8
Gambar 2.3 Susunan Bit dalam Register TMODE ... 18
Gambar 2.4 Susunan Bit dalam Register TCON ... 18
Gambar 2.5 Jenis Transistor dan Simbol Transistor ... .. 24
Gambar 2.6 Rangkaian Skema Dasar Konfigurasi Saklar Menggunakan transistor... 24
Gambar 2.7 Seven segment... 26
Gambar 2.8 Seven Segment Common Anode... 26
Gambar 2.9 Seven Segment Common Catode... 26
Gambar 2.10 Simbol IC 7447 ... 27
Gambar 2.11 Tampilan Seven Segment Menggunakan IC 7447... 28
Gambar 2.12 Fisik LED ... 29
Gambar 3.1 Diagram Blok Rangkaian... 30
Gambar 3.2 Layout Jam Pasir Digital ... 31
Gambar 3.3 Rangkaian Switch... 32
Gambar 3.4 Rangkaian mikrokontroler ... 33
Gambar 3.5 Rangkaian Cuplikan dari Rangkaian LED Indikator ... 34
Gambar 3.6 Rangkaian LED Indikator ... 36
Gambar 3.7 Rangkaian Penampil Waktu pada Seven Segment... 37
Gambar 3.8 Pergerakan Led... 41
Gambar 3.9 Flowchart Program Utama... 42
Gambar 3.10 Flowchart Panggil Proses Tombol... 43
Gambar 3.11 Flowchart Penampil Waktu pada Seven Segment... 45
Gambar 3.12 Flowchart Pemberian Tunda Waktu pada Aliran Led ... 46
Gambar 4.1 Layout Jam Pasir Digital ... 48
Gambar 4.2 Perpindahan Aliran Led dengan Tunda Waktu 3 menit... 49
DAFTAR TABEL
Tabel 2.1 Fungsi Alamat Interupsi... 8
Tabel 2.2 Instruksi Membaca Tabel Tengok... 11
Tabel 2.3 Tingkat Prioritas Interupsi... 22
Tabel 2.4 Vektor-Vektor Interupsi ... 23
Tabel 2.5 Tabel Kebenaran IC 7447 ... 28
Tabel 4.1 Data Pengamatan Tunda Waktu... 50
Tabel 4.2 Data Pengamatan Waktu Tunda Tiap Baris Led... 51
Tabel 4.3 Data Pengamatan Rangakain Tombol... 54
Tabel 4.4 Data Pengamatan Tegangan pada Transistor ... 55
Tabel 4.5 Data Masukan untuk Port 1 dan Port 2 ... 58
Tabel 4.6 Hubungan antara Data Biner dengan Led ... 58
Tabel 4.7 Data Perbandingan Waktu Tunda dengan Seven Segment... 60
LAMPIRAN
Datasheet ... L1
Listing Program... L2
Rangkaian Lengkap Jam Pasir Digital ... L7
1.1 Judul
Jam Pasir Digital Berbasis Mikrokontroler AT89S51
1.2 Latar Belakang
Dengan semakin pentingnya arti sebuah waktu, maka manusia mulai mencari
cara untuk meminimalisasi atau mengatur waktu seefisien mungkin dengan berbagai
cara untuk memperoleh kinerja yang baik dengan waktu yang relatif singkat dan
tepat waktu atau dengan istilah lain yaitu Time Is Money. Salah satu cara untuk mewujudkan efisiensi waktu ini adalah menggunakan sebuah jam yang diberi nama
sebagai Jam Pasir. Jam Pasir berbeda dengan jam biasa yang umumnya digunakan
sehari-hari.
Jam pasir banyak diaplikasikan pada perusahaan-perusahaan yang
menawarkan jasa makanan siap saji atau dikenal dengan istilah Fast Food. Penggunaan jam pasir ini sangat diperlukan untuk menghasilkan pelayanan yang
cepat dan efisien, selain dapat digunakan untuk beberapa aplikasi lain misalnya untuk
penghitungan waktu pada saat melaksanakan ujian praktek atau kolokium. Untuk
mewujudkan hal ini, salah satunya dibuat sebuah Jam Pasir elektronik yang
menggantikan sistem jam pasir yang manual ke sistem yang lebih modern.
Alasan lain pembuatan dari jam pasir elektronik ini dapat juga dijadikan
sebagai materi bahan praktikum mikrokontroler. Keuntungan selain sebagai bahan
materi praktikum adalah :
1. Dapat mengatur waktu yang dibutuhkan pasir untuk berpindah dari tabung LED
satu ke tabung LED yang lain.
2. Dapat juga dijadikan sebagai hobi elektronik.
1.3 Batasan Masalah
Mengingat akan banyaknya jenis-jenis jam yang dihasilkan dan dibuat oleh
manusia yang mempunyai fungsi dan aplikasi berbeda, maka penulis perlu
memberikan suatu batasan agar ruang lingkup dari pembahasan masalah tidak terlalu
luas pembahasannya. Pembatasan masalah hanya didasarkan dari penggunaan dan
pengaturan.
1. Waktu jam pasir berbasis Mikrokontroller AT89C51.
2. Menggunakan 32 buah LED sebagai penampil.
3. Menggunakan setting waktu counter up atau counter down.
4. Menggunakan 2 buah seven segment untuk menampilkan setting menit.
1.4 Tujuan
Tujuan utama dalam pembuatan jam pasir ini adalah untuk menerapkan dan
merealisasikan sebagian dari pengetahuan mengenai sistem pemrograman yang telah
dipelajari sebelumnya selama kuliah. Disamping itu, tujuan yang lain yang ingin
dicapai adalah untuk membuat sistem pemrograman jam pasir yang sebelumnya
Adapun tujuan pembuatan alat sebagai tugas akhir ini untuk memenuhi
persyaratan akademis dalam menyelesaikan pendidikan sarjana Strata-1 (S1) pada
jurusan Teknik Elektro Universitas Sanata Dharma.
1.5 Metode Penelitian
Metode yang digunakan dalam penyusunan Tugas Akhir ini dilakukan
dengan beberapa tahap yaitu :
1. Observasi, pengumpulan data-data melalui pembacaan buku-buku teori
pendukung tugas akhir di perpustakaan USD. Selain itu melalui
informasi-informasi dan keterangan-keterangan dari internet, dosen pembimbing tugas
akhir dan teman-teman.
2. Perancangan, penyediaan seluruh komponen yang dibutuhkan selanjutnya
merakit dan membuat alat.
3. Pengujian dan pengetesan alat yaitu menguji secara langsung cara kerja alat
kemudian mengumpulkan data-datanya dan menyusunnya sebagai data hasil
akhir dalam laporan tugas akhir.
4. Kesimpulan, yaitu menganalisa secara keseluruhan hasil kerja alat kemudian
mengambil kesimpulan dari data-data yang didapat.
2.1. Mikrokontroler.
Mikrokontroler sebagai suatu terobosan teknologi mikroprosesor dan
mikrokomputer, hadir memenuhi kebutuhan pasar dan teknologi baru. Sebagai
teknologi baru, yaitu teknologi semikonduktor dengan kandungan transistor yang
lebih banyak namun hanya membutuhkan ruang kecil serta dapat diproduksi secara
massal (dalam jumlah banyak) sehingga harganya menjadi lebih murah
(dibandingkan mikroprosesor). Sebagai kebutuhan pasar, mikrokontroler hadir untuk
memenuhi selera industri dan para konsumen akan kebutuhan dan keinginan alat-alat
bantu dan mainan yang lebih baik dan canggih. Dengan alasan demikian
mikrokontroler banyak digunakan oleh berbagai kepentingan untuk menciptakan
suatu kreasi elektronika yang beraneka ragam.
2.1.1. Arsitektur Mikrokontroler AT89S51.
Blok diagram lengkap dari Mikrokontroler AT89S51 seri AT89 (Keluarga
51) Atmel akan diperlihatkan secara jelas pada Gambar 2.1:
Bagian-bagian dari blok diagram diatas dapat dijelaskan sebagai berikut :
a. Register A.
Register A (akumulator) yang menempati lokasi pada alamat E0h digunakan sebagai register untuk penyimpanan data sementara dalam program, instruksinya
mengacu sebagai register A.
Gambar 2.1 Blok Diagram AT89S51 [1]
b. Register B.
Register B (lokasi F0h) digunakan selama operasi perkalian dan pembagian,
c. Program Status Word (PSW).
Register PSW (lokasi D0h) mengandung informasi status program.
d. Stack Pointer.
Register Stack Pointer (SP) pada lokasi 81h merupakan register dengan
panjang 8-bit, digunakan dalam proses simpan dan ambil dari/ke stack. Nilainya akan dinaikkan sebelum data disimpan menggunakan intruksi PUSH dan CALL. Walau
Stack bisa menempati lokasi di mana saja dalam RAM, register SP akan selalu diinisialisasikan ke 07h setelah adanya reset, hal ini menyebabkan stack berawal di lokasi 08h.
e. Data Pointer.
Register Data Pointer atau DPTR mengandung DPTR untuk byte tinggi (DPH) dan byte rendah (DPL) yang masing-masing berada di lokasi 83h dan 82h, bersama-sama membentuk register yang mampu menyimpan alamat 16 bit. Dapat
dimanipulasi sebagai register 16-bit atau sebagai dua register 8-bit yang terpisah.
f. Port 0, Port 1, Port 2, dan Port 3.
P0, P1, P2 dan P3 masing-masing menempati lokasi 80h, 90h, A0h dan b0h
merupakan pengunci-pengunci (latches), yang digunakan untuk menyimpan data yang akan dibaca atau ditulis dari/ke port, masing-masing Port 0, Port 1, Port 2 dan
Port 3.
g. Serial DataBuffer.
dikirim ke penyangga pengirim dan sekaligus mengawali transmisi data serial,
sedangkan pada saat data disalin dari SBUF, maka sebenarnya data tersebut berasal
dari penyangga penerima.
h. Timer Register.
Pasangan register-register (TH0, TL0) di lokasi 8Ch dan 8Ah, (TH1, TL1)
dilokasi BDh dan 8Bh serta (TH2, TL2) di lokasi CDh dan CCh merupakan
register-register pencacah 16-bit untuk masing-masing Timer 0, Timer 1 dan Timer 2.
i. Capture Register.
Pasangan register (RCAP2H, RCHP2L) yang menempati lokasi CBh dan
CAh merupakan register Capture untuk mode Timer 2 capture. Pada mode ini, sebagai tanggapan terjadinya suatu transisi sinyal di kaki (pin) T2EX (pada
AT89C52/55), TH2 dan TL2 disalin masing-masing ke RCAP2H dan RCP2l. Timer 2 juga memiliki mode isi ulang otomatis 16-bit dan RCAP2H serta RCAP2L digunakan untuk menyimpan nilai isi ulang tersebut.
j. Control Register.
Register-register IP, IE, TMOD, TCON, T2CON, T2MOD, SCON dan
PCON berisi bit-bit kontrol dan status untuk sistem interupsi, Pencacah/Pewaktu dan
port serial yang akan dijelaskan nanti.
2.1.2. Oganisasi Memori AT89S51.
Mikrokontroler AT89S51 memiliki ruang alamat memori data dan program
yang terpisah. Pemisahan memori program dan data tersebut membolehkan memori
disimpan dan dimanipulasi oleh CPU 8-bit. Walaupun demikian, alamat memori data
16-bit bisa juga dihasilkan melalui register DPTR.
2.1.2.1 Memori Program.
Pada Gambar 2.2 dibawah ini ditunjukkan pemetaan bagian bawah dari
memori program. Setelah reset, CPU segera mengerjakan program mulai dari lokasi
0000h.
Gambar 2.2 Peta Memori Interupsi [1]
Tabel 2.1 Fungsi Alamat Interupsi [1] Alamat Fungsi Interupsi
0000h Reset 0003h Interupsi Internal 0 000Bh Timer 0 0013h Interupsi Internal 1 001Bh Timer 1
0023h Port Serial 0033h Timer 2
Sebagaimana ditunjukkan pada Gambar 2.2 di atas, masing-masing interupsi
diletakkan pada lokasi yang sudah tetap dalam memori program. Sebuah interupsi
menyebabkan CPU melompat ke lokasi interupsi yang bersangkutan, yaitu letak dari
lokasi 0003h, jika interupsi digunakan, maka layanan rutin interupsi ini harus
dituliskan pada lokasi ini, jika tidak, maka lokasi tersebut bisa dipakai sebagai
memori program serba guna. Untuk lebih jelas perhatikan tabel 2.1.
Lokasi-lokasi layanan interupsi tersebut menempati lokasi-lokasi dengan
jarak 8-byte : 0003h untuk eksternal interupt 0, 000Bh untuk timer 0, 0013h, untuk
Eksternal Interupt 1, 001Bh untuk timer 1 dan seterusnya. Jika suatu rutin layanan interupsi sangat pendek (kurang dari 8 byte), maka seluruh rutin bisa disimpan pada lokasi yang bersangkutan (sesuai dengan interupsi yang digunakan). Jika terlalu
panjang (lebih atau sama dengan 8-byte), maka harus digunakan suatu perintah lompat ke lokasi rutin interupsi yang sebenarnya (dilokasi lain dalam memori
program).
2.1.2.2 Memori Data.
Memori data dapat berupa memori data internal dan memori data eksternal. kita dapat menentukan memori data eksternal hingga 64K byte. Alamat memori data
eksternal bisa 1 atau 2 byte. Alamat satu byte sering digunakan untuk membantu satu atau lebih jalur I/O dalam penghalamanan RAM. Alamat dua byte dapat dipakai dalam kasus jika byte alamat tinggi dikirim melalui port 2. Memori data internal memiliki ruang memori dibagi menjadi tiga blok, yang dikenal sebagai 128 bawah
(lower 128), 128 atas (upper 128) dan register fungsi khusus (Special Function Register = SFR).
Alamat memori data internal selalu 8-bit atau 1-byte, yang konsekuensinya hanya mampu mengalamati hingga 256 byte saja. Namun demikian, mode-mode
Pengaksesan langsung (direct addressing) dengan alamat diatas 7Fh mengakses suatu memori, sedangkan pengaksesan tak langsung (indirect addressing) dengan alamat di atas 7Fh mengakses ruang memori lain yang berbeda. Sehingga terlihat 128
atas dan SFR menempati blok yang sama, 80h hingga FFh, walaupun secara fisik
terpisah.
RAM Internal yang memiliki 128-byte dipetakan. 32 byte bawah dikelompokkan menjadi 4 bank dan 8 register (R0 hingga R7). Dua bit pada PWS
(Program Status Word) digunakan untuk memilih kelompok register mana yang digunakan. Arsitektur ini membolehkan penggunaan ruang kode secara lebih efisien,
karena instruksi-intruksi register lebih pendek dari pada instruksi-instruksi yang
menggunakan pengalamatan langsung. 16 byte berikutnya, di atas bank-bank register membentuk suatu blok ruang memori yang bisa teralamati per bit. Kumpulan
instruksi mikrokontroler ini memiliki berbagai pilihan instruksi- instruksi bit tunggal
dan instruksi-instruksi ini mampu secara langsung mengalamati 128 bit dalam area
ini. Alamat-alamat bit ini adalah 00h hingga 7Fh. Semua byte yang berada didalam 128 bawah dapat diakses baik secara langsung maupun tidak langsung. Bagian 128
atas dari RAM hanya ada di dalam piranti yang memiliki RAM berukuran 256 byte.
2.1.2.3. Ram Internal.
Instruksi MOV <tjn>, <sbr> membolehkan data dipindah-pindah antar lokasi
dalam RAM internal atau lokasi-lokasi SFR tanpa melalui akumulator. Perlu dicatat
PUSH dan POP hanya menggunakan pengalamatan langsung untuk mengidentifikasi
byte yang disimpan atau dikembalikan (ditarik dari ruang Stack), jika diimplementasikan lokasinya dapat mencapai 128 (upper 128) atas tetapi tidak mengganggu ruang SFR.
Jika piranti mikrokontroler yang digunakan tidak melakukan implementasi
bagian 128 atas dan SP akan menunjuk pada lokasi di 128 atas tersebut, maka data
byte yang di PUSH akan hilang serta instruksi POP menjadi tidak menentu.
Instruksi-instruksi transfer data mencakup sebuah instruksi MOV 16 bit
(MOV DPTR,# data 16) yang dapat digunakan untuk inisialisasi DPTR dalam
penggunaan Tabel Tengok atau look-up-tabel dalam memori program atau untuk akses data eksternal 16-bit.
2.1.2.4. Tabel Tengok (Look Up Table)
Pada Tabel 2.2 di bawah ini memperlihatkan dua instruksi yang dapat
digunakan membaca tabel tengok yang tersimpan dalam memori program.
Tabel 2.2 Instruksi Membaca Tabel Tengok [1]
Intruksi Fungsi Waktu Eksekusi (µd)
MOV A,@A+DPTR Baca memori program dilokasi (A+DPTR)
2 MOV A,@A+PC Baca memori program dilokasi (A+PC) 2
Karena kedua instruksi ini hanya mengakses memori program saja, maka
Instruksi MOVC yang pertama pada tabel di atas mampu mengakomodasi
sebuah tabel dengan 256 entri, dengan indeks atau nomor baris 0 hingga 255. Angka
indeks yang diinginkan disimpan dalam akumulator dan DPTR di set menunjuk ke alamat lokasi awal tabel yang bersangkutan. Dengan demikian perintah MOVC
A,@A+DPTR digunakan untuk menyalin entri tabel yang dikehendaki ke dalam
akumulator. Instruksi MOVC yang satunya juga sama, hanya saja menggunakan PC
sebagai alamat dasarnya (bukan DPTR).
Biasanya tabel tengok diakses dalam suatu subrutin, pertama kali angka indeks entri tabel tengok yang akan dibaca disimpan dalam akumulator, kemudian
subrutin yang terkait dipanggil misalnya : MOV A, INDEKS_TABEL
CALL TABEL
Subrutin TABEL bisa berisi sebagai berikut :
TABEL : MOVC A,@A+PC
RET
Pada tabel dituliskan segera setelah instruksi RET (return) dalam memori program. Tipe tabel semacam ini bisa diisi hingga 255 entri, dengan indeks 1 hingga 255. Indeks 0 tidak dapat digunakan, karena pada saat instruksi, PC mengandung alamat dari instruksi RET, dengan demikian indeks 0 akan menunjuk pada instruksi RET tersebut.
2.1.2.5. Intruksi-intruksi Register Khusus.
Bank-bank register, yang masing-masing berisi R0 hingga R7 atau 8 register,
register (000 untuk R0, 001 untuk R1 hingga 111 untuk R7). Pengaksesan register
dengan cara demikian bisa menghemat penggunaan kode instruksi, karena tidak
memerlukan sebuah byte untuk alamat. Saat instruksi tersebut dikerjakan, satu dari delapan register pada bank yang terpilih yang diakses.
Beberapa instruksi hanya dikhususkan untuk suatu register tertentu. Misalnya
suatu instruksi yang hanya bekerja pada akumulator saja. Sehingga tidak
memerlukan alamat byte untuk menunjuk ke akumulator tersebut. Dalam hal ini, op-kodenya sendiri telah mengandung penunjuk ke register yang benar. Instruksi yang
mengacu akumulator sebagai A akan dikodekan dengan op-kode spesifikakumulator.
Tidak semua alamat pada SFR (register fungsi khusus) digunakan, alamat-alamat yang tidak digunakan tidak diimplementasikan pada chip. Jika dilakukan
usaha pembacaan pada alamat-alamat yang tidak terpakai tersebut akan
menghasilkan data acak dan penulisannya tidak menimbulkan efek sama sekali.
Pengguna perangkat lunak sebaiknya jangan menuliskan “1” pada lokasi-lokasi ‘tak
bertuan’ tersebut, karena dapat digunakan untuk mikrokontroler generasi selanjutnya.
Dengan demikian, nilai-nilai reset atau non aktif dari bit-bit baru ini akan selalu ‘0’
dan nilai aktifnya adalah ‘1’.
2.1.3. Mode Pengalamatan.
Mode Pengalamatan tak Langsung dalam pengalamatannya, intruksi menentukan suatu register yang digunakan untuk menyimpan alamat operan. Baik RAM internal maupun RAM eksternal dapat diakses secara tak langsung. Register
alamat untuk alamat-alamat 8-bit bisa menggunakan Stack Pointer atau RO atau R1 dari bank register yang dipilih. Sedangkan untuk alamat 16-bit hanya bisa menggunakan register pointer data 16-bit atau DPTR. Beberapa instruksi
menggunakan operan berupa register yang menyimpan alamat data disimpan. Dalam
hal ini digunakan tanda “at” (@) yang dapat digunakan bersama dengan R0, R1,
DPTR atau PC tergantung dari instruksi yang digunakan. Misalnya :
ADD A,@R0
MOVC A,@A+PC
Instruksi pertama menyalin data yang tersimpan di alamat yang ditunjukkan
R0 ke akumulator. Sedangkan instruksi kedua untuk data yang disimpan dalam
@A+PC.
2.1.4. Timer dan Counter dalam AT89S51.
Pada dasarnya sarana masukkan yang satu ini merupakan seperangkat
pencacah biner (binary counter) yang terhubung langsung ke saluran data mikrokontroller, sehingga mikrokontroler bisa membaca kondisi pencacah dan bila
diperlukan mikrokotroler dapat pula merubah kondisi pencacah tersebut.
Seperti layaknya pencacah biner, saat sinyal detak (clock) yang diberikan sudah melebihi kapasitas pencacah, maka pencacah akan memberikan sinyal
register. Selain itu, sinyal detak yang diberikan ke pencacah bisa dikendalikan
dengan mudah.
Sinyal detak yang diberikan ke pencacah dibedakan menjadi 2 macam, yang
pertama adalah sinyal detak yang dengan frekuensi tetap sudah diketahui besarnya
dan yang kedua adalah sinyal detak dengan frekuensi yang bisa bervariasi.
Jika sebuah pencacah bekerja dengan frekuensi tetap, dikatakan pencacah
tersebut bekerja sebagai timer atau pewaktu, karena kondisi pencacah tersebut setara dengan waktu yang bisa ditentukan secara pasti.
Jika sebuah pencacah bekerja dengan frekuensi yamg bervariasi, dikatakan
pencacah tersebut bekerja sebagai counter atau pencacah, kondisi pencacah tersebut menyatakan banyak pulsa detak yang sudah diterima. Untai pencacah biner tersebut
merupakan pencacah biner naik (count up binary counter).
2.1.4.1. Sarana Timer/Counter AT89S51.
Keluarga mikrokontroler AT89S51 dilengkapi dengan dua perangkat
timer/counter, masing-masing dinamakan sebagai Timer 0 dan Timer 1. Perangkat
timer/counter tersebut merupakan perangkat keras yang terpadu dalam SFR. Pencacah biner timer 0 diakses melalui register TL0 (timer 0 low byte, memori data
internal alamat 6Ah) dan register TH0 (timer 0 high byte, memori data internal
alamat 6Ch). Pencacah biner timer 1 diakses melalui register TL1 (timer 1 low byte, memori data internal alamat 6Bh) dan register TH1 (timer 1 high byte, memori data internal alamat 6Dh).
kondisi pencacah berubah dari FFFFh kembali ke 000Fh akan timbul sinyal limpahan
(overflow).
Untuk mengatur kerja timer/counter tersebut digunakan 2 register tambahan yang dipakai bersama oleh timer 0 dan timer 1. Register tambahan tersebut adalah register TCON (timer control register, memori data internal alamat 88h, bisa di alamat per bit) dan register TMOD (timer mode register, memori data internal alamat 89h, tidak bisa di alamati per bit). TL0, TH0, TL1, dan TH1 merupakan SFR
(Special Function Register) yang dipakai untuk membentuk pencacah biner timer 0 dan timer 1. Kapasitas keempat register tersebut masing-masing 8-bit, bisa disusun menjadi 4 macam mode pencacah biner.
2.1.4.2. Mode Kerja Timer 0 dan Timer 1.
Pada mode 0, 1 , dan 2, timer 0 dan timer 1 masing-masing bisa dibuat timer
0 bekerja pada mode 1 dan timer 1 bekerja pada mode 2, atau kombinasi lainnya sesuai dengan keperluan. Sedangkan pada mode 3 TL0, TH0, TL1 dan TH1 dipakai bersama-sama untuk menyusun sistem timer yang terpadu (khusus)
a. MODE 0 – Pencacah Biner 13-bit
Pencacah biner dibentuk dengan TLx (bisa TL0 atau TL1) sebagai pencacah
biner 5 bit (meskipun kapasitas sesungguhnya 8 bit). Limpahan dari pencacah biner
5-bit ini dihubungkan ke THx (bisa TH0 atau TH1) membentuk sebuah untai
pencacah biner 13-bit, limpahan dari pencacah 13-bit ini ditampung di TFx (bisa TF0
b. MODE 1 – Pencacah Biner 16-bit
Mode ini sama dengan mode 0, hanya saja register TLx dipakai sepenuhnya
sebagai pencacah biner 8-bit, sehingga kapasitas pencacah biner yang terbentuk
adalah 16-bit. Seiring dengan sinyal detak, kondisi pencacah biner 16-bit ini dimulai
dari 0000h, 0001h, 0002h, ……, sampai FFFFh, kemudian kembali menjadi 0000h
(pada saat itu terjadi sinyal limpahan atau overflow pada TFx). c. MODE 2 – Pencacah Biner 8-bit dengan Isi Ulang
TLx dipakai sebagai pencacah biner 8-bit, sedangkan THx dipakai untuk
menyimpan nilai yang disisikan ulang TLX setiap kali kondisi TLx melimpah atau
berubah dari FFh menjadi 00h. Dengan cara tersebut bisa diperoleh sinyal overflow
yang frekuensinya bisa ditentukan oleh nilai yang disimpan dalam THx.
d. MODE 3 – Gabungan Pencacah Biner 16-bit dan 8-bit
Pada mode 3 TL0, TH0, TL1 dan TH1 dipakai untuk membentuk 3 rangkaian
pencacah, yang pertama adalah untai pencacah biner 16-bit tanpa fasilitas pemantau
sinyal limpahan atau overflow yang dibentuk dengan TL1 dan TH1. Yang kedua adalah TL0 yang dipakai sebagai pencacah biner 8-bit dengan TF0 sebagai sarana
pemantau limpahan. Pencacah biner ketiga adalah TH0 yang dipakai sebagai
pencacah biner 8-bit dengan TF1 sebagai sarana pemantau limpahan, dengan
demikian TH0 yang mengendalikan interupsi timer 1 (TF1).
Mode 3 biasanya digunakan pada aplikasi yang membutuhkan sebuah timer
masih dapat digunakan oleh port serial untuk menghasilkan baud rate, atau aplikasi apa saja yang tidak membutuhkan interupsi.
2.1.4.3. Register Pengatur Timer.
Register timer digunakan untuk mengatur timer. Register pengatur timer
terdiri dari register TCON dan register TMOD. Register-register tersebut merupakan
register untuk mengatur kerja timer 0 dan timer 1. Perhatikan Gambar 2.3 dan 2.4 di bawah:
TMODE-TIMER MODE REGISTER
Gambar 2.3 Susunan Bit dalam Register TMODE [1] TCON-TIMER CONTROL REGISTER
Register TMOD dan register TCON merupakan register yang digunakan untuk mengatur kerja timer 0 dan timer 1, susunan bit register TMOD dan TCON masing-masing ditunjukkan dalam gambar A dan B. Register TMOD dibagi menjadi
2 bagian secara simetris, bit 0 sampai 3 (TMOD.0 s/d TMOD.3) dipakai untuk
mengatur timer 0, sedangkan bit 4 sampai 7 (TMOD.4 s/d TMOD.7) dipakai untuk mengatur timer 1, penjelasan sebagai berikut :
Bit M0/M1 dipakai untuk menentukan Mode Timer seperti yang ditunjukkan pada tabel digambar 2.3
a. Bit C/T dipakai untuk mengatur sumber sinyal detak yang diberikan ke pencacah
biner. Jika C/T = 0, maka sinyal detak diperoleh dari osilator kristal yang
frekuensinya sudah dibagi 12, sedangkan jika C/T = 1 maka sinyal detak
diperoleh dari kaki T0 (untuk timer 0) atau kaki T1 (untuk timer 1).
b. Bit gate merupakan pengatur saluran sinyal detak. Bila bit GATE = 0, saluran sinyal detak hanya diatur oleh bit TRx (bisa TR0 atau TR1 pada register TCON). Bila bit GATE = 1 kaki INT0 (untuk timer 0) atau kaki INT1 (untuk timer 1) yang dipakai untuk mengatur sinyal detak.
Register TCON dibagi menjadi 2 bagian, 4 bit yang pertama (bit 0 sampai bit 3) dipakai untuk keperluan mengatur kaki INT0 dan INT1. Sisa 4 bit dari register
TCON (bit 4 sampai dengan bit 7) dibagi menjadi 2 bagian secara simetris yang
dipakai untuk mengatur timer 0 / timer 1, sebagai berikut:
a. Bit TFx (TF0 atau TF1) merupakan bit penampung limpahan, TFx akan menjadi
‘1’ setiap kali pencacah biner yang terhubung padanya melimpah atau overflow
dinolkan secara manual dengan instruksi CLR TF0 atau CLR TF1. Jika sarana
interupsi dari timer 0/ timer 1 dipakai, TFx dinolkan saat AT89C51 menjalankan rutin layanan interupsi (ISR-Interupt Service Routine).
b. Bit TRx (TR0 atau TR1) merupakan bit pengatur saluran sinyal detak, bila bit ini
= 0 sinyal detak tidak disalurkan ke pencacah biner sehingga pencacah berhenti
melakukan pencacahan. Bila bit GATE = 1 pada register TMOD, maka saluran sinyal detak ini diatur bersama TRx dan sinyal pada kaki INTO/INT1.
2.1.5. Sistem Interupsi pada AT89S51.
AT89S51 menyediakan 5 sumber interupsi yaitu : dua interupsi internal, dua interupsi Timer dan sebuah interupsi Port serial.
2.1.5.1. Struktur Interupsi.
Interupsi eksternal INT0 dan INT1 dapat dipilih dengan dua macam pilihan:
aktivasi tingkat (level activated) atau aktivasi transisi (trantition activated). Tergantung pada bit IT0 dan IT1 dalam register TCON. Tanda atau flag yang sesungguhnya menghasilkan interupsi ini adalah bit-bit IE0 (TCON.1) dan IE1
(TCON.3) dalam register TCON. Saat rutin layanan interupsi (RL1) dijalankan,
mikrokontroler secara otomatis akan menolkan tanda interupsi terkait asal interupsi
tersebut diaktivasi dengan transisi. Jika aktivasi secara tingkat (level), maka sumber
eksternal-lah yang mengontrol tanda interupsi tersebut.
Interupsi timer 0 dan timer 1 dihasilkan oleh TF0 dan TF1, terjadi pada saat muncul limpahan pada masing-masing timer (kecuali timer 0 pada MODE 3). Saat terjadi interupsi timer, mikrokontroller akan menolkan tanda-tanda tersebut. Interupsi
pengiriman data). Dalam hal ini bit-bit RI dan TI harus dinolkan secara manual
melalui program yang ditulis.(akan dijelaskan pada pasal-pasal berikutnya). Kedua
interupsi port serial ini digabung menggunakan OR. Begitu juga dengan interupsi Timer 2 (TF2) dan masukkan eksternal 2 (EXF2). Hasil dari masing-masing gerbang OR tersebut yang kemudian akan menghasilkan interupsi yang bisa diaktifkan
melalui bit IE.4 untuk RI atau TI dan IE.5 untuk TF2 atau EXF2.
Semua bit yang menyebabkan terjadinya interupsi bisa diset atau dinolkan
melalui perangkat lunak dan hasilnya sama jika dilakukan melalui perangkat keras.
Dengan demikian interupsi bisa dihasilkan maupun dibatalkan melalui program.
2.1.5.2. Mengaktifkan dan Menon-Aktifkan Interupsi
Perhatikan gambar sebelumnya., masing-masing sumber interupsi tersebut
dapat diaktifkan dan dinon-aktifkan sendiri-sendiri dengan mengatur bit-bit yang
terkait dalam register IE (interupt enable) di alamat A8h. Selain pada register IE juga terdapat sebuah bit yang digunakan untuk mengaktifkan dan menon-aktifkan
interupsi secara keseluruhan. Pada AT89C51 bit IE.5 belum terimplementasikan.
2.1.5.3. Tingkat Prioritas Interupsi
Masing-masing interupsi dapat diprogram tingkat prioritas -nya dengan mengatur bit-bit yang terkait pada register IP (alamat B8h). perhatikan gambar
sebelumnya dan tabel 2.3.
prioritas-nya lebih tinggi. Karena hanya ada dua tingkat prioritas, maka interupsi yang prioritas rendah bisa diinterupsi dengan yang prioritas-nya lebih tinggi, sedangkan interupsi dengan prioritas tinggi tidak dapat diinterupsi lagi.
Tabel 2.3 Tingkat Prioritas Interupsi.[1] Bit Simbol Alamat
Bit
Keterangan
(1 = level tinggi, 0 = level rendah
IP7 - -
IP6 - -
IP5 PT2 BDh Prioritas untuk interupsi Timer 2
IP4 PS BCh Prioritas untuk interupsi Port Serial
IP3 PT1 BBh Prioritas untuk interupsi Timer 1
IP2 PX1 Bah Prioritas untuk interupsi Ekternal 1
IP1 PT0 B9h Prioritas untuk interupsi Timer 0
IP2 PX0 B8h Prioritas untuk interupsi Ekternal 0
2.1.5.4. Teknik Polling
Pada saat ada dua interupsi dengan prioritas yang sama muncul bersamaan, maka dilakukan polling untuk menetukan mana yang dilayani terlebih dahulu. Urutan
polling sebagai berikut: eksternal 0, eksternal 1, timer 1, port serial kemudian baru
timer 2.
2.1.5.5. Pemrosesan Interupsi
Saat terjadi interupsi, kemudian diterima CPU didalam mikrokontroller, maka
program akan dihentikan terlebih dahulu kemudian dikerjakan langkah-langkah
penanganan interupsi sebagai berikut :
1. Instruksi yang sedang dikerjakan diselesaikan terlebih dahulu
2. Isi PC (pencacah program) disimpan ke stack
3. Status interupsi yang bersangkutan disimpan ke stack
5. PC kemudian diisi alamat vektor rutin layanan interupsi (RLI) yang bersangkutan
6. RLI dikerjakan.
RLI diakhiri dengan instruksi RETI (bukan RET). Adanya instruksi RETI ini
maka alamat PC yang terakhir yang tersimpan di stack diambil lagi dan status interupsi sebelumnya dikembalikan, sehingga program utama sempat ditinggalkan
dapat diteruskan lagi.
2.1.5.6. Vektor-Vektor Interupsi
Saat suatu interupsi diterima, nilai yang disimpan ke PC sebagai alamat RLI
selanjutnya disebut sebagai vektor interupsi, yang sekaligus merupakan awal alamat
RLI yang bersangkutan. Lihat tabel 2.4
Tabel 2.4 Vektor-Vektor Interupsi [1] Interupsi Tanda Flag Alamat Vektor Reset Sistem RST 0000h
Eksternal IE0 0003h
Timer 0 TF0 000Bh
Eksternal 1 IE1 0013h
Timer 1 TF0 001Bh
Timer 2 TF2 atau EXF2 002Bh Port Serial RI atau TI 0023h
2.1.5.7. Perancangan Program Interupsi
Program yang menggunakan interupsi sebaiknya (disarankan) menggunakan
kerangka sebagai berikut :
1: ORG OH
2: LJMP UTAMA
3: . . . ; letak RLI
4: ORG 30H ; awal program utama
Instruksi diawal program (baris 2) digunakan untuk meloncati lokasi RLI (0h
sampai 2Fh) ke program utama di lokasi 30h, hal ini terkait dengan kenyataan bahwa
mikrokontroller akan memulai menjalankan instruksi di lokasi 0h setelah dihidupkan
atau RESET.
2.2. Transistor Sebagai Saklar.
Komponen transistor juga terbuat dari bahan semikonduktor dengan susunan
pn junction adalah seperti gambar 2.5. Ada dua jenis transistor yaitu jenis NPN dan jenis PNP. Simbol untuk transistor dapat dilihat pada gambar 2.5
Gambar 2.5 Jenis Transistor dan Simbol Transistor. [2]
Gambar 2.6 Rangkaian Skema Dasar Konfigurasi Saklar Menggunakan transistor
Di sini transistor berfungsi sebagai saklar untuk menyalakan LED maupun
seven segment secara bergantian sehingga seakan-akan LED maupun seven segment
terlihat seperti menyala bersamaan. Jika untuk menghidupkan 8 buah seven segment
Port paralel pada AT89S51 tidak mencukupi karena untuk menyalakan 8 buah seven segment membutuhkan 7 Port parallel, sedangkan AT89S51 hanya memiliki 4 Port parallel. Agar transistor bekerja di daerah jenuh dan daerah cuf off, maka dapat dilakukan dengan mengatur Vb dan menentukan tahanan Rb, dan juga tahanan beban
RL. untuk mendapatkan on-off yang bergantian dengan periode tertentu, maka dapat dilakukan dengan memberikan tegangan Vb berupa pulsa.
Apabila Vb = 0, maka transistor off (cut off). Apabila Vb = V1, dan dengan mengatur Rb dan RL sedemikian rupa, sehingga arus Ib yang akan menyebabkan transistor dalam keadaan jenuh (Vce = 0; Vsat = 0.2 Volt).
1. Pada kondisi Vb = 0, harga Ic = 0, berdasarkan persamaan loop:
Vcc + IcR1-Vce.= 0, dihasilkan Vce = +Vcc
2. Pada kondisi Vb = V1, harga Vce = 0 dan Ic = I saturasi (Isat)
Cara penyalaan secara bergantian tersebut dinamakan dengan teknik scanning
dan hanya membutuhkan 2 Port saja, Port 0 digunakan untuk mengirim data karakter yang akan ditampilkan pada seven segment, sedangkan Port 1 digunakan sebagai “saklar” yang menghubungkan antara Vcc dan CA pada seven segment, karena register port 1 (P1) panjangnya 8 bit, maka bisa digunakan untuk “saklar” 8 buah
2.3
Seven Segment
.
Komponen yang sering digunakan sebagai penampil selain LCD adalah
seven segment. Seven segment adalah susunan dari beberapa LED, susunan LED tersebut terdiri dari 7 buah LED untuk menampilkan angka 1 sampai dengan 9 dan 1
buah LED untuk menampilkan titik. Setiap segment diberi nama dengan huruf dari a sampai dengan g, sedangkan untuk menampilkan titik diberi nama dp. Dapat dilihat
pada gambar 2.7.
Gambar 2.7 Seven Segment. [6]
Terdapat dua jenis seven segment pada umumnya, yaitu common anode dan
common catode. Perbedaan dari kedua jenis seven segment tersebut adalah pada letak penyusunan LED. Jika seven segment jenis common anode susunan kaki-kaki anode
terhubung menjadi satu, sedangkan seven segment jenis common catode susunan kaki-kaki catode terhubung menjadi satu. Dapat dilihat pada gambar 2.8 dan 2.9.
2.4.
Decoder
BCD
IC (Integrated Circuit) decoder BCD digunakan untuk membantu mengaktifkan seven segment. IC ini berfungsi untuk mengubah masukan yang berupa kode BCD menjadi kode 7 bit, dengan IC tersebut seven segment akan menghasilkan tampilan angka decimal yang sesuai dengan kode BCD yang dimasukkan decoder
BCD ke seven segment. IC yang sering digunakan untuk mengaktifkan seven segment adalah tipe 7447. Simbol IC decoder 7447 dapat dilihat pada gambar 2.10.
Gambar 2.10 Simbol IC 7447 [6]
Kaki a, b, c, d, e, f, g adalah kaki keluaran yang mempunyai keluaran aktif
“rendah”, yaitu dalam keadaan normal kaki tersebut mempunyai keadaan “tinggi”
dan jika IC tersebut aktif maka berubah menjadi “rendah”. Jika dilihat dari kondisi
Kaki LT (LampTest), RBI (Ripple Blanking Input), BI/RBO (Blanking Input/Ripple Blanking Output) merupakan masukan yang aktif “rendah”. Jika kaki LT mendapat masukan “rendah” maka seluruh kaki keluaran a, b, c, d, e, f, g menjadi aktif dan
seven segment akan menampilkan angka 8. Sedangkan kaki BI, jika mendapat masukan “rendah” maka kaki keluaran akan menjadi “tinggi” dan seven segment
akan mati. Bila kaki RBI mendapat masukan “rendah” maka seven segment akan mati. Tabel 2.5 adalah tabel kebenaran IC 7447.
Berdasarkan tabel 2.5, jika IC 7447 dihubungkan dengan seven segment maka akan menampilkan seperti pada gambar 2.11.
Gambar 2.11 Tampilan Seven Segment Menggunakan IC 7447 [6] Tabel 2.5 Tabel Kebenaran IC 7447. [6]
2.5. LED (
Light Emitting Diode
) sebagai Penampil
.LED digunakan sebagai penampil untuk pengganti pasir pada jam pasir
analog. Banyak pilihan warna pada LED, tergantung bahan apa yang digunakan pada
LED. Pada gambar 2.12 menunjukkan bentuk fisik dari LED.
3.1
Diagram Blok Rangkaian
Dalam perancangan Jam Pasir Digital Berbasis Mikrokontroler AT89S51
menggunakan komponen-komponen dasar, antara lain:
1. LED sebagai komponen pengganti pasir sebanyak 32 buah.
2. Mikrokontroler sebagai komponen yang berfungsi untuk pengontrol LED, supaya
menyerupai kerja jam pasir manual.
3. Seven segment sebagai komponen yang berfungsi sebagai penampil waktu berupa
angka desimal.
Untuk perancangan dan pembuatan jam pasir dari yang bersifat manual ke
jam pasir yang menggunakan teknologi elektronika, maka diagram blok dari
rangkaian tersebut seperti pada gambar 3.1.
Gambar 3.1 Diagram Blok Rangkaian
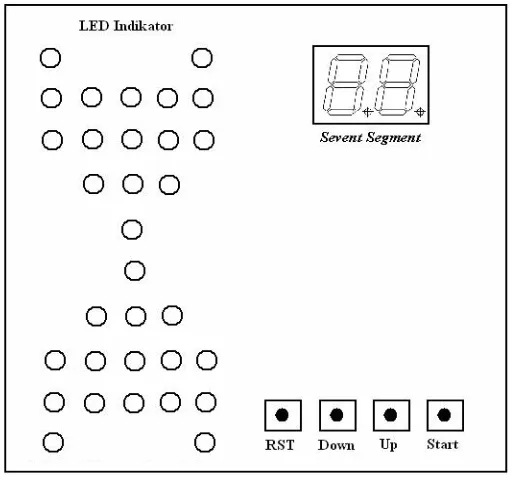
Gambar 3.2 adalah layout jam pasir digital. Pada layout jam pasir digital
terdapat 4 buah tombol sakelar yang mempunyai fungsi sebagai tombol start, reset,
up, down. Selain tombol sakelar juga terdapat 2 buah seven segment dan 32 buah
LED. Seven segment berfungsi untuk menampilkan waktu dalam satuan menit dan
LED untuk menampilkan aliran pengganti pasir.
Gambar 3.2 Layout Jam Pasir Digital
3.2
Perancangan Rangkaian
Untuk memberi kemudahan dalam menganalisa dan mempelajari diagram
blok rangkaian gambar 3.1, maka setiap blok akan dipisah satu-persatu, yaitu :
1. Rangkaian Sakelar
2. Rangkaian Unit Pengolah.
3. Rangkaian Indikator.
3.2.1 Rangkaian Switch
Dalam perancangan jam pasir ini, digunakan 4 buah tombol (switch) yang
umum digunakan (push button). Ke 4 tombol tersebut dapat dilihat pada gambar 3.3
Down
10k
P3.5 5 Volt
P3.6
P3.7 Reset
Up
10uF
Start Reset
Gambar 3.3 Rangkaian Switch
Dari ke 4 tombol tersebut mempunyai fungsi sebagai berikut:
1. Menjalankan perintah Start.
2. Menjalankan perintah Reset.
3. Menjalankan perintah Up, untuk penambahan waktu pada seven segment.
4. Menjalankan perintah Down, untuk pengurangan waktu pada seven segment.
Dalam perancangan jam pasir digital digunakan 4 buah tombol, keempat
tombol tersebut terdiri dari tombol start, reset, up, down. Fungsi dari empat tombol
tersebut sebagai tombol untuk menjalankan perintah start (port P3.7 yaitu pin 17)
yang dihubungkan dengan ground dan untuk menjalankan perintah reset (port RST
yaitu pin 9), sedangkan tombol up (port P3.5) dan down (port P3.6) untuk mengatur
waktu perpindahan aliran LED dari atas ke bawah, hingga LED bagian bawah
3.2.2 Rangkaian Unit Pengolah
Mikrokontroler menjadi pengendali utama dari rangkaian jam pasir.
Pengendali (mikrokontroler AT89S51) tersebut memiliki 4 port (port 0, 1 2, 3).
Dengan port-port tersebut, maka setiap bagian yang akan dikendalikan atau diolah
oleh mikrokontroler dapat terpenuhi dalam perancangan sistem jam pasir digital.
Pada gambar 3.4 kristal (XTAL) berfungsi sebagai detak (clock) sebagai
pengatur siklus sinyal keluaran. Pembangkit clock internal menentukan
kondisi-kondisi (state) yang membentuk sebuah siklus mesin mikrokontroler. Jadi, satu siklus
mesin paling lama dikerjakan dalam 12 periode osilator atau 1 µd, karena pada
rangkaian mikrokontroler menggunakan kristal 12 MHz.
3.2.3 Rangkaian Indikator
Pada rangkaian indikator, digunakan transistor PNP 9012 yang berfungsi
sebagai saklar. Transistor seri 9012 dan 9013 dipilih karena masisng-masing
memiliki β sebesar 78 (minimum) dan 64 (minimum). Pada transistor PNP 9012 kaki
emitor dihubungkan dengan Vcc dan kaki basis dihubungkan dengan P1.0 (salah satu
dari port mikrokontroler). Jika Vcc = 5 V dan P1.0 = 0.45 V pada saat logika rendah
(dianggap di-ground-kan), maka transistor dalam keadaan jenuh (saturasi) atau VEC
= 0. Jadi, jika transistor dalam keadaan jenuh (saturasi) berarti transistor ON.
Sebaliknya jika pada kaki basis mendapat tegangan dari P1.0 pada saat logika
tinggi sebesar 5 volt, maka transistor dalam keadaan cut off. Jika transistor dalam
keadaan cut off, maka transistor OFF. Untuk lebih jelasnya dapat dilihat pada gambar
3.5.
ON saat Saturasi ; OFF saat Cut Off B in EB E BSat R V V V
I = −( + )
B
R
V V
V (0.7 0.45 )
5 − +
=
mA I
IC1 = LED =10
B C I
I 1 =β.
βC1
B
I
I =
78 10mA IB =
mA IB =12.82
B in EB E BSat R V V V
I = −( + )
B
R
V V
V
mA 5 (0.7 0.45 )
82 .
12 = − +
mA V RB 82 . 12 85 . 3 = Ω =300.31
B
R
Jadi resistor (RB) menggunakan 300B Ω
C LED E C I V V
R = −
mA V V RC 10 1 . 2 5 − = Ω =290 C R
LED 300 300 LED PA1.3 300 LED PB3.2 300 PB0.1 PB2.1 300 LED LED 300 300 LED PA0.2 PB3.5 LED PA1.5 P1.3 PA2.2 LED 300 LED LED 300 5V PA0.2 P1.4 PB3.1 9012 PNP LED P1.2 PA2.4 PA2.1 300 LED PA4.1 LED LED LED 300 PA2.3 PB3.5 300 9012 PNP PA2.5 PB2.2 5V PA3.3 PB2.5 P1.0 PA1.4 5V 300 PA4.1 PA1.1 LED P2.4 300 300 LED PA1.4 PB3.2 300 PB2.2 300 PA2.5 PA3.2 5V 300 LED Q 10 PNP PB2.3 5V 300 P1.1 PB1.1 PB3.3 300 PB2.4 LED PA1.3 5V 300 300 PB4.1 PA1.2 PA3.3 5V PB2.5 LED 9012 PNP PB1.1 PB2.1 LED PB4.1 LED 9012 PNP PA1.5 PB1.3 PA3.1 LED PB1.3 5V 300 300 PA2.2 300 PA2.3 5V 300 300 P2.2 PB0.1 9012 PNP LED PA0.1 PA3.2 PA3.1 9012 PNP LED 300 9012 PNP PA1.1 PA1.2 5V 9012 PNP LED P2.1 LED PB3.4 300 P2.0 PB3.4 LED PA0.1 PA2.1 300 300 LED P2.3 9012 PNP LED 300 300 LED PB3.1 PB4.2 PB1.2 PB2.3 300 PA2.4 PB4.2 PB2.4 300 PB1.2 300 300 300 300 LED 300 300 300 PB3.3
Jika pada gambar 3.5 adalah gambar cuplikan dari rangkaian indikator, maka
pada gambar 3.6 adalah gambar rangakain indikator utuh dengan 10 transistor PNP
9012.
Perancangan rangkaian indikator berfungsi untuk mengatur jenis-jenis aliran
LED agar perpindahan LED dari atas ke bawah dapat terlihat secara teratur,
walaupun aliran LED diatur pada saat program dijalankan oleh mikrokontroler.
Rangkaian indikator tersebut menggunakan 3 buah port yaitu port 1 (P1.0…..P1.5),
port 2 (P2.0…..P2.5) dan port 3 (P3.0…..P3.5), dapat dilihat pada gambar 3.6.
3.2.4 Rangkaian Tampilan Seven Segment
Gambar 3.7 Rangkaian Penampil Waktu pada Seven Segment
Gambar 3.7 merupakan gambar rangkaian seven segment untuk menampilkan
tampilan waktu dalam satuan menit. Berdasarkan data sheet dari seven segment,
dapat diketahui bahwa arus yang dapat melewati seven segment atau IF(7’S) = 10mA
dengan tegangan VF(7’S) = 1.8 V. Tegangan keluaran dari decoder pada saat logika
melebihi batas maksimal 2.2 V (data sheet seven segment) dapat diperoleh dengan
perhitungan sebagai berikut:
Vcc = VF(7’S) + VRS + VOL
= VF(7’S) + IF(7’S).RS + VOL
Rs =
) ' 7 ( ) ' 7 ( ) ( S F OL S F cc I V V
V − +
= mA V V V 10 ) 25 . 0 8 . 1 (
5 − +
= 295Ω
Karena resistor 295Ω tidak ada di pasaran maka dalam perancangan, nilai
resistor yang digunakan menjadi 300Ω. Jika resistor yang digunakan sebesar 300Ω
kemungkinan besar komponen akan terhindar dari arus lebih.
Dalam perancangan, seven segment berfungsi untuk menampilkan waktu
dalam hitungan menit, maka digunakan transistor yang berfungsi sebagai saklar
untuk proses scanning kedua seven segment. Karena kedua seven segment pada
gambar 3.7 tidak dapat menyala bersamaan, maka digunakan teknik scanning pada
kedua seven segment. Karena proses scanning pada seven segment sangat cepat,
maka seven segment kelihatan menyala bersamaan tetapi sebetulnya menyala
bergantian.
Transistor yang digunakan adalah transistor PNP karena mikrokontroler akan
mengeluarkan logika rendah sebagai tanda aktif seven segment. Transistor seri 9012
dipilih karena memiliki β sebesar 78 (minimum). Tegangan keluaran
mikrokontroler pada saat logika rendah adalah VOL(mikro) sebesar 0.45 V. Perhitungan
IC = 8.10mA
= 80mA
IC = β.IBB
= β C I = 78 80mA
= 1.025mA
RB = B
B B I V = B mikro OL BE CC I V V
V −( + ( ))
= mA V V V 025 . 1 ) 45 . 0 7 . 0 (
5 − +
= 3756.1Ω
Karena resistor dengan nilai 3756.1Ω tidak terdapat di pasaran maka
digunakan resistor dengan nilai 3900Ω.
3.3
Perancangan
Software
Untuk menjalankan aliran LED dari atas ke bawah dengan perubahan waktu
yang telah ditentukan (range waktu perpindahan LED) yaitu dengan menekan tombol
start. Saat tombol start ditekan, maka mikrokontroler akan aktif dan melakukan
inisialisasi, yaitu mengisi data-data dalam mikrokontroler dari data-data awal
Perubahan waktu ditentukan dengan menekan tombol up atau down dan
mikrokontroler akan mengaktifkan seven segment untuk tampilan waktu awal “3.0”.
Kemudian mikrokontroler akan masuk ke subrutin cek tombol, dalam subrutin
apabila tombol up atau down ditekan maka program akan masuk ke program utama
untuk menjalankan program utama. Pada rangkaian jam pasir digital terdapat 5 baris
LED, jadi setiap ada masukan perubahan waktu perpindahan LED dari tombol up
atau down, maka setiap masukan tersebut akan dibagi 5. Maksimal masukan untuk
perubahan waktu perpindahan LED adalah 60 menit dan minimal masukan
perubahan waktu perpindahan LED adalah 0 menit. Waktu default pada jam pasir
digital di-set pada program, yaitu sebesar 30 menit. Jika masukan perubahan waktu
perpindahan LED 15 menit, dapat diperoleh:
5 15menit
T =
= 3 menit
Jadi ketika masukan perubahan waktu perpindahan LED 15 menit, maka setiap baris
pada indikator mempunyai waktu perpindahan 3 menit.
Prinsip kerja dari jam pasir ini adalah jika tombol start ditekan, maka jam
pasir akan bekerja. LED pada bagian atas jam pasir akan menyala sesuai waktu
default pada program yaitu 30 menit dan waktu setting-an tersebut akan ditampilkan
pada seven segment. LED tersebut akan mati tiap baris dari atas ke bawah, dan
berpindah ke LED bagian bawah jam pasir. Pada LED bagian bawah jam pasir akan
menyala tiap baris dari bawah ke atas sampai penuh. Jika tombol Up atau Down
ditekan, maka waktu perubahan untuk setting waktu akan bertambah 1 menit untuk
tombol Down. Penambahan dan pengurangan waktu perubahan waktu tersebut
nantinya juga akan ditampilkan pada seven segment. Tombol Reset berfungsi untuk
mengembalikan setting-an awal. Proses penyalaan LED dapat dilihat pada gambar
3.8.
3.3.1 Diagram Alir Program Menyalakan Led (Flowchart)
Diagram alir program untuk menyalakan led pada jam pasir digital ditunjukan
pada gambar 3.9
Gambar 3.9 Flowchart Program Utama
Pada diagram alir (flowchart) pertama menjalankan perintah inisialisasi timer
1 dan mode 1, dengan waktu default pada program sebesar 30 menit. Lalu
menyalakan semua led dan menampilkan waktu Tdefault pada seven segment,
kemudian menyimpan waktu Tdefault yang ditampilkan pada alamat yang sudah
Jika ada perubahan pada pengaturan waktu, maka perubahan tersebut disimpan lagi
pada alamat yang sudah ditentukan.
3.3.2 Diagram Alir (Flowchart) Panggil Proses Tombol
Gambar 3. 10 menunjukan diagram alir (flowchart) proses panggil tombol
untuk mengatur perubahan waktu Tdefault.
Diagram alir panggil proses tombol dapat dilihat pada gambar 3. 19. Pertama
pengeceken apakah tombol up ditekan, jika ya maka waktu Tdefault ditambah 1 (satu).
Perubahan waktu tersebut disimpan pada alamat yang sudah ditentukan. Waktu yang
sudah berubah akan ditampilkan pada seven segment. Jika tombol up tidak ditekan,
maka akan mengecek apakah tombol down ditekan. Jika tombol down ditekan, maka
waktu Tdefault dikurangi 1 (satu). Lalu perubahan waktu tersebtu disimpan pada
alamat yang sudah ditentukan dan ditampilkan pada seven segment. Jika tombol
down tidak ditekan, maka akan mengecek apakah tombol start ditekan. Jika ya maka,
aliran led dijalankan sesuai waktu T yang ditampilkan pada seven segment. Jika
waktu aliran led sudah selesai, maka akan kembali ke pengaturan awal.
3.3.3 Diagram Alir (flowchart) Penampil Waktu pada Seven Segment.
Diagram alir (flowchart) pada gambar 3.11 pertama menampilkan angka 30
pada seven segment dan simpan pada alamat yang sudah ditentukan. Lalu
pengecekan apakah ada perubahan waktu. Jika tidak, maka tetap menampilkan angka
30. Jika ada perubahan, maka perubahan tersebut akan dikurangi 10 dan simpan hasil
pengurangan pada alamat yang sudah ditentukan.. Lalu melakukan pengecekan
apakah ada sisa dari pengurangan tersebut. Jika ya, maka sisa hasil pengurangan
ditambah 10 dan simpan pada alamat yang sudah ditentukan. Jika tidak, maka
tampilkan hasil pengurangan pada seven segment pertama dan tampilkan angka 0
pada seven segment kedua. Pada saat menampilkan waktu, antara seven segment
pertama dan kedua diberi tunda. Sehingga seven segment pertama dan kedua menyala
3.3.4 Diagram Alir (flowchart) Pemberian Tunda Pada Aliran Led
Pada gambar 3.12 menunjukan diagram alir (flowchart) pemberian tunda
pada aliran led
Pada diagram alir pemberian tunda pada aliran led pertama menyimpan T
pada alamat yang sudah ditentukan. Lalu bagi T dengan angka 5, karena aliran led
ada 5 baris. Simpan hasil pembagian pada alamat yang sudah ditentukan. Lalu
kalikan sisa hasil pembagian dengan angka 12, karena 0.2 dari 60 adalah 12. Lalu
pengecekan apakah hasil pembagian adalah 0. Jika tidak, maka isi tunda dengan 1
detik. Setelah itu ulangi tunda sampai 60 kali (proses tunda1 = 1menit). Lalu ulangi
tunda1 sampai sebesar hasil pembagian. Jika hasil pembagian adalah 0, maka akan
melakukan pengecekan apakah hasil perkalian dari sisa pembagian adalah 0. jika
tidak, isi tunda3 dengan 1 detik. Lalu ulangi tunda3 sampai sebesar hasil perkalian
dari sisa hasil pembagian. Jika hasil perkalian dari sisa pembagian adalah 0 maka
4.1. Prinsip
Kerja.
Prinsip kerja dari jam pasir digital adalah jika sakelar on, maka semua led akan menyala dan seven segment menampilkan angka 30. Angka 30 berarti, led baris 6, 7, 8, 9, 10 akan menyala semua dalam waktu 30 menit. Led akan menyala jika pada
mikrokontroler port 1 bit 1 sampai bit 5 berlogika rendah dan akan mati jika port 2 bit
1 sampai bit 5 berlogika tinggi. Jam pasir digital dilengkapi dengan 4 tombol, yaitu
tombol start, up down, dan reset. Dapat dilihat pada gambar 4.1.
Gambar 4.1 Layout Jam Pasir Digital
Tombol start berfungsi sebagai tombol untuk menjalankan perpindahan aliran led. Tombol up berfungsi untuk menambah tunda waktu perpindahan aliran led. Setiap ditekan 1 kali, maka tunda waktu bertambah 1 menit. Tombol down berfungsi untuk mengurangi tunda waktu perpindahan aliran led. Setiap ditekan 1 kali, maka
tunda waktu berkurang 1 menit. Tombol reset berfungsi untuk mengatur ulang, jika pengaturan waktu salah. Jika perpindahan led sudah berjalan, maka tombol up dan
down tidak berfungsi lagi.
4.2
Pengamatan Perpindahan Aliran Led
Pengamatan aliran led berfungsi untuk mengetahui apakah aliran dapat
mengalir dengan benar. Tunda waktu perpindahan aliran led dapat diatur dari rentang
waktu 00 menit sampai 60 menit. Jika jam pasir digital diatur dengan tunda waktu 00
menit, maka bila tombol start ditekan led bagian bawah (baris 6, 7, 8, 9, 10) langsung menyala semua.
Jika tunda waktu aliran led diatur dari 1 menit sampai 60 menit, maka baris led 6, 7,
8, 9, 10 langsung mati. Tetapi akan menyala kembali setelah tunda waktu selesai
berjalan.
Jika perpindahan aliran led sudah selesai sesuai dengan tunda yang sudah
ditentukan, maka akan kembali pada pengaturan awal yaitu led menyala semua dan
seven segment menampilkan angka 30. untuk lebih jelasnya dapat dilihat pada gambar 4.2.
4.3
Pengamatan Tunda Waktu
Tunda waktu berfungsi untuk menentukan tunda pada perpindahan led. Data
tunda waktu diperoleh berdasarkan perhitungan waktu pada stopwatch. Tabel 4.1 adalah data pengamatan tunda waktu dari 1 menit sampai 60 menit dan tabel 4.2
adalah data tunda waktu tiap baris led.
Tabel 4.1 Data Pengamatan Tunda Waktu Data Seven
Segment
Data
Stopwatch
Error Data Seven Segment
Data
Stopwatch
Error
Lanjutan tabel 4.1 Data Seven
Segment
Data
Stopwatch
Error Data Seven Segment
Data
Stopwatch
Error
17 menit 17 menit 02 detik 0.19 % 47 menit 48 menit 10 detik 2.48 % 18 menit 18 menit 01 detik 0.09 % 48 menit 49 menit 09 detik 2.39 % 19 menit 18 menit 59 detik 0.08 % 49 menit 50 menit 10 detik 2.38 % 20 menit 20 menit 16 detik 1.33 % 50 menit 51 menit 40 detik 3.33 % 21 menit 21 menit 15 detik 1.19 % 51 menit 52 menit 40 detik 3.26 % 22 menit 22 menit 13 detik 0.98 % 52 menit 53 menit 42 detik 3.26 % 23 menit 23 menit 12 detik 0.86 % 53 menit 54 menit 40 detik 3.14 % 24 menit 24 menit 11 detik 0.76 % 54 menit 55 menit 41 detik 3.11 % 25 menit 25 menit 20 detik 1.33 % 55 menit 56 menit 52 detik 3.09 % 26 menit 26 menit 19 detik 1.21 % 56 menit 57 menit 51 detik 3.30 % 27 menit 27 menit 18 detik 0.11 % 57 menit 58 menit 50 detik 3.21 % 28 menit 28 menit 16 detik 0.95 % 58 menit 59 menit 51 detik 3.18 % 29 menit 29 menit 20 detik 1.14 % 59 menit 60 menit 47 detik 3.02 % 30 menit 30 menit 38 detik 2.11 % 60 menit 62 menit 25 detik 4.02 %
Perhitungan untuk error pada tabel 4.1 sebagai berikut:
% 100 × − = segment seven data stopwatch data segment seven data Error
Contoh untuk error
![Gambar 2.1 Blok Diagram AT89S51 [1]](https://thumb-ap.123doks.com/thumbv2/123dok/1543971.2046143/24.609.117.539.109.610/gambar-blok-diagram-at-s.webp)
![Gambar 2.2 Peta Memori Interupsi [1]](https://thumb-ap.123doks.com/thumbv2/123dok/1543971.2046143/27.609.119.500.299.652/gambar-peta-memori-interupsi.webp)
![Gambar 2.4 Susunan Bit dalam Register TCON [1]](https://thumb-ap.123doks.com/thumbv2/123dok/1543971.2046143/37.609.180.455.319.593/gambar-susunan-bit-dalam-register-tcon.webp)
![Tabel 2.4 Vektor-Vektor Interupsi [1]](https://thumb-ap.123doks.com/thumbv2/123dok/1543971.2046143/42.609.189.452.404.540/tabel-vektor-vektor-interupsi.webp)
![Gambar 2.5 Jenis Transistor dan Simbol Transistor. [2]](https://thumb-ap.123doks.com/thumbv2/123dok/1543971.2046143/43.609.243.397.540.704/gambar-jenis-transistor-dan-simbol-transistor.webp)
![Gambar 2.7 Seven Segment. [6]](https://thumb-ap.123doks.com/thumbv2/123dok/1543971.2046143/45.609.123.529.508.720/gambar-seven-segment.webp)
![Gambar 2.10 Simbol IC 7447 [6]](https://thumb-ap.123doks.com/thumbv2/123dok/1543971.2046143/46.609.245.430.461.634/gambar-simbol-ic.webp)
![Tabel 2.5 Tabel Kebenaran IC 7447. [6]](https://thumb-ap.123doks.com/thumbv2/123dok/1543971.2046143/47.609.165.473.425.670/tabel-tabel-kebenaran-ic.webp)
![Gambar 2.12 Gambar Fisik LED [8]](https://thumb-ap.123doks.com/thumbv2/123dok/1543971.2046143/48.609.261.379.229.343/gambar-gambar-fisik-led.webp)