Transformasi Z
4
Materi :
• Definisi Transformasi z
• Daerah Konvergensi (Region of Convergence)
• Diagram Pole Zero
• Sifat Transformasi z
• Transformasi z dalam Bentuk Polinomial Rasional
• Fungsi Sistem atau Fungsi Transfer H(z) dari Sistem Linier
Tidak Berubah terhadap Waktu
• Fungsi Sistem untuk Sistem yang Dinyatakan dalam
Persamaan Perbedaan Koefisien Konstan Linier
• Invers Transformasi z
Transformasi Z
4
4.1 Definisi Transformasi z
kompleks
variabel
adalah
dimana
kan
didefinisi
diskrit
sinyal
dari
z
si
Transforma
,
jω -n -nre
z
x(n)z
X(z)
x(n)
Re{z}
Im{z}
ROC
a
4.2 Daerah Konvergensi (ROC)
Nilai z yang menyebabkan X(z) konvergen didefinisikan pada daerah
di bidang z yang disebut daerah konvergensi, region of convergence
(ROC).
ROC didefinisikan dalam 𝑧 berupa daerah pada bidang z yang dibatasi
Transformasi z dapat dianggap sebagai Transformasi Fourier Waktu Diskrit (TFWD) dari , .
( )
Bila ROC mencakup lingkaran satuan (| | 1), ( ) mempunyai TFWD (finite
n x n r n n j n X z x n z x n r e n n z x n
energy sequence)bidang z
Re{z}
Im{z}
ROC mencakup lingk. satuan
TFWD
Sifat-sifat ROC
– ROC dari X(z) adalah daerah yang dibatasi lingkaran pada bidang z yang
berpusat pada titik nol.
– Transformasi Fourier dari x(n) adalah konvergen jika dan hanya jika ROC dari
x(n)
mencakup lingkaran satuan.
– Pada ROC tidak boleh terdapat pole .
– Bila x(n) adalah deret dengan panjang terbatas maka ROC adalah seluruh
bidang z ,dengan kemungkinan pengecualian pada z=0 atau z=
.
– Bila x(n) adalah deret sisi kanan yaitu deretan yang bernilai nol untuk n <N
1<
,
ROC adalah daerah dibagian luar dari pole terluar X(z) hingga
(kemungkinan) mencakup z=
.
– Bila x(n) adalah deret sisi kiri yaitu deretan yang bernilai nol untuk n>N
2>-
,
ROC adalah daerah dibagian dalam dari pole terdalam X(z) hingga
(kemungkinan) mencakup z=0.
– Bila x(n) adalah deretan dua sisi maka ROC akan berbentuk cincin yang
dibatasi oleh pole terluar dan terdalam dan tidak mengandung satu pun pole
pada daerah konvergensinya.
Contoh deretan sisi kanan
•
•
akan konvergen untuk |az
-1| < 1
sehingga ROC adalah |z| > |a|
•
|a| < 1 finite energy sequence
•
|a| > 1 (divergent sequence, infinite energy, TFWD tidak ada tetapi TZ ada yaitu
|z| > a (ROC)
1 01
( )
1
n n n nx n
a u n
X z
a z
az
n
-1 1 2 3 4 -2• Contoh deretan sisi kiri (anti causal)
n
-1 1 2 3 4 -2 -3 -4 -5
1 1 1 1 0 1 1 1 1 1 1 11
1
1
1
1
1
1
1
1
1
1
1
n n n n n n n n n n n n n n nx n
a u
n
X z
a u
n
z
a z
a z
a z
a z
az
az
az
az
az
a z
az
akan konvergen untuk |a
-1z| < 1
•
Contoh deretan :
11
( )
1
X z
az
bidang z
Re
Im
|
a|
ROC |z| > |a|
x(n) = a
nu(n)
n
ROC |z| < |a|
x(n) = -a
nu(-n-1)
n
deretan sisi kiri
deretan sisi kanan
1 1 ( ) , 1 1 dan 2 1 1 1 1 1 1 2 X z a a a z a z
•
Misal
•
ROC tidak dispesifikasikan maka kemungkinan deretan-deretan x(n) adalah ...
a
1
n
u(n)
n
-
a
1
n
u(-n-1)
n
atau
n
-a
2
n
u(-n-1)
n
a
2
n
u(n)
atau
ROC: |z| > |a
1
| and |z| > |a
2
|
Im
Re
|
a
1|< |a
2|
Im
1
1
( )
1
1
1
1
1
2
X z
a z
a z
n
x(n) = a
1
n
u(n) + a
2
n
u(n)
Im
Re
|a
1|<
|
a
2|
Im
n
x(n) = -a
1
n
u(-n-1) - a
2
n
u(-n-1)
ROC: |z| < |a
1
| and |z| < |a
2
|
1
2
1
1
1
1
1
1
)
(
z
a
z
a
z
X
ROC: |z| > |a
1
| and |z| < |a
2
|
Im
Re
|
a
1|
<
|
a
2|
Im
1
1
( )
1
1
1
1
1
2
X z
a z
a z
n
x(n) = a
1
n
u(n) - a
2
n
u(-n-1)
ROC: |z| < |a
1
| and |z| > |a
2
|
Re
|
a
1|<
|
a
2|
Im
1
1
( )
1
1
1
1
1
2
X z
a z
a z
n
x(n) = -a
1
n
u(-n-1) + a
2
n
u(n)
•
Deretan eksponensial dua sisi
•
Tidak ada overlap pada ROC, TZ tidak ada
(tidak konvergen untuk nilai z berapapun)
,
-1
n
x n
a
n
n
n
a u n
a u
n
ROC
|z| > |a|
ROC
|z| < |a|
Re
|
a|
Im
n
Pole dinotasikan dengan x dan zero dengan o pada bidang kompleks z :
bidang z
Re{z}
Im{z}
1
o o o o
pole - pole pk (merupakan pasangan konjugat kompleks bila g(n) riil)Zero-zero z
k• G
(
z
): fungsi kompleks dari variabel kompleks
•
Bidang perpotongan antara permukaan G(z) dan silinder (|z| = 1
z = e
jw) adalah G(e
jw)
yaitu TFWD
Bidang Z dan TFWD
Bila ( ) , ( ) , -maka : ( ) ( ) ( ) n x n X z x n z Rx z Rx n n y n Y z y n z Ry z Ry n n n ax n by n X z ax n z by n z n n ax n by n aX z bY z
max -, - min , 1 1 1 Contoh: 2 1 1 1 2 2 1 1 1 3 1 1 1 3 3 1 1 1 maka 2 1 1 1 1 1 1 2 3 Rx Ry z Rx Ry n x n u n z z n y n u n z z x n y n z z z 4.4 Sifat Transformasi z
4.4.1 Linier
0 0 0 0 0 0 0 0 1 1 Contoh: cos 0 . . . 2 2 1 . 1 1 1 1 . 1 1 1 1 1 1 1 1 1 1 21 21 j n j n x n n u n e u n e u n j n e u n z j e z j n e u n z j e z X z z j j e z e z
0 0 0 0 1 1 cos 0 cos 0 . 1 1 2 1 2 cos 0 1 1 sin 0 . . . 2 2 1 1 1 1 1 1 2 1 1 sin 0 z n u n z z z j n j n x n n u n e u n e u n j j X z z j j j e z e z
.
1 sin 0 1 1 2 1 2 cos 0 z n u n z z z
0 0 0 Bila ( ) , - maka : 0 ( ) - Bukti : 0 0 = ( ) n x n X z x n z Rx z Rx n n x n n z X z Rx z Rx k n n n x n n x n n z x k z z X z n k
-Daerah konvergensi dan 0 sama dengan kemungkinan pengecualian di z=0 atau z=
1 2 3 4 Contoh: 2 1 3 2 2 3 4 1 2. 3. 2. 0 Rx z Rx x n x n n x n
n
n
n
n
n z z z z z
2 1 2 2 2 2 1 3 2 1 2 2. 3 2. 0< 2 3 4 5 6 2 2 2 3 3 4 2 5 6 2. 3. 2. 0 4 3 2 4 4 2 3 3 2 2 1 2. 3. x n n n n n n z z z z z x n n n n n n z z z z z z x n n n n n n z z z
2.z1 z 4.4.2 Pergeseran Deretan
Bila
( )
-
1
maka :
.
.
=
.
1
-
Contoh:
cos
0
.
x n
X z
R
x
z
R
x
n
n
n
n
a x n
a x n z
x n
a
z
n
n
n
a x n
X a
z
a R
x
z
a R
x
n u n
1
1
cos 0
1
1
2
1 2
cos 0
1
1
cos 0
cos
0
.
1
2
2
1 2
cos 0
1 sin
0
sin
0
.
1
1
2
1 2
cos 0
z
z
z
z
az
n
a
n u n
z
a
az
a z
z
n u n
z
z
z
Bila ( ) - 1 maka : . = . = . 1 1 1 1 Contoh: 1 1 x x x n X z Rx z Rx k k n n x n a x n z x k z x k z n k k x n X z z R R u n z
1 1 maka 1 1 z u n z z
Bila ( ) - ( ) 1 -1 -1 maka : = . = - . . . - . . ( ) sehingga : C x n X z Rx z Rx dX z d n n n x n z x n nz z n x n z z TZ n x n dz dz n n n dX z nx n z Rx z Rx dz
1 1 ontoh: maka 1 2 1 1 1 1 1Bila 1 maka 1 maka 1
az n n a u n z a na u n z a az az z a u n z nu n z
4.4.4 Pembalikan waktu
( )
-
Bila
dan
( )
-
( )
=
.
=
x n
X z
R
x
z
R
x
y n
x k h n k
h n
H z
R
h
z
R
h
k
n
n
Y z
x k h n k
z
x k
h n k
z
n
k
k
n
x k
k
.
.
.
( ). ( )
maka :
( ). ( )
Daerah konvergensinya adalah interseksi antara
-
dan
-
Contoh :
l k
k
l
h l z
x k z
h l z
X z H z
l
k
l
x n
h n
X z H z
R
x
z
R
x
R
h
z
R
h
4.4.6 Penjumlahan Konvolusi
( ) - Bila . dan ( ) - 1 1 - ( ) . = . . . 2 - 1 = . 2 x n X z Rx z Rx y n x n w n w n W z Rw z Rw n n n Y z x n w n z X v v dv w n z j n n C n z X v w n v j n
1 1 1 . - -2 1 1 Jadi : . ( ) - -2C adalah lintasan tertutup yang melingkari titik 0 dan lintasan terletak dalam da z v dv X v W v dv Rx Rw z Rx Rw v j C C z y n x n w n Y z X v W v dv Rx Rw z Rx Rw v j C
erah konvergen 1untuk kedua dan
1 1
Atau : . ( ) -
-2
C adalah lintasan tertutup yang melingkari titik 0 dan lintasan terletak dalam daerah konvergen untuk ked X v W v z y n w n x n Y z W v X v dv Rx Rw z Rx Rw v j C
1 ua W v dan X
1
Bila dan maka ( ) . . adalah konvolusi periodik 2
Bila dan w deretan kompleks, maka integral konvolusi kompleks :
1 1 . ( ) 2 j j j j j v e z e Y e X e W e d x n n z y n x n w n Y z X v W v dv j v C
- -1 Contoh : 1 1 1 1 1 1 1 . ( ) - -2 Rx Rw z Rx Rw n x n a u n X z z a az n w n b u n W z z b bz z y n w n x n Y z X W v v dv Rx Rw z Rx Rw v j C n y n ab
/ 1 1 1 1 1 1 ( ) 1 1 2 1 . 1 . 2 / .C adalah lintasan tertutup yang melingkari titik 0 dan lintasan terletak dalam daerah konvergen 1
untuk kedua dan . Pole terletak di z a u n Y z v dv dv j a z v b v j v z a v b C C W v X v v
z dan , daerah konvergensi adalah z , maka daerah konvergensi adalah ,v sehingga pole diluar lintasan integrasi C. Dengan teorema residu Cauchy untuk menghitung
z z b v X z a X a a v z v Y z
1 1 2 2 ( ) 1 1-Bila 1 dan 2 deretan kompleks dan
( ) 2 2 -1 * 1 1 maka 1 2 1 2 2
n=-Lintasan integrasi harus berada di d
x n X z Rx z Rx x n x n x n W z Rx z Rx x n x n X v X v dv j v C
alam daerah konvergensi 1 dan 2 . Bila 1 dan 2 konvergen di lingkaran satuan, dipilih , maka
1 * ( ). ( ) 1 2 1 2 2 n=- -1 2 1 1 Bila 1 = 2 = maka = 1 2 2 -X z X z j X z X z v e j j x n x n X e X e d x n x n x n x n X v X v dv v j n C
- C adalah lintasan tertutup di dalam daerah konvergensi .2 1 2 Bila maka = ( ) 2 - -Rx z Rx X z j j v e x n X e d n
4.4.8 Teorema Parseval
1
2
Bila
deretan kausal:
( )
0
1
2
....
0
maka: 0
lim
( )
n
x n
x n
X z
x n z
x
x
z
x
z
n
x
X z
z
Bila
( ) dan semua pole ( )berada di dalam lingkaran satuan
1
1
maka: lim
lim
1
x n
X z
X z
z
x n
X z
4.4.9 Teorema Nilai Awal
1
All z
1
| | 1
1
1
1
1
| | 1
1
1
1
| | |
|
1
1
1
1
| | |
|
1
1
untuk seluruh harga z kecuali 0 untuk m
0
atau untuk m
0
n
u n
z
z
u
n
z
z
n u n
z
z
n u n
z
z
m
n m
z
4.4.11 Pasangan Transformasi z
n
u
n
r
sin
z
|
z
|
r
sin
r
r
|
z
|
z
r
z
n
cos
r
2
1
z
cos
r
1
n
u
n
cos
r
1
|
z
|
z
z
n
cos
2
1
z
sin
n
u
n
n
sin
1
|
z
|
z
z
n
cos
2
1
z
cos
1
n
u
n
cos
|
|
|
z
|
z
1
z
1
n
u
n
|
|
|
z
|
z
1
z
n
u
n
1 0 n 2 2 1 0 1 0 0 n 2 1 0 1 0 0 2 1 0 1 0 0 2 1 1 n 2 1 1 n
4.4.11 Pasangan Transformasi z
Polinomial rasional dari H(z) :
0
1
1
1
(
1)
1
(
1)
0
1
1
M
M
M
M
N
N
N
N
Y z
b
b z
b
z
b z
H z
X z
a
a z
a
z
a z
0
1
1
0
1
1 1 11
1
M M M k k k N N N k k kb
z z
b z
z z
H z
z
z
p
p z
z
kadalah akar-akar pembilang dari H(z)
H(z)= 0
z
kadalah zero dari H(z)
p
kadalah akar-akar penyebut dari H(z)
4.5 Transformasi Z dalam bentuk polinomial rasional
Sistem LTI
h[n]
x(n)
y(n)=x(n)*h(n)
X(z) Y(z) = X(z) H(z)
2
1
( )
( )
( )
( )
N
n
n N
Y z
H z
X z
H z
h n z
4.6 Fungsi Sistem atau Fungsi Transfer H(z) dari Sistem Linier
Tidak Berubah terhadap waktu
0 0 0 1 2 1 1 2 0 1 1 2 0 1 2 1 2 1 2a
1
( )
( )
( ) ...
( )
( )
( ) ...
( )
...
( )
( )
( )
1
...
N M k k k k N M N M M M N Na y n k
b x n k
Y z
a z Y z
a z Y z
a z Y z
b X z
b z X z
b z
X z
b
b z
b z
b z
Y z
H z
X z
a z
a z
a z
4.7 Fungsi Sistem untuk Sistem yang Dinyatakan dalam
Persamaan Perbedaan Koefisien Konstan Linier
0 1 2Contoh:
Filter FIR yang direalisasikan secara non rekursif
,
Respon impuls
sistem ini
1 0
atau h n
1
2
...
( ) 1
...
M k M
y n
x n k
h n
h n
n
M
n
n
n
n M
h n
H z
z
z
z
-1 1 1 -1Filter FIR yang direalisasikan secara rekursif
1
1
Y(z)
Y(z)z
( )
( )
( )
1
( )
( )
1-z
1
M My n
y n
x n
x n M
X z
X z z
Y z
z
H z
X z
h n
u n
u n M
Edisi Semester I 17 / 18 EYH 34
Sistem LTI Kausal
Sistem LTI adalah kausal jika:
0
0
ROC transformasi Z dari sistem LTI kausal adalah bagian luar
dari lingkaran berjari-jari
Sistem LTI Stabil
ROC transformasi z dari
h n
n
r
deretan
adalah harga-harga
yang menyebabkan
(absolutely summable).
Sehingga bila ROC mencakup lingkaran satuan yaitu
1 , maka
, artinya sistem LTI tersebut akan s
n n n
h n
z
r
h n r
z
h n
tabil .
Sistem LTI Kausal akan stabil jika dan hanya jika
seluruh pole ( ) terletak didalam lingkaran satuan.
Daerah konvergensi sistem LTI yang kausal dan stabil
H z
4.8 Kausalitas dan Stabilitas Sistem Linier Tidak Berubah
Terhadap
Sistem LTI Kausal
Sistem LTI adalah kausal jika:
0
0
ROC transformasi Z dari sistem LTI kausal adalah bagian luar
dari lingkaran berjari-jari
Sistem LTI Stabil
ROC transformasi z dari
h n
n
r
deretan
adalah harga-harga
yang menyebabkan
(absolutely summable).
Sehingga bila ROC mencakup lingkaran satuan yaitu
1 , maka
, artinya sistem LTI tersebut akan s
n n n
h n
z
r
h n r
z
h n
tabil .
Sistem LTI Kausal akan stabil jika dan hanya jika
seluruh pole ( ) terletak didalam lingkaran satuan.
Daerah konvergensi sistem LTI yang kausal dan stabil
H z
4.8 Kausalitas dan Stabilitas Sistem Linier Tidak Berubah
Terhadap
Ada 3 pendekatan untuk menghitung transformasi z invers :
– Transformasi z invers
– Power series in z (long division)
– Fraksi pecahan parsial
Transformasi dari ( ) 1Kedua sisi persamaan diatas dikalikan dengan faktor dan diintegrasikan pada lintasan tertutup dalam ROC ,sehingga diperoleh
1 1 . .= . z x k k X z x k z k n z X z n k n X z z dz x k z d k C
dimana C adalah lintasan tertutup yang berputar berlawanan arah jarum jam dalam ROC .
1 1
. .= . .
Dengan menggunakan teorema integral Cauchy, 1 1 2 z C X z n n k X z z dz x k z dz k C C n k z d j
1, = 0,maka persamaan sebelumnya dapat dituliskan 1 . .= 2 k n z k n C n X z z dz x n j
4.9.1 Transformasi z Invers
Teorema integral Cauchy
Bila adalah lintasan tertutup dan '
ada pada lintasan atau di dalam ,
,
di dalam
0
0
1
=
2
0
0,
0
di luar
Untuk pole yang
C
f
z
C
C
f z
f z
z
C
dz
j
z
z
z
C
C
k
0sama yang terdapat dalam , '
dengan turunan orde
1, dan
yang tidak mempunyai pole dalam , maka
1
1
,
0
di dalam
1
1
=
1 !
2
0
0,
C f
z
k
f z
C
k
d
f z
f z
z
C
k
dz
k
dz
z z
j
k
z
z
C
i0
di luar
Bila terdapat pole dan
tidak mempunyai pole dalam , maka
1
=
lim
2
1
2
...
1
...
1
2
z
C
n
f z
C
n
f z
dz
z
zi
z
j
z
z
z
z
z
z
n
z
z
i
C
f z
z
z
z
z
z
z
zn
Contoh
Tentukan transformasi z invers untuk ( ) berikut
,
Solusi
Untuk
0
1
1
.
1
.
,
0
2
2
Untuk
0
1
1
1
1
1
1
1
1
1
.
.
0
2
2
0
1
2
X z
z
X z
z
a
z a
n
n
z
n
z
n
x n
z
dz
dz
a
n
j
z a
j
z a
C
C
n
z
x
dz
dz
j
z a
j
z z a
z a
z
z
z a
a
a
C
C
x
2
1
1
1
1
1
1
.
.
0
2
2
2
2
2
2
0
0,
0
z
d
dz
dz
j
z a
j
z
z a
dz z a
z
a
a
z
z a
C
C
x n
n
X(z) dinyatakan dalam bentuk X(z) = a + bz
-1+ cz
-2...
Umumnya X(z) adalah deretan sisi kanan dan berbentuk
polinomial rasional
Jika X(z) berbentuk ponomial rasional, ekspansi dilakukan dengan
pembagian cara panjang (long division).
( )
n
X z
x n z
n
( )
( )
P z
X z
Q z
1
Contoh :
1
2
1 1.5
0.5
(a) ROC:
1
(b) ROC:
0.5
Solusi
(a)Karena ROC adalah bagian luar lingkaran,maka
kausal.
1
2
Ekspansi deret dalam bentuk
,
,...dst.
H z
z
z
z
z
x n
z
z
1 2 3 1 1.5 1.75 1.875 ... 1 2 1 1.5 0.5 1 1 2 1 1.5 0.5 1 2 1.5 0.5 1 2 3 1.5 2.25 0.75 2 3 1.75 0.75 z z z z z z z z z z z z z z
2 3 1.75 2.625 3 1.875 1,1.5,1.75,1.875,... z z z x n
(b) Karena ROC adalah bagian dalam lingkaran,maka anti kausal. 2
Ekspansi deret dalam bentuk , ,...dst. 2 3 2 6 14 2 1 0.5 1.5 1 1 2 1 3 2 2 3 2 2 3 3 9 6 2 3 7 6 x n z z z z z z z z z z z z z z z z
4 ... x n ...14, 6, 2, 0, 0
1 ( 1) 0 1 1 1 ( 1) 0 1 1Polinomial rasional ( )
Fungsi rasional diatas dikatakan proper jika
0 dan
.
Fungsi rasional improper
dapat dituliskan sebagai
M M M M N N N N N
X z
N z
b
b z
b
z
b z
X z
D z
a
a z
a
z
a z
a
M
N
M
N
1 ( ) 1
0 1penjumlahan
polinomial dan fungsi rasional proper.
Ekspansi pecahan parsial dilakukan pada fungsi rasional proper.
M N M N
N z
N z
X z
c
c z
c
z
D z
D z
3 1 2 1 2 3 1 NUntuk polinomial rasional ( ) dengan pole yang berbeda maka bentuk ekspansinya menjadi
...
Nilai koefisien ,...,
ditentukan sebagai berikut
N N k k z p
X z
N
X z
A
A
A
A
z
z
p
z
p
z
p
z
p
A
A
z
p
X z
A
z
2 2 1 2 1 2 0.2 0.6 0.61, 2,...,
Contoh
Tentukan ekspansi pecahan parsial dari
berikut
2
0.4
0.12
2
0.6
0.2
0.6
0.2
2
2
0.6
1.75,
2.75
0.6
0.2
k z z zk
N
X z
z
z
X z
z
z
z
X z
z
A
A
z
z
z
z
z
X z
z
z
A
z
A
z
z
z
1k 2k
2
Untuk polinomial rasional ( ) dengan pole yang sama yaitu
, maka
ekspansi pecahan parsial menjadi
...
Nilai koefisien
ditentukan sebagai berikut
1
!
l k lk l k k k jk jkX z
l
z
p
A
A
A
z
p
z
p
z
p
A
d
A
l
j
( )
1, 2,...,
j l j l k l j z pX z
z
p
j
l
dz
z
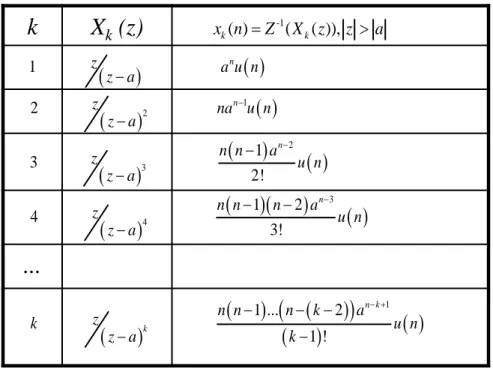
-1 ( ) ( ( )), k k x n Z X z z a
k
X
k(z)
...
Tabel Invers Transformasi untuk Metoda Ekspansi Pecahan Parsial 1 2 2 3 3 4 1 2 1 3 2! 1 2 4 3! n n n n k z a u n z a z na u n z a n n a z u n z a n n n a z u n z a z k z a
1 1 ... 2 1 ! n k n n n k a u n k 4.9.3.2 Pole yang sama
2 1 2 3 1 1 2 4 31 11 21 4 3 1 2 3 1 1 1 1 1 2 4 2 4 2 2 11Contoh
Tentukan invers transformasi z dari
,
Solusi
1
1
( )
1, 2,...,
!
1
3
j l j l jk l j k z pz
z
X z
z
z
z
X z
z
A
A
A
A
z
z
z
z
z
z
z
d
X z
A
z
p
j
N
l
j
dz
z
A
1 2 1 1 1 2 4 2 2 3 1 2 3 2 1 1 2 4 21 1 31 1 4 3 1 4 4 2 2 3 1 2 3 1 1 1 1 11
80
1 !
1
1
1
1
-20 ,
=6,
= - 80
3 2 !
80
20
6
80
z z z zd
z
z
dz
z
z
d
z
z
z
A
A
A
dz
z
z
z
z
z
z
z
z
z
X z
z
z
z
z
z
z
Fungsi respon frekuensi memberikan informasi tentang
karakteristik filter dijital LTI dalam domain frekuensi .
Dengan fungsi kompleks variabel frekuensi
, realiasasi dan
manipulasi filter dijital akan sulit.
Akan tetapi dengan menggunakan transformasi z dari
respon impuls sistem LTI, yang disebut fungsi sistem/fungsi
transfer (H(z)), dimana polinomial dinyatakan dalam z
-1, dan
untuk sistem dengan respon impuls real, koefisien dari
polinomial fungsi sistem nya juga akan real. Hal ini akan
memudahkan dalam sintesa dan realisasi filter dijital.
1 2 ... ( ) 0 1 2 ( ) 1 2 ( ) 1 ... 1 2Polinomial pembilang dan penyebut difaktorkan : 1 1 1 ( ) 0 1 1 1
Karena TFWD adalah evaluasi pada bid-z dimana maka
M b b z b z b z Y z M H z N X z a z a z a z N M z zk k H z b N p zk k j z e H e