M O D U L E L E K T R O N I K A D A N M E K A T R O N I K A
MOD
AL PENGOPERASI
MODUL PENGOPERASIAN PLC
Untuk Sekolah Menengah Kejuruan
MOD
AL PENGOPERASI
MODUL PENGOPERASIAN PLC
Copyright © 2017, Direktorat Pembinaan SMK
All rights Reserved
Pengarah
Drs. H. Mustaghirin Amin, M.BA
Direktur Pembinaan SMK
Penanggung Jawab
Arie Wibowo Khurniawan, S.Si. M.Ak
Kasubdit Program dan Evaluasi, Direktorat Pembinaan SMK
Ketua Tim
Arfah Laidiah Razik, S.H., M.A.
Kasi Evaluasi, Subdit Program dan Evaluasi, Direktorat Pembinaan SMK
Penyusun
Lingga Nurrahman, S.Pd (SMK Negeri 1 Cilegon)
Desain dan Tata Letak Rayi Citha Dwisendy, S.Ds
ISBN
Penerbit:
Direktorat Pembinaan Sekolah Menengah Kejuruan
MOD
AL PENGOPERASI
KATA PENGANTAR KASUBDIT PROGRAM DAN EVALUASI
Assalamu’alaikum Warahmatullahi Wabarakatuh Salam Sejahtera,
Melalui Instruksi Presiden (Inpres) Nomor 9 Tahun 2016 tentang Revitalisasi Sekolah Menengah Kejuruan (SMK), dunia pendidikan khususnya SMK sangat terbantu karena akan terciptanya sinergi antar instansi dan lembaga terkait sesuai dengan tugas dan fungsi masing-masing dalam usaha mengangkat kualitas SMK. Kehadiran Buku Serial Revitalisasi SMK ini diharapkan dapat memudahkan penyebaran informasi bagaimana tentang Revitalisasi SMK yang baik dan benar kepada seluruh stakeholder sehingga bisa menghasilkan lulusan yang terampil, kreatif, inovatif, tangguh, dan sigap menghadapi tuntutan dunia global yang semakin pesat.
Buku Serial Revitalisasi SMK ini juga diharapkan dapat memberikan pelajaran yang berharga bagi para penyelenggara pendidikan Kejuruan, khususnya di Sekolah Menengah Kejuruan untuk mengembangkan pendidikan kejuruan yang semakin relevan dengan kebutuhan masyarakat yang senantiasa berubah dan berkembang sesuai tuntuan dunia usaha dan industri.
Tidak dapat dipungkuri bahwa pendidikan kejuruan memiliki peran strategis dalam menghasilkan manusia Indonesia yang terampil dan berkeahlian dalam bidang-bidang yang sesuai dengan kebutuhan. Terima kasih dan penghargaan kami sampaikan kepada semua pihak yang terus memberikan kontribusi dan dedikasinya untuk meningkatkan kualitas Sekolah Menengah Kejuruan. Buku ini diharapkan dapat menjadi media informasi terkait upaya peningkatan kualitas lulusan dan mutu Sumber Daya Manusia (SDM) di SMK yang harus dilakukan secara sistematis dan terukur.
Wassalamu`alaikum Warahmatullahi Wabarakatuh
MOD
AL PENGOPERASI
/%8%4)2+%28%6
Puji syukur kami panjatkan kehadirat Tuhan Yang Maha Esa atas rahmat dan karunia-Nya, sehingga kami dapat menyusun bahan ajar modul manual untuk Bidang Ketenagalistrikan. Modul ini disusun menggunakan pendekatan pembelajaran berdasarkan kompetensi, sebagai konsekuensi logis dari Kurikulum SMK Tahun 2016 yang menggunakan pendekatan kompetensi.
Pekerjaan berat ini dapat terselesaikan, tentu dengan banyaknya dukungan dan bantuan dari berbagai pihak yang perlu diberikan penghargaan dan ucapan terima kasih. Kami mengharapkan saran dan kritik dari para pakar di bidang psikologi, praktisi dunia usaha dan industri, dan pakar akademik sebagai bahan untuk melakukan peningkatan kualitas modul. Diharapkan para pemakai berpegang pada azas keterlaksanaan, kesesuaian, dan fleksibilitas dengan mengacu pada perkembangan IPTEK pada dunia kerja dan potensi SMK serta dukungan kerja dalam rangka membekali kompetensi standar para peserta diklat.
Demikian, semoga modul ini dapat bermanfaat bagi kita semua, khususnya peserta diklat SMK Bidang Ketenagalistrikan, atau praktisi yang sedang mengembangkan bahan ajar modul SMK.
Stuttgart, 09 April 2017
Lingga Nurrahman, S.Pd
MOD
AL PENGOPERASI
(%*8%6-7-Daftar Isi ………..iii
BAB I PENDAHULUAN ………1
A. Deskripsi……….. 1
B. Prasyarat………. 1
C. Petunjuk Penggunaan Modul………. 1
D. Tujuan Akhir………. 2
E. Kompetensi ………..2
F. Cek Kemampuan ……….3
BAB II PEMBELAJARAN……….. 6
Rencana Belajar Siswa……… 6
Kegiatan Belajar 1 : Sistem Kendali PLC……….7
A. Sistem Kendali ……….7
B. Sistem Kendali PLC………10
C. Komponen Unit PLC ……….…14
D. Spesifikasi ……….…20
E. Perbandingan Sistem Kendali Elektromagnet da PLC ……….….23
F. Keunggulan Sistem Kendali PLC ………...23
G. Penerapan Sistem Kendali PLC ………...24
H. Langkah-Langkah Desain Sistem Kendali PLC………. 25
Rangkuman 1 ……….25
Tes Formatif 1 ………..26
Kunci Jawaban Tes Formatif 1………... 27
Kegiatan Belajar 2 : Teknik Pemrograman PLC………....29
A. Unsur-Unsur Program ………..29
B. Bahasa Pemrograman ………...30
DAFTAR ISI
MOD
AL PENGOPERASI
C. Struktur Daerah Memori ………33
D. Instruksi Pemrograman ……….33
E. Peringatan Dalam Pemrograman ……….48
F. Eksekusi Program ………...49
G. Langkah-Langkah Pembuatan Program……….. .50
H. Program Kendali Motor ………..51
Tugas ………..57
Rangkuman 2 ………..58
Tes Formatif 2 ………...59
Jawaban Tes Formatif 2……… ..60
Kegiatan Belajar 3 : Memasukkan Program ke Dalam PLC……… ..62
A. Mode Operasi PLC ………..62
B. Jenis-Jenis Alat Pemrogram ………63
C. Sambungan Alat Pemrogram……….. ..63
D. Memasukkan Program Menggunakan CX-Programmer ………..65
E. Memasukkan Program Menggunakan Konsol Pemrogram ………..77
Rangkuman 3………. 83
Tes Formatif 3 ………..84
Jawaban Tes Formatif 3 ……….86
Lembar Kerja 3.1 ……….87
Lembar Kerja 3.2 ……….90
Lembar Kerja 3.3 ……….92
Kegiatan Belajar 4 : Pemasangan dan Pengawatan I/O ………..93
A. Keselamatan Kerja Pemasangan Unit PLC ………...95
B. Keselamatan Kerja Pengawatan I/O ………....95
C. Pengawatan I/O Program Kendali Motor………..99
D. Pengawatan Beban Sistem Kendali Motor ………..101
MOD
AL PENGOPERASI
Rangkuman 4 ………..……….105
Tes Formatif 4 ………..106
Jawaban Tes Formatif 4 ……….107
Lembar Kerja 4 ……….108
Kegiatan Belajar 5 : Mengoperasikan Sistem Kendali ………..110
A. Menguji coba Program Kendali PLC ………...110
B. Mengoperasikan Motor Dengan Kendali PLC ……….114
Rangkuman 5 ……….115
Tes Formatif 5...116
Jawaban Tes Formatif 5 ……….116
Lembar Kerja 5 ……….118
Kegiatan Belajar 6 : Melacak Kesalahan Sistem Kendali PLC ………..123
A. Macam-Macam Kesalahan Sistem Kendali PLC ……….123
B. Kesalahan Pemrograman ………..123
C. Kesalahan Komunikasi ……….128
D. Kesalahan Operasi ………...128
E. Pemeliharaan Preventif ………..…...130
F. Bagan Alir Lacak Kesalahan ………..132
Rangkuman 6 ………..135
Tes Formatif 6 ……….135
Jawaban Tes Formatif 6……….. 136
Lembar Kerja 6.1………137
Lembar Kerja 6.2 ……….138
BAB III Evaluasi ………139
Daftar Pustaka………. 142
MOD
AL PENGOPERASI
&%&-4)2(%,909%2
% (IWOVMTWM
& 4VEW]EVEX
MOD
AL PENGOPERASI
&%&-4)2(%,909%2
% (IWOVMTWM
Modul Pengoperasian PLC ini diproyeksikan bagi siswa Sekolah Menengah Kejuruan (SMK) pada bidang keahlian ketenagalistrikan. Mengingat bahwa fungsi PLC sebagai alat kendali sangat luas, sementara jumlah jam pembelajaran yang dialokasikan terbatas, maka materi modul mencakup hanya kemampuan dasar yang harus dimiliki siswa untuk memenuhi kompetensi yang dimaksud.
Selain itu, meskipun secara prinsip penggunaan PLC sebagai alat kendali adalah sama apapun merknya, namun kenyataannya terdapat perbedaan dalam beberapa hal, misalnya dalam teknik pengalamatan. Oleh karena itu, demi kesinambungan paparan pemelajaran, maka dalam modul ini PLC yang dijelaskan hanya satu merk saja.
& 4VEW]EVEX
Agar mudah memahami modul ini diharapkan siswa telah menguasai kompetensi sebagai berikut :
Gerbang logika dasar
Sistem kendali elektromagnet
Karakteristik operasi mesin listrik
Pengoperasian komputer dengan sistem operasi Window. ' 4IXYRNYO4IRKKYREER1SHYP
Modul ini disusun sedemikian sehingga siswa dapat menguasai kompetensi secara mandiri. Oleh karena itu, modul ini dilengkapi dengan tes formatif dengan maksud agar siswa dapat mengukur kemampuannya sendiri. Kunci jawaban disediakan untuk dibaca setelah siswa mengerjakan soal tes formatif. Jika terdapat kesalahan jawaban, maka modul harus dipelajari ulang khusus pada bagian materi yang belum dikuasai.
BAB I
MOD
AL PENGOPERASI /SQTIXIRWM -RHMOEXSV4IRGETEMER/SQTIXIRWM
* 'IO/IQEQTYER
Fungsi guru pembimbing, dalam hal ini sebagai fasilitator yang menyediakan
peralatan untuk sarana praktek dan memberikan penjelasan materi yang sulit dipahami siswa. Pemberian tugas-tugas tambahan sangat perlu untuk mengembangkan kemampuan siswa.
( 8YNYER%OLMV
Setelah mempelajari modul ini, diharapkan siswa dapat menguasai kompetensi mengoperasikan mesin produksi dengan kendali PLC. Kompetensi yang dimaksud mencakup pengetahuan, keterampilan dan sikap kerja yang benar berkaitan dengan penggunaan PLC sebagai alat kendali. Aspek-aspek keselamatan kerja lebih diutamakan mengingat bahwa PLC merupakan peralatan yang riskan terhadap kesalahan penggunaan.
) /SQTIXIRWM
Mata Pelajaran : Sistem Kontrol Terprogram
Kelas : XI
Jumlah Jam : 288 JP (8 JP x 36 minggu efektif)
/SQTIXIRWM -RHMOEXSV4IRGETEMER/SQTIXIRWM
1. Menganalisis dan memeriksa kondisi operasi sistem dan perangkat keras PLC berdasarkan operation manual
Menentukan dan menganalisis kondisi operasi sistem dan perangkat keras PLC berdasarkan operation manual
Mengkonstruksi dan memeriksa kondisi operasi sistem dan komponen perangkat keras PLC
2. Menganalisis dan
memeriksa hubungan
MOD
AL PENGOPERASI
/SQTIXIRWM -RHMOEXSV4IRGETEMER/SQTIXIRWM
digital I/O PLC dengan komponen eksternal
Mengkonstruksi dan memeriksa hubungan digital I/O PLC dengan komponen eksternal
3. Menerapkan konfigurasi, set-up PLC dan mengatur PLC sesuai dengan buku manual dan fungsinya
Menerangkan dan menerapkan konfigurasi dan set-up PLC
Mengaktifkan dan mengatur PLC sesuai dengan buku manual dan fungsinya
4. Menentukan peta memori PLC dan pengalamatan I/O serta Menggunakan peta
memori* dan
pengalamatan I/O pada pemrograman PLC
Menerangkan dan menentukan peta memori PLC dan pengalamatan I/O
Menunjukkan dan menggunakan peta memori dan pengalamatan I/O pada pemrograman PLC
5. Menentukan bahasa
pemrograman PLC berdasarkan programming manual dan merancang pengontrolan dengan bahasa pemrograman PLC
Menerangkan dan menentukan bahasa pemrograman PLC berdasarkan programming manual
Mengkonstruksi dan merancang pengontrolan dengan bahasa pemrograman PLC
* 'IO/IQEQTYER
Tabel berikut menginventarisir kemampuan-kemampuan yang menunjukkan Anda telah menguasai kompetensi mengoperasikan mesin produksi dengan kendali PLC. Berilah tanda pada kolom 3 atau 4 sesuai kemampuan Anda.
MOD
AL PENGOPERASI
Kompetensi Kemampuan
Penguasaan Ya Tidak 1. Menganalisis dan
memeriksa kondisi operasi sistem dan perangkat keras PLC berdasarkan operation manual
a. Menentukan kondisi operasi sistem dan perangkat keras PLC berdasarkan operation manual
b. Menganalisis kondisi operasi sistem dan perangkat keras PLC berdasarkan operation manual
c. Mengkonstruksi kondisi operasi sistem dan perangkat keras PLC berdasarkan operation manual
d. Memeriksa kondisi operasi sistem dan perangkat keras PLC berdasarkan operation manual
2. Menganalisis dan memeriksa
hubungan digital I/O
PLC dengan komponen eksternal
a. Menyelidiki hubungan digital I/O PLC dengan komponen eksternal.
b. Menganalisis hubungan digital I/O PLC dengan komponen eksternal.
c. Mengkonstruksi hubungan digital I/O PLC dengan komponen eksternal
d. Memeriksa hubungan digital I/O PLC dengan komponen eksternal
3. Menerapkan konfigurasi, set-up PLC dan mengatur PLC sesuai dengan buku manual dan fungsinya
a. Menerangkan konfigurasi dan set-up PLC b. Menerapkan konfigurasi dan set-up PLC
c. Mengaktifkan mengatur PLC sesuai dengan buku manual dan fungsinya
MOD
AL PENGOPERASI
4. Menentukan peta memori PLC dan pengalamatan I/O serta Menggunakan peta memori dan pengalamatan I/O pada pemrograman PLC
a. Menerangkan peta memori PLC dan pengalamatan I/O
b. Menentukan peta memori PLC dan pengalamatan I/O
c. Menunjukkan peta memori dan pengalamatan I/O pada pemrograman PLC
d. Menggunakan peta memori dan pengalamatan I/O pada pemrograman PLC
5. Menentukan bahasa pemrograman PLC berdasarkan programming manual dan merancang pengontrolan dengan bahasa pemrograman PLC
a. Menerangkan bahasa pemrograman PLC berdasarkan programming manual
b. Menentukan bahasa pemrograman PLC berdasarkan programming manual
c. Mengkonstruksi pengontrolan dengan bahasa pemrograman PLC
MOD
AL PENGOPERASI
/IKMEXER&IPENEV 7-78)1/)2(%0-40'
% 7MWXIQ/IRHEPM
&%&--4)1&)0%.%6%2
6IRGERE&IPENEV7MW[E
Mata Pelajaran : Sistem Kontrol Terprogram
Kompetensi : 1. Menganalisis dan memeriksa kondisi operasi sistem dan perangkat keras PLC berdasarkan operation manual
2. Menganalisis dan memeriksa hubungan digital I/O PLC dengan komponen eksternal
3. Menerapkan konfigurasi, set-up PLC dan mengatur PLC sesuai dengan buku manual dan fungsinya 4. Menentukan peta memori PLC dan pengalamatan I/O
serta Menggunakan peta memori dan pengalamatan I/O pada pemrograman PLC
5. Menentukan bahasa pemrograman PLC berdasarkan
programming manual dan merancang pengontrolan dengan bahasa pemrograman PLC
.IRMW/IKMEXER 8ERKKEP ;EOXY 4EVEJ+YVY
Kegiatan belajar 1 Kegiatan belajar 2 Kegiatan belajar 3 Kegiatan belajar 4 Kegiatan belajar 5 Kegiatan belajar 6
BAB II
MOD
AL PENGOPERASI
/IKMEXER&IPENEV 7-78)1/)2(%0-40'
Tujuan Pemelajaran
Setelah pemelajaran siswa dapat :
Mengidentifikasi peralatan sistem kendali PLC
Menjelaskan cara kerja sistem kendali PLC
Menjelaskan keunggulan PLC
Menyebutkan daerah penerapan PLC
Mengidentifikasi struktur PLC
% 7MWXIQ/IRHEPM
Istilah sistem kendali dalam teknik listrik mempunyai arti suatu peralatan atau sekelompok peralatan yang digunakan untuk mengatur fungsi kerja suatu mesin dan memetakan tingkah laku mesin tersebut sesuai dengan yang dikehendaki. Fungsi kerja mesin tersebut mencakup antara lain menjalankan (start), mengatur (regulasi), dan menghentikan suatu proses kerja. Pada umumnya, sistem kendali merupakan suatu kumpulan peralatan listrik atau elektronik, peralatan mekanik, dan peralatan lain yang menjamin stabilitas dan transisi halus serta ketepatan suatu proses kerja.
Sistem kendali mempunyai tiga unsur yaitu input, proses, dan output.
Gambar 1 Unsur-unsur sistem kendali
PROSES
Input
Output
&%&--4)1&)0%.%6%2
6IRGERE&IPENEV7MW[E
MOD
AL PENGOPERASI
7MWXIQ/IRHEPM0SST8IVXYXYT Input pada umumnya berupa sinyal dari sebuah transduser, yaitu alat yang
dapat merubah besaran fisik menjadi besaran listrik, misalnya tombol tekan, saklar batas, termostat, dan lain-lain. Transduser memberikan informasi mengenai besaran yang diukur, kemudian informasi ini diproses oleh bagian proses. Bagian proses dapat berupa rangkaian kendali yang menggunakan peralatan yang dirangkai secara listrik, atau juga berupa suatu sistem kendali yang dapat diprogram misalnya PLC.
Pemrosesan informasi (sinyal input) menghasilkan sinyal output yang selanjutnya digunakan untuk mengaktifkan aktuator (peralatan output) yang dapat berupa motor listrik, kontaktor, katup selenoid, lampu, dan sebagainya. Dengan peralatan output, besaran listrik diubah kembali menjadi besaran fisik.
Sistem kendali dibedakan menjadi dua, yaitu sistem kendali loop terbuka dan sistem kendali loop tertutup.
7MWXIQ/IRHEPM0SST8IVFYOE
Sistem kendali loop terbuka adalah proses pengendalian di mana variabel input mempengaruhi output yang dihasilkan. Gambar 2 menunjukkan diagram blok sistem kendali loop terbuka.
Gambar 2 Diagram blok sistem kendali loop terbuka
Gangguan
Sistem yang
dikendalikan
Peralatan
Kendali
Output
MOD
AL PENGOPERASI
Dari gambar 2 di atas, dapat dipahami bahwa tidak ada informasi yang diberikan oleh peralatan output kepada bagian proses sehingga tidak diketahui apakah hasil output sesuai dengan yang dikehendaki.
7MWXIQ/IRHEPM0SST8IVXYXYT
Sistem kendali loop tertutup adalah suatu proses pengendalian di mana variabel yang dikendalikan (output) disensor secara kontinyu, kemudian dibandingkan dengan besaran acuan.
Variabel yang dikendalikan dapat berupa hasil pengukuran temperatur, kelembaban, posisi mekanik, kecepatan putaran, dan sebagainya. Hasil pengukuran tersebut diumpan-balikkan ke pembanding (komparator) yang dapat berupa peralatan mekanik, listrik, elektronik, atau pneumatik. Pembanding membandingkan sinyal sensor yang berasal dari variabel yang dikendalikan dengan besaran acuan, dan hasilnya berupa sinyal kesalahan. Selanjutnya, sinyal kesalahan diumpankan kepada peralatan kendali dan diproses untuk memperbaiki kesalahan sehingga menghasilkan output sesuai dengan yang dikehendaki. Dengan kata lain, kesalahan sama dengan nol.
7MWXIQ/IRHEPM0SST8IVFYOE
n
n
MOD
AL PENGOPERASI
40'
Gambar 3 Sistem kendali loop tertutup & 7MWXIQ/IRHEPM40'
Hingga akhir tahun 1970, sistem otomasi mesin dikendalikan oleh relai elektromagnet. Dengan semakin meningkatnya perkembangan teknologi, tugas-tugas pengendalian dibuat dalam bentuk pengendalian terprogram yang dapat dilakukan antara lain menggunakan PLC (Programmable Logic Controller). Dengan PLC, sinyal dari berbagai peralatan luar diinterfis sehingga fleksibel dalam mewujudkan sistem kendali. Disamping itu, kemampuannya dalam komunikasi jaringan memungkinkan penerapan yang luas dalam berbagai operasi pengendalian sistem.
Dalam sistem otomasi, PLC merupakan ‘jantung’ sistem kendali. Dengan program yang disimpan dalam memori PLC, dalam eksekusinya, PLC dapat memonitor keadaan sistem melalui sinyal dari peralatan input, kemudian didasarkan atas logika program menentukan rangkaian aksi pengendalian peralatan output luar.
PLC dapat digunakan untuk mengendalikan tugas-tugas sederhana yang berulang-ulang, atau di-interkoneksi dengan yang lain menggunakan komputer melalui sejenis jaringan komunikasi untuk mengintegrasikan pengendalian proses yang kompleks.
Setting
Gangguan
Sistem yang
dikendalikan
(Proses)
Peralatan
Kendali
Output
Error
Sensor
MOD
AL PENGOPERASI
Cara kerja sistem kendali PLC dapat dipahami dengan diagram blok seperti ditunjukkan pada Gambar 4.
Gambar 4 Diagram blok PLC
Dari gambar terlihat bahwa komponen sistem kendali PLC terdiri atas PLC, peralatan input, peralatan output, peralatan penunjang, dan catu daya. Penjelasan masing-masing komponen sebagai berikut :
40'
PLC terdiri atas CPU (Central Processing Unit), memori, modul
interface input dan output program kendali disimpan dalam memori program. Program mengendalikan PLC sehingga saat sinyal input dari peralatan input on timbul respon yang sesuai. Respon ini umumnya menghidupkan (on) sinyal output pada peralatan output.
CPU adalah mikroprosesor yang mengkordinasikan kerja sistem PLC. ia mengeksekusi program, memproses sinyal input/output, dan mengkomunikasikan dengan peralatan luar.
MOD
AL PENGOPERASI
4IVEPEXER3YXTYX
4IVEPEXER4IRYRNERK
'EXY(E]E
Memori adalah daerah yang menyimpan sistem operasi dan data pemakai. Sistem operasi sesungguhnya software sistem yang mengkordinasikan PLC. Program kendali disimpan dalam memori pemakai.
Ada dua jenis memori yaitu : ROM (Read Only Memory) dan RAM (Random Access Memory). ROM adalah memori yang hanya dapat diprogram sekali. Penyimpanan program dalam ROM bersifat permanen, maka ia digunakan untuk menyimpan sistem operasi. Ada sejenis ROM, yaitu EPROM (Erasable Programmable Read Only Memory) yang isinya dapat dihapus dengan cara menyinari menggunakan sinar ultraviolet dan kemudian diisi program ulang menggunakan PROM Writer.
Interfis adalah modul rangkaian yang digunakan untuk menyesuaikan sinyal pada peralatan luar. Interfis input menyesuaikan sinyal dari peralatan input dengan sinyal yang dibutuhkan untuk operasi sistem. Interfis output menyesuaikan sinyal dari PLC dengan sinyal untuk mengendalikan peralatan output.
4IVEPEXER-RTYX
Peralatan input adalah yang memberikan sinyal kepada PLC dan selanjutnya PLC memproses sinyal tersebut untuk mengendalikan peralatan output. Peralatan input itu antara lain :
Berbagai jenis saklar, misalnya: tombol, saklar togel, saklar batas, saklar level, saklar tekan, saklar proximity.
Berbagai jenis sensor, misalnya: sensor cahaya, sensor suhu, sensor level,
MOD
AL PENGOPERASI
4IVEPEXER3YXTYX
Sistem otomasi tidak lengkap tanpa ada peralatan output yang dikendalikan. Peralatan output itu antara lain:
Kontaktor
Motor listrik
Lampu
Buzzer 4IVEPEXER4IRYRNERK
Peralatan penunjang adalah peralatan yang digunakan dalam sistem kendali PLC, tetapi bukan merupakan bagian dari sistem secara nyata. Maksudnya, peralatan ini digunakan untuk keperluan tertentu yang tidak berkait dengan aktifitas pegendalian. Peralatan penunjang itu, antara lain :
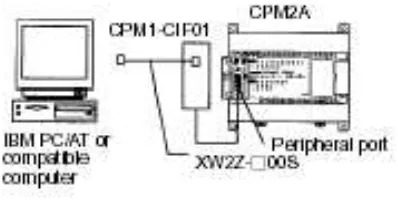
berbagai jenis alat pemrogram, yaitu komputer, software ladder, konsol pemrogram, programmable terminal, dan sebagainya.
Berbagai software ladder, yaitu : SSS, LSS, Syswin, dan CX Programmer.
Berbagai jenis memori luar, yaitu : disket, CD ROM, flash disk.
Berbagai alat pencetak dalam sistem komputer, misalnya printer, plotter.
'EXY(E]E
PLC adalah sebuah peralatan digital dan setiap peralatan digital membutuhkan catu daya DC. Catu daya ini dapat dicatu dari luar, atau dari dalam PLC itu sendiri. PLC tipe modular membutuhkan catu daya dari luar, sedangkan pada PLC tipe compact catu daya tersedia pada unit.
4IVEPEXER-RTYX
MOD
AL PENGOPERASI
8MTI6ERKOEMER3YXTYX ' /SQTSRIR9RMX40'
Unit PLC dibuat dalam banyak model/tipe. Pemilihan suatu tipe harus mempertimbangkan : yang dibedakan menurut
jenis catu daya
jumlah terminal input/output
tipe rangkaian output .IRMW'EXY(E]E
PLC adalah sebuah peralatan elektronik dan setiap peralatan elektronik untuk dapat beroperasi membutuhkan catu daya. Ada dua jenis catu daya untuk disambungkan ke PLC yaitu AC dan DC.
.YQPEL-3
MOD
AL PENGOPERASI
Pada umumnya, jumlah terminal input dan output megikuti perbandingan tertentu, yaitu 3 : 2. Jadi, PLC dengan terminal I/O sebanyak 10 memiliki terminal input 6 dan terminal output 4.
8MTI6ERKOEMER3YXTYX
PLC dibuat untuk digunakan dalam berbagai rangkaian kendali. Bergantung kepada peralatan output yang dikendalikan, tersedia tiga tipe rangkaian output yaitu : output relai, output transistor singking dan output transistor sourcing.
' /SQTSRIR9RMX40'
.IRMW'EXY(E]E
MOD
AL PENGOPERASI
Di bawah ini diberikan tabel yang menunjukkan jenis catu daya, jumlah I/O, dan tipe rangkaian output.
Penjelasan Komponen
1. Terminal input catu daya
Hubungkan catu daya (100 s.d 240 VAC atau 24 VDC) ke terminal ini 2. Terminal Ground Fungsional
MOD
AL PENGOPERASI
3. Terminal Ground Pengaman
Pastikan untuk membumikan terminal ini untuk mengurangi resiko kejutan listrik
4. Terminal catu daya luar
PLC tertentu, misalnya CPM2A dilengkapi dengan terminal output catu daya 24 VDC untuk mencatu daya peralatan input.
5. Terminal input
Sambunglah peralatan input luar ke terminal input ini. 6. Terminal Output
Sambunglah peralatan output luar ke terminal output ini. 7. Indikator status PLC
MOD
AL PENGOPERASI
8. Indikator input
Indikator input menyala saat terminal input yang sesuai ON. Indikator input menyala selama refreshing input/ output.
Jika terjadi kesalahan fatal, indikator input berubah sebagai berikut :
/IWEPELERJEXEP -RHMOEXSVMRTYX
Kesalahan unit CPU, kesalahan bus I/O, atau terlalu banyak unit I/O
Padam
Kesalahan memori atau kesalahan FALS (sistem fatal)
Indikator akan berubah sesuai status sinyal input, tetapi status input tidak akan diubah pada memori.
-RHMOEXSV 7XEXYW %VXM
PWR (hijau)
ON Daya sedang dicatukan ke PLC OFF Daya tidak sedang dicatu ke PLC RUN
(hijau)
ON PLC beroperasi dalam mode RUN atau MONITOR OFF PLC beroperasi dalam mode PROGRAM, atau
terjadi kesalahan fatal COMM
(kuning)
Berkedip Data sedang ditransfer melalui port peripheral atau port RS-232C
OFF Data tidak sedang ditransfer melalui port peripheral atau port RS-232C
ERR/ALM (merah)
MOD
AL PENGOPERASI
9. Indikator output
Indikator output menyala saat terminal output yang sesuai on. 10. Analog Control
Putarlah control ini untuk setting analog (0 s.d 200) pada IR 250 dan IR 251. 11. Port peripheral
Sambungan PLC ke peralatan pemrogram : Konsol Pemrogram, atau komputer
12. Port RS 232C
Sambungan PLC ke peralatan pemrogram : Konsol Pemrogram, komputer, atau Programmable Terminal.
13. Saklar komunikasi
Saklar ini untuk memilih apakah port peripheral atau port RS-232C akan menggunakan setting komunikasi pada PC Setup atau setting standar.
OFF
Port peripheral dan port RS-232C beroperasi sesuai dengan setting komunikasi pada PLC setup, kecuali untuk Konsol Pemrogram yang disambung ke port peripheral.
ON
Port peripheral dan port RS-232C beroperasi sesuai dengan setting komunikasi standar, kecuali untuk Konsol Pemrogram yang disambung ke port peripheral.
14. Batere
Batere ini memback-up memori pada unit PLC. 15. Konektor ekspansi
/IWEPELERJEXEP -RHMOEXSVMRTYX
MOD
AL PENGOPERASI
7TIWMJMOEWM-RTYX
&YXMV 7TIWMJMOEWM
Tempat sambungan PLC ke unit I/O ekspansi atau unit ekspansi (unit I/O
analog, unit sensor suhu).
( 7TIWMJMOEWM
Penggunaan PLC harus memperhatikan spesifikasi teknisnya. Mengabaikan hal ini dapat mengakibatkan PLC rusak atau beroperasi secara tidak tepat (malfungsi).
Berikut ini diberikan spesifikasi unit PLC yang terdiri atas spesifikasi umum, spesifikasi input, dan spesifikasi output.
7TIWMJMOEWM9QYQ
&YXMV 7TIWMJMEWM
Tegangan catu AC 100 s.d 240 VAC, 50/60 Hz
DC 24 VDC
Tegangan operasi
AC 85 s.d 264 VAC
DC 20,4 s.d 26,4 VDC Penggunaan
daya
AC 60 VA maks
DC 20 W maks
Catu daya luar Tegangan catu 24 VDC Kapasitas output 300 mA
Tahanan isolasi 20 M minimum
Kuat dielektrik 2300 VAC 50/60 Hz selama 1 menit
Suhu ruang 0o s.d 55o
MOD
AL PENGOPERASI
Berat AC 650 g
DC 550 g
7TIWMJMOEWM-RTYX
&YXMV 7TIWMJMOEWM
Tegangan input
24 VDC +10%/ -15%
Impedansi input
2,7 k
Arus input 8 mA Tegangan/
arus on
17 VDC input, 5 mA
Tegangan/ arus off
5 VDC maks, 1 mA
Tunda on 10 ms Tunda off 10 ms Konfigurasi
rangkaian input
( 7TIWMJMOEWM
7TIWMJMOEWM9QYQ
&YXMV 7TIWMJMEWM
MOD
AL PENGOPERASI
) 4IVFERHMRKER7MWXIQ/IRHEPM)PIOXVSQEKRIXHER40'
* /IYRKKYPER7MWXIQ/IRHEPM40'
7TIWMJMOEWM3YXTYX
&YXMV 7TIWMJMOEWM
Kapasitas switching maksimum
2 A, 250 VAC (cos = 1) 2 A, 24 VDC
Kapasitas switching minimum
10 mA, 5 VDC
Usia kerja relai Listrik : 150.000 operasi (beban resistif 24 VDC) 100.000 operasi (beban induktif) Mekanik : 20.000.000 operasi
Tunda on 15 ms maks
Tunda off 15 ms maks
Konfigurasi rangkaian output
MOD
AL PENGOPERASI
) 4IVFERHMRKER7MWXIQ/IRHEPM)PIOXVSQEKRIXHER40'
Pada sistem kendali relai elektromagnetik (kontaktor), semua pengawatan ditempatkan dalam sebuah panel kendali. Dalam beberapa kasus panel kendali terlalu besar sehingga memakan banyak ruang (tempat). Tiap sambungan dalam logika relai harus disambung. Jika pengawatan tidak sempurna, maka akan terjadi kesalahan sistem kendali. Untuk melacak kesalahan ini, perlu waktu cukup lama. Pada umumnya, kontaktor memiliki jumlah kontak terbatas. Dan jika diperlukan modifikasi, mesin harus diistirahatkan, dan boleh jadi ruangan tidak tersedia serta pengawatan harus dilacak untuk mengakomodasi perubahan. Jadi, panel kendali hanya cocok untuk proses yang sangat khusus. Ia tidak dapat dimodifikasi menjadi sistem yang baru dengan segera. Dengan kata lain, panel kendali elektromagnetik tidak fleksibel.
Dari uraian di atas, dapat disimpulkan adanya kelemahan sistem kendali relai elektromagnetik sebagai berikut :
Terlalu banyak pengawatan panel.
Modifikasi sistem kendali sulit dilakukan.
Pelacakan gangguan sistem kendali sulit dilakukan.
Jika terjadi gangguan mesin harus diistirahatkan untuk melacak kesalahan sistem.
Kesulitan-kesulitan di atas dapat diatasi dengan menggunakan sistem kendali PLC.
* /IYRKKYPER7MWXIQ/IRHEPM40'
MOD
AL PENGOPERASI
, 0ERKOEL0ERKOEL(IWEMR7MWXIQ/IRHEPM40'
6ERKOYQER
Pengawatan sistem kendali PLC lebih sedikit.
Modifikasi sistem kendali dapat dengan mudah dilakukan dengan cara mengganti progam kendali tanpa merubah pengawatan sejauh tidak ada tambahan peralatan input/output.
Tidak diperlukan komponen kendali seperti timer dan hanya diperlukan sedikit kontaktor sebagai penghubung peralatan output ke sumber tenaga listrik.
Kecepatan operasi sistem kendali PLC sangat cepat sehingga produktivitas meningkat.
Biaya pembangunan sistem kendali PLC lebih murah dalam kasus fungsi kendalinya sangat rumit dan jumlah peralatan input/outputnya sangat banyak.
Sistem kendali PLC lebih andal.
Program kendali PLC dapat dicetak dengan cepat.
+ 4IRIVETER7MWXIQ/IRHEPM40'
Sistem kendali PLC digunakan secara luas dalam berbagai bidang antara lain untuk mengendalikan :
Traffic light
Lift
Konveyor
Sistem pengemasan barang
Sistem perakitan peralatan elektronik
MOD
AL PENGOPERASI
Sistem pembangkitan tenaga listrik
Robot
Pemrosesan makanan
, 0ERKOEL0ERKOEL(IWEMR7MWXIQ/IRHEPM40'
Pengendalian sistem kendali PLC harus dilakukan melalui langkah-langkah sistematik sebagai berikut :
1. Memilih PLC dengan spesifikasi yang sesuai dengan sistem kendali. 2. Memasang Sistem Komunikasi
3. Membuat program kendali
4. Mentransfer program ke dalam PLC 5. Memasang unit
6. Menyambung pengawatan I/O 7. Menguji coba program 8. Menjalankan program
6ERKOYQER
1)
PLC adalah kependekan dari Programmable Logic Controller yang berarti pengendali yang bekerja secara logika dan dapat diprogram.2)
Peralatan sistem kendali PLC terdiri atas Unit PLC, peralatan input, peralatan output, peralatan penunjang, dan catu daya.3)
Pemilihan suatu unit PLC didasarkan atas pertimbangan jenis catu daya untuk PLC, jumlah I/O dan tipe rangkaian output.
+ 4IRIVETER7MWXIQ/IRHEPM40'
MOD
AL PENGOPERASI
/YRGM.E[EFER8IW*SVQEXMJ
4)
Penggunaan PLC harus memperhatikan spesifikasi teknisnya. Mengabaikan hal ini dapat mengakibatkan PLC rusak atau beroperasi secara tidak tepat (malfungsi).5)
Dibandingkan sistem kendali elektromagnet, PLC lebih unggul dalam banyak hal, antara lain pengawatan sistem lebih sederhana, gambar sistem kendali mudah dicetak, lebih murah dalam kasus rangkaian kendali yang rumit, mempunyai fungsi self diagnostic, dll.6)
PLC diterapkan dalam hampir segala lapangan industri sebagai pengendali mesin dan proses kerja alat.8IW*SVQEXMJ
1. Apakah yang dimaksud dengan sistem kendali ?
2. Apakah perbedaan sistem kendali loop terbuka dan loop tertutup ? 3. Apakah sesungguhnya PLC itu ?
4. Sebutkan masing-masing tiga contoh : a. Alat input
b. Alat output c. Alat penunjang
5. Gambarkan diagram blok yang menunjukkan hubungan masing-masing peralatan sistem kendali PLC !
6. Sebutkan lima keunggulan PLC dibandingkan sistem kendali elektromagnet !
7. Jelaskan bahwa sistem kendali PLC lebih murah jika dibandingkan sistem kendali elektromagnet !
MOD
AL PENGOPERASI
/YRGM.E[EFER8IW*SVQEXMJ
1. Sistem kendali adalah suatu peralatan atau sekelompok peralatan yang digunakan untuk mengatur fungsi kerja suatu mesin dan memetakan tingkah laku mesin tersebut sesuai dengan yang dikehendaki.
2. Terletak pada umpan balik hasil pengendalian, yaitu pada sistem kendali loop terbuka variabel yang dikendalikan tidak memberikan umpan balik kepada bagian proses, sedangkan pada sistem kendali loop tertutup, variabel yang dikendalikan memberikan umpan balik kepada bagian proses untuk mengoreksi hasil pengendalian sehingga diperoleh hasil sesuai yang dikehendaki.
3. PLC adalah alat pengendali mesin atau suatu proses yang dapat diprogram. 4. (Periksa tiga jawaban diantara jawaban berikut ini) :
a) tombol, sensor, saklar proximity, rotary encoder, b) lampu, kontaktor/relai, buzer, motor,
c) konsol pemrogram, komputer, software ladder, disket, printer 5.Gambar diagram blok sistem kendali PLC
6. (Periksa lima jawaban diantara jawaban berikut ini) :
CPU
memori
interfis
input
interfis
output
P
er
al
at
an
inp
ut
P
er
al
at
an
o
ut
p
ut
MOD
AL PENGOPERASI
/IKMEXER&IPENEV
8IORMO4IQVSKVEQER40'
% 9RWYV9RWYV4VSKVEQ
a. Pengawatan sistem kendali menjadi berkurang sampai 80%
dibandingkan sistem kendali relai konvensional
b. Konsumsi daya berkurang karena PLC menggunakan daya sedikit. c. Fungsi self diagnostik PLC memungkinkan pelacakan kesalahan
sistem menjadi mudah dan cepat.
d. Modifikasi urutan kendali dapat dengan mudah dilakukan dengan memprogram melalui konsol pemrogram atau software komputer tanpa merubah pengawatan I/O, asal tidak ada tambahan piranti input atau output.
e. Suku cadang sistem PLC untuk relai dan timer sangat berkurang dibandingkan panel kendali konvensional.
f. Waktu siklus mesin meningkat luar biasa karena kecepatan operasi PLC dalam orde mili-detik. Jadi, produktivitas meningkat.
g. Harganya lebih murah dibandingkan sistem konvensional dalam situasi saat jumlah I/O sangat banyak dan fungsi kendalinya rumit. h. Keandalan PLC lebih tinggi daripada relai dan timer mekanik. i. Pencetakan program PLC dapat dilakukan segera dalam bilangan
menit. Maka, salinan dokumentasi dapat menjadi lebih mudah. 7. Dalam kasus rangkaian kendali rumit dan memerlukan banyak timer dan
komponen kendali elektronik, maka PLC lebih murah karena di dalam PLC tersedia fasilitas yang dapat menggantikan kerja peralatan yang
dimaksud. 8. Penerapan PLC
a. Pengendali lampu lalu lintas b. Pengendali robot
MOD
AL PENGOPERASI
/IKMEXER&IPENEV
8IORMO4IQVSKVEQER40'
Tujuan Pembelajaran :
1. Merancang program kendali PLC sederhana 2. Memasukkan program ke dalam PLC 3. Mengecek kebenaran program
Uraian Materi
% 9RWYV9RWYV4VSKVEQ
Program kendali PLC terdiri atas tiga unsur yaitu : alamat, instruksi, dan operand.
Alamat adalah nomor yang menunjukkan lokasi, instruksi atau data dalam daerah memori. Instruksi harus disusun secara berurutan dan menempatkannya dalam alamat yang tepat sehingga seluruh instruksi dilaksanakan mulai dari alamat terendah hingga alamat tertinggi dalam program.
Instruksi adalah perintah yang harus dilaksanakan PLC. PLC hanya dapat melaksanakan instruksi yang ditulis menggunakan ejaan yang sesuai. Oleh karena itu, pembuat program harus memperhatikan tata cara penulisan instruksi.
MOD
AL PENGOPERASI
& &ELEWE4IQVSKVEQER
MOD
AL PENGOPERASI
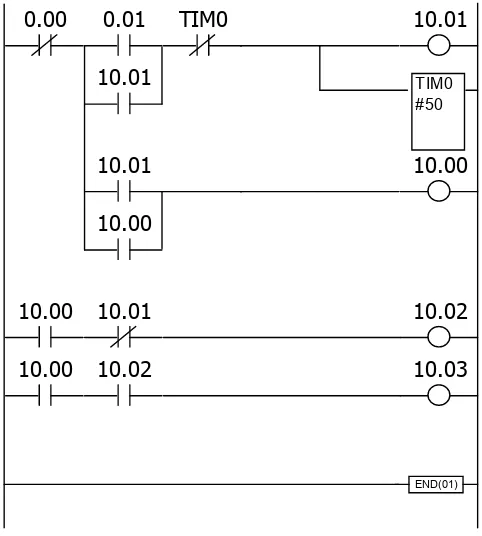
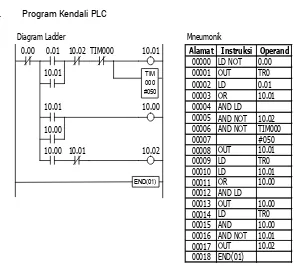
1. Diagram Ladder
Digram ladder terdiri atas sebuah garis vertikal di sebelah kiri yang disebut bus bar, dengan garis bercabang ke kanan yang disebut rung. Sepanjang garis instruksi, ditempatkan kontak-kontak yang mengendalikan/mengkondisikan instruksi lain di sebelah kanan. Kombinasi logika kontak-kontak ini menentukan kapan dan bagaimana instruksi di sebelah kanan dieksekusi. Contoh diagram ladder ditunjukkan pada gambar di bawah ini.
0.00
0.01
TIM0
10.01
10.01
10.01
10.00
10.00
10.00
10.01
10.02
10.00
10.02
10.03
END(01)
TIM0 #50
Gambar 6 Contoh Diagram Ladder
MOD
AL PENGOPERASI
' 7XVYOXYV(EIVEL1IQSVM
(EIVEL(EXE 'LERRIP;SVHW &MX
( -RWXVYOWM4IQVSKVEQER tanpa garis diagonal dan kontak NC (Normally Closed) yang digambar
dengan garis diagonal. Angka di atas kontak menunjukkan bit operand.
2. Kode Mneumonik
Kode mneumonik memberikan informasi yang sama persis seperti halnya diagram ladder. Sesungguhnya, program yang disimpan di dalam memori PLC dalam bentuk mneumonik, bahkan meskipun program dibuat dalam bentuk diagram ladder. Oleh karena itu, memahami kode mneumonik itu sangat penting. Berikut ini contoh program mneumonik :
%PEQEX -RWXVYOWM 3TIVERH
00000 LD HR 01
00001 AND 0.01
00002 OR 0.02
00003 LD NOT 0.03
00004 OR 0.04
00005 AND LD 00006 MOV(21)
0.00 DM 00 00007 CMP(20)
MOD
AL PENGOPERASI
' 7XVYOXYV(EIVEL1IQSVM
Program pada dasarnya adalah pemrosesan data dengan berbagai instruksi pemrograman. Data disimpan dalam daerah memori PLC. Pemahaman daerah data, disamping pemahaman terhadap berbagai jenis instruksi merupakan hal yang sangat penting, karena dari segi inilah intisari pemahaman terhadap program. Data yang merupakan operand suatu instruksi dialokasikan sesuai dengan jenis datanya. Tabel di bawah ini ditunjukkan daerah memori PLC CPM2A sebagai berikut :
(EIVEL(EXE 'LERRIP;SVHW &MX
IR Daerah input IR 000 s.d IR 009 IR 000.00 s.d IR 009.15 Daerah output IR 010 s.d IR 019 IR 010.00 s.d IR 019.15 Daerah ‘kerja’ IR 020 s.d IR 049
IR 200 s.d IR 227
IR 020.00 s.d IR 049.15 IR 200.00 s.d IR 227.15 SR SR 228 s.d SR 255 SR 228.00 s.d SR 255.15
TR --- TR 0 s.d TR 7
HR HR 00 s.d HR 19 HR 00.00 s.d HR 19.15 AR AR 00 s.d AR 23 AR 00.00 s.d AR 23.15 LR LR 00 s.d LR 15 LR 00.00 s.d LR 15.15
TIM/ CNT TC 000 s.d TC 255
( -RWXVYOWM4IQVSKVEQER
Terdapat banyak instruksi untuk memprogram PLC, tetapi tidak semua instruksi dapat digunakan pada semua model PLC. Instruksi pemrograman dapat dikelompokkan sebagai berikut :
MOD
AL PENGOPERASI
Instruksi dasar Instruksi khusus
Klasifikasi menurut kelompok fungsi Instruksi sisi kiri (ladder) Instruksi sisi kanan
Klasifikasi menurut kelompok fungsi Instruksi ladder
Instruksi kendali bit Instruksi timer/ counter Instruksi geser bit Instruksi sub routine Instruksi ekspansi
Pada dasarnya, tingkat pemahaman pemakai PLC ditentukan oleh seberapa banyak instruksi yang telah dipahaminya. Oleh karena itu, untuk pemula berikut ini hanya dijelaskan beberapa instruksi saja. Untuk pendalaman lebih lanjut dapat mempelajari manual pemrograman yang diterbitkan oleh pemilik merk PLC.
-RWXVYOWM(MEKVEQ0EHHIV
Instruksi diagram ladder adalah instruksi sisi kiri yang mengkondisikan instruksi lain di sisi kanan. Pada program diagram ladder instruksi ini disimbolkan dengan kontak-kontak seperti pada rangkaian kendali elektromagnet.
MOD
AL PENGOPERASI
Instruksi diagram ladder terdiri atas enam instruksi ladder dan dua
instruksi blok logika. Instruksi blok logika adalah instruksi yang digunakan
untuk menghubungkan bagian yang lebih kompleks.
Instruksi LOAD dan LOAD NOT
Instruksi LOAD dan LOAD NOT menentukan kondisi eksekusi awal,
oleh karena itu, dalam diagram ladder disambung ke bus bar sisi kiri. Tiap
instruksi memerlukan satu baris kode mneumonik. Kata “instruksi” mewakili
sembarang instruksi lain yang dapat saja instruksi sisi kanan yang akan
dijelaskan kemudian.
Diagram Ladder
Mneumonik
Alamat
Instruksi
Operand
Instruksi
00000 LD
0.00
00001 Instruksi
Instruksi
00002 LD NOT
0.01
00003 Instruksi
0.00
0.01
Gambar 7 Penggunaan Instruksi LOAD dan LOAD NOT
Jika misalnya hanya ada satu kontak seperti contoh di atas, kondisi
eksekusi pada sisi kanan akan ON jika kontaknya ON. Untuk instruksi LD
yang kontaknya NO, kondisi eksekusinya akan ON jika IR 0.00 ON; dan untuk
instruksi LD NOT yang kontaknya NC, akan ON jika IR 0.01 OFF.
Instruksi AND dan AND NOT
Jika dua atau lebih kontak disambung seri pada garis yang sama,
kontak pertama berkait dengan instruksi LOAD atau LOAD NOT dan sisanya
adalah instruksi AND atau AND NOT. Contoh di bawah ini menunjukkan tiga
MOD
AL PENGOPERASI
kontak yang masing-masing menunjukkan instruksi LOAD, AND NOT, dan
AND.
Diagram Ladder
Mneumonik
Alamat
Instruksi
Operand
Instruksi
00000 LD
0.00
00001 AND NOT 0.01
00002 AND
TIM 000
00003 Instruksi
0.00
0.01
TIM 000
Gambar 8 Penggunaan Instruksi AND dan AND NOT
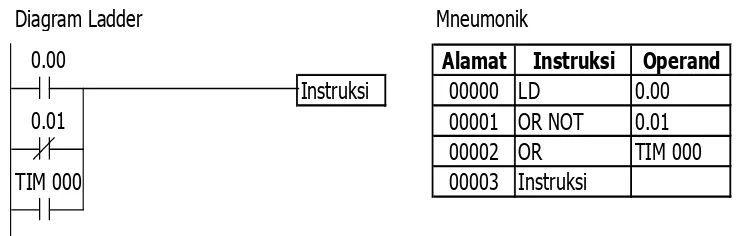
Instruksi OR dan OR NOT
Jika dua atau lebih kontak terletak pada dua instruksi terpisah dan
disambung paralel, kontak pertama mewakili instruksi LOAD atau LOAD NOT
dan sisanya mewakili instruksi OR atau OR NOT. Contoh berikut
menunjukkan tiga kontak yang masing-masing mewakili instruksi LOAD, OR
NOT, dan OR.
Diagram Ladder
Mneumonik
Alamat
Instruksi
Operand
Instruksi
00000 LD
0.00
00001 OR NOT
0.01
00002 OR
TIM 000
00003 Instruksi
0.00
0.01
TIM 000
MOD
AL PENGOPERASI
Instruksi akan mempunyai kondisi eksekusi ON jika salah satu di
antara tiga kontak ON, yaitu saat IR 0.00 ON, saat IR 0.01 OFF, atau saat IR
0.03 ON.
Kombinasi Instruksi AND dan OR
Jika instruksi AND dan OR dikombinasikan pada diagram yang lebih
rumit, mereka dapat dipandang secara individual di mana tiap instruksi
menampilkan operasi logika pada kondisi eksekusi dan status bit operand.
Perhatikan contoh berikut ini hingga yakin bahwa kode mneumonik meliputi
alur logika yang sama dengan diagram ladder.
Gambar 10 Kombinasi Instruksi AND dan OR
Di sini AND terletak di antara statur IR 0.00 dan status IR 0.01
untuk menentukan kondisi eksekusi dengan meng-OR-kan status IR
0.02. Hasil operasi ini menentukan kondisi eksekusi dengan
meng-AND-kan status IR 0.03 yang selanjutnya menentukan kondisi
eksekusi dengan meng-AND-kan kebalikan status IR 0.04.
Diagram Ladder
Mneumonik
Alamat
Instruksi
Operand
Instruksi
00000 LD
0.00
00001 AND
0.01
00002 OR
0.02
00003 AND
0.03
00004 AND NOT
0.04
00005
Instruksi
0.00
0.03
0.04
MOD
AL PENGOPERASI
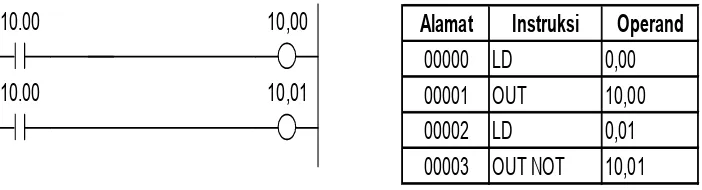
-RWXVYOWM&PSO0SKMOE -RWXVYOWM398HER398238
Cara paling sederhana untuk meng-OUTPUT-kan kombinasi kondisi eksekusi adalah dengan meng-OUTPUT-kan langsung menggunakan instruksi OUTPUT dan OUTPUT NOT. Instruksi ini digunakan untuk mengendalikan status bit operand sesuai dengan kondisi eksekusi. Dengan instruksi OUTPUT, bit operand akan ON selama kondisi eksekusinya ON dan akan OFF selama kondisi eksekusinya OFF. Dengan instruksi OUTPUT NOT, bit operand akan ON selama kondisi eksekusinya OFF dan akan OFF selama kondisi eksekusinya ON.
Alamat
Instruksi
Operand
00000
LD
0,00
00001
OUT
10,00
00002
LD
0,01
00003
OUT NOT
10,01
10,00
10,01
10.00
10.00
Gambar 11 Penggunaan Instruksi OUTPUT dan OUTPUT NOT
Pada contoh di atas, IR 10.00 akan ON jika IR 0.00 ON dan IR 10.01 akan OFF selama IR 0.01 ON. Di sini IR 0.00 dan IR 0.01 merupakan bit input dan IR 10.00 dan IR 10.01 merupakan bit output yang ditetapkan untuk peralatan yang dikendalikan PLC.
-RWXVYOWM)2(
MOD
AL PENGOPERASI
dan memulai eksekusi lagi. Meskipun instruksi END dapat ditempatkan sembarang titik dalam program, tetapi intruksi setelah instruksi END pertama tidak akan diekseksekusi.
Nomor yang mengikuti instruksi END dalam kode mneumonik adalah kode fungsinya, yang digunakan saat memasukkan instruksi ke dalam PLC menggunakan konsol pemrogram.
Instruksi END tidak memerlukan operand dan tidak boleh ada kontak ditempatkan pada garis instruksi yang sama. Jika dalam program tidak ada instruksi END, program tersebut tidak akan dieksekusi.
Diagram Ladder
Mneumonik
Alamat
Instruksi
Operand
Instruksi
00000 LD
0.00
00001 AND NOT
0.01
END(01)
00002 Instruksi
00003 END(01)
0.00
0.01
Gambar 12 Penggunaan Instruksi END(01)
-RWXVYOWM&PSO0SKMOE
Jika rangkaian logika tidak dapat diwujudkan dengan instruksi AND, AND NOT, OR, atau OR NOT saja, maka perlu menggunakan instruksi blok logika. Perbedaannya adalah bahwa instruksi AND, AND NOT, OR, dan OR NOT mengkombinasikan antar kondisi eksekusi dengan suatu bit operand, sedangkan instruksi blok logika yang terdiri dari instruksi AND LOAD dan OR LOAD mengkombinasikan kondisi eksekusi dengan kondisi eksekusi terakhir yang belum digunakan.
-RWXVYOWM398HER398238
00
01
00
00
MOD
AL PENGOPERASI
E 1IRKOSHI-RWXVYOWM7MWM/ERER+ERHE Instruksi blok logika tidak diperlukan dalam program diagram ladder,
tetapi diperlukan hanya pada program mneumonik.
Instruksi AND LOAD
Instruksi AND LOAD meng-AND-kan kondisi eksekusi yang dihasilkan oleh dua blok logika.
Diagram Ladder Mneumonik
Alamat Instruksi Operand
Instruksi 00000 LD 0.00
00001 OR 0.01
00002 LD NOT 0.02
00003 OR 0.03
00004 AND LD 00005 Instruksi
0.00 0,02
0,01 0,03
Gambar 13 Penggunaan Instruksi AND LOAD
Instruksi OR LOAD
Instruksi OR LOAD meng-OR-kan kondisi eksekusi yang dihasilkan oleh dua blok logika.
MOD
AL PENGOPERASI
Diagram Ladder Mneumonik
Alamat Instruksi Operand
Instruksi 00000 LD 0.00
00001 AND NOT 0.01
00002 LD 0.02
00003 ND 0.03
00004 OR LD 00005 Instruksi
0.00 0.01
0.02 0.03
Gambar 14 Penggunaan Instruksi OR LOAD
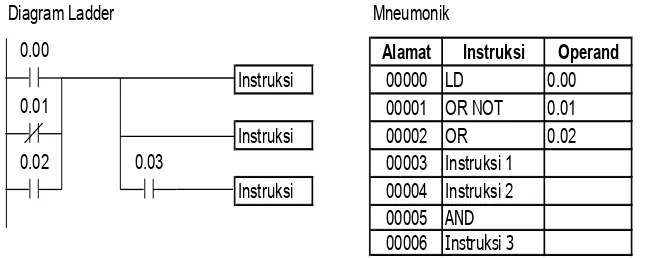
E 1IRKOSHI-RWXVYOWM7MWM/ERER+ERHE
Jika terdapat lebih dari satu instruksi sisi kanan dengan kondisi eksekusi yang sama, masing-masing dikode secara berurutan mengikuti kondisi eksekusi terakhir pada garis instruksi. Pada contoh di bawah ini, garis instruksi terakhir berisi satu kontak lagi yang merupakan instruksi AND terhadap IR 0.03.
Diagram Ladder
Mneumonik
Alamat
Instruksi
Operand
Instruksi
00000 LD
0.00
00001 OR NOT
0.01
Instruksi
00002 OR
0.02
00003 Instruksi 1
Instruksi
00004 Instruksi 2
00005
AND
00006
Instruksi 3
0.00
0.01
0.02
0.03
MOD
AL PENGOPERASI
4IRKKYREER&MX86
Bit TR (Temporarily Relay) digunakan untuk mempertahankan kondisi eksekusi pada garis instruksi bercabang. Hal ini dipertahankan karena garis instruksi dieksekusi menuju ke instruksi sisi kanan sebelum kembali ke titik cabang untuk mengeksekusi instruksi lainnya. Jika ada kontak pada garis instruksi setelah titik cabang, kondisi eksekusi untuk instruksi yang pertama tidak sama dengan kondisi pada titik cabang sehingga untuk mengeksekusi instruksi berikutnya menggunakan kondisi eksekusi titik cabang dan kontak lain setelah titik cabang tersebut.
Jika program dibuat dalam bentuk diagram ladder, tidak perlu memperhatikan bit TR karena bit TR hanya relevan pada pemrograman bentuk mneumonik.
MOD
AL PENGOPERASI
Alamat
Instruksi Operand
00000 LD NOT
0,00
00001 OUT
TR0
00002 AND
0.01
00003 OUT
10.00
00004 LD NOT
TR0
00005 AND
0.02
00006 OUT
10.01
10,01
0,00
10,00
0.02
0,01
Gambar 16 Penggunaan Bit TR
Contoh berikut ini menunjukkan penggunaan dua bit TR yaitu TR0 dan TR1 pada sebuah program.
Alamat Instruksi Operand
00000 LD NOT 0,00 00001 OUT TR0 00002 AND 0.01 00003 OUT TR1 00004 AND 0.02 00005 OUT 10.00 00006 LD NOT TR1 00007 AND 0.03 00008 OUT 10.01 00009 LD NOT TR0 00010 AND 0.04 00011 OUT 10.02 10,00
0.04 0,01 0.02
0.03 0,00
10,01
10.02
MOD
AL PENGOPERASI
-RWXVYOWM8MQIV 4IRKKYREER&MX/IVNE-RXIVREP6IPE]
Dalam pemrograman, mengkombinasikan kondisi untuk menghasilkan kondisi eksekusi secara langsung sering sangat sulit. Kesulitan ini dapat diatasi dengan mudah menggunakan bit kerja untuk men-trigger instruksi lain secara tidak langsung.
Bit kerja tidak ditransfer dari atau ke dalam PLC. Semua bit pada daerah IR yang tidak dialokasikan sebagai bit input/output dan bit pada daerah AR (Auxilary Relay) dapat digunakan sebagai bit kerja. Bit input/output dan bit yang dialokasikan untuk keperluan tertentu tidak dapat digunakan sebagai bit kerja.
Jika mengalami kesulitan pada pemrograman suatu program pengendalian pertimbangan pertama harus diberikan pada bit kerja untuk menyederhanakan program.
MOD
AL PENGOPERASI
Alamat Instruksi Operand
00000 LD 0.00 00001 AND NOT 0.01 00002 OR 0.02 00003 OR NOT 0.03 00004 OUT 216.00 00005 LD 216.00 00006 AND 0.04 00007 AND NOT 0.05 00008 OUT 200.00 00009 LD 216.00 00010 OR NOT 0.04 00011 AND 0.06 00012 OUT 200.01 0.04 0.03 216.00 0.06 216.00 216.00 200.01 200.00 0.02 0.00 0.04 0.01 0.05
Gambar 18 Penggunaan Bit Kerja
-RWXVYOWM8MQIV
Instruksi Timer digunakan untuk operasi tunda waktu. Ia memerlukan dua operand yang terletak pada dua baris instruksi, yaitu baris pertama untuk nomor timer dan baris kedua untuk setting waktu (SV = Set Value). Meskipun demikian, instruksi Timer terletak dalam satu alamat.
Nomor Timer dipakai bersama untuk nomor Counter. Nomor Timer/Counter hanya boleh digunakan sekali. Maksudnya, sekali nomor Timer/Counter telah digunakan, ia tidak boleh digunakan untuk instruksi Timer/Counter yang lain. Tetapi, nomor timer sebagai operand suatu kontak dapat digunakan sebanyak yang diperlukan.
Banyaknya nomor Timer/Counter bergantung kepada tipe PLC. Misalnya, PLC OMRON CPM1A, terdapat 128 nomor, yaitu dari 000 sampai dengan 127. tidak diperlukan awalan apapun untuk menyatakan nomor timer. Tetapi, jika nomor timer sebagai operand suatu kontak harus diberi awalan TIM.
MOD
AL PENGOPERASI
SV dapat berupa konstanta atau alamat channel/words. Jika channel daerah IR sebagai unit input dimasukkan sebagai alamat channel, unit input ini harus disambung sedemikian sehingga SV dapat diset dari luar. Timer/Counter yang disambung dengan cara ini hanya dapat diset dari luar dalam mode MONITOR atau RUN. Semua SV, termasuk yang diset dari luar harus dalam BCD (Binary Coded Decimal), yaitu bilangan desimal yang dikode biner. Penulisan SV harus diawali dengan tanda #.
Simbol Timer TIM
N N : Nomor Timer/ Counter #SV SV : Set Value dalam BCD
Diagram Waktu
on kondisi eksekusi
off
SV SV
Gambar 19 Diagram Waktu Instruksi Timer
MOD
AL PENGOPERASI
SV mempunyai harga antara 0000 sampai dengan 9999 (BCD) dalam satuan detik-detik. Jadi, misalnya menghendaki 10 detik, maka nilai SV harus 100. Jika SV dinyatakan tidak dalam BCD, akan muncul pesan kesalahan.
Di bawah ini diberikan program-program penerapan timer.
a. Tunda on (1)
Alamat
Instruksi
Operand
00000 LD
0.00
00001 TIM
0.00
#050
TIM000
10.00
00002 LD
TIM 000
00003 OUT
10.00
0.00
TIM000 #050
Gambar 20 Program Tunda On
Jika kondisi eksekusi timer (hanya ditentukan oleh kontak 0.00) on, maka timer aktif. Lima detik kemudian (completion flag timer on) kontak TIM 000 on hingga selanjutnya output 10.00 on. Jika lama kontak 0.00 on lebih pendek daripada SV, maka completion flag tetap off dan output 10.00 juga tetap off.
MOD
AL PENGOPERASI
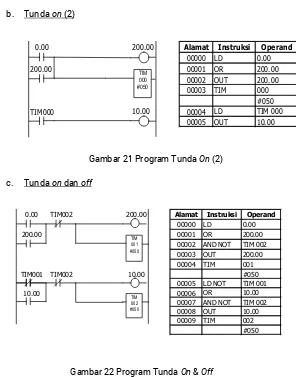
* )OWIOYWMTVSKVEQ b. Tunda on (2)
200.00 Alamat Instruksi Operand
00000 LD 0.00
200.00 00001 OR 200.00
00002 OUT 200.00 00003 TIM 000
#050 TIM000 10.00 00004 LD TIM 000
00005 OUT 10.00 0.00
TIM 000 #050
Gambar 21 Program Tunda On (2) c. Tunda on dan off
Alamat Instruksi Operand
00000 LD 0.00 00001 OR 200.00 00002 AND NOT TIM 002 00003 OUT 200.00 00004 TIM 001
#050 00005 LD NOT TIM 001 00006 OR 10.00 00007 AND NOT TIM 002 00008 OUT 10.00 00009 TIM 002
#050 0.00 TIM002 10.00 TIM002 200.00 10.00 TIM001 200.00 TIM 001 #050 TIM 002 #050
Gambar 22 Program Tunda On & Off
) 4IVMRKEXERHEPEQTIQVSKVEQER
Untuk mengurangi kemungkinan terjadinya kesalahan dalam merancang program kendali, perlu diingat hal-hal sebagai berikut :
MOD
AL PENGOPERASI
b. Diantara dua garis instruksi tidak boleh ada kondisi yang melintas secara vertikal.
c. Tiap garis instruksi harus memiliki sedikitnya satu kondisi yang menentukan eksekusi instruksi sisi kanan, kecuali untuk instruksi END(01), ILC(03) dan JME(05).
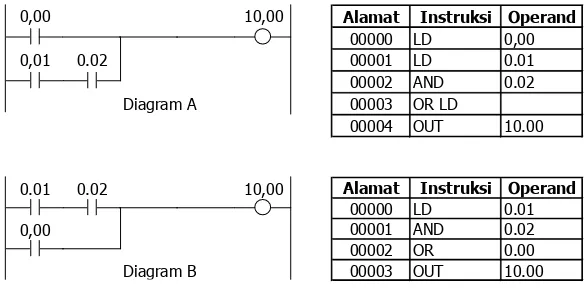
d. Dalam merancang diagram ladder harus memperhatikan kemungkinan instruksi yang diperlukan untuk memasukannya. Misalnya, pada gambar A di bawah ini diperlukan instruksi OR LOAD. Hal ini dapat dihindari dengan menggambar ulang diagram ladder seperti gambar B.
Alamat Instruksi Operand
00000 LD 0,00 00001 LD 0.01 00002 AND 0.02 Diagram A 00003 OR LD
00004 OUT 10.00
Alamat Instruksi Operand
00000 LD 0.01 00001 AND 0.02 00002 OR 0.00 Diagram B 00003 OUT 10.00 0,00
0.02 0.01
10,00
10,00 0,01 0.02
0,00
Gambar 23 Penyederhanaan Program Logika * )OWIOYWMTVSKVEQ
Saat eksekusi program, PLC men-scan program dari atas ke bawah, mengecek semua kondisi, dan mengeksekusi semua instruksi. Instruksi harus ditempatkan dengan tepat, misalnya data yang dikehendaki dipindahkan ke words sebelum words tersebut digunakan sebagai operand instruksi. Ingat bahwa garis instruksi berakhir pd instruksi terminal sisi kanan, setelah itu baru mengeksekusi garis instruksi bercabang ke instruksi terminal yang lain.
TIM
IM
IM
MOD
AL PENGOPERASI
G
, 4VSKVEQ/IRHEPM1SXSV
Eksekusi program semata-mata merupakan salah satu tugas yang dilakukan oleh
PLC sebagai bagian dari waktu siklus. + 0ERKOELPERKOELTIQFYEXERTVSKVEQ
Untuk membuat program kendali PLC ditempuh melalui langkah-langkah sistematis sebagi berikut :
E Menguraikan urutan kendali
Pembuatan program diawali dengan penguraian urutan kendali. Ini dapat dibuat dengan menggunakan kalimat-kalimat logika, gambar-gambar, diagram waktu, atau bagan alir (flow chart).
F Menetapkan bit operand untuk peralatan input/output.
Bit operand untuk peralatan input/output mengacu pada daerah memori PLC yang digunakan. Bit operand dapat dipilih secara bebas sejauh berada pada jangkah daerah memori yang dalokasikan. Tetapi, penggunaan secara bebas sering menjadikan ketidak-konsistenan sehingga menjadikan program kendali keliru. Oleh sebab itulah penggunaan bit operand harus ditetapkan sebelum program dibuat. Inventarisir semua peralatan input dan output yang akan disambung ke PLC, kemudian tetapkan bit operandnya.
Jumlah bit operand yang tersedia bergantung kepada tipe PLC yang dispesifikasikan menurut jumlah input-outputnya. Perbandingan jumlah bit input dan output pada umumnya 3 : 2. Misalnya PLC dengan I/O 10 memiliki bit input sejumlah 6 dan bit output 4. Di bawah ini diberikan contoh daerah memori PLC OMRON CPM1A-10CDRA.
(EIVEL(EXE ;SVHW &MX
IR (Internal Relay)
Input 0 0.00 – 0.11
MOD
AL PENGOPERASI
Kerja (internal) 200 – 231 200.00 – 231.15
TR (Temporarilly Relay) TR0 – TR7
Timer/counter TC0 – TC7
G Membuat program kendali
Program kendali PLC dapat dibuat dengan diagram ladder atau kode mneumonik. Pemilihan tipe program sesuai dengan jenis alat pemrogram yang akan digunakan untuk memasukkan program ke dalam PLC. Jika menggunakan komputer pilihlah diagram ladder dan jika menggunakan konsol pemrogram gunakan kode mneumonik.
, 4VSKVEQ/IRHEPM1SXSV
Terdapat berbagai macam operasi motor induksi, suatu motor yang paling banyak digunakan sebagai penggerak mesin industri. Tetapi, hanya ada beberapa prinsip operasi motor induksi yaitu :
Operasi motor satu arah putaran
Operasi motor dua arah putaran
Operasi motor dua kecepatan
Operasi motor start bintang segitiga
Operasi beberapa motor kendali kerja berurutan
+ 0ERKOELPERKOELTIQFYEXERTVSKVEQ
E
F
MOD
AL PENGOPERASI
4VSKVEQ/IRHEPM1SXSV(YE%VEL4YXEVER
4VSKVEQ/IRHEPM1SXSV7EXYEVEL4YXEVER
a. Urutan Kendali Motor
Jika tombol Start ditekan, motor berputar searah jarum jam,
dan jika kemudian tombol Start dilepaskan1), motor tetap berputar
dalam arah yang sama. Jika tombol Stop ditekan, motor berhenti
berputar.
b. Penetapan Bit I/O
No Alat input/output Bit operand Fungsi
1 Tombol Stop 0.00 Menghentikan operasi motor
2 Tombol Start 0.01 Menjalankan motor
3 Kontaktor2) 10.00 Menghubungkan motor ke jaringan
Keterangan :
1) Kecuali untuk operasi yang sangat khusus, secara
umum operasi menjalankan motor adalah dengan menekan
tombol Start dan jika kemudian tombol ini dilepas motor
akan tetap berputar. Maka, selanjutnya untuk menjalankan
motor cukup disebutkan dengan menekan tombol Start saja.
2) Motor berdaya kecil dapat disambung langsung ke
PLC. Tetapi, untuk motor berdaya cukup dengan arus
nominal diatas kemampuan PLC harus menggunakan
MOD
AL PENGOPERASI
c. Program Kendali PLC
Diagram Ladder Mneumonik
Alamat Instruksi Operand
00000 LD 0.01 00001 OR 10.00 00002 AND NOT 0.00 00003 END(01)
10.00 0.01
10.00 0.00
END(01)
Gambar 24 Program Kendali Motor Satu Arah Putaran
4VSKVEQ/IRHEPM1SXSV(YE%VEL4YXEVER
a. Urutan Kendali Motor
Jika tombol Forward (FWD) ditekan, motor berputar searah jarum jam dan jika yang ditekan tombol Reverse (REV), motor berputar berlawanan arah jarum jam. Tombol STOP digunakan untuk menghentikan operasi motor setiap saat.
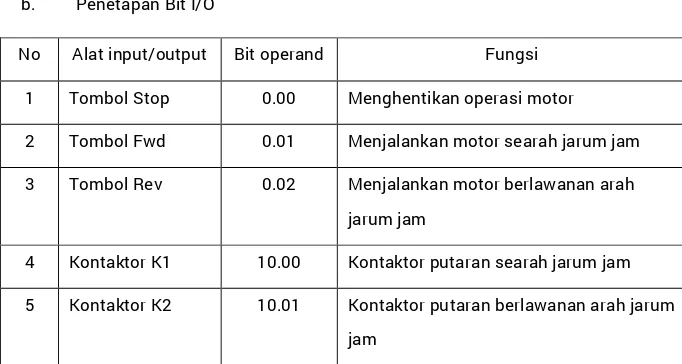
b. Penetapan Bit I/O
No Alat input/output Bit operand Fungsi 1 Tombol Stop 0.00 Menghentikan operasi motor 2 Tombol Fwd 0.01 Menjalankan motor searah jarum jam 3 Tombol Rev 0.02 Menjalankan motor berlawanan arah
jarum jam
4 Kontaktor K1 10.00 Kontaktor putaran searah jarum jam 5 Kontaktor K2 10.01 Kontaktor putaran berlawanan arah jarum
MOD
AL PENGOPERASI
4VSKVEQ/IRHEPM1SXSV7MWXIQ7XEVX&MRXERK7IKMXMKE c. Program Kendali PLC
Diagram Ladder Mneumonik
Alamat Instruksi Operand
00000 LD NOT 0,00 00001 OUT TR0 00002 LD 0,01 00003 OR 10,00 00004 AND LD
00005 AND NOT 10,01 00006 OUT 10 00007 LD TR0 00008 LD 0,02 00009 OR 10,01 00010 AND LD
00011 AND NOT 10,00 00012 OUT 10,01 00013 END(01)
10,00 10,00
0,01 10,01 0,00
0,02 10,00 10,01 10,01
END(01)
Gambar 25 Program Kendali Motor Dua Arah Putaran
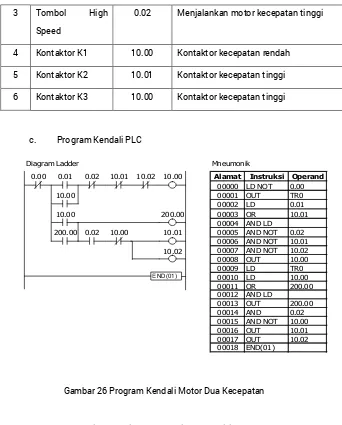
4VSKVEQ/IRHEPM1SXSV(YE/IGITEXER
a. Urutan Kendali Motor
Jika tombol LOW ditekan, motor berputar dalam kecepatan rendah, dan jika kemudian tombol High ditekan motor berputar dalam kecepatan tinggi. Motor tidak dapat di-start langsung pada kecepatan tinggi dan pada kecepatan tinggi motor tidak dapat dipindahkan ke kecepatan rendah. Tombol Stop untuk menghentikan operasi motor.
b. Penetapan Bit I/O
No Alat input/output Bit operand Fungsi 1 Tombol Stop 0.00 Menghentikan operasi motor
2 Tombol Low
Speed
MOD
AL PENGOPERASI
3 Tombol High
Speed
0.02 Menjalankan motor kecepatan tinggi
4 Kontaktor K1 10.00 Kontaktor kecepatan rendah 5 Kontaktor K2 10.01 Kontaktor kecepatan tinggi 6 Kontaktor K3 10.00 Kontaktor kecepatan tinggi
c. Program Kendali PLC
Diagram Ladder Mneumonik
Alamat Instruksi Operand 00000 LD NOT 0.00 00001 OUT TR0 00002 LD 0.01 00003 OR 10.01 00004 AND LD
00005 AND NOT 0.02 00006 AND NOT 10.01 00007 AND NOT 10.02 00008 OUT 10.00 00009 LD TR0 00010 LD 10.00 00011 OR 200.00 00012 AND LD
00013 OUT 200.00 00014 AND 0.02 00015 AND NOT 10.00 00016 OUT 10.01 00017 OUT 10.02 00018 END(01) 10.02
200.00
200.00 0.02 10.00 10.01 10.00 10.00 0.01 0.02 10.00 10.02 10.01 0.00 END(01)
Gambar 26 Program Kendali Motor Dua Kecepatan
4VSKVEQ/IRHEPM1SXSV7MWXIQ7XEVX&MRXERK7IKMXMKE
a. Urutan Kendali Motor
Jika tombol Start ditekan, motor berputar dalam sambungan bintang. Lima detik kemudian, motor berputar dalam sambungan
MOD
AL PENGOPERASI
8YKEW
segitiga. Tombol Stop untuk menghentikan operasi motor setiap
saat.
b. Penetapan Bit I/O
No Alat input/output Bit operand Fungsi 1 Tombol Stop 0.00 Menghentikan operasi motor 2 Tombol Start 0.01 Menjalankan motor
MOD
AL PENGOPERASI
c. Program Kendali PLC
Diagram Ladder Mneumonik
Alamat Instruksi Operand
00000 LD NOT 0.00 00001 OUT TR0 00002 LD 0.01 00003 OR 10.01 00004 AND LD 00005 AND NOT 10.02 00006 AND NOT TIM000 00007 #050 00008 OUT 10.01 00009 LD TR0 00010 LD 10.01 00011 OR 10.00 00012 AND LD 00013 OUT 10.00 00014 LD TR0 00015 AND 10.00 00016 AND NOT 10.01 00017 OUT 10.02 00018 END(01) TIM000 10.01 10.01 0.01 10.02 0.00 10.01 10.01 10.00 10.02 10.00 10.00 END(01) TIM 000 #050
Gambar 27 Program Kendali Motor Start Bintang Segitiga 8YKEW
Buatlah program diagram ladder dan mneumonik untuk operasi motor bolak balik otomatis sebagai berikut : Jika tombol Start ditekan, motor berputar searah jarum jam selama 1 menit, kemudian berhenti. Sepuluh detik kemudian, motor berputar berlawanan arah jarum jam selama 1 menit, kemudian berhenti. Selanjutnya, motor beroperasi seperti di atas secara otomatis tanpa melalui penekanan tombol Start. Tombol Off digunakan untuk menghentikan operasi motor setiap saat.
MOD
AL PENGOPERASI
8IW*SVQEXMJ 6ERKOYQER
1. Program kendali PLC terdiri atas tiga unsur yaitu alamat, instruksi dan operand.
2. Program PLC dapat dibuat dengan diagram ladder atau kode mneumonik. Pemilihan tipe program ditentukan oleh alat pemrogram yang akan digunakan.
3. Untuk dapat membuat program kendali PLC, pemrogram harus memahami struktur daerah memori PLC yang akan digunakan. Daerah memori PLC berbeda-beda sesuai dengan tipe PLC.
4. Memahami instruksi pemrograman memegang peranan paling penting dalam pembuatan program kendali. Terdapat banyak sekali instruksi pemrograman, tetapi tidak semua instruksi dapat diterapkan pada semua tipe PLC.
5. Setiap program selalu diawali dengan instruksi LOAD dan diakhiri dengan instruksi END. Tanpa instruksi END program tidak dapat dieksekusi. 6. Program dieksekusi dengan men-scan mulai dari alamat terendah hingga ke
alamat tertinggi yaitu instruksi END. Pada diagram ladder ini berarti program dieksekusi mulai dari atas ke bawah bila garis instruksi bercabang, dan kemudian ke kanan hingga mengeksekusi instruksi sisi kanan.
7. Pembuatan program PLC harus dilakukan secara sistematis, yaitu mendeskripsikan sistem kendali, menetapkan operand untuk alat input/output, baru membuat program.
<