MODEL SISTEM PEMELIHARAAN TANAMAN OTOMATIS BERBASIS MIKROKONTROLLER
Maxi Aldi Syariefal, Prihastuti Harsani, M.Si, Iyan Mulyana M.kom Program Studi Ilmu Komputer-FMIPA Universitas Pakuan
Jl. Pakuan PO BOX 452, Bogor Telp/Fax (0251) 8375 547 E-mail : maxialdi38gmail.com
ABSTRAK
Pada budidaya tanaman, ketersedian air dan pupuk sangatlah penting. Tanaman tidak bisa hidup dan berkembang dengan baik jika air pada tanah serta pemupukannya tidak sesuai dengan kebutuhan. Untuk itu perlu dilakukan penyiraman dan pemupukan tanaman secara teratur dan terjadwal. model sistem pemeliaraan tanaman otomatisasi mengunakan moisture sensor dan mikrokontroler ATMEGA8535. Moisture sensor akan mendeteksi kering tanah basanya tanah, output pada model ini ada 2 yaitu pompa air dan servo, jika tanah mendapat nilai 0% sampai sampai 60% sensor akan medeteksi dan akan memberikan arus pada pompa air secara otomatis . jika tanah sudah tersiram air hingga 70 %pompa air akan otomotis akan berhenti.pada saat pemupukan telah dijadwalkan jam 17.00 wib servo akan membuka selama 5 detik setelah 5 detik servo akan otomatis akan menutup kembali. Selain output diatas LCD menjadi indikator untuk menampilkan nilai kering basahnya tanah yang terbaca oleh moisture sensor dan menampilkan waktu.
Kata Kunci : Tanaman & moisture sensor Pendahuluan
Tanaman hias mencakupi semua tumbuhan, yang sengaja ditaman orang sebagai komponen taman, kebun rumah, tanaman hias. Ataupun sebagai komponen karangan bunga.taman hias. adalah salah satu salah satu dari pengelompokan berdasarkan fungsi tanaman hortikultura. Bagian yang di manfaatkan orang tidak semata bunga tetapi kesan keindahan yang dimucunculkan oleh tanaman ini.
Perawatan tanaman hias harus secara intensif dan berkala agar tanaman selalu terlihat sehat dan indah sepanjang waktu. terutaman Penyiraman, air merupakan unsur penting untuk proses metabolik pada tanaman. Air juga berfungsi sebagai penggembur tanah agar memudahkan akar dalam mengambil unsur hara dalam tanah. Dan Pemupukan, tanaman memerlukan berbagai unsur hara (nutrisi) agar dapat tumbuh dan berkembang. Pada dasarnya tanah memiliki unsur tersebut, namun jumlahnya
dapat berbeda tergantung kondisi area tanah. Maka dari itu diperlukan pemupukan agar nutrisi pada tanaman dapat terpenuhi. Pada saat ini sering melihat dalam melakukan pemupukan tanaman dan penyiraman tanaman secara manual, hanya dengan menggunakan tenaga manusia seperti pemberian pupuk dan penyiraman menggunakan ember, selang penyemprot, atau karena kesibukan aktifitas, mereka sengaja membayar tukang kebun untuk merawat dan menyiram pupuk pada taman mereka. Serta bentuk penyiraman pupuk yang lain, tapi sering kali apa yang mereka lakukan itu tidak efektif dan efisien.
Dengan adanya permasalahan tersebut maka diperlukan program yang canggih salah satunya dengan menggunakan aplikasi rangkaian elektronik berbasis mikrokontroller merupakan salah satu program yang dikembangkan untuk mempermudah proses pemberian pupuk dan penyiraman pada tanaman secara
otomatis. Salah satu cara yang dapat dilakukan untuk melakukan pemeliharaan pada tanaman secara otomatis adalah dengan cara memasang soil moisture sensor, sebagai perintah proses, maka program ini akan berjalan sesuai keinginan. Agar program ini dapat berfungsi sesuai dengan keinginan, maka diperlukan alat bantu yaitu mikrokontroler. Sehingga alat ini bisa diprogram untuk melakukan penyiraman berdasarkan perintah yang telah ditentukan.
Berdasarkan maslah yang diatas maka penulis mengambil judul “Model Sitem Pemeliharaan Tanaman Otomatisasi Berbasis Mikrokontroller”.
SistemInstrumentasi
1. Soil moisture Sensor
Soil moisturesensor adalah sensor kelembapan yang dapat mendeteksi kelembapan tanah. Sensor ini sangat sederhana, tetapi ideal untuk memantau tanaman, atau tikat air pada tanaman pekarangan. Sensor ini terdiridari 2 prode untuk melewatkan arus melalui tanah, kemudian membaca resistansinya untuk mendapatkan nilai tingkat kelembapan. Semakin banyak air membuat tabnah lebih mudah menghantarkan listrik (resistansi kecil) , sedangkan tanah yang kering sangat sulit menghantarkan listrik (resistansi besar).
2. Mikrokontroler ATMEGA 8535 Mikrokontroler AVR ATmega8535 adalah salah satu dari keluarga ATmega dengan populasi pengguna cukup besar. Memiliki memori flash 32k dan 32 jalur input output, serta dilengkapi dengan ADC 8 kanal dengan resolusi 10-bit dan 4 kanal PWM. Sebuah chip dengan fitur cukup lengkap untuk mendukung beragam aplikasi, termasuk robotik. MikroAVR32 sudah dilengkapi dengan built-in USB ISP programmer, sehingga pemrograman dapat dilakukan dengan mudah, cukup dengan menghubungkan kabel USB ke komputer. Dengan demikian, belajar mikrokontroler ATmega8535 dan pemrograman
mikrokontroler ATmega32 menjadi lebih asyik dan menyenangkan (Atmel, 2011). 3. Pompa
adalah suatu peralatan mekanik yang digerakkan oleh tenaga mesin yang digunakan untuk memindahkan cairan (fluida) dari suatu tempat ke tempat lain, dimana cairan tersebut hanya mengalir apabila terdapat perbedaan tekanan. Pompa juga dapat diartikan sebagai alat untuk memindahkan energi dari pemutar atau penggerak ke cairan ke bejana yang bertekanan yang lebih tinggi.
4. Servo
Rangkaian motor servo digunakan sebagai alat penggerak yang digerakan berdasarkan arah putaran sudut rotornya yang nantinya berfungsi sebagai kunci Metode Penelitian
Model sistem pemeliharaan tanaman otomatis menggunakan metode penelitian bidang hardwareprograming. Tahapan pada metode penelitian ini yaitu perancangan, penelitian, pengetesan komponen, desain system mekanik, desain system listrik, desain software, tes fungsional, integrasi atau perakitan, tes fungsional keseluruhan sistem, Aplikasi sistem.
1. WaktuDan TempatPenelitian
Penelitian ini dilaksanakan mulai Bulan Maret 2014 sampai november 2014. Waktu pelaksanaan dilaksanakan setiap hari senin sampai dengan hari kamis, mulai dari jam 10.00 sampai jam 15.00 WIB di Laboratorium Workshop Program Studi Ilmu Komputer FMIPA Universitas Pakuan Bogor.
2. Diagram Block
Perancangan hardware secara umum digambarkan pada blok diagram seperti terlihat dalam gambar 1 berikut ini.
Gambar 1. Diagram Blok Sistem Diagram block sistem diatas dapat dijelaskan berupa input yang terdeteksi dari moisture sensor akan bekerja ketika kering tanah dibawah 60% maka pompa air akan nyala.dan servo akan bekerja di jam 17.00 wib servo akan otomatis terbuka setelah 5 detik servo akan otomatis menutup.
3. AlgoritmaSistem
Pembuatan perangkat lunak sistem harus mengutamakan cara kerja yang efisien berikut flowchart dari desain software yang digunakan. Flowchart program utama terdapat pada gambar 2.
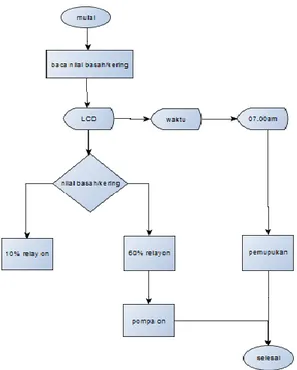
Gambar 2. Flowchart Program Utama Penjelasan flowchart program utama: 1. Program Start yang berarti program
dimulai.
2. Cek input sensor dari kering/basahnya tanah apakah ada nilai yang diprosesnya jika sensor 1 dan 2 membacanya maka Lcd akan
menampilkan nilai tanah jika nilai kurang dari 50% maka relay on dan dan akan ada arus listrik untuk menghidupkan pompa air namun jika nilai melebihi 50% maka relay off dan tidak ada arus listrik maka pompa air tidak akan menyal.
4. Proses membuka pintu pemupukan yaitu pada waktu yang ditampilkan pada LCD jika waktu telah mencapai pada pukul 07.00am maka pintu akan otomatis terbuka selama 2 detik , berkat gerakan motor servo.
5. End menandakan proses dari sistem tersebut telah selesai dan akan melooping atau mengulang kembali ke kondisi START (Mulai).
Hasil Dan Pembahasan 1. Pengujian Minimum
ATMega8535
Pengujian minimum
mikrokontroller ATMega8535 dilakukan dengan memberikan tengangan 12V dengan indikator awal led akan menyala. Berikut pengujian ATMega8535 ditunjukan pada gambar
Gambar 17. Pengujian Minimum ATMega8535
2. Pengujian soil moisture sensor Pengujian minimum soil moisture
sensor dilakukan dengan memberikan nilai tanah basah/keringnya yang tersambung pada mikrokontroller. dengan menampilkan nilai di lcd. Berikut pengujian soil moisture sensor ditunjukan pada gambar 18.
Gambar 18. Pengujian soil moiusture sensor
3. Pengujian LCD
Pengujian ini dilakukan untuk mengetahui fungsi atau tidaknya sebuah komponen LCD, karena LCD yang digunakan yaitu LCD 16x2 dimana lebar display sebanyak 2 baris dan kolom. Pengujian LCD sangatlah penting untuk sebagai pemeberitahuan proses dari sistem pada tanaman tersebut. Gambar pengujian LCD dapat ditampilkan pada gambar 19.
Gambar 19. Pengujian LCD 4. Pengujian Motor Servo
Motor servo biasanya menggunakan tegangan supplay sebesar 5V. Motor servo dikendalikan dengan cara mengirimkan sebuah sinyal pulsa yang lebar pulsanya bervariasi. Biasanya lebar pulsanya antara 1 ms sampai dengan 2 ms dengan periode pulsa sebesar 20 ms.
Gambar 20. Sinyal untuk mengendalikan motor servo
5.Pengujian Sistem
Tabel pengujian motor servo ini dilakukan untuk mengetahui posisi motor servo ketika sistem dijalankan. Posisi yang digunakan pada motor servo, yaitu posisi servo untuk kondisi buka dan posisi servo untuk kondisi tutup sekaligus mengetahui seberapa besar sudut derajat yang diperoleh untuk dua kondisi tersebut. Berikut tabel pengujiannya ditunjukkan pada tabel2.
Tabel 2. Pengujian Motor Servo
Servo Tegangan Waitus Arah motor Servo 1 5V 1600 Buka Servo 2 5V 2000 Buka Servo 1 5V 2000 Tutup Servo 2 5V 2500 Tutup
5. Pengujian Pin – Pin Komponen Pengujian ini dilakukan dengan cara menghubungkan semua pin komponen yang digunakan ke modul mikrokontroler ATmega8535 sesuai portnya masing-masing, sehingga bisa diketahui apakah masih ada pin komponen
yang sudah terpasang dan sesuai atau belum. Berikut tabel pengujiannya ditunjukkan pada tabel 3.
Tabel 3. Pengujian Pin – Pin Komponen
Nama Komponen Pin – Pin yang digunakan Keterangan
Sensor 1 Pina.0 Sesuai Sensor 2 Pina.2 Sesuai Motor
servo1 Porta1 Sesuai Motor
servo2 Porta3 Sesuai
Lcd Portb.0 –
portb.7 Sesuai
Relay Portc.0 Sesuai
Rtc Portd.4 Sesuai
Tabel 3. dijelaskan bahwa port yang digunakan dari keseluruhan komponen hanya beberapa port saja, tidak semua port pada mikrokontroler ATMega32 digunakan. Tujuan dari pengujian pin-pin tersebut, yaitu untuk mengetahui apakah masih ada pin-pin dari komponen yang sudah terhubung atau belum, karena jika salah satu pin komponen yang tidak sesuai dan tidak terhubung maka komponen tersebut tidak akan berjalan sesuai dengan apa yang kita inginkan.
Pengujian Software
Pengujian terhadap software dilakukan untuk mengetahui kemungkinan tidak berfungsinya beberapa menu bahkan lebih, sehingga dapat membuat waktu
pembuatan (Assembling) akan terganggu, dengan memastikan tidak adanya kendala tersebut diharapkan dalam pembuatan software yang terkait akan lebih cepat, tepat dan efisien.
1. Pengujian Program
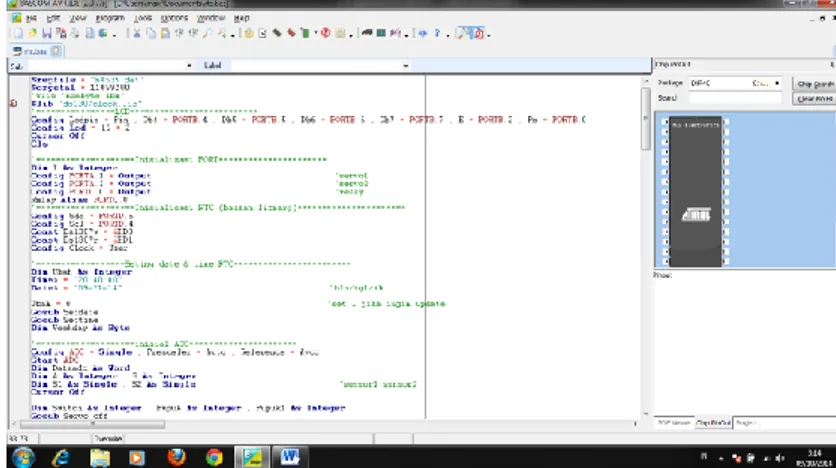
Pengujian program dilakukan untuk mengetahui listing program yang dibuat sudah sesuai dengan yang diinginkan, termasuk mengetahui masih ada error atau tidak. Berikut pengujian program ditunjukan pada gambar 22.
Gambar 22. Pengujian Program Validasi Sistem
Validasi Sistem ini dilakukan bertujuan untuk mengetahui apakah sistem yang telah dirancang sudah bekerja dengan baik atau belum, dalam hal ini apakah sistem otomatis berjalan sesuai perintah, saat penyiraman berdasarkan keringnya tanah menggunakan soil moisture sensor maupun membuka pintu penempatan pupuk menggunakan servo..
1. Validasi penyiraman
Validasi penyiraman merupakan proses pengujian yang dilakukan dengan menggunakan soil moisture sensor. Hasil Validasi penyiraman dapat diketahui
keberhasilannya dilahat dari nilai soil moisture sensor yang terdapat lcd, . Berikut data hasil validasi penyiraman terdapat pada tabel 4.
Indikator Nilai Pompa Air Sensor1 0.95% On 15.11% On 30.33% On 38.29% On 45.19% On 52.13% On 65.73% Off Sensor2 1.22% On 14.20% On 28.14% On 36.32% On 49.33% On 69.75% Off Tabel 4. Validasi penyiraman
Gambar23. Program Soil Moistuere Sensor
Gambar24. Flowchart program sensor 1
Gambar25. Flowchart program sensor 2 Pada gambar 24 dan 25 menunjukan untuk nilai adc sensor , setelah lihat adc yang didapat kering =0, nilai terbaca dibagi nilai maximum basah (360) dikalikan 100%. menjadi persentase tanah. Syarat yang ditentukan keringnya tanah untuk memulai penyiraman yaitu <10% dan syarat kebasahan tanah untuk cukup penyiraman yaitu >60%.
Keterangan
A = sensor 1
S1 = sensor 1
360 = nilai air basah
<10 = nilai siram .>60 = cukup siram 1 = pompa on 0 = pompa off Keterangan B = sensor 1 S2 = sensor 1
360 = nilai air basah
<10 = nilai siram
.>60 = cukup siram
1 = pompa on
2. Validasi Pergerakan Pintu Penempatan Pupuk
Validasi pergerakan pintu penempatan pupuk dilakukan terhadap waktu yang ditentukan untuk membuka pintu secara otomatis. Berikut data hasil validasi pergerakan pintu penempatan pupuk terdapat pada tabel 5.
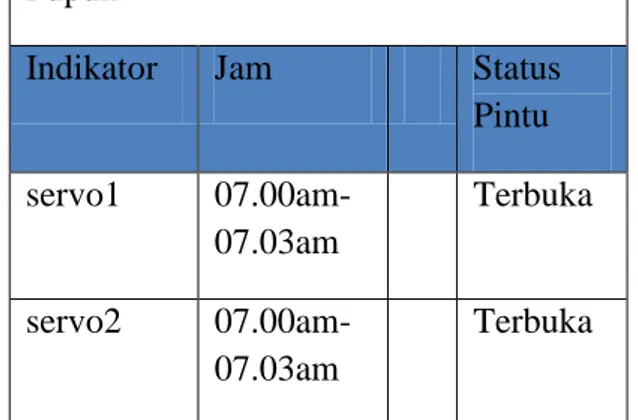
Tabel 5. Validasi Pergerak Pintu Penempatan pupuk
Validasi Pergerakan Pintu Penempatan Pupuk
Indikator Jam Status Pintu servo1 07.00am-07.03am Terbuka servo2 07.00am-07.03am Terbuka
Ket : Jika selain bukan jam yang sudah di tentukan yaitu jam 07.00am maka servo of
Gambar 26. Pintu penempatan pupuk terbuka.
5.5 Optimasi Sistem (Optimization) Pada sistem otomatisasi pemeliharaan tanaman ini masih
ditemukan kendala dalam perakitan dan keseluruhan sistem maka dapat dilakukan optimasi untuk meningkatkan performa dari aplikasi yang telah dirancang.
Dalam perancangan selanjutnya dapat dikembangkan khususnya pada penggunaan sensor yang lebih akurat pendeteksian dan desain casing sensor pada tanah yang mampu bertahan terhadap cuaca yang ekstrim, menggunakan output dengan servo untuk membuka pintu penempatan pupuk,dan tampilan nilai sensor /waktu pada lcd agar dapat diketahui berapa persen kering/basah tanah dan waktu pada saat pemupukan. Hal-hal tersebut dapat mengoptimalkan sistem otomatisasi pemeliharaan tanaman.
Dalam sistem ini masih ditemukan kesalahan sistem dalam mendeteksi status nilai kering/basah, khususnya pada sensor yang dimana sensor bekerja kurang optimal yang disebabkan pengaruh resistansi pada panjangnya kabel wire sehingga pendeteksian nilai kurang akurat,
no Persentasi kekeringan tanah Kondisi tanah Status 1 10 % Tanah kering Siram 2 20% Tanah kering Siram 3 30% Tanah kering Siram 4 40% Tanah sedang Siram 5 50% Tanah Siram
sedang 6 60% Tanah sedang Tidak siram 7 70% Tanah basah Tidak siram 8 80% Tanah basah Tidak siram 9 90% Tanah basah Tidak siram 10 100% Tanah basah Tidak siram Tabel 6. Optimasi sistem Soil moisture sensor
Berdasarkan pengujian yang telah dilakukan, secara umum sistem berjalan dengan baik sesuai dengan fungsinya masing – masing. Optimasi dilakukan untuk mengetahui seberapa jauh tingkat efektifitas sistem dan kemungkinan adanya kendala teknis yang dimungkinkan terjadi disebabkan pengaruh dari luar.
Kesimpulan
Kesimpulan dari penelitian yang sudah dilakukan, yaitu sebuah prototipe sistem otomatisasi pemeliharaan tanaman berbasis mikrokontroler menggunakan soil moisture sensor sebagai sensor mendeteksi kering/basahnya tanah. Struktur sistem prototipe pemeliharaan tanaman otomatis ini berhasil dibuat dan di uji coba
menggunakan sebuah mikrokontroler ATMega32,motor servo untuk membuka suatu penempatan pupuk agar pintu bisa terbuka dan menutup secara otomatis. Sedangkan, Mikrokontroler ATmega32 sebagai otak dari sistem yang dibangun untuk memproses atau mengakumulasi data yang dikirim.
Kelebihan dari prototipe sistem otomatisasi ini terletak pada soil moisture sensor yaitu membaca nilai kering/basah tanah untuk menentukan layaknya siram atau tidak siram yang dibutuhkan tanah tersebut. dan sistem untuk pembuka penempatan pintu pupuk juga sudah menggunakan kontrol otomatis menggunakan servo.
Sistem ini masih ditemukan kendala khususnya pada moisture yang tingkat pendeteksiannya kurang optimal yang disebabkan oleh pengaruh resistansi pada panjangnya kabel wire yang
digunakan.
DAFTAR PUSTAKA Atmel. 2011. Datasheet ATMega8535.
www.labcenter.com. 7 Desember 2013.
Agustian, Indra. 2013. Definisi Sistem Kendali.
http://te.unib.ac.id/lecturer/indraagu stian/2013/06/definisi-sistem-kendali/
30 Desember 2013.
Arif Khoirudin Toufik Muttaqin, 2010. Sistem Penjadwalan Pakan Ikan Otomatis Berbasis Mikrokontroler
Dario. 2012. Speech Recognition Module.
www.seeedstudio.com. 4 Desember 2013.
Muhammad Firdaus, 2011 . pembuatan teknologi penyiraman sederhana
(WaterStreamer) dengan penerapan prinsip fluida
Ricky fajar maulana, 2009. Robot Penyiraman Tanaman Otomatis