BAB 3
PERANCANGAN DAN PEMBUATAN SISTEM
3.1. Perancangan Sistem
Dalam membuat suatu alat ada beberapa hal yang perlu diperhatikan, yaitu bagaimana
cara merancang sistem yang akan diimplementasikan pada alat. Dalam perancangan
sistem terlebih dahulu dibuat flowchart dari sistem tersebut, seperti gambar 3.1.
Prinsip kerja alat yang dibuat adalah alat yang mendeteksi keamanan
berdasarkan parameter sensitifitas yang telah disediakan, ada dua alat yang akan
dibuat yaitu modul server dan modul sensor. Modul serveradalah server tempat
penyimpanan konfigurasi , pemrosesan data, pengolahan data. Modul sensor hanya
menerima perintah dari server dan mengirimkan data sensor ke Modul server.
Untuk carakerja nya Modul server dan sensor dinyalakan terlebih dahulu,
modul server menginisialisasi pengaturan yang disimpan dan mulai menjalankan
service , pada langkah awal modul server akan membuat perintah berbentuk string yang akan dikirimkan ke modul sensor melewati modul NRF2401L. seperti informasi
device , informasi sensor dan alaram. Ketika perintah yang dikirimkan tadi diterima
oleh modul sensor maka modul akan merespon apakah data sensor perlu dikirimkan
atau alarm perlu dinyalakan. Semua informasi perintah ada di dalam string yang
dikirimkan modul server. Selanjutnya modul sensor akan mengirimkan balik data
yang diperlukan modul server seperti informasi nilai sensor dan kemudian modul
server mongolah data tersebut untuk kemudian diperiksa apakah melewati nilai
sensitifitas. Jika melebihi atau sama dengan data sensitifitas yang sudah dibuat maka
3.2. Blok Diagram
Diagram blok merupakan salah satu bagian terpenting dalam perancangan peralatan
elektronika, karena dari diagram blok dapat diketahui prinsip kerja keseluruhan dari
rangkaian elektronika yang dibuat. Sehingga keseluruhan blok dari alat yang dibuat
dapat membentuk suatu sistem yang dapat bekerja sesuai dengan perencanaan.
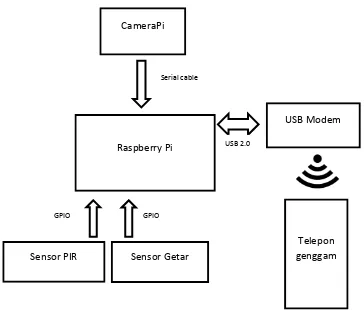
Diagram blok dari sistem keamanan dapat di lihat pada gambar 3.2
Gambar 3.2 Blok Diagram
Pada gambar 3.2 diatas terdapat beberapa komponen perangkat keras sistem
keamanan, antara lain:
1. Raspberry Pi merupakan rangkaian komponen yang berfungsi sebagai server
utama pengolahan data dan konfigurasi sistem.
3. Usb modem merupakan alat yang nantinya sebagai notifikasi kepengguna dalam bentuk SMS.
4. Sensor PIR merupakan sensor yang mendeteksi keberadaan manusia dengan
infrared.
5. Sensor Getar merupakan komponen yang berfungsi memberi nilai ketika ada
getaran.
6. NRF2401L merupakan komponen yang berfungsi untuk komunikasi nirkabel
antar modul.
3.3. Desain Alat Sistem Keamanan
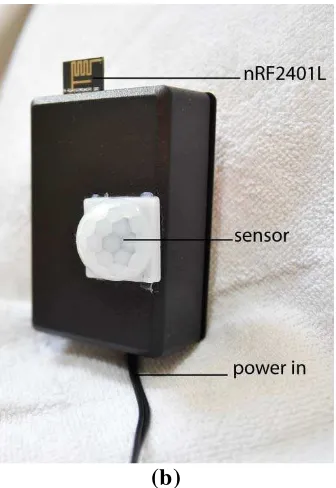
Ada dua bentuk alat sebagai wadah dari modul server dan modul sensor. Untuk modul
server digunakan raspberry case dengan mout camera yang dapat dibeli ditoko elektronika juga untuk modul sensor yaitu dengan menggunakan Box housing X1 yang ukurannya disesuaikan dengan komponen dengan sedikit perubahan. Case dari alat
dapat dilihat pada gambar 3.3 (gambar a dan b).
(b)
Gambar 3.3 Desain Alat Sistem Keamanan
3.4. Perancangan Alat (Hardware)
Perancangan hardware merupakan suatu tahap yang sangat penting dalam pembuatan suatu alat, sebab dengan menganalisa komponen yang digunakan maka alat yang akan
dibuat dapat bekerja seperti yang diharapkan. Untuk mendapatkan hasil yang optimal,
terlebih dahulu membuat rancangan yang baik yaitu dengan memperhatikan sifat dan
karakteristik dari tiap-tiap komponen yang digunakan sehingga dapat menghindari
kerusakan pada komponen yang digunakan dan mempermudah dalam pengerjaannya.
Berikut adalah beberapa komponen penting untuk menunjang kebutuhan alat
yang akan dibuat:
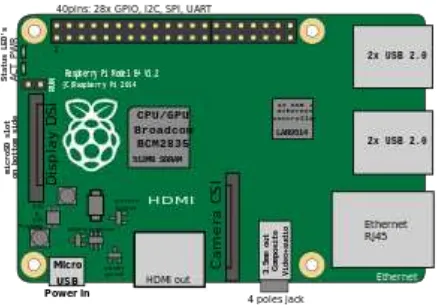
3.4.1 Raspberry Pi
Raspberry Pi merupakan sebuah komputer berukuran kecil yang dapat digunakan
seperti sebuah Personal Computer (PC). Dikatakan kecil karena kurang lebih ukurannya sebesar kartu nama dan untuk dapat menghidupkannya dapat menggunakan
charger / adaptor yang biasa digunakan pada telepon selular sebesar 5V. Raspberry Pi
Gambar 3.4 Rangkaian Raspberry pi
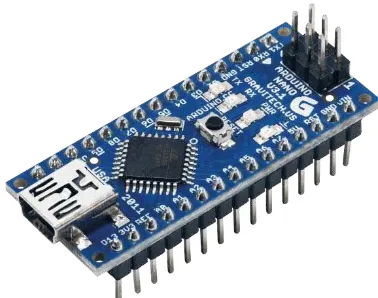
3.4.1. Arduino Nano
Arduino adalah sebuah modul mikrokontroller yang berfungsi sebagai media interface dan proses input/output. Arduino merupakan modul mikrokontroller yang tidak perlu adanya perancangan tambahan untuk menggunakannya, hanya saja dibutuhkan shield atau perangkat yang sesuai untuk membuat proyek tambahan.
Gambar 3.5 Skema Rangkaian Arduino Nano
Prinsip kerja rangkaian mikrokontroller diatas menggunakan fasilitas
input/output yang merupakan fungsi untuk dapat menerima sinyal masukan (input) dan memberikan sinyal keluaran (output). Sinyal input maupun sinyal output merupakan sinyal digital 1 (HIGH, mewakili tegangan 5 volt) dan 0 (LOW, mewakili
analog. Dalam perancangan ini diperlukan beberapa pin input/output digital untuk mengendalikan sensor, Nrf2401L. Modul Arduino Nano dapat dilihat pada gambar 3.6 berikut ini.
Gambar 3.6 Tampilan Board Arduino Nano
3.4.3.Modul wireless NRF24L01
Komunikasi nirkabel antar perangkat mikrokontroler maka modul nRF24L01 adalah
perangkat yang dirancang untuk komunikasi jarak jauh yang memamfaatkan pita
gelombang RF 2.4 GHz ISM (Industrial, Scientific and Medical). Modul ini menggunakan antarmuka SPI untuk berkomunikasi. Tegangan kerja dari modul ini
adalah 3V DC, nantinya masing masing modul akan dihubungkan kerangkaian
NRF24L01 ini.
3.5 Perancangan Elektronika
Perancangan elektronik pada alat Sistem keamanan secara keseluruhan menggunakan
komponen yang telah jadi, seperti Raspberry Pi, Pi camera, Arduino Nano,
NRF24L01, sensor pir dan getar,usb modem, usb wifi,Buzzer dan power supply.
3.5.1. Rangkaian NRF24L01 dengan Raspberry dan Arduino
Raspberry B+ memiliki 40 PIN GPIO dan Arduino Nano memiliki 14 pin digital dan
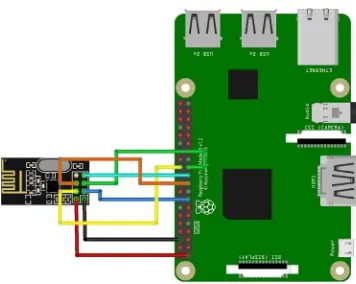
Gambar 3.7 Rangkaian NRF24L01 pada Raspberry
Pin yang digunakan NRF24L01 pada Raspberry adalah:
1. Pin VCC dihubungkan dengan 3.3V
2. Pin GND dihubungkan dengan GND
3. Pin CSN dihubungkan dengan GPIO 8
4. Pin CE dihubungkan dengan GPIO 17
5. Pin MOSI dihubungkan dengan GPIO 10
6. Pin MISO dihubungkan dengan GPIO 9
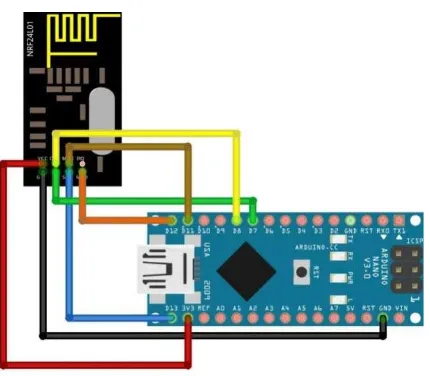
Gambar 3.8 Rangkaian NRF24L01 pada Arduino
Pin yang digunakan NRF24L01 pada Arduino Nano adalah:
1. Pin VCC dihubungkan dengan 3.3V
2. Pin GND dihubungkan dengan GND
3. Pin CSN dihubungkan dengan Digital 10
4. Pin CE dihubungkan dengan Digital 9
5. Pin MOSI dihubungkan dengan Digital 11
6. Pin MISO dihubungkan dengan Digital 12
7. Pin SCK dihubungkan dengan Digital 13
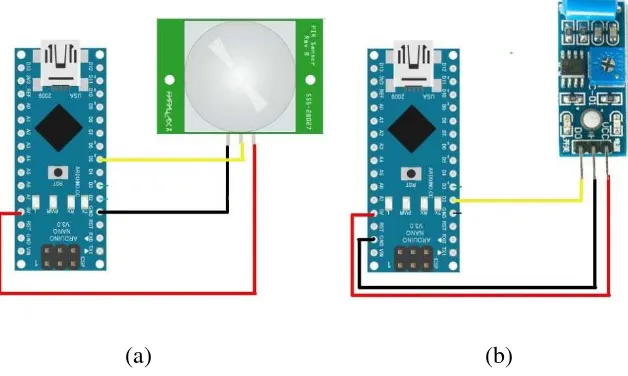
3.5.2. Rangkaian Sensor dengan Arduino Nano
Pada perancangan alat ini sensor digunakan sebagai alat yang mendeteksi perubahan
fisika yang akan digunakan pada modul sensor untuk mendeteksi pencuri. Untuk
bekerka maksimal sensor dihubungkan dengan digital pin pada arduino seperti gambar
(a) (b)
Gambar 3.9 Rangkaian Sensor pada Arduino
Pin yang digunakan Sensor pada Arduino adalah :
1. Sensor PIR dihubungkan dengan Digital 5 yang berfungsi untuk mendeteksi
perubahan panas oleh gerakan manusia
2. Sensor Getar dihubungkan dengan Digital 2 yang berfungsi untuk mendeteksi
perubahan getaran pada modul sensor.
3.5.3. Rangkaian Buzzer dengan Arduino
Pada perancangan ini Buzzer digunakan untuk alarm pada modul sensor , Pin yang
digunakan pada buzzer ini adalah Pin 7. Gambar 3.10 berikut adalah gambar
rangkaian buzzer pada arduino.
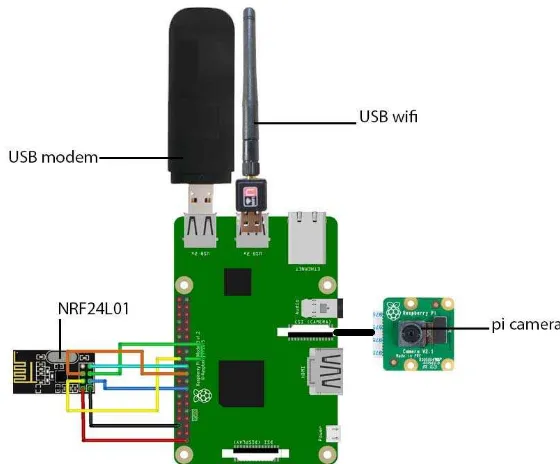
3.5.4 Rangkaian Alat Secara Keseluruhan
Pada gambar 3.11 dan gambar 3.12 dibawah dapat dilihat seluruh gabungan dari
sistem keamanan , dibagi menjadi dua yaitu Modul server dan Modul sensor. Namun
untuk modul server hanya NRF24L01 yang berinteraksi dengan GPIO selebihnya
untuk kamera, modem, peranti wifi menggunakan sistem plug-in.
Gambar 3.11 Rangkaian Sistem Modul Server
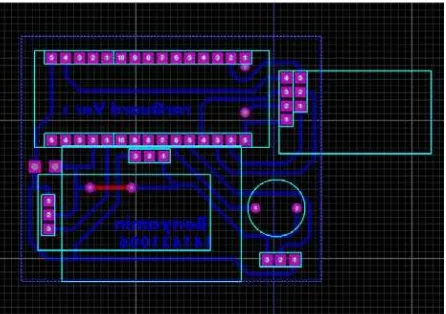
3.6. Perancangan PCB (Printed Circuit Board)
Printed Circuit Board (PCB) adalah sebuah papan rangkaian yang terbuat dari bahan ebonit (Pertinax) atau fiber glass dimana salah satu sisi permukaanya dilapisi dengan tembaga tipis. Jenis ini umumnya disebut singleside karena hanya memiliki satu permukaan yang berlapiskan tembaga. Sedangkan PCB yang ke dua sisinya digunakan
untuk pembuatan rangkaian yang bersifat kompleks dan rumit, sehingga ke dua bagian
sisinya dapat difungsikan sebagai jalur dan tempat komponen-komponen.
Perancangan PCB pada pembuatan alat sortir buah ini menggunakan software ISIS & ARES Proteus 8.0. Proteus adalah sebuah software berbasis windows yang
dapat digunakan untuk mendesain PCB yang juga dilengkapi dengan simulasi pspice pada level skematik sebelum rangkaian skematik di cetak pada PCB.
Dengan perancangan yang tepat akan didapatkan layout PCB yang tersusun rapi dan mudah digunakan. Lebar dan jarak antara jalur juga harus diperhitungkan
agar tidak terjadi kesalahan atau hubungan singkat akibat jalur yang terlalu rapat dan
sempit.
Gambar 3.13 Layout PCB Shield Arduino dan LCD
Tata letak komponen adalah susunan komponen-komponen elektronika dari gambar
diagram skematik yang akan dipasangkan pada permukaan PCB yang berkebalikan
dengan jalur PCB. Susunan komponen elektronika tersebut harus bersesuaian dengan
jalur PCB. Setiap komponen yang akan dipasang mempunyai ukuran harus
bersesuaian dengan jalur PCB. Setiap komponen yang akan dipasang mempunyai
Gambar 3.14 Print out PCB
3.7. Perancangan Perangkat Lunak (Software) Sistem Keamanan
Perancangan perangkat lunak dibuat melalui software IDE (Integrated Developer Environment) Arduino itu sendiri dengan menggunakan bahasa C. Pada sistem penyortiran ini, program dibuat agar dapat menerima input dari NRF24L01 yang dikirimkan dari modul server dan memberikan outputlagi ke NRF24L01 mengirim data sensor ke modul server.
Perangkat keras sebagai pengendali tidak dapat bekerja jika tidak disertai
dengan perangkat lunak sebagai pengatur fungsi kerja keseluruhan sistem. Perangkat
bertugas untuk menentukan langkah-langkah yang harus dilakukan arduino baik input maupun output pada keseluruhan sistem, sehingga nantinya dapat ditentukan arah
kendali atau proses dari sistem yang dibuat. Arduino merupakan pengendali utama dari keseluruhan sistem modul sensor. Arduino tidak akan bisa berfungsi jika
BAB 4
IMPLEMENTASI DAN PENGUJIAN
4.1. Implementasi Sistem
Implementasi merupakan tahap kelanjutan dari perancangan dan pembuatan alat. Hasil
dari implementasi ini nantinya adalah sebuah alat yang siap diuji dan digunakan.
Implementasi Sistem keamanan perancangan rangkaian elektronika Modul sensor.
4.1.1. Implementasi Rangkaian Elektronika Modul sensor
Implementasi rangkaian sistemkeamanan dilakukan dengan menggunakan papan PCB
single layer. Papan PCB digunakan karena peletakan komponen yang lebih rapi dan mengurangi resiko komponen yang terlepas karena sudah menyatu pada papan PCB
dengan cara di solder.
Tahapan-tahapan implementasi rangkaian elektronika alat sortir pada papan
PCB akan dijelaskan sebagai berikut:
1. Pembuatan layout PCB. Pembuatan layout dilakukan dengan membuat gambar skematik rangkaian dengan menggunakan software Proteus 8 ISIS. Skematik adalah rangkaian gambar yang menghubungkan komponen-komponen pada
Gambar 4.1 Pembuatan Layout PCB
2. Layout PCB dicetak pada kertas foto menggunakan printer laser. Hasil pencetakan layout pada kertas foto kemudian di sablon diatas PCB dengan cara permukaan layout gambar di letakkan diatas lapisan tembaga pada papan PCB, kemudian dipanaskan menggunakan setrika listrik agar layout pada
kertas foto menempel pada permukaan tembaga papan PCB. Hasil pencetakan
dan penyablonan layout pcb dapat dilihat pada gambar 4.2.
Gambar 4.2 Hasil Pencetakan dan penyablonan PCB
3. Tahap pelarutan PCB. Pelarutan papan PCB menggunakan larutan
ferrichloride (FeCl3) dengan cara memasukkan papan PCB kedalam larutan
ferrichloride (FeCl3) hingga tembaga pada papan PCB yang tidak tertutup oleh
Gambar 4.3 Pelarutan PCB dengan Ferrichloride(FeCl3)
4. Tahap pengeboran PCB. PCB yang telah larut harus melalui tahap pengeboran
dahulu sebelum digunakan. Pengeboran dilakukan menggunakan mata bor 0,8
mm untuk peletakan komponen yang akan di solder pada papan PCB. Pengeboran dapan dilihat pada gambar 4.4.
Gambar 4.4 Pengeboran PCB
5. Setelah proses pengeboran selesai, komponen diletakkan pada papan PCB sesuai lubang peletakan komponen untuk selanjutnya dilakukan penyolderan.
Gambar 4.5 Peletakan dan Penyolderan Komponen
4.2. Implementasi Perangkat Lunak (Software)
Implementasi program disini ada dua peran baik di modul server maupun dimodul
sensor, pada modul sensor mikrokontroller arduino dibuat menggunakan bahasa
pemrograman C. Sedangkan pada modul server menggunakan bahasa python sebagai
bahasa pemograman inti dan PHP HTML untuk interface pengaturan dan monitoringnya.
4.2.1 Implementasi perangkat lunak Modul Sensor
Software yang digunakan untuk membuat program adalah editor dan compiler
Arduino. File program berekstensi *.ino file yang sudah dikompilasi akan di upload kedalam mikrokontroller arduino. Penulisan kode/script yang ditanamkan (embed) pada software IDE arduino dapat dilihat pada gambar 4.6 dan kode/script pemograman mikrokontroler arduino secara keseluruhan dapat dilihat pada lampiran
A.
Gambar 4.6 Software IDE Arduino
4.2.2 Implementasi Software
uploadkedalam mikrokontroller arduino. Penulisan kode/script yang ditanamkan (embed) pada software IDE arduino dapat dilihat pada gambar 4.8 dan kode/script pemograman mikrokontroler arduino secara keseluruhan dapat dilihat pada lampiran
A.
4.3. Pengujian Alat
Pengujian bertujuan untuk menemukan kekurangan pada alat dan memastikan apakah
alat yang telah dibuat dapat berjalan dengan baik. Pengujian alat yang dilakukan
meliputi pengujian sensor PIR, sensor Geter, modul NRF24L01 dan pengujian alat
secara keseluruhan.
4.3.1. Pengujian Sensor PIR
Pengujian dilakukan untuk mengetahui apakah rangkaian sensor PIR dapat berjalan
dengan baik dan bisa menampilkan nilai deteksi HIGH dan LOW. Pengujian dilakukan dengan menghubungkan pin output sensor warna pada pin Digital 2. Berikut adalah program untuk pengujian sensor PIR.
pirState = LOW; }
} } }
Gambar 4.7Hasil pembacaan motion dengan serial monitor
Dari gambar 4.7 dapat kita lihat bahwa sensor PIR mampu mendeteksi motion sesuai dengan prakteknya. Nilai motion yang di dapat berupa HIGH dan LOW berasal dari
halangan yang diberi didepan sensor.
4.3.2. Pengujian Sensor Getar
Pengujian dilakukan untuk mengetahui apakah rangkaian sensor Getar dapat berjalan
dengan baik dan bisa menampilkan nilai getaran. Pengujian dilakukan dengan
menghubungkan pin output sensor warna pada pin Digital 5. Berikut adalah program untuk pengujian sensor getar.
int EP = 5;
return measurement; }
Gambar 4.8Hasil pembacaan nilai getaran dengan serial monitor
Dari gambar 4.8 dapat kita lihat bahwa sensor getar mampu menghasilkan nilai
getaran sesuai dengan prakteknya. Nilai getar yang di dapat berupa range 0 – nilai
tertentu berasal dari getaran hasil kontak langsung dengan sensor.
4.3.3. Pengujian komunikasi nirkabel antara Arduino Nano dan Raspberry
Pengujian dilakukan untuk mengetahui apakah rangkaian ini dapat berkomunikasi satu
dengan yang lainnya dan dapat mengirimkan data juga dapat menerima data. Pada
pengujian ini masing masing dipasangkan modul NRF24L01 pada Raspberry dan
Arduino nano kemudian dibuat kode untuk mengirimkam data pada masing masing
device.
Pada percobaan ini arduino nano mengirim kalimat “Hello World” ke raspberry Pi dengan kode berikut :
#include <SPI.h>
#include <RF24.h>
void setup() {
const char text[] = "Hello World";
radio.write(&text, sizeof(text));
delay(1000);
}
Pada Raspberry juga dibuatkan kode untuk menerima kiriman dari arduino. Perlu
diketahuibahwa panjang data yang dapat dikirimkan dari NRF24L01 hanya sebanyak
32 karakter saja untuk panjang maksimum.
import RPi.GPIO as GPIO
from lib_nrf24 import NRF24
import time
import spidev
GPIO.setmode(GPIO.BCM)
pipes = [[0xE8, 0xE8, 0xF0, 0xF0, 0xE1],
[0xF0,0xF0,0xF0,0xF0,0xE1]]
radio = NRF24(GPIO, spidev.SpiDev())
radio.begin(0,17)
radio.setPayloadSize(32)
radio.setChannel(0x76)
radio.setDataRate(NRF24.BR_1MBPS)
radio.setAutoAck(True)
radio.enableDynamicPayloads()
radio.enableAckPayload()
radio.openReadingPipe(1,pipes[1])
radio.printDetails()
radio.startListening()
while True:
while not radio.available(0):
time.sleep(1/100)
receiveMessage = []
radio.read(receiveMessage,
radio.getDynamicPayloadSize())
print("Received: {}".format(receiveMessage))
print("Translate dari unicode karakter...")
string = ""
for n in receiveMessage:
if(n>=32 and n <= 126):
string += chr(n)
print("pessan kita yang di dekode menjadi :
Gambar 4.9Hasil penerimaan data pada Raspberry dari Arduino
Dari gambar 4.9 dapat kita lihat bahwa komunikasi nirkabel dengan NRF24L01
berjalan dengan baik selama jarak masih terjaga yaitu dibawah 10 meter, data yang
dikirimkan ke raspberry dikonfersi ke unicode kemudian di decode dan data dapat dibaca.
4.3.4. Pengujian Sistem Keseluruhan
Pengujian ini dilakukan untuk memperoleh data-data yang akan dijadikan acuan nilai
variable yang digunakan sebagai tolak ukur sebuah sistem keamanan.
Berikut ini merupakan data yang ditampilkan dari hasil pembacaan
masing-masing sensor untuk sistem ini.
No Tanggal waktu Sensor PIR Sensor Getar
1 25-01-2017 20:09 3 8986
2 25-01-2017 20:08 3 1176
3 25-01-2017 20:08 1 4157
4 25-01-2017 20:08 1 21475
5 25-01-2017 20:07 1 0
6 25-01-2017 20:07 1 0
140 23-01-2017 0:07 1 9223
141 23-01-2017 0:07 1 401
142 23-01-2017 0:07 1 0
143 23-01-2017 0:07 1 0
144 23-01-2017 0:06 1 0
145 23-01-2017 0:06 1 0
146 23-01-2017 0:06 1 0
147 23-01-2017 0:06 1 0
148 23-01-2017 0:06 1 0
149 23-01-2017 0:06 1 0
Dari hasil pengujian diatas dengan 149 kali percobaan menggunakan sensor
getar , pir didapat data. Untuk rata rata nilai getar 788,02 dengan nilai maksimum
21.475 dan nilai untuk pir selalu bernilai 1.
Waktu yang dibutuhkan untuk membaca satu skema dari modul sensor ke
modul server adalah 1,062 ms. Dalam waktu 1062 ms terdapat 1 kali pembacaan nilai
sensor, jadi sensor memiliki kecepatan dalam waktu
1062 ��
BAB 5
KESIMPULAN DAN SARAN
5.1 Kesimpulan
Berdasarkan hasil analisa, perancangan dan implementasi yang telah dilakukan,
maka diperoleh beberapa kesimpulan sebagai berikut:
1. Modul sensor dapat mendeteksi gerakan dan getaran dengan sangat baik
kemudian mengirimkan informasinya kemodul Server.
2. Pada penelitian ini modul sensor sangat berpengaruh pada penempatan
peletakannya, sehingga perlu dilakukan kalibrasi baik dalam hal jarak ke
modul server juga konfigurasinya.
3. Notifikasi dikirim kepemilik rumah ketika melewati parameter sensitifitas.
4. Web admin sebagai antar muka pengaturan dan monitoring secara spesifik.
5.2 Saran
Berikut ini adalah saran yang dapat digunakan untuk tahap pengembangan
penelitian sistem ini antara lain:
1. Perlu dilakukan perbaikan pada minikomputer raspberry pi khusnya
kemampuan RAM agar ditingkatkan misalkan pada seri raspberry pi 3.
2. Pengembangan selanjutnya dapat dilakukan dengan menambahkan jarak