MODEL MATEMATIKA SISTEM MEKANIKA Dosen : Nurlita Gamayanti, ST
PENGANTAR
Pada bagian ini akan dibahas mengenai pembuatan model matematika dari sistem mekanika baik dalam bentuk persamaan differensial, fungsi alih maupun diagram blok. Pergerakan dari elemen sistem mekanika dapat dideskripsikan dalam beberapa dimensi yaitu translasi, rotasi atau kombinasi antara translasi dan rotasi. Persamaan gerakan pada sistem mekanika diperoleh berdasarkan Hukum Newton
MODEL MATEMATIKA SISTEM MEKANIKA 1. Gerakan Translasi
Gerakan translasi didefinisikan sebagai suatu gerakan yang terjadi di sepanjang garis lurus. Variabel yang digunakan untuk mendeskripsikan gerakan translasi adalah percepatan, kecepatan dan perpindahan. Hukum dasar yang mengatur gerakan translasi dari elemen sistem mekanika adalah Hukum kedua Newton.
Hukum kedua Newton untuk gerakan translasi menyatakan bahwa jumlah gaya yang bekerja pada suatu benda dalam arah tertentu sama dengan hasil kali massa benda tersebut dengan percepatannya dalam arah yang sama atau dinyatakan dalam persamaan:
∑ =F m.a
Dimana F menyatakan gaya yang bekerja pada benda, m menyatakan massa benda dan a menyatakan percepatan benda
Satuan untuk gaya, massa dan percepatan diberikan sebagai berikut :
Satuan Massa Percepatan Gaya
MKS kg m/det2 N
CGS gram cm/det2 dyne
Berikut ini kita akan menurunkan model matematika dari elemen sistem mekanika yang mengalami gerakan translasi, yaitu :
1. Massa
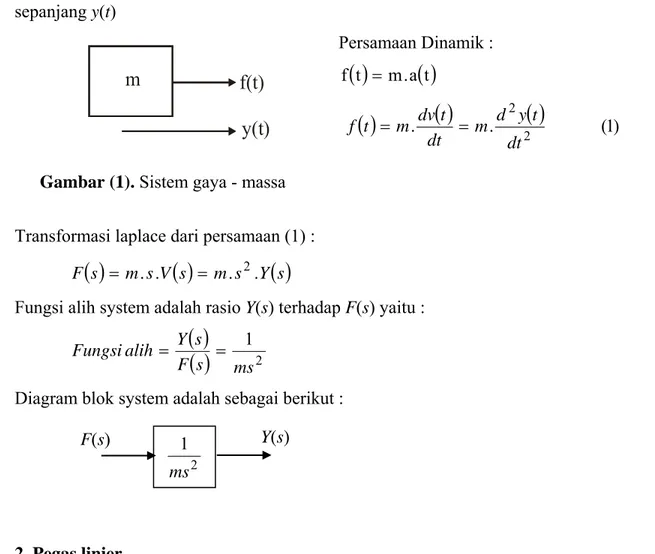
Suatu benda dengan massa m ditarik oleh gaya f(t) sehingga megalami perpindahan sepanjang y(t) Persamaan Dinamik :
( )
t m.a( )
t f =( )
.( )
. 2( )
(1) 2 dt t y d m dt t dv m t f = =Transformasi laplace dari persamaan (1) :
( )
s m s V( )
s m s Y( )
sF = . . = . 2.
Fungsi alih system adalah rasio Y(s) terhadap F(s) yaitu :
( )
( )
2 1 ms s F s Y alih Fungsi = =Diagram blok system adalah sebagai berikut :
2. Pegas linier
Suatu pegas ditarik oleh gaya f(t) sehingga pertambahan panjang sepanjang y(t)
Jika K adalah konstanta pegas dan T adalah tegangan pegas maka persamaan dinamik sistem adalah : Persamaan dinamik : ) ( . ) (t T K y t f = = (2) 2 1 ms Y(s) F(s)
m
f(t)
y(t)
Gambar (1). Sistem gaya - massa
f(t)
y(t)
) ( . ) ( ) (s T s K Y s F = =
Fungsi alih sistem adalah rasio Y(s) terhadap T(s) yaitu :
( )
( )
s K T s Y alih Fungsi = = 1Diagram blok system adalah sebagai berikut :
3. Gesekan viskos
Suatu gesekan viskos yang mempunyai koefisien gesekan viskos B ditarik oleh gaya f(t) hingga bergeser sejauh y(t).
Persamaan dinamik : ) 3 ( ) ( . ) ( dt t dy B t f =
Transformasi laplace dari persamaan (3) : ) ( . . ) (s B s Y s F =
Fungsi alih sistem adalah rasio Y(s) terhadap F(s) yaitu :
( )
( )
s Bs F s Y alih Fungsi = = 1Diagram blok system adalah sebagai berikut : K 1 Y(s) T(s) Bs 1 Y(s) F(s)
B
f(t)
y(t)
2. Gerakan Rotasi
Gerakan rotasi didefinisikan sebagai suatu gerakan terhadap sumbu tertentu. Variabel yang umum digunakan untuk mendeskripsikan gerakan rotasi adalah torsi T, kecepatan sudut ω, dan perpindahan sudut θ.
Pengembangan hukum kedua Newton untuk gerakan rotasi menyatakan bahwa jumlah momen atau torsi terhadap sumbu tertentu sama dengan hasil kali inersia dengan percepatan sudut atau dinyatakan dalam persamaan :
α . J T =
∑
dimana T menyatakan torsi , J menyatakan inersia dan α menyatakan percapatan sudut. Satuan untuk torsi, inersia dan percepatan sudut diberikan sebagai berikut :
Satuan Inersia Percepatan sudut Torsi
MKS kg.m2 rad/det2 N.m
CGS Gram.cm2 rad/s2 Dyne.cm
Berikut ini kita akan menurunkan model matematika dari elemen sistem mekanika yang mengalami gerakan rotasi, yaitu :
1. Inersia
Suatu benda dengan inersia J dikenakan torsi sebesar T(t) sehingga berputar dengan kecepatan sudut ω(t) Persamaan dinamik : T
( )
t = J.α( )
t( )
. ω( )
(4) dt t d J t T =dimana α(t) menyatakan percepatan sudut Transformasi laplace dari persamaan (4) :
( )
s J ..s.ω(s)T =
Fungsi alih system adalah rasio ω(s) terhadap T(s) yaitu :
w
T
( )
( )
s Js T s alih Fungsi = ω = 1Diagram blok sistem adalah sebagai berikut :
2. Pegas torsi
Suatu batang atau poros dengan konstanta pegas torsi K dikenakan torsi sebesar T(t) sehingga mengalami perpindahan sudut θ(t)..
Persamaan dinamik :
T
( )
t = K. tθ( )
(5)Transformasi Laplace dari persamaan (5) :
( )
s K( )
sT = .Θ
Fungsi alih sistem adalah rasio Θ
( )
s terhadap T(s) yaitu :( )
( )
s K T s alih Fungsi = Θ = 1Diagram blok system adalah sebagai berikut :
3. Gesekan viskos
Suatu gesekan viskos yang mempunyai koefisien gesekan viskos B dikenakan torsi sebesar T(t) sehingga mengalamio perpindahan sudut θ(t).
Js 1 ω
( )
s T(s) K 1 Θ( )
s T(s)Gambar (5). Sistem torsi – pegas torsi
K T
Persamaan dinamik :
( )
. θ( )
(6) dt t d B t T =Transformasi Laplace dari persamaan (6) :
( )
s B s( )
sT = . .Θ
Fungsi alih sistem adalah rasio Ө(s) terhadap T(s) yaitu :
( )
( )
s Bs T s alih Fungsi = Θ = 1Diagram blok system adalah sebagai berikut :
4. Roda gigi
Rangkaian roda gigi terdiri dari dua buah roda gigi yaitu roda gigi 1 dan roda gigi 2 dikopel bersama-sama dengan asumsi inersia dan gesekan viskos roda gigi diabaikan, dapat dilihat seperti gambar berikut :
Bs
1 Θ
( )
s T(s)Gambar (6). Sistem gaya - gesekan viskos B T θ N1 N2 T1 2 2,ω θ T2 1 1,ω θ
Jumlah gigi pada roda gigi 1 dan 2 masing-masing adalah N1 dan N2. Jari-jari roda gigi 1 dan 2 masing-masing adalah r1 dan r2 Perpindahan sudut dan kecepatan sudut dari roda gigi 1 dan 2 masing-masing adalah θ1, ω1 dan θ2, ω2.Torsi pada roda gigi 1 dan 2 masing-masing adalah T1 dan T2.
Hubungan antara T1 dengan T2, θ1 dengan θ2, ω1 dengan ω2, r1 dengan r2, serta N1 dengan N2 adalah sebagai berikut :
2 1 1 2 2 1 1 2 2 1 ω ω θ θ r r N N T T = = = = (7)
Dalam prakteknya, inersia dan gesekan viskos pada masing-masing roda gigi sering tidak dapat diabaikan. Representasi ekivalen dari roda gigi dengan inersia dan gesekan viskosnya dapat dilihat seperti gambar berikut :
T adalah torsi masukan yang dikenakan pada sisi roda gigi 1, T1 dan T2 masing-masing adalah torsi yang ditransmisikan ke roda gigi 1 dan roda gigi 2, B1 dan B2 masing-masing adalah koefisien gesekan viskos roda gigi 1 dan roda gigi 2 sedangkan J1 dan J2 masing-masing adalah inersia roda gigi 1 dan roda gigi 2.
Persamaan torsi untuk roda gigi 2 adalah
( )
( )
( )
dt t d B dt t d J t T 22 2 2 2 2 2 θ θ + = (8)Persamaan torsi untuk roda gigi 1 adalah N1 N2 T1 T2 B1 B2 2 θ T, 1 θ J1 J2
( )
( )
( )
( )
dt t d B N N dt t d J N N t T N N t T 2 1 2 2 1 2 1 2 2 2 2 1 2 2 1 1 θ θ ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = = (9)Persamaan torsi masukan pada sisi roda gigi 1 adalah
( )
( )
( )
T( )
t dt t d B dt t d J t T 12 1 1 1 2 1 θ + θ + =Dengan mensubstitusikan nilai T1(t) ke persamaan T maka persamaan torsi pada sisi roda gigi 1 menjadi
( )
( )
( )
dt t d B dt t d J t T e 12 1e 1 2 1 θ + θ = (10)Dimana J1e dan B1e masing-masing adalah inersia ekivalen dan koefisien gesekan viskos ekivalen dari rangkaian roda gigi mengacu pada poros roda gigi 1, yang besarnya adalah
2 2 2 1 1 1 2 2 2 1 1 1 B N N B B dan J N N J J e e ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + =
Transformasi Laplace dari persamaan (11) :
( )
s J s( )
s B s( )
s T = 1e 2Θ1 + 1e Θ1Jika T(t) dan θ1(t) masing-masing merupakan masukan dan keluaran untuk sistem rangkaian roda gigi, maka fungsi alih dari sistem rangkaian roda gigi adalah
( )
( )
s J s B s T s e e 1 2 1 1 + = ΘDiagram blok sistem adalah sebagai berikut :
Contoh :
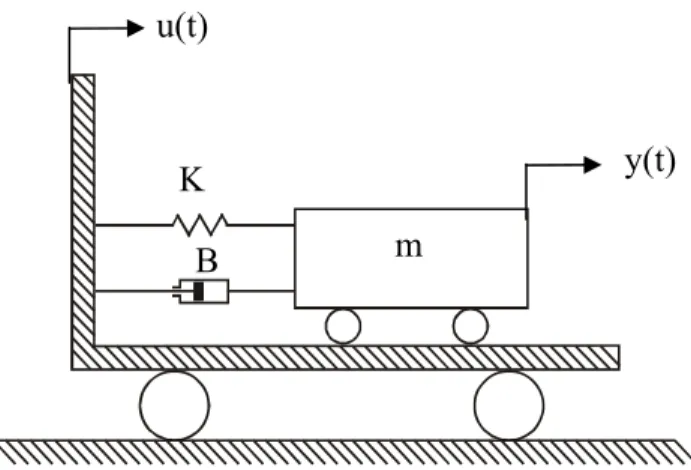
1. Sistem dashpot-massa-pegas yang dipasang pada kereta, dimana kereta dianggap dalam kedaan diam pada t < 0. u(t) adalah perpindahan kereta dan merupakan masukan ke sistem. Di t = 0 kereta digerakkan dengan kecepatan tetap. Perpindahan y(t) dari massa adalah
s B s J1e 2 1e 1 +
( )
s Θ T(s)Model matematika dari sistem dashpot-massa-pegas dapat diturunkan sebagai berikut : Hukum kedua Newton :
∑ =F m.a
( )
( )
(
( ) ( )
)
( )
2 2 dt t y d m t u t y K dt t du dt t dy B ⎟ − − = ⎠ ⎞ ⎜ ⎝ ⎛ − −( )
( )
( )
( )
( )
( . ) 2 2 al Differensi Pers t u K dt t du B t y K dt t dy B dt t y d m + + = + Transformasi lapacenya :(
ms2+Bs+K)
Y( ) (
s = Bs + K) ( )
UsFungsi alih sistem adalah rasio Y(s) terhadap U(s) yaitu :
( )
( )
ms Bs K K Bs s U s Y 2+ + + =Diagram blok dari system adalah sebagai berikut :
LATIHAN
1. Suatu sistem terdiri dari inersia beban dan gesekan viskos. T(t) adalah torsi yang bekerja pada sistem dan merupakan masukan ke sistem. Sistem berputar dengan kecepatan sudut
u(t) K B m y(t) K Bs ms K Bs 2+ + + Y(s) U(s)
ω(t) dan merupakan keluaran sistem. Dapatkan model matematika dari sistem ini dalam bentuk fungsi alih.
Dimana,
J = momen inersi beban B = koefisien gesekan viskos