BAB II
TINJAUAN PUSTAKA
2.1 Sensor
Sensor adalah sesuatu yang digunakan untuk mendeteksi adanya perubahan lingkungan fisik atau kimia. Variable keluaran dari sensor yang diubah menjadi besaran listrik disebut transduser. Transduser sendiri berfungsi sebagai pengolah variasi gerak, panas, cahaya atau sinar, magnetis, dan kimia menjadi tegangan serta arus listrik. Sensor sendiri adalah komponen penting pada berbagai peralatan. Sensor juga berfungsi sebagai alat untuk mendeteksi dan juga untuk mengetahui magnitude. Transduser sendiri memiliki arti mengubah, resapan dari bahasa latin traducere bentuk perubahan yang dimaksud adalah kemampuan merubah energy kedalam bentuk energy lain. Energy yang diolah bertujuan untuk menunjang daripada kinerja piranti yang menggunakan sensor itu sendiri. Sensor sendiri sering digunakan dalam proses pendeteksi untuk proses pengukuran. Sensor yang sering digunakan dalam berbagai rangkaian alat elektromik antara lain :
Sensor cahaya atau sinar Sensor suhu, dan
Sensor tekanan.
Sensor yang digunakan pada system pengukuran debit air berbasis
gelombang ultrasonic bervariasi tergantung pada medium yang dilalui, mulai dari kerapatan rendah pada fasa gas, cair hingga padat. Secara matematis gelombang ultrasonic dapat dirumuskan sebagai berikut :
s = v.t/2………..(1)
Dimana s adalah jarak dalam satuan meter, v adalah kecepatan suara yaitu
344 m/detik dan t adalah waktu tempuh dalam satuan detik. Ketika gelombang ultrasonic menumbuk suatu penghalang maka sebagian gelombang tersebut akan dipantulkan sebagian diserap dan sebagian yang lain akan diteruskan.
Gelombang yang diserap akan dihitung oleh komparator dan diteruskan
menjadi bilangan binary. 2.1.1 Sensor Ultrasonic SRF04
Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang suara dan digunakan untuk mendeteksi keberadaan suatu objek tertentu di depannya, frekuensi kerjanya pada daerah diatas gelombang suara dari 40 KHz hingga 400 KHz.Prinsip kerja sensor
ultrasonik terdiri dari dari dua unit, yaitu unit pemancar dan unit penerima. Struktur unit pemancar dan penerima sangatlah sederhana, sebuah kristal piezoelectric dihubungkan dengan mekanik jangkar dan hanya
dihubungkan dengan diafragma penggetar.
Kontraksi yang terjadi diteruskan ke diafragma penggetar sehingga terjadi gelombang ultrasonik yang dipancarkan ke udara (tempat sekitarnya), dan pantulan gelombang ultrasonik akan terjadi bila ada objek tertentu, dan pantulan gelombang ultrasonik akan diterima kembali oleh oleh unit sensor penerima.
Selanjutnya unit sensor penerima akan menyebabkan diafragma penggetar akan bergetar dan efek piezoelectric menghasilkan sebuah tegangan bolak-balik dengan frekuensi yang sama. Besar amplitudo sinyal elekrik yang dihasilkan unit sensor penerima tergantung dari jauh dekatnya objek yang dideteksi serta kualitas dari sensor pemancar dan sensor penerima. Proses sensing yuang dilakukan pada sensor ini menggunakan metode pantulan
untuk menghitung jarak antara sensor dengan obyek sasaran. Jarak antara sensor tersebut dihitung dengan cara mengalikan setengah waktu yang digunakan oleh sinyal ultrasonik dalam perjalanannya dari rangkaian Tx sampai diterima oleh rangkaian Rx, dengan kecepatan rambat dari sinyal ultrasonik tersebut pada media rambat yang digunakannya, yaitu udara. Waktu di hitung ketika pemancar aktif dan sampai ada input dari
rangkaian penerima dan bila pada melebihi batas waktu tertentu rangkaian penerima tidak ada sinyal input maka dianggap tidak ada halangan
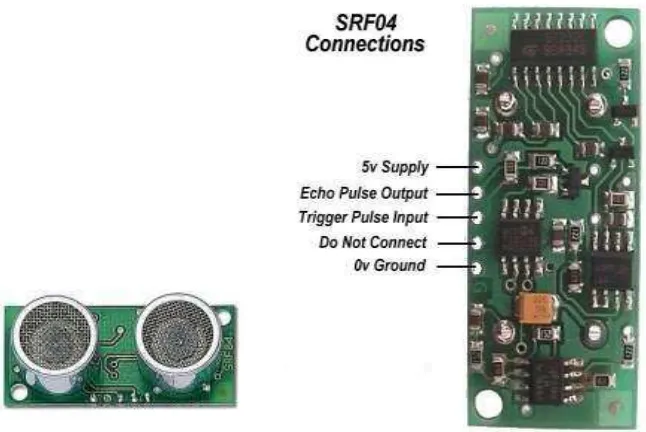
Gambar 2.1 Sensor ultrasonic HCSR04
2.1.2 Spesikasi sensor SRF04
Spesifikasi dari sensor SRF04 ini adalah sebagai berikut: - - Tegangan : 5 VDC –
- Konsumsi Arus : 30 mA (rata-rata), 50 mA (max) – - Frekuensi Suara : 40 kHz –
- Jangkauan : 3 cm - 3 m –
- Sensitivitas : Mampu mendeteksi gagang sapu berdiameter 3 cm dalam jarak > 2 m
- Input Trigger : 10 mS min. Pulsa Level TTL
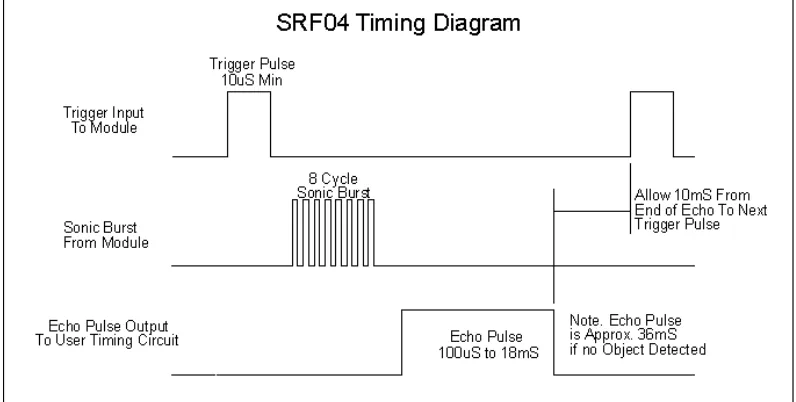
Gambar 2.2 Timing Diagram dari HCSR04
Sensor Devantech SRF-04 bekerja dengan cara memancarkan sinyal ultrasonik sesaat dan menghasilkan pulsa output yang sesuai dengan waktu pantul sinyal ultrasonik sesaat kembali menuju sensor. Dengan mengukur lebar pulsa pantulan tersebut jarak target didepan sensor dapat diketahui. Pin trigger dan echo dihubungkan ke mikrokontroler. Untuk memulai pengukuran jarak, mikro akan mengeluarkan output high pada pin trigger selama minimal 10uS, sinyal high yang masuk tadi akan membuat srf04 ini mengeluarkan suara ultrasonik. Kemudian ketika bunyi yang
dipantulkan kembali ke sensor srf04, bunyi tadi akan diterima dan membuat keluaran sinyal high pada pin echo yang kemudian menjadi inputan pada mikrokontroler.
dari low ke high dari pin echo maka akan mengaktifkan timer, dan ketika ada perubahan dari high ke low dari pin echo maka akan mematikan timer.
2.2 Mikrokontroler
Mikrokontroler sering disebut sebagai mikrokomputer atau embedded system. Mikrokontroler dipandang sebagai suatu sistem yang terdiri atas input,program dan output. Mikrokontroler dapat diatur oleh sebuah program. Proses untuk memasukkan program ke dalam mikrokotroler disebut dengan download dan alat yang digunakan disebut dengan downloader. Seperti sistem komputer nilai tambah sistem mikrokontroler dapat dilipatgandakan melalui program.
Mikrokontroler merupakan suatu IC yang di dalamnya berisi CPU, ROM, RAM, dan I/O. Dengan adanya CPU tersebut maka mikrokontroler dapat melakukan proses berfikir berdasarkan program yang telah diberikan kepadanya. Mikrokontroler banyak terdapat pada peralatan elektronik yang serba otomatis, mesin fax, dan peralatan elektronik lainnya.
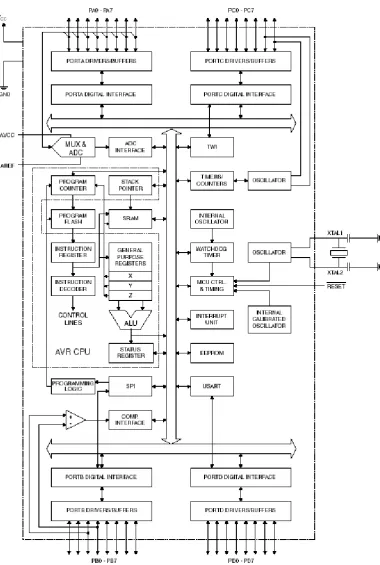
Mikrokontroler dapat disebut pula sebagai komputer yang berukuran kecil yang berdaya rendah sehingga sebuah baterai dapat memberikan daya. Mikrokontroler terdiri dari beberapa bagian seperti yang terlihat pada gambar di bawah ini :
Gambar 2.3 Bagian Mikrokontroler
register atau antara register dan memori. CPU merupakan bagian utama dalam suatu mikrokontroler. CPU pada mikrokontroler ada yang berukuran 8 bit ada pula yang berukuran 16 bit. CPU ini akan membaca program yang tersimpan di dalam ROM dan melaksanakannya.
b. ROM : digunakan untuk menyimpan data yang bersifat permanen. Dalam mikrokontroler program disimpan dalam ROM, atau EPROM atau Flash EPROM. Ada mikrokontroler yang dapat ditambah ROM eksternal di luar serpih mikrokontroler. Disamping ROM untuk program juga digunakan EEPROM untuk menyimpan data. ROM merupakan suatu memori (alat untuk mengingat) yang sifatnya hanya dibaca saja. Dengan demikian ROM tidak dapat ditulisi. Dalam dunia mikrokontroler ROM digunakan untuk menyimpan program bagi mikrokontroler tersebut. Program tersimpan dalm format biner (‘0’ atau ‘1’). Susunan bilangan biner tersebut bila telah terbaca
oleh mikrokontroler akan memiliki arti tersendiri.
d. Timer : Timer (pewaktu) adalah counter (pencacah) yang digunakan untuk membangkitkan pulsa atau deretan pulsa pada saat-saat tertentu atau dengan frekuensi tertentu. Pulsa ini digunakan untuk sebagai inetrupsi internal untuk memulai atau mengakhiri kegiatan tertentu. Dalam kebanyakan mikrokontroler, pencacah ini adalah pencacah naik, berbeda dengan pencacah turun yang diterapkan dalam sistem mikroprosesor.
e. PORT I/O : Terdiri atas Port Paralel dan Port Seri yang mempunyai kemampuan tristate. Pada sebagian mikrokontroler disediakan bandar masukan/keluaran analog. Fungsi bandar ini pada umumnya dipilih (dikonfigurasi) sebagai masukan/keluaran paralel/seri analog. Arah aliran data pada Port masukan/keluaran pada umumnya dipilih melalaui register arah (Data Direction Register, disingkat DDR). Port ini juga dipetakan sebagai memori. Untuk berkomunikasi dengan dunia luar, maka mikrokontroler menggunakan terminal I/O (port I/O), yang digunakan untuk masukan atau keluaran.
f. Interupsi : interupsi dapat dibedakan atas interupsi perangkat lunak yang dibangkitkan oleh interupsi yang ditanamkan dalam program dan interupsi perangkat keras yang dibangkitkan oleh sinyal perangkat keras yang baik yang berasal dari sumber internal seperti timer atau sumber eksternal dari port seri atau paralel.
2.2.1 Pengenalan Mikrokontroler AVR ATMega8
Mikrokontroler yaitu teknologi semikonduktor dengan kandungan
transistor yang lebih banyak namun hanya membutuhkan ruang yang kecil, dapat digunakan untuk membuat suatu aplikasi. Pada mikrokontroler, program
13olynom disimpan dalam ROM yang ukurannya 13olynomi lebih besar, sementara RAM digunakan sebagai tempat penyimpanan sementara, termasuk register-register yang digunakan pada mikrokontroler yang bersangkutan. Pada sistem 13olynomi perbandingan RAM dan ROM nya besar, artinya program pengguna disimpan dalam ruang RAM yang relative besar, sedangkan rutin-rutin antar muka perangkat keras disimpan dalam ROM yang sangat kecil. Sedangkan pada mikrokontroler perbandingan RAM dan ROM nya yang besar artinya program control disimpan dalam ROM yang ukurannya 13olynomi besar sedangkan RAM digunakan sebagai tempat penyimpanan sementara termasuk register-register yang digunakan pada mikrokontroler yang bersangkutan.
2.2.1.1 Arsitektur Mikrokontroler AVR ATMega 8
Mikrokontroler AVR memiliki arsitektur RISC 8 bit, dimana semua intruksi dikemas dalam kode 16-bit dan sebagian besar instruksi
dieksekusi dalam 1 (satu) siklus clock, berbeda dengan instruksi MCS51 yang membutuhkan 12 siklus clock. Selain itu AVR berteknologi RISC (Reduced Instruction Set Computing).
1. Saluran I/O sebanyak 32 buah ysng terdiri dari 4 port yakni (port A, port B, port C, port D)
2. ADC 10 bit (8 pin di port A.0 s/d port A.7)
3. 3 buah timer/counter dengan kemampuan pembandingan. 4. SRAM sebesar 512 byte.
5. Memori flash sebesar 8 kb dengan kemampuan Read While Write
6. EEPROM 512 byte yang dapat deprogram saat operasi.
7. Antarmuka komparator analog.
8. Port USART antar komunikasi serial dengan kecepatan maksimal 2,5 Mbps.
9. Unit interupsi internal dan eksternal. 10. 4 channel PWM
11. Watchdog Timer dengan osilator internal. 12. Port antarmuka SPI8535
13. 6 sleep modes (Idle, ADC Noise Reduction, Save, Power-Down, Standby and Extended Standby) untuk penghematan daya listrik.
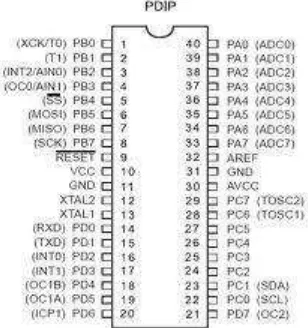
2.2.1.2 Konfigurasi Pin Mikrokontroler AVR ATMega 8
Berikut dijelaskan secara fungsional konfigurasi Pin mikrokontroler AVR ATMega8535 sebagai berikut :
1. VCC : merupakan pin yang berfungsi sebagai masukan pin catu daya. 2. GND : merupakan pin ground.
3. Port A (PA0..PA7 : merupakan pin I/O dua arah dan pin masukan ADC. 4. Port B (PB0..PB7) : merupakan pin I/O dua arah dan pin fungsi khusus, yaitu timer/counter, komparator analog dan SPI.
5. Port C (PC0..PC7) : merupakan pin I/O dua arah dan pin fungsi khusus, yaitu TWI, komparator analog, input ADC dan Timer Oscilator.
6. Port D (PD0..PD7) : merupakan pin I/O dua arah dan pin fungsi khusus yaitu komparator analog, interupsi eksternal dan komunikasi serial.
7. RESET : merupakan pin yang digunakan untuk mereset mikrokontroler. 8. XTAL1 dan XTAL2 : merupakan pin masukan clock eksternal.
9. AVCC : merupakan pin masukan tegangan untuk ADC. 10. AREF : merupakan pin masukan tegangan referensi ADC.
2.2.2 Deskripsi Pin-Pin pada Mikrokontroler ATMega8 2.2.2.1 Port A
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer Port A dapat
17olyno arus 20 mA dan dapat mengendalikan display LED secara
langsung. Data Direction Register port A (DDRA) harus disetting terlebih dahulu sebelum Port A digunakan. Bit-bit DDRA diisi 0 jika ingin
memfungsikan pin-pin port A yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, kedelapan pin port A juga digunakan untuk masukan sinyal analog bagi A/D converter.
2.2.2.2 Port B
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port B dapat
17olyno arus 20 mA dan dapat mengendalikan display LED secara
langsung. Data Direction Register port B (DDRB) harus disetting terlebih dahulu sebelum port B digunakan. Bit-bit DDRB diisi 0 jika ingin
Port Pin Fungsi Khusus
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port C dapat memberi arus 20
mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port C (DDRC) harus disetting terlebih dahulu sebelum port C
C (PC6 dan PC7) juga memiliki fungsi 18olynomial18 sebagai oscillator untuk timer/counter 2.
2.2.2.4 Port D
Merupakan 8-bit directional port I/O. Setiap pinnya dapat menyediakan internal pull-up resistor (dapat diatur per bit). Output buffer port D dapat memberi arus 20
mA dan dapat mengendalikan display LED secara langsung. Data Direction Register port D (DDRD) harus disetting terlebih dahulu sebelum port D
digunakan. Bit-bit DDRD diisi 0 jika ingin memfungsikan pin-pin port D yang bersesuaian sebagai input, atau diisi 1 jika sebagai output. Selain itu, pin-pin port D juga memiliki untuk fungsi-fungsi alternatif khusus seperti berikut.
Port Pin Fungsi Khusus
PD0 RDX (UART input line)
PD1 TDX (UART output line)
PD2 INT0 ( external interrupt 0 input )
PD3 INT1 ( external interrupt 1 input )
PD4 OC1B (Timer/Counter1 output
compare B match output)
PD5 OC1A (Timer/Counter1 output
compareA match output)
PD6 ICP (Timer/Counter1 input
capture pin)
PD7 OC2 (Timer/Counter2 output
2.2.2.5. RESET (Reset input)
RESET (RST) pada pin 9 merupakan reset dari AVR. Jika pada pin ini diberi
masukan low selama minimal 2 machine cycle maka sistem ini akan di-reset. 2.2.2.6. XTAL1 (Input Oscillator)
XTAL 1 adalah masukan ke inverting oscillator amplifier dan input ke internal clock operating circuit.
2.2.2.7. XTAL2 (Output Oscillator)
XTAL 2 adalah output dari inverting oscillator amplifier. 2.2.2.8.AVCC
AVCC adalah pin penyedia tegangan untuk port A dan A/D converter. Pin ini harus secara eksternal terhubung ke Vcc melalui low pass filter.
2.2.2.9.AREF
AREF adalah pin referensi analog untuk A/D converter. 2.2.2.10.AGND
AGND adalah kaki untuk analog ground
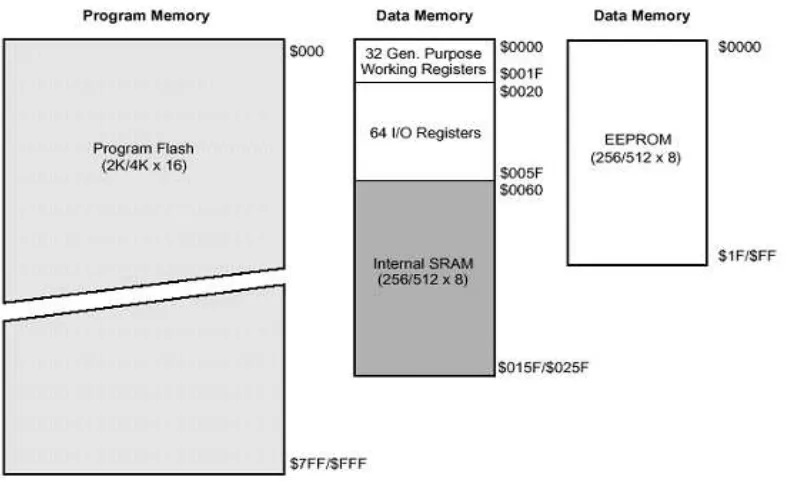
2.2.3 Peta Memori ATMega8
fungsi terhadap berbagai peripheral mikrokontroler, seperti kontrol register, timer/counter, fungsi fungsi I/O, dan sebagainya. Register khusus alamat memori
secara lengkap dapat dilihat pada tabel dibawah . Alamat memori berikutnya digunakan untuk SRAM 512 byte, yaitu pada lokasi $60 sampai dengan $25F. 20
Gambar 2.6 Memori ATMega8
Selain itu AVR Atmega8535 juga memilki memori data berupa EEPROM 8-bit sebanyak 512 byte. Alamat EEPROM dimulai dari $000 sampai $1FF.
2.2.4 Status Register
Status register adalah register berisi status yang dihasilkan pada setiap operasi yang dilakukan ketika suatu instruksi dieksekusi. SREG merupakan bagian dari inti CPU mikrokontroler.
Global Interrupt Enable), Bit harus di Set untuk meng-enable semua
jenis interupsi.
Bit Copy Storage), Instruksi BLD dan BST menggunakan bit T
sebagai sumber atau tujuan dalam operasi bit. Suatu bit dalam sebuah register GPR dapat disalin ke bit T menggunakan instruksi BST, dan sebaliknya bit T dapat disalin kembali kesuatu bit dalam register GPR dengan menggunakan instruksi BLD.
Half Cary Flag)
Sign Bit) merupakan hasil operasi EOR antara flag –N (negative) dan flag V (complement overflow).
5. Two’s Component Overflow Flag) Bit ini berfungsi untuk mendukung operasi matematis.
Negative Flag) Flag N akan menjadi Set, jika suatu operasi
matematis menghasilkan bilangan negatif.
Zero Flag) Bit ini akan menjadi set apabila hasil operasi matematis
menghasilkan bilangan 0.
Cary Flag) Bit ini akan menjadi set apabila suatu operasi
menghasilkan carry.
2.3 Bahasa Pemograman C
Bahasa C dikembangkan pada Lab Bell pada tahun 1978, oleh Dennis Ritchi dan
( American National Standards Institute ), yang digunakan sebagai referensi dari berbagai versi C yang beredar dewasa ini termasuk Turbo C.
Dalam beberapa literature, bahasa C digolongkan bahasa level menenganh karena bahasa C mengkombinasikan elemen bahasa tinggi dan elemen bahasa rendah. Kemudahan dalam level rendah merupakan tujuan diwujudkanya bahasa C. pada tahun 1985 lahirlah pengembangan ANSI C yang dikenal dengan C++ (diciptakan oleh Bjarne Struostrup dari AT % TLab). Bahasa C++ adalah pengembangan dari bahasa C. Bahasa C++ mendukung konsep pemrograman berorientasu objek dan pemrograman berbasis windows.
Sampai sekarang bahasa C++ terus berkembang dan hasil perkembangannya muncul bahasa baru pada tahun 1995 (merupakan keluarga C dan C++ yang dinamakan java). Istilah prosedur dan fungsi dianggap sama dan disebut dengan fungsi saja. Hal ini karena di C++ sebuah prosedur pada dasarnya adalah sebuah fungsi yang tidak memiliki tipe data kembalian (void). Hingga kini bahasa ini masih popular dan penggunaannya tersebar di berbagai platform dari windows samapi linux dan dari PC hingga main frame.
Ada pun kekurangan dan Kelebihan Bahasa C sebagai berikut : 1. Kelebihan Bahasa C:
· Bahasa C tersedia hampir di semua jenis computer.
· Kode bahasa C sifatnya adalah portable dan fleksibel untuk semua jenis computer.
· Bahasa C hanya menyediakan sedikit kata-kata kunci. hanya terdapat 32 kata kunci.
· Dukungan pustaka yang banyak. · C adalah bahasa yang terstruktur
· Bahasa C termasuk bahasa tingkat menengah
Penempatan ini hanya menegaskan bahwa bahasa C bukan bahasa pemrograman yang berorientasi pada mesin yang merupakan ciri bahasa tingkat rendah. Melainkan berorientasi pada obyek tetapi dapat dinterprestasikan oleh mesin dengan cepat. Secepat bahasa mesin inilah salah satu kelebihan bahasa C yaitu memiliki kemudahan dalam menyusun programnya semudah bahasa tingkat tinggi namun dalam mengesekusi program secepat bahasa tingkat rendah.
2. Kekurangan Bahasa C:
· Banyaknya operator serta fleksibilitas penulisan program kadang-kadang membingungkan pemakai.
· Bagi pemula pada umumnya akan kesulitan menggunakan pointer.
3. Struktur Bahasa C
a. Program bahasa C tersusun atas sejumlah blok fungsi.
b. Setiap fungsi terdiri dari satu atau beberapa pernyataan untuk melakukan suatu proses tertentu.
c. Tidak ada perbedaan antara prosedur dan fungsi.
d. Sstiap program bahasa C mempunyai suatu fungsi dengan nama “main” (Program Utama).
2.4 LCD (Liquid Crystal Display)
LCD (Liquid Crystal Display) adalah suatu jenis media tampil yang menggunakan kristal cair sebagai penampil utama. LCD sudah digunakan diberbagai bidang misalnya alal–alat elektronik seperti televisi, kalkulator, ataupun layar komputer. Pada bab ini aplikasi LCD yang dugunakan ialah LCD dot matrik dengan jumlah karakter 2 x 16. LCD sangat berfungsi sebagai penampil yang nantinya akan digunakan untuk menampilkan status kerja alat. Adapun fitur yang disajikan dalam LCD ini adalah :
1. Terdiri dari 16 karakter dan 2 baris. 2. Mempunyai 192 karakter tersimpan. 3. Terdapat karakter generator terprogram 4. Dapat dialamati dengan mode 4-bit dan 8-bit 5. Dilengkapi dengan back light.
6. Tersedia VR untuk mengatur kontras.
7. Pilihan konfigurasi untuk operasi write only atau read/write.
8. Catu daya +5 Volt DC dan Kompatibel dengan DT-51 dan DT-AVR Low Cost Series serta sistem mikrokontroler/mikroprosesor lain.
Gambar 2.8 LCD (Liquid Crystal Display)
1. Pin 1 dihubungkan ke Gnd 2. Pin 2 dihubungkan ke Vcc +5V
3. Pin 3 dihubungkan ke bagian tegangan potensiometer 10 kΩ sebagai pengatur kontras.
4. Pin 4 untuk membritahukan LCD bahwa sinyal yang dikirim adalah data, jika Pin 4 ini diset ke logika 1 (high, +5V), atau memberitahukan bahwa sinyal yang dikirim adalah perintah jika pin ini di set ke logika 0 (low, 0V).
5. Pin 5 digunakan untuk mengatur fungsi LCD. Jika di set ke logika 1 (high, +5V) maka LCD berfungsi untuk menerima data (membaca data). Dan fungsi untuk mengeluarkan data, jika pin ini di set ke logika 0 (low, 0V). Namun kebanyakan aplikasi hanya digunakan untuk menerima data, sehingga pin 5 ini selalu dihubungkan ke Gnd.
6. Pin 6 adalah terminal enable. Berlogika 1 setiap kali pengiriman atau pembaca data.
7. Pin 7 – Pin 14 adalah data 8 bit data bus (Aplikasi ini menggunakan 4 bit MSB saja, sehingga pin data yang digunkan hanya Pin 11 – Pin 14).
8. Pin 15 dan Pin 16 adalah tegangan untuk menyalakan lampu LCD.
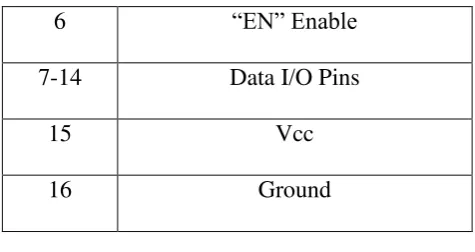
Pin Deskripsi
1 Ground
2 Vcc
3 Pengatur kontras
6 “EN” Enable
7-14 Data I/O Pins
15 Vcc
16 Ground
Tabel 2.1 Deskripsi Pin Pada LCD
Cara kerja LCD (Liquid Crystal Display) pada aplikasi umumnya RW diberi logika rendah “0”. Bus data terdiri dari 4-bit atau 8-bit. Jika jalur data 4-bit
maka yang digunakan ialah DB4 sampai dengan DB7. Sebagaimana terlihat pada table diskripsi, interface LCD merupakan sebuah parallel bus, dimana hal ini sangat memudahkan dan sangat cepat dalam pembacaan dan penulisan data dari atau ke LCD. Kode ASCII yang ditampilkan sepanjang 8-bit dikirim ke LCD secara 4-bit atau 8 bit pada satu waktu.
2.5 Resistor
Resistor adalah komponen dasar elektronika yang digunakan untuk membatasi jumlah arus yang menaglir dalam suatu rangkaian.
Gambar 2.9 Gambar dan Lambang Resistor
Resistor umumnya berbentuk tabung dengan dua kaki tembaga dikiri dan kanan. Dibadannya terdapat lingkaran berbentuk gelang kode warna yang memudahkan pemakai mengenali besar resistansi tanpa mengukur besarannya tanpa menggunakan Ohm meter.
2.6 Relay
Gambar 2.10 Relay
Pada dasarnya, Relay terdiri dari 4 komponen dasar yaitu : a. Electromagnet (Coil)
b. Armature
c. Switch Contact Point (Saklar) d. Spring
Berikut ini merupakan gambar dari bagian-bagian Relay :
2.7 Pengukuran Debit Air
Cara mengukur debit untuk saluran berbentuk penampang bebas (saluran alam) apalagi yang cukup besar seperti anak sungai untuk sumber irigasi. Metode yang paling umum adalah dengan menggunakan prinsip matematika dan kalkulus, yaitu benda dibagi menjadi beberapa persegi panjang,
Gambar 2.12 Penampang Sungai
Luas penampang basah adalah jumlah luas dari lima kotak, dengan kedalamannya seperti yang dapat diukur di titik A, B, C, D, dan E. Lebarnya tiap kotak adalah seperlima dari lebar saluran/sungai.
Besaran debit air dapat dihitung dengan: Debit Q = V x A ...(2) Q = debit
V = kecepatan aliran air (m/det) A = luas penampang basah (m2)
Luas penampang basah sangat tergantung pada bentuk penampang dimana air mengalir, misalnya sebuah penampang irigasi yang biasanya berbentuk trapesium, maka luas penampang basah dapat diperoleh dengan:
LD = Lebar Dasar penampang (m) LPA = Lebar Permukaan Air (m) h = tinggi permukaan air (m)
2.8 Motor Pompa
Pompa adalah mesin atau peralatan mekanis yang digunakan untuk menaikkan cairan dari dataran rendah ke dataran tinggi atau untuk mengalirkan cairan dari daerah bertekanan rendah kedaerah yang bertekanan tinggi dan juga sebagai penguat laju aliran pada suatu sistem jaringan perpipaan. Hal ini dicapai dengan membuat suatu tekanan yang rendah pada sisi masuk atau suction dan tekanan yang tinggi pada sisi keluar atau discharge dari pompa. Pada prinsipnya, pompa mengubah energi mekanik motor menjadi energi aliran fluida. Energi yang diterima oleh fluida akan digunakan untuk menaikkan tekanan dan mengatasi tahanan – tahanan yang terdapat pada saluran yang dilalui.
Pompa juga dapat digunakan pada proses - proses yang membutuhkan tekanan hidraulik yang besar. Hal ini bisa dijumpai antara lain pada peralatan - peralatan
berat. Dalam operasi, mesin - mesin peralatan berat membutuhkan tekanan discharge yang besar dan tekanan isap yang rendah. Akibat tekanan yang rendah
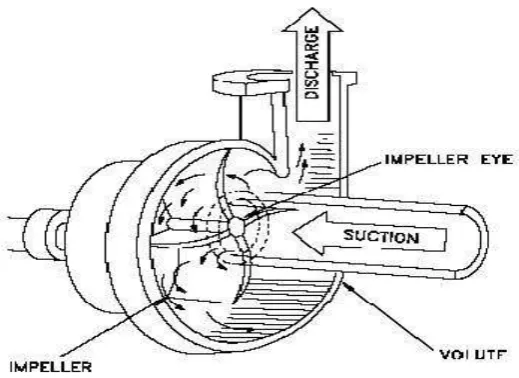
2.8.1 Pengertian Pompa Sentrifugal
Pompa sentrifugal memiliki sebuah impeller (baling – baling) yang bertujuan untuk mengalirkan zat cair dari suatu tenpat ketempat lain dengan cara mengubah energi zat cair yang dikandung menjadi lebih besar. Pompa digerakkan oleh motor. Daya dari motor diberikan pada poros pompa untuk memutar impeler yang dipasangkan pada poros tersebut. Karena pompa digerakkan oleh motor listrik (motor penggerak), jadi daya guna kerja pompa adalah perbandingan antara gaya mekanis yang diberikan motor kepada pompa.
Zat cair yang keluar dari impeler dengan kecepatan tinggi kemudian melalui saluran yang penampangnya semakin membesar yang disebut volute, sehingga akan terjadi perubahan dari head kecepatan menjadi head tekanan. Jadi zat cair yang keluar dari flens keluar pompa head totalnya bertambah besar. Sedangkan proses pengisapan terjadi karena setelah zat cair dilemparkan oleh impeller, ruang diantara sudut - sudut menjadi vakum, sehingga zat cair akan terisap masuk. Selisih energi persatuan berat atau head total dari zat cair pada flens keluar dan flens masuk disebut sebagai head total pompa. Sehingga dapat dikatakan bahwa
Gambar 2.13 Pompa sentrifugal
Pompa sentrifugal dapat diklasifikasikan berdasarkan beberapa kriteria, antara lain:
1. Bentuk arah aliran yang terjadi di impeller. Arah aliran fluida dalam impeller dapat berupa axial flow (aliran axial), mixed flow (campuran aliran), atau radial flow (aliran radial).
2. Bentuk kontruksi dari impeller: impeller yang digunakan dalam pompa
sentrifugal dapat berupa open impeller, semi – open impeller, atau close impeller. 3. Banyaknya jumlah suction inlet. Beberapa pompa sentrifugal memiliki suction inlet lebih dari dua buah. Pompa yang memiliki satu suction inlet disebut single –
suction pump sedangkan untuk pompa yang memiliki dua suction inlet disebut
double – suction pump.