1
BAB I
PENDAHULUAN
I.1.Latar Belakang
Pantai barat pulau Sumatera merupakan pertemuan lempeng Indo-Australia dengan lempeng Eurasia. Hingga saat ini, lempeng Indo-Australia masih terus bersubduksi di bawah lempeng Eurasia yang mengakibatkan Pulau Sumatera menjadi salah satu pulau di Indonesia dengan aktivitas tektonik yang cukup tinggi dan rawan bencana (McCaughey, 2012). Salah satu bentuk mitigasi bencana yang dapat dilakukan adalah studi deformasi dengan menghitung besar dan pola pergeseran lempeng serta regangan yang terjadi di daerah pantai barat Pulau Sumatera. Salah satu metode yang dapat digunakan untuk melakukan studi deformasi adalah metode
GPS. Saat ini di pantai barat Pulau Sumetera telah didirikan Sumatran GPS Array
(SuGAr) yang merupakan stasiun CORS yang tersebar sepanjang 1300 km di pantai
barat pulau Sumatera. Sumatran GPS Array (SuGAr) ini setiap harinya merekam
data GPS dengan akurasi tinggi secara kontinyu dan dapat dimanfaatkan untuk studi deformasi.
Perhitungan kecepatan dan pola pergeseran dengan menggunakan metode GPS sangat tergantung pada strategi pengolahan data sehingga diperlukan perangkat lunak yang mampu memberikan hasil dengan ketelitian yang tinggi, salah satunya adalah
perangkat lunak GAMIT/GLOBK. GAMIT (GPS Analysis at Massachusetts Institute
Of Technology) merupakan perangkat lunak ilmiah untuk mengolah data survei GPS
yang dikembangkan oleh MIT (Massachusetts Institute Of Technology) dan SIO
(Scripps Institution of Oceanography. GLOBK (Global Kalman Filter VLBI and GPS Analysis Program) adalah Kalman filter yang berfungsi untuk mengkombinasikan solusi dari hasil pemrosesan data GPS serta menghitung kecepatan dan pola pergeserannya. Keduanya merupakan perangkat lunak yang sangat komprehensif dalam pengolahan data GPS.
I.2.Rumusan Masalah
Berdasarkan uraian kondisi yang telah dijelaskan pada latar belakang, maka permasalahan yang diangkat pada penelitian ini adalah:
1. Berapakah vektor kecepatan pergeseran horizontal sebaran stasiun SuGAr pada rentang tahun 2011 s.d 2013?
2. Berapakah besar regangan stasiun SuGAr pada rentang tahun 2011 s.d 2013?
3. Bagaimana pola regangan stasiun SuGAr pada rentang tahun 2011 s.d 2013?
I.3.Tujuan Penelitian
Tujuan penelitian ini adalah sebagai berikut:
1. Perhitungan vektor kecepatan pergeseran sebaran stasiun SuGAr pada
rentang tahun 2011 s.d 2013.
2. Perhitungan besar regangan stasiun SuGAr pada rentang tahun 2011 s.d 2013.
3. Penentuan pola regangan stasiun SuGAr pada rentang tahun 2011 s.d 2013.
I.4.Manfaat Penelitian
Hasil penelitian ini diharapkan dapat digunakan untuk keperluan mitigasi bencana akibat aktivitas pergerakan lempeng di daerah pantai barat Pulau Sumatera.
I.5.Batasan Masalah
Batasan masalah pada penelitian ini adalah :
1. ITRF yang digunakan adalah ITRF 2008.
2. Titik ikat yang digunakan adalah 15 stasiun IGS, yaitu BAKO, COCO,
CUSV, DGAR, DGAV, GUAM, GUUG, HYDE, KARR, LHAZ, NTUS, PIMO, TNML, TOW2, dan XMIS.
3. Data pengamatan yang digunakan adalah 10 stasiun SuGAR, yaitu ABGS,
BSAT, BTHL, KTET, MKMK, MSAI, PARY, PBLI, PSKI, PSMK pada doy
101 s.d 107 pada tahun 2011 s.d 2013.
4. Perangkat lunak yang digunakan adalah GAMIT/GLOBK 10.5 dan
grid_strain 2D untuk perhitungan besar dan pola regangan.
I.6.Tinjauan Pustaka
Pada tahun 2008, Prawirodirdjo dkk melakukan penelitian dengan judul “Geodetic observations of an earthquake cycle at the Sumatra subduction zone: Role of interseismic strain segmentation”. Penelitian ini bertujuan untuk menganalisis
pada 26 Desember 2004 Mw 9.1 Sumatra‐Andaman, 28 Maret 2005 Mw 8.7
Nias‐Simeulue, dan 12 September 2007 Mw 8.4 gempa Mentawai. Data yang
digunakan adalah data pengamatan GPS tahun 1989 s.d2001 milik
BAKOSURTANAL dan Sumatran GPS Array (SuGAr) tahun 2002 s.d 2007.
Penelitian ini dilakukan dengan menghitung vektor kecepatan pergeseran dan kemudian menganalisis karakteristik patahan yang terjadi. Hasil analisis
menunjukkan bahwa megathrust Sumatra mengalami segmentasi, sebuah
karakteristik yang mungkin akan terus bertahan selama beberapa siklus gempa. Hasil
pemodelan deformasi postseismic dari Sumatra – Andaman dan Nias – Simeulue
menunjukkan bahwa afterslip yang terjadi terkonsentrasi pada updip dan downdip,
masing-masing berasal dari guncangan utama. Berdasarkan perbandingan medan kecepatan sebelum dan sesudah tahun 2001, zona subduksi di bawah Kepulauan Batu dan Enggano yang sebelumnya terkunci, setelah tahun 2001 mengalami pergeseran
bebas. Hal ini menyebabkan interseismic coupling pada patahan subduksi akan
bervariasi dari waktu ke waktu meski segmentasi pada zona subduksi tetap bertahan. Penelitian mengenai deformasi di Pulau Sumatera juga dilakukan oleh Sugiyanto dkk pada tahun 2011. Peneliti melakukan penelitian dengan judul “Analisa Deformasi Permukaan Patahan Aktif Segmen Seulimum dan Segmen Aceh”. Penelitian ini bertujuan untuk melakukan pemutakhiran data perubahan koordinat pada jaringan pengamatan GPS untuk analisa deformasi permukaan daratan Aceh, mempelajari karakteristik patahan aktif segmen Aceh dan segmen Seulimum dengan melakukan pengukuran lanjutan pada jaringan pengamatan GPS pada segmen utara
dari sistem patahan Sumatera, menghitung besar pergeseran post-seismic yang terjadi
setelah gempa Aceh 2004 dengan menganalisa interaksi dari segmen utara dengan
segmen – segmen lainnya dan implikasi dari pergeseran koseimik dan post-seismic
gempa Aceh, dikaitkan dengan transfer dari stress terhadap segmen utara patahan
Sumatra. Perangkat lunak yang digunakan adalah Bernesse 5.0. Dari penelitian ini
diketahui bahwa daratan Aceh masih dipengaruhi oleh aktivitas post-seismic, dengan
rata besaran pergeserannya adalah 10 mm/tahun. Deformasi post-seismic yang masih
terus berlangsung akibat gempa Aceh 2004 akan berimplikasi pada potensi kegempaan pada patahan aktif yang ada di daratan Aceh. Analisis bahaya kegempaan
dengan metode PSHA didapat bahwa PGA untuk kota Banda Aceh adalah sekitar 0,3 – 0,4 g.
Pada tahun 2012 penelitian mengenai deformasi di Pulau Sumatera dilakukan oleh Permana dengan judul “Analisis Deformasi Gempa Padang Tahun 2009 Berdasarkan Data Pengamatan GPS Kontinu Tahun 2009 – 2010”. Tujuan dari penelitian ini adalah untuk meneliti besarnya dampak gempa Padang tahun 2009 dengan menghitung 28 stasiun SuGAr sebelum dan sesudah gempa dengan menggunakan perangkat lunak GAMIT/GLOBK 10.4 dan menghitung besarnya
regangan dengan perangkat lunak grid_strain. Hasil pengolahan data menunjukkan
vektor pergeseran titik-titik pengamatan GPS di Sumatera cenderung bergerak ke arah timur laut (NE) yang mengindikasikan adanya akumulasi energi, sedangkan vektor pergeseran yang mengarah ke barat daya (SW) mengindikasikan adanya pelepasan energi. Gempa 30 September 2009 mengakibatkan pergeseran maksimum dari titik-titik pengamatan GPS sebesar 0,055 m ke arah barat daya. Kecepatan vektor pergeseran rata-rata dari titik-titik pengamatan GPS sebelum gempa adalah sebesar 0,033 m/tahun dan setelah gempa sebesar 0,031 m/tahun dengan pergerakan mengarah ke timur laut. Regangan di sekitar daerah kajian menunjukkan adanya pola
kompresi dengan nilai maksimum sebesar 1,226 x 10-7 strain yang mengindikasikan
potensi terjadinya gempa bumi. Gempa 30 September 2009 tidak menunjukkan deformasi setelah gempa dari hasil yang teramati dan vektor kecepatan pergeseran serta tidak menghilangkan distribusi regangan pola kompresi di sekitar daerah pusat gempa setelah gempa terjadi. Meskipun demikian, gempa ini berdampak cukup besar, khususnya untuk daerah di sepanjang pesisir barat Pulau Sumatera.
Pada tahun 2012 penelitian mengenai deformasi di Pulau Sumatera juga dilakukan oleh Rusmen dengan judul “Analisis Deformasi Gempa Mentawai Tahun 2010 Berdasarkan Data Pengamatan GPS Kontinu Tahun 2010-2011”. Penelitian ini bertujuan untuk meneliti besarnya dampak gempa Mentawai tahun 2010 dengan menghitung vektor pergeseran 31 stasiun SuGAr sebelum dan sesudah gempa dengan menggunakan perangkat lunak GAMIT/GLOBK 10.4 dan menghitung
besarnya regangan dengan perangkat lunak grid_strain. Hasil dari penelitian ini
adalah gempa Mentawai memberikan pengaruh pergeseran horizontal dan vertikal. Pergeseran yang cukup besar teramati 10 s.d 30 cm untuk horizontal dan 1 s.d 6 cm
untuk vertikal yang berada di sekitar pusat gempa, Gempa Mentawai masih memiliki
pengaruh post-seismic dilihat dari data vektor pergeseran setelah terjadi Gempa
Mentawai, yaitu terdapat beberapa stasiun pengamatan yang berlawanan arah dengan
vektor interseismic. Hasil distribusi regangan berupa ekstensi mengindikasikan
adanya post-seismic. Gempa Mentawai mengakibatkan terjadinya pelepasan energi
sekitar 74% pada tahap co-seismic. Nilai ini diperoleh dari perbandingan pergeseran
yang terjadi akibat gempa dengan akumulasi pergeseran sampai tahun 2011.
Penelitian menggunakan data Sumatran GPS Array (SuGAr) juga dilakukan
oleh Pratama dengan judul “Pengolahan Data GPS Kontinyu Jaringan SuGAr (Sumatran GPS Array) Untuk Mengamati Deformasi Akibat Gempa Cekungan Wharton Sumatera” pada tahun 2013. Tujuan penelitian ini adalah untuk menghitung
vektor pergeseran dari plot time series data pengamatan stasiun GPS SuGAr sebelum
dan sesudah terjadi gempa di laut disekitar zona subduksi Sumatera. Data yang digunakan yaitu stasiun UMLH (Ujung Muloh). Data yang tersedia berupa data rinex yang kemudian diolah dan dianalisis dengan perangkat lunak GAMIT. Hasil pengolahan data GPS Sugar pada stasiun UMLH (Ujung Muloh) Provinsi Aceh menunjukkan bahwa pengaruh gempa Mw 8,7 dan Mw 8,2 menyebabkan pergeseran kearah utara (X) sebesar 9,8 cm, pergeseran kearah timur (Y) sebesar 16,7 cm, untuk koordinat Z sumbu Pergeseran pengukuran tinggi alat mempengaruhi ketelitian dengan nilai pergeseran sebesar 4,3 cm.
Perbedaan dengan penelitian-penelitian sebelumnya adalah penelitian ini bertujuan untuk menghitung vektor kecepatan pergeseran horizontal dan regangan
beserta pola yang terjadi di Pulau Sumatera menggunakan sepuluh stasiun Sumatran
GPS Array (SuGAr) dari tahun 2011 s.d 2013 yang tersebar dari utara smpai selatan pantai barat Pulau Sumatera dengan menggunakan 15 stasiun aktif IGS sebagai titik ikat. Perangkat lunak yang digunakan dalam penelitian ini adalah GAMIT/GLOBK
10.5 dan perangkat grid_strain 2D. Analisis penelitian ini tidak dihubungkan dengan
I.7.Landasan Teori I.7.1.GPS
GPS (Global Positioning System) GPS atau NAVSTAR GPS (Navigation
Satellite Timing and Ranging Global Positioning System), merupakan sebuah sistem yang dapat menginformasikan posisi secara global kepada penggunanya. Pada prinsipnya, penentuan posisi dengan GPS dilakukan dengan mengamati satelit-satelit GPS yang memancarkan sinyal-sinyal yang memiliki informasi tentang posisi satelit yang bersangkutan serta jaraknya dari pengamat. Dengan mengamati satelit dalam jumlah yang cukup, si pengamat dapat menentukan posisi dan kecepatannya. Sinyal GPS dibagi dalam tiga komponen, yaitu penginformasi jarak (kode), penginformasi
posisi satelit (navigation message), dan gelombang pembawa (carrier wave).
Terdapat dua kode pseudo-random nosie (PRN) yang digunakan sebagai
penginformasi jarak. Kode yang pertama adalah kode P (Precise atau private) yang
digunakan untuk kepentingan militer Amerika Serikat dan pihak berwenang lainnya.
Kode P didesain untuk precise positioning service (PPS), memiliki panjnag
gelombang sekitar 30 m. Kode P terdapat pada gelombang pembawa L1, L2, dan L5.
Kode yang kedua adalah kode C/A (Coarse Acquisition atau Clear Access) yang
tersedia untuk kepentingan sipil. Kode C/A didesain untuk standard positioning
service (SPS), memiliki panjang gelombang sekitar 300 m. Kode C/A hanya terdapat pada gelombang L1. Setiap satelit GPS memiliki struktur kode yang unik sehingga
memungkinkan receiver GPS untuk mengenali dan membedakan sinyal yang datang
dari satelit yang berbeda.
Disamping kode-kode, sinyal GPS juga membawa pesan navigasi yang berisi informasi tentang koefisien koreksi jam satelit, parameter orbit, almanak satelit, UTC, parameter koreksi ionosfer, informasi mengenai konstelasi dan kesehatan
satelit, serta broadcast ephemeris (orbit satelit). Kode-kode dan pesan navigasi
tersebut dibawa ke pengamat dari satelit oleh gelombang pembawa. Terdapat tiga gelombang pembawa yang digunakan oleh masyarakat sipil, yaitu L1 dengan frekuensi 1,57542 GHz, L2 dengan frekuensi 1227.60 MHz, dan yang terbaru adalah
gelombang L5 dengan frekuensi 1,17645 GHz (Hofmann-Wellenhof, 2008). Adanya pengukuran dual frekuensi dengan L1 dan L2 memiliki keuntungan untuk mengeliminasi bias ionosfer dan meningkatkan ambiguitas resolusi terutama untuk pengukuran dengan tingkat presisi tinggi. Gelombang L5 memiliki kemampuan
ranging memiliki kode pengukuran yang lebih baik daripada kode L1 C/A (Kornhauser, 2006).
Dewasa ini, kegunaan GPS sebagai metode penentuan posisi sudah dimanfaatkan secara luas, salah satunya digunakan untuk pengamatan pergeseran tanah. Pada dasarnya, penggunaan GPS untuk pergeseran tanah dilakukan dengan menentukan koordinat titik-titik pantau secara teliti dan berkala. Dengan mempelajari perubahan koordinat titik-titik pantau tersebut secara kontinyu dari waktu ke waktu, maka besarnya kecepatan dan arah pergeseran dapat diketahui. Dengan diketahuinya besar kecepatan dan arah pergeseran, analisis dan estimasi mengenai regangan yang terjadi dapat dilakukan.
I.7.2.Penentuan Posisi Metode Relatif (Differential Positioning).
Penentuan posisi dengan GPS dapat dilakukan dengan menggunakan metode relatif atau diferensial. Penentuan posisi dengan metode ini dilakukan dengan mengamati beberapa satelit secara simultan dengan menggunakan dua atau lebih
receiver GPS. Penentuan posisi relatif adalah penentuan vektor jarak antara dua
stasiun pengamatan, yang dikenal sebagai jarak basis (baseline). Pada survei GPS,
terdapat dua jenis data pengukuran jarak satelit ke receiver, yaitu pengukuran jarak
fase dan pseudorange. Secara matematis dapat dirumuskan sebagai berikut
(Kornhauser, 2006) :
... (1.1)
... (1.2) Dalam hal ini :
= jarak pseudorange satelit (1) dan receiver (A) pada epok
= jarak fase (carrier phase) satelit (1) dan receiver (A) pada epok
= jarak geometris antara receiver (A) dengan satelit (1) pada epok
= kesalahan jarak akibat kesalahan ephemeris (orbit) pada satelit (1)
= ambiguitas fase dari pengamatan fase sinyal-sinyal L1 dan L2dari
satelit (1) dan receiver (A)
c = kecepatan cahaya dalam ruang vakum (m/s)
λ = panjang gelombang dari sinyal (m)
ϕ = fase gelombang yang terukur
= bias yang disebabkan oleh refraksi troposfer pada receiver (A)
= bias yang disebabkan oleh refraksi ionosfer pada receiver (A)
= kesalahan dan offset dari jam satelit(1) pada epok
= kesalahan dan offset dari jam receiver (A) pada epok
= gangguan (noise) yang disebabkan oleh multipath
Pada penentuan posisi metode relatif, posisi suatu titik ditentukan relatif terhadap titik lainnya yang telah diketahui koordinatnya (monitor station). Penentuan posisi dengan metode ini memiliki tingkat ketelitian yang lebih tinggi dibandingkan dengan metode absolut. Metode ini dilakukan dengan mengurangkan data yang
diamati oleh dua receiver pada waktu yang bersamaan dan beberapa jenis kesalahan
dan bias dapat dieliminasi atau direduksi. Terdapat tiga metode pengurangan (differencing), yaitu Single Difference, Double Difference, dan Triple Difference.
Pengamatan Single Difference (SD) dapat dilakukan dengan menggunakan dua
receiver A,B dan satu satelit dimana kesalahan ephemeris (orbit) dan kesalahan jam
satelit dapat dieliminasi. Pengamatan Double Difference (DD) dapat dilakukan
dengan menggunakan dua receiver dan dua satelit dimana kesalahan jam receiver
dapat dieliminasi. Pengamatan Triple Difference (TD) dapat dilakukan dengan
menggunakan dua receiver, dua satelit, dan dua epoch pengamatan dimana
ambiguitas fase dapat dieliminasi. Secara matematis metode differencing dirumuskan
sebagai berikut (Kornhauser, 2006):
- SD = ... (1.3)
- DD = ... (1.4) - TD = ... (1.5)
I.7.3.Bias dan Sumber Kesalahan
Dalam perjalanannya dari satelit ke pengamat di permukaan bumi, sinyal GPS harus melalui medium propagasi, yaitu ionosfer dan troposfer dimana sinyal GPS
akan mengalami refraksi di dalamnya. Selain itu, sinyal GPS juga dapat dipantulkan
oleh benda-benda di sekitar pengamat dan menyebabkan efek multipath. Kesalahan
dan bias juga dapat disebabkan oleh kesalahan orbit satelit, jam satelit, kesalahan jam
satelit dan receiver, kesalahan antena, ambiguitas fase, dan cycle slips (Abidin,
2007).
I.7.3.1.Kesalahan Orbit Satelit. Kesalahan ini disebut juga dengan kesalahan
ephemeris dimana orbit satelit yang terdapat dalam broadcast ephemeris tidak sama
dengan orbit satelit yang sebenarnya, sehingga posisi satelit yang dilaporkan tidak sama dengan posisi satelit yang sebenarnya dan nantinya akan mempengaruhi ketelitian posisi titik-titik yang diamat. Besarnya efek kesalahan orbit satelit dapat dihitung dengan rumus (Abidin, 2007):
... (1.6) Keterangan:
db = besarnya efek kesalahan orbit pada panjang baseline dr = besarnya kesalahan orbit
b = panjang baseline
r = jarak rata-rata pengamat ke satelit
I.7.3.2. Cycle Slips. Cycle Slips adalah ketidak-kontinyuan dalam jumlah
gelombang penuh dari fase gelombang pembawa yang diamati, pengamatan sinyal
oleh receiver terputus oleh satu dan lain hal (Abidin, 2007).
I.7.3.3. Multipath. Multipath adalah fenomena dimana sinyal yang
ditransmisikan oleh satelit GNSS ditermia oleh receiver melalui dua atau lebih
lintasan berbeda karena efek pantulan benda-benda di sekitar pengamat seperti bangunan, jalan, permukaan air. Perbedaan jarak tempuh dapat menyebabkan sinyal-sinyal tersebut berinterferensi ketika diterima oleh antena sehingga menyebabkan kesalahan hasil pengamatan (Abidin, 2007).
I.7.3.4.Ambiguitas fase. Ambiguitas fase adalah jumlah gelombang penuh
yang tidak terukur oleh receiver GPS. Ambiguitas fase berupa bilangan bulat
kelipatan panjang gelombang. Ketidaktepatan dalam mendefinisikan besarnya ambiguitas fase akan menyebabkan kesalahan dalam penentuan jarak dari satelit ke pengamat (Abidin, 2007).
I.7.3.5.Kesalahan Jam Satelit dan Receiver. Setiap satelit GPS membawa beberapa buah jam atom yang digunakan untuk mendefinisikan sistem waktu satelit. Seiring dengan berjalannya waktu, jam-jam atom tersebut akan mengalami
penyimpangan (offset, drift, dan drift-rate). Pada umumnya receiver GPS dilengkapi
dengan jam kristal quartz yang relatif lebih kecil, lebih murah, dan relatif memerlukan daya yang relatif lebih kecil dibandingkan jam atom yang digunakan di
satelit (Abidin, 2007). Ketidaksinkronan antara jam satelit dengan jam receiver akan
memberikan informasi mengenai waktu yang berbeda dan dapat menjadi sumber kesalahan.
I.7.3.6.Kesalahan Antena. Pada pengukuran jarak dari satelit ke antena
receiver GPS, jarak ukuran diasumsikan mengacu ke pusat geometris dari antena yang lokasinya tetap. Akan tetapi, sebenarnya secara elektronik pengukuran jarak tersebut mengacu ke pusat fase antena, bukan ke pusat geometris antena. Adanya perbedaan lokasi antara pusat fase dan pusat geometris antena akan menyebabkan terjadinya kesalahan pada jarak ukuran (Abidin, 2007).
I.7.3.7.Refraksi Troposfer. Troposfer merupakan lapisan dari atmosfer yang
berbatasan dengan permukaan bumi dan mempunyai ketebalan setinggi 9 s.d 16 km, tergantung pada tempat dan waktu. Ketika melalui troposfer, sinyal GPS akan mengalami refraksi yang menyebabkan perubahan pada kecepatan dan arah dari sinyal GPS. Efek utama dari refraksi troposfer adalah kesalahan terhadap hasil ukuran jarak (Abidin, 2007).
I.7.3.8.Refraksi Ionosfer. Ionosfer merupakan lapisan atas dari atmosfer.
Elektron-elektron bebas yang terdapat dalam lapisan ionosfer akan mempengaruhi propagasi sinyal GPS yang kemudian turut mempengaruhi kecepatan, arah, polarisasi, dan kekuatan dari sinyal GPS yang melaluinya. Efek terbesar dari refraksi ionosfer terletak pada kecepatan sinyal dimana ionosfer akan memperlambat
pseudorange dan memperlambat fase dari sinyal GPS yang akan mempengaruhi ukuran jarak dari pengamat ke satelit (Abidin, 2007).
I.7.4.TEQC
TEQC adalah program komprehensif yang digunakan sebelum pemrosesan data GPS untuk melakukan hal-hal berikut:
1. Translation : Membaca raw data GPS dari receiver dan menerjemahkan data tersebut ke format yang lain,
2. Editing : ekstraksi metadata, editing, dan/atau koreksi header metadata
RINEX atau BINEX,
3. Quality checking data GPS dan/atau GLONASS (file observasi biner, BINEX
atau RINEX, dengan atau tanpa file navigasi dengan ephemeris.
Ketiga fungsi diatas dapat dilakukan secara terpisah, berpasangan, atau
sekaligus dalam sekali running program (Estey, 2013).
I.7.5.Perangkat Lunak GAMIT/GLOBK
GAMIT merupakan salah satu perangkat lunak ilmiah pengolah data GNSS
yang menggunakan platform sistem operasi Unix. Perangkat lunak ini dapat
menghasilkan posisi relatif tiga dimensi dengan tingkat ketelitian tinggi karena data
yang digunakan selain data broadcast ephemeris, juga digunakan data precise
ephemeris. GAMIT memerlukan sembilan macam input dalam proses pengolahannya (Herring, 2010) :
1. Raw data dari data pengamatan GPS,
2. File navigasi, berupa file navigasi global yang diunduh melalui situs IGS,
3. File GPS Ephemeris yang didapat dari IGS dalam format SP3.
4. lfile yang berisi koordinat geosentrik dari semua stasiun pengamatan IGS atau titik ikat yang digunakan,
5. File station.info yang berisi data informasi tentang stasiun yang mencakup stasiun-stasiun pengamatan yang digunakan, tempat/lokasi stasiun, tinggi
antena, model antena, model receiver, waktu pengamatan (tahun, doy = day
of year), start (waktu mulai) dan stop (waktu berhenti) tiap sesi pengamatan,
serta firmware yang digunakan oleh receiver,
6. sittbl. File ini berisi nilai constraint yang diberikan kepada setiap stasiun stasiun pengamatan maupun titik ikat,
7. File sestbl yang berfungsi sebagai input control table untuk fixdrv, berisi
spesifikasi tipe analisis dan apriori kesalahan pengukuran serta constraint
satelit,
9. sites.default. File berisi daftar stasiun yang digunakan dalam proses pengolahan data menggunakan perangkat lunak GAMIT.
Selain menggunakan GAMIT untuk pengolaahan data, diperlukan juga
perangkat lunak GLOBK (Global Kalman Filter VLBI and GPS Analysis Program)
untuk proses lanjutan. GLOBK adalah satu paket program yang dapat mengkombinasikan hasil pemrosesan data survei terestris ataupun data survei
ekstra-terestris. Data input yang dijadikan kunci utama pada GLOBK adalah matrik
kovarian dari data koordinat stasiun, parameter rotasi bumi, parameter orbit, dan
koordinat hasil pengamatan lapangan (Herring, dkk., 2010). Hfile hasil pengolahan
GAMIT dijadikan sebagai data input dalam program GLOBK. Aplikasi yang dapat
dijalankan oleh GLOBK antara lain :
1. mengombinasikan hasil pengolahan individu (misal: harian) untuk
menghasilkan koordinat stasiun rata-rata dari pengamatan yang dilakukan lebih dari satu hari,
2. mengombinasikan hasil pengamatan multiple year untuk menghasilkan
koordinat stasiun serta vektor kecepatan pergeseran,
3. melakukan estimasi koordinat stasiun dari pengamatan individu, yang
digunakan untuk menyederhanakan data runut waktu (time series) dari
pengamatan teliti harian atau tahunan,
sedangkan yang tidak dapat dilakukan oleh GLOBK adalah antara lain :
1. membuat sebuah model linier, karena terdapat banyak proses perataan yang
dijalankan pada koordinat stasiun dan parameter orbit,
2. mengoreksi cycle slips, data yang buruk dan atmospheric delay modelling
errors,
3. melakukan resolving ambiguitas fase.
I.7.6.Perataan Jaring Pada GAMIT
Perangkat lunak GAMIT menggunakan data pseudorange dan carrier phase.
Metode diferensial yang digunakan adalah double differencing. Prinsip perataan yang
dipakai adalah metode parameter berbobot. Berikut ini persamaan observasi dengan menggunakan data fase (Taftazani, 2013):
Sebagai contoh apabila terdapat dua receiver yang berada pada stasiun A dan B
yang mempunyai vektor koordinat XA, YA, ZA pada stasiun A dan XB, YB, ZB pada
stasiun B dan melakukan pengamatan terhadap dua satelit yaitu i dan j maka
persamaan double difference menjadi (Taftazani, 2013):
2
2
2 A i A i A i i A X t X Y t Y Z t Z
... (I.8)
2
2
2 B j B j B j j B X t X Y t Y Z t Z
... (I.9) Dengan koordinat stasiun A dianggap memiliki suatu nilai pendekatan yaitu
0 0 0
,
, A A
A Y Z
X sehingga persamaannya menjadi:
XA = X0A + dXA
YA = Y0A + dYA ... (I.10)
ZA = Z0A + dZA
Kemudian persamaan (I.8) dan (I.9) dilinearisasi menjadi :
...(I.11) …...(I.12) Selanjutnya dilakukan substitusi persamaan di atas ke dalam persamaan (I.13),
sehingga menghasilkan penyelesaian double difference sebagai berikut:
- ... ..(I.14)
Kemudian diperoleh solusi dari double diffrence seperti yang ditunjukkan pada
persamaan I.15 berikut:
ij AB A ij A ij A ij ij AB ij AB ij AB t rC t t cx t dX cy t dY cz t dZ N L 0 . . . . ...(I.15)Selanjutnya dilakukan penerapan metode parameter berbobot pada persamaan (I.7) sehingga menjadi :
L’a = Xa ... (I.16) Matrik bobot ditunjukkan pada persamaan (I.17) dan persamaan matrik residu pada (I.18) sebagai berikut :
[ ] ... (I.17)
j
B B j B j j B j B A i A i A i i A i A dZ t cz dY t cy dX t cx t dZ t cz dY t cy dX t cx t . . . . . . V = A X + L ... (I.18) Dimana :
cx t cy t cz t A ABij ABij ABij ... (I.19)
L t t
L ABij ij AB ... (I.20) AB A A A N dZ dY dX X …………..……….…………...(I.21)Maka hasil persamaan observasi yang telah dilinierisasi menjadi :
b b b Z Z Y Y X X L 0 0 0 ' ………...(I.22) Keterangan: L = matrik observasi A = matrik desain X = matrik parameter
ρ = jarak geometri antara satelit dengan titik pengamatan
N = ambiguitas fase
i,j = satelit yang teramat
A, B = stasiun pengamatan
(x0,y0,z0) = koordinat pendekatan titik
Setelah melakukan perataan jaring dengan menggunakan GAMIT, proses
selanjutnya yaitu melakukan pengikatan ke kerangka referensi ITRF dari loosely
constrained network dengan menggunakan GLOBK.
I.7.7.Evaluasi Hasil Pengolahan GAMIT
Evaluasi hasil pengolahan dengan menggunakan perangkat lunak GAMIT dapat dilakukan dengan memperhatikan dua parameter evaluasi GAMIT, yaitu nilai
Postfit nrms merupakan perbandingan nilai varians aposteriori dan varians
apriori untuk unit bobot. Standar kualitas postfit nrms adalah ± 0,25. Apabila nilai
postfit nrms lebih besar dari 0,5 maka mengindikasikan masih terdapat efek cycle slip
yang belum dihilangkan berkaitan dengan parameter bias ekstra atau terdapat
kesalahan dalam pemodelan (Herring, 2010). Nilai postfit nrms dirumuskan seperti
pada persamaan I.23 (Taftazani, 2013):
√ ... (I.23) Dengan nilai
... (I.24) Keterangan :
= varian apriori untuk bobot
= varian aposteriori untuk bobot
n = jumlah ukuran
u = ukuran minimum
Nilai fract merupakan perbandingan antara nilai adjust dan nilai formal, yang
digunakan untuk menganalisis perlu tidaknya dilakukan iterasi. Iterasi ini dilakukan
untuk mendapatkan nilai adjust yang bebas dari efek non-linear. Nilai adjust
menunjukkan besarnya koreksi yang diberikan terhadap nilai pendekatan yang
digunakan dalam perhitungan. Nilai formal disebut juga nilai formal error. Nilai
formal menunjukkan ketidakpastian pada pemberian data bobot untuk perhitungan
kuadrat terkecil. Besar nilai fract tidak boleh lebih dari 10 (fract< 10) (Herring,
2010).
fract =
... .(I.25)
I.7.8.Perataan Jaring Pada GLOBK.
Proses hitungan pada GLOBK merupakan proses Kalman Filter untuk
mengkombinasikan solusi-solusi hasil pengolahan data pengamatan. Ada tiga program utama dalam perangkat lunak GLOBK, yaitu GLOBK, GLRED, dan
GLORG. GLOBK merupakan proses Kalman Filtering untuk mengkombinasikan
data pengolahan harian GAMIT dan untuk mendapatkan estimasi posisi rata-rata titik
dan rotasi) untuk analisis data. Program ini melakukan pengikatan ke kerangka
referensi setelah data dikombinasikan oleh GLOBK dengan loose constraints dan
menerapkan nilai constraint pada solusi yang telah dikombinasikan. GLRED
melakukan perhitungan posisi harian, sehingga ketelitian posisi yang diperoleh dapat dibandingkan per-waktu tertentu.
Pada pengolahan lanjutan menggunakan GLOBK, hasil pengolahan perataan jaring bebas pada GAMIT kemudian diikatkan ke kerangka referensi ITRF. Perataan
yang dilakukan melibatkan titik ikat (titik yang dianggap fixed) dalam menentukan
posisi.
I.7.9.Evaluasi Hasil Pengolahan GLOBK.
Hasil pengolahan pada GLOBK dapat dievaluasi melalui log file yang berisi
nilai simpangan baku yang dapat digunakan untuk menganalisis koordinat stasiun
observasi dan nilai chi-square per degree of freedom. Selain itu, dilakukan pula
analisis pada plot time series untuk mengetahui outliers yang terjadi dan konsistensi
data harian. Nilai wrms juga digunakan untuk mengevaluasi hasil dari pengolahan
GLOBK. Menurut Lestari 2006, nilai wrms yang baik adalah di bawah 10 mm.
I.7.10.Perhitungan Kecepatan
Besar kecepatan pergeseran stasiun GPS dihitung menggunakan rumus:
... (1.26) Keterangan:
Xt = koordinat stasiun pengamatan pada epok t,
= koordinat stasiun pengamatan pada epok t0,
V = kecepatan pergeseran.
Resultan vektor pergesersan kemudian dihitung dengan menggunakan rumus:
√ ... (1.27) Keterangan:
VR = resultan kecepatan pergeseran,
Vn = kecepatan pergeseran pada komponen northing,
Ve = kecepatan pergeseran pada komponen easting.
Arah vektor pergeseran dihitung dengan menggunakan rumus :
Keterangan:
α = arah vektor pergeseran horizontal.
I.7.11.Regangan
Regangan atau strain didefinisikan sebagai perubahan relatif dari posisi
parikel-partikel suatu benda yang ditimbulkan karena adanya stress terhadap posisi
asalnya. Terdapat dua jenis regangan, yaitu :
I.7.11.1.Regangan Normal atau Normal Strain. Regangan ini merupakan
perubahan panjang suatu benda. Regangan normal dibagi dalam dua kategori :
1. Kompresi atau pemendekan suatu benda akibat gaya tertentu
Gambar I. 1. Kompresi (Sumber
www.aaaaspecialties.com/blog/industrustrial-compression-springs-vs-extension-springs/)
2. Ekstensi atau pemanjangan suatu benda akibat gaya tertentu
Gambar I. 2. Ekstensi (Sumber
www.aaaaspecialties.com/blog/industrustrial-compression-springs-vs-extension-springs/)
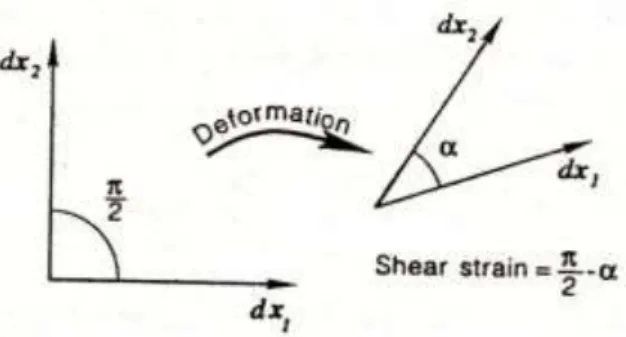
I.7.11.2.Regangan Geser atau Shear Strain. Regangan ini merupakan
perubahan wujud suatu benda yang meliputi perubahan sudut (Davis, 1996).
I.7.12.Perangkat grid_strain 2D
Perangkat grid_strain 2D merupakan perangkat lunak yang digunakan untuk
menghitung nilai regangan dan melakukan plotting regangan pada perpotongan grid
dalam 2D. Perangkat lunak ini berbasis Matlab yang dibuat dan dikembangkan oleh Giordano Tezaa, Arianna Pesci, dan Antonio Galgaro dari Universitas Padova, Italia.
Perhitungan regangan dilakukan menggunakan pendekatan Modified Least
Square (MLS). Diberikan sebuah kerangka referensi, dimana adalah
posisi titik P yang dikelilingi oleh N experimental point (EP) yang memiliki posisi
dan pergeseran ( ) dan ( ) dengan nilai n=1,2,…,N .
Pada pendekatan linear, pergeseran kecil disekitar titik P dapat dimodelkan oleh persamaan (1.29) berikut (Tezaa,2008):
(i, j = 1,2) ... (I.29)
Dimana
= posisi relatif dari EP dan P ke-n,
= elemen dari gradient pergeseran L
Ui = konstanta.
Kondisi bidang regangan diasumsikan sama, sehingga komponen gradien
pergeseran dan kesalahannya dapat diestimasi dengan metode pendekatan least
square. Model fungsional dari least square adalah:
... (I.30) u = [u(1) u(2) … u(n)]T ... (I.31) Dimana matrik A = ... (I.32) I = [U1 U2 L11 L12L21 L22]T ... (I.33) Keterangan: u = pseudo-observable vector,
A = matrik berisi informasi mengenai posisi dari EP,
I = parameter vektor yang berisi komponen gradient pergeseran yang
akan diestimasi.
Matrik A diasumsikan memiliki nilai kesalahan yang dapat diabaikan, dengan
kata lain hanya kesalahan pada pseudo-observable vector. Dalam pendekatan Least
Square, vektor residual turut dipertimbangkan, sehingga persamaan (I.35) menjadi
... (I.34) Vektor parameter I dihitung dengan minimalisasi vektor residual. Diberikan W adalah matrik kovarian dari data. Asumsikan bahwa data yang digunakan tidak berkolerasi, W adalah 2N x 2N matrik diagonal.
... (I.35)
= ∑ ∑ . ... (I.36) Dalam hal ini :
= varian dari komponen ke-j dari vektor pergeseran ke-n
Residual minimum didapatkan dari meminimalkan bentuk kuadrat
, sehingga didapat persamaan :
̂ ... (I.37) Dalam hal ini :
̂ ... (I.38)
( ̂) ... (I.39)
... (I.40) Keterangan:
r = redundansi dari least square
Dari persamaan (I.35) sampai (I.40) terbukti bahwa data yang dipengaruhi oleh ketidakpastian yang besar memiliki efek yang kecil terhadap proses perhitungan, sehingga kontribusi dari satu atau lebih EP dapat direduksi dan dibuang dengan
mempertimbangkan faktor pembobotan yang baik dapat meningkatkan
corresponding errors. Titik-titik grid ke-ij didefinisikan dengan rumus :
( ) ... (I.41)
Keterangan :
( = koordinat dari starting point
= grid sides
Nx,Ny = titik perpotongan grid sepanjang sumbu X dan Y
Nilai faktor skala atau smoothing parameter yang digunakan secara default
adalah tiga kali grid spacing. Faktor skala menentukan perhitungan regangan. Secara
umum, jika titik-titik yang digunakan tersebar secara merata, regangan lokal dapat diestimasi di tiap titik perpotongan grid menggunakan strategi pembobotan untuk mengurangi kontribusi dari stasiun yang jauh dari perpotongan grid. Fungsi
pembobotan yang digunakan adalah dimana adalah jarak antara titik
perpotongan grid dengan grid stasiun dan adalah smoothing parameter. Seperti
yang telah disebutkan, besarnya regangan seharusnya didistribusikan secara merata, namun dalam kasus nyata asumsi ini tidak dapat dipenuhi. Jika digunakan pendekatan MLS, distribusi merata regangan hanya dilakukan di area sekitar titik yang dihitung dengan metode yang sering digunakan dalam geostatistik (kriging dan simulasi sequensial).
Perhitungan gradien pergeseran L dengan menggunakan Modified Least Square
(MLS) untuk setiap titik perpotongan grid dirumuskan sebagai berikut :
... (I.42) ... (I.43) ... (I.44) Keterangan : E = regangan tensor = elemen rotasi L
= pergeseran untuk i =1 (i=2)
= operator derivative parsial / x ( / y ) untuk i =1 (i=2)
Regangan tensor (E) bersifat simetris dan merepresentasikan deformasi
internal, sedangkan bersifat antisimetris dan merepresentasikan pergerakan yang
kaku atau kecil. Matrik L, E dan dirumuskan sebagai berikut :
[
[ ( ) ( ) ] * + ... (I.51) [ ( ) ( ) ] * +... (I.52)
Regangan yang dihitung direpresentasikan dalam principal strain (ekstensi dan
kompresi) dalam grid regular. Ekstensi bernilai positif dan kompresi bernilai negatif. Pada kerangka referensi yang memiliki origin pada titik perpotongan grid dan unit
vektornya merupakan orthonormal eigenvectors, tidak terdapat shear deformation
dan variasi hanya terjadi sepanjang sumbu utama. Regangan tensor E bersifat real,
simetris dan bisa didiagonalkan, sehingga akan terdapat invertible matrik V didalam
, dimana adalah matrik diagonal. Eigenvalue adalah nilai maksimum
dan minimum dari principal strain dan . Regangan maksimum dan
minimum ( dan ) adalah perubahan panjang per unit panjang dalam arah
regangan maksimum dan minimum.
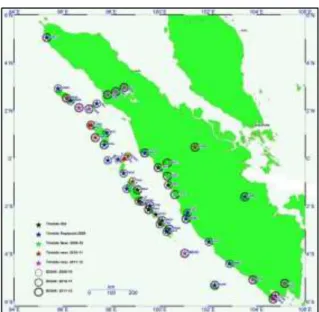
I.7.13.Sumatran GPS Array
Sumatran GPS Array (SuGAr) merupakan stasiun CORS yang tersebar
sepanjang 1300 km di pantai barat Pulau Sumatera. Sumatran GPS Array (SuGAr)
diinisiasi oleh Professor Kerry Sieh, dkk., dari the California Institute of Technology
(CalTech) Tectonics Observatory (TO) bekerjasama dengan LIPI pada tahun 2002. Saat ini terdapat 55 stasiun yang setiap harinya merekam data GPS dengan akurasi
tinggi secara kontinyu, dan mengirimkan data ke server pusat untuk postprocessing
di Singapura. Solusi dari data SuGAR digunakan untuk mendukung pengukuran deformasi bumi seperti mendeteksi pergerakan tektonik dan membantu dalam memahami peristiwa seismik pada area dengan tingkat atifitas tektonik yang tinggi ini. Data SuGAr dapat diunduh pada situs transfer ftp://eos.ntu.edu.sg/SugarData/ (McCaughey, 2012).
Gambar I. 4. Persebaran stasiun SuGAr ( McCaughey, 2012)
I.8.Hipotesis
Seperti yang telah diuraikan dalam tinjauan pustaka, stasiun Sumatran GPS
Array (SuGAr) diperkirakan akan bergeser ke arah timur laut. Regangan yang terjadi akan terdiri dari kompresi dan ekstensi. Kompresi terbesar akan terjadi di sekitar kepulauan Mentawai (stasiun ABGS, MSAI, PARY, dan PSKI), sedangkan ekstensi terbesar akan terjadi di daerah selatan pantai barat Pulau Sumatera (stasiun KTET, MKMK, BSAT).