Desain PID Controller dengan Matlab
Sistem Kontrol PID ( Proportional–Integral–Derivative controller ) merupakan kontroler untuk menentukan presisi suatu sistem instrumentasi dengan karakteristik adanya umpan balik pada sistem tesebut ( Feed back ).
Sistem kontrol PID terdiri dari tiga buah cara pengaturan yaitu kontrol P (Proportional), D (Derivative) dan I (Integral), dengan masing-masing memiliki kelebihan dan kekurangan. Dalam implementasinya masing-masing cara dapat bekerja sendiri maupun gabungan diantaranya. Dalam perancangan sistem kontrol PID yang perlu dilakukan adalah mengatur parameter P, I atau D agar tanggapan sinyal keluaran system terhadap masukan tertentu sebagaimana yang diinginkan.
1. Kontrol Proporsional Kontrol P jika G(s) = kp, dengan k adalah konstanta. Jika u = G(s) • e maka u = Kp • e dengan Kp adalah Konstanta Proporsional. Kp berlaku sebagai Gain (penguat) saja tanpa memberikan efek dinamik kepada kinerja kontroler. Penggunaan kontrol P memiliki berbagai keterbatasan karena sifat kontrol yang tidak dinamik ini. Walaupun demikian dalam aplikasi-aplikasi dasar yang sederhana kontrol P ini cukup mampu untuk memperbaiki respon transien khususnya rise time dan settling time.
Kd.[deltae / deltat] Jika e(T) mendekati konstan (bukan nol) maka u(t) akan menjadi sangat besar sehingga diharapkan dapat memperbaiki error. Jika e(T) mendekati nol maka efek kontrol I ini semakin kecil. Kontrol I dapat memperbaiki sekaligus menghilangkan respon steady-state, namun pemilihan Ki yang tidak tepat dapat menyebabkan respon transien yang tinggi sehingga dapat menyebabkan ketidakstabilan sistem. Pemilihan Ki yang sangat tinggi justru dapat menyebabkan output berosilasi karena menambah orde sistem.
3. Kontrol Derivatif Sinyal kontrol u yang dihasilkan oleh kontrol D dapat dinyatakan sebagai G(s) = s.Kd Dari persamaan di atas, nampak bahwa sifat dari kontrol D ini dalam konteks "kecepatan" atau rate dari error. Dengan sifat ini ia dapat digunakan untuk memperbaiki respon transien dengan memprediksi error yang akan terjadi. Kontrol Derivative hanya berubah saat ada perubahan error sehingga saat error statis kontrol ini tidak akan bereaksi, hal ini pula yang menyebabkan kontroler Derivative tidak dapat dipakai sendiri.
Untuk mendapatkan aksi kontrol yang baik diperlukan langkah coba-coba dengan kombinasi antara P, I dan D sampai ditemukan nilai Kp, Ki dan Kd seperti yang diiginkan.
1. Memahami cara kerja system
2. Mencari model sistem dinamik dalam persamaan differensial 3. Mendapatkan fungsi alih sistem dengan Transformasi Laplace
4. Memberikan aksi pengontrolan dengan menentukan konstanta Kp, Ki dan Kd
5. Menggabungkan fungsi alih yang sudah didapatkan dengan jenis aksi pengontrolan
6. Menguji sistem dengan sinyal masukan fungsi langkah, fungsi undak dan impuls ke dalam fungsi alih yang baru
7. Melakukan Transformasi Laplace balik untuk mendapatkan fungsi dalam kawasan waktu
Respon sistem atau tanggapan sistem adalah perubahan perilaku output terhadap perubahan sinyal input. Respon sistem berupa kurva ini akan menjadi dasar untuk menganalisa karakteristik system selain menggunakan persamaan/model matematika. Bentuk kurva respon sistem dapat dilihat setelah mendapatkan sinyal input. Sinyal input yang diberikan untuk mengetahui karakteristis system disebut sinyal test. Ada 3 tipe input sinyal test yang digunakan untuk menganalisa system dari bentuk kurva response:
1. Impulse signal, sinyal kejut sesaat
2. Step signal, sinyal input tetap DC secara mendadak
3. Ramp signal, sinyal yang berubah mendadak (sin, cos).
Respon Peralihan (transient response) Ketika input sebuah sistem berubah secara tiba-tiba, keluaran atau output membutuhkan waktu untuk merespon perubahan itu. Bentuk respon transient atau peralihan bisa digambarkan seperti berikut:
1. Underdamped response, output melesat naik untuk mencapai input kemudian turun dari nilai yang kemudian berhenti pada kisaran nilai input. Respon ini memiliki efek osilasi
2. Critically damped response, output tidak melewati nilai input tapi butuh waktu lama untuk mencapai target akhirnya.
3. Overdamped response, respon yang dapat mencapai nilai input dengan cepat dan tidak melewati batas input.
Fasa peralihan ini kemudian akan berhenti pada nilai dikisaran input/target dimana selisih nilai akhir dengan target disebut steady state error.Jika dengan input atau gangguan yang diberikan pada fasa transient kemudian tercapai output steady state maka dikatakan sistem ini stabil. Jika sistem tidak stabil, output akan meningkat terus tanpa batas sampai sistem merusak diri sendiri atau terdapat rangkaian pengaman yang memutus sistem.
Sensitifitas sistem adalah perbandingan antara persentase perubahan output dengan persentase perubahan input. Perubahan pada input bisa normal atau ada gangguan dimana parameter proses akan berubah seiring dengan usia, lingkungan, kesalahan kalibrasi dsb. Pada sistem siklus tertutup tidak terlalu sensitif terhadap hal ini karena adanya proses monitoring balik/feedback. Kondisi sebaliknya terjadi pada sistem siklus terbuka. Pemilihan sistem siklus terbuka harus memperhatikan spesifikasi beban dan kapasitas sistem.
Klasifikasi Respon Sistem Berdasarkan sinyal bentuk sinyal uji yang digunakan, karakteristik respon sistem dapat diklasifikasikan atas dua macam, yaitu:
a. Karakteristik Respon Waktu (Time Respons), adalah karakteristik respon yang spesifikasi performansinya didasarkan pada pengamatan bentuk respon output sistem terhadap berubahnya waktu. Secara umum spesifikasi performansi respon waktu dapat dibagi atas dua tahapan pengamatan, yaitu;
input/gangguan/beban sampai respon masuk dalam keadaan steady state. Tolak ukur yang digunakan untuk mengukur kualitas respon transient ini antara lain; rise time, delay time, peak time, settling time, dan %overshoot. Spesifikasi Respon Steady State, adalah spesifikasi
respon sistem yang diamati mulai saat respon masuk dalam keadaan steady state sampai waktu tak terbatas (dalam praktek waktu pengamatan dilakukan saat TS t 5TS). Tolok ukur yang digunakan untuk mengukur kualitas respon steady state ini antara lain; %eror steady state baik untuk eror posisi, eror kecepatan maupun eror percepatan
b. Karakteristik Respon Frekuensi (Frequency Respons) karakter resppon frekuensi adalah karakteristik respon yang spesifikasi performansinya didasarkan pengamatan magnitude dan sudut fase dari penguatan/gain (output/input) sistem untuk masukan sinyal sinus (A sin t). Tolak ukur yang digunakan untuk mengukur kualitas respon frekuensi ini antara lain;
Frequency Gain Cross Over,
demikian dapatlah dipandang sebagai sistem orde I atau II, sehingga ukuran kualitas sistem dapat diukur dengan tolok ukur yang ada.
Absolut Optical Encoder
Absolute optical encoder adalah suatu alat yang mengkonversi gerakan linier atau rotasi ke dalam suatu urutan pulsa digital. Encoder digunakan untuk merasakan posisi, percepatan dan akselerasi. Prinsip optical memberikan ketahanan terhadap gangguan elektris dan magnetis, yang memberikan keuntungan untuk menempatkan encoder tersebut sebagai sensor umpan balik secara langsung dekat dengan alat penggerak. Biasanya, mereka dipilih sebagai sensor umpan balik untuk sistem servo yang menuntut untuk ketelitian tingkat tinggi, tetapi absolut optical encoder juga dapat digunakan sebagai sensor untuk aplikasi biaya yang sangat rendah.
Optical Rotary Encoder menghasilkan data posisi sudut secara langsung dalam bentuk digital. Ada dua tipe dari optical rotary encoder, yaitu Incremental dan Absolute Shaft Encoder. Incremental Shaft Encoder adalah encoder yang outputnya berupa pulsa untuk setiap perubahan putaran, sedangkan pada Absolute Shaft Encoder memungkinkan kita menentukan posisi sebenarnya dari shaft setiap waktu.
Kelebihan absolute encoder dibandingkan incremental encoder adalah kemampuan dalam menentukan posisi absolut.
Absolut Optical Encoder menggunakan sebuah glass disk yang diberi tanda dengan suatu pola track/jalur yang konsentris (terpusat). Pancaran cahaya yang terpisah dikirimkan melalui setiap track ke masing-masing photosensor. Setiap photosensor menghasilkan 1 bit pada output digital.
Dengan demikian, satu bagian dapat mempunyai sudut sebesar α, dimana besarnya adalah :
α =360
o
n
Dimana n = Jumlah angka desimal yang dihasilkan.
Dengan menggunakan beberapa pasang fotodioda dan led, maka dapat dibaca posisi sudut dengan ketelitian sebesar α.
Keuntungan encoder tipe ini adalah outputnya dalam bentuk digital dan selalu memberikan posisi absolut. Ini berbeda dengan Incremental Encoder yang hanya memberikan posisi relatif. Kelemahan Absolut Optical Encoder adalah harganya yang relatif mahal karena membutuhkan banyak photocells dan kelurusan dalam penyusunannya harus tepat. Jika tidak, encoder tersebut sekali-kali akan menghasilkan data yang salah.
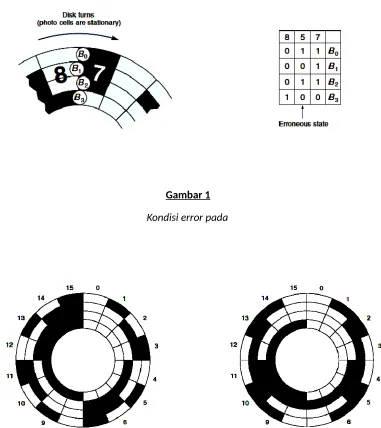
Gambar 1
Kondisi error pada
Gambar 1 dapat menjelaskan hal ini. Kesalahan terjadi ketika lebih dari satu bit berubah dalam satu waktu, seperti dari sektor 7 (0111) ke sektor 8 (1000). Pada gambar photosensor tidak tepat pada satu garis lurus. Dalam hal ini, sensor B1 di luar garis (tidak lurus) dan perubahan dari 1 ke 0 sebelum yang lainnya. Hal ini menyebabkan error sesaat pada output. Jika komputer meminta data selama waktu transisi ini, maka akan didapat data yang salah.
Salah satu solusinya adalah dengan menggunakan kode Grey pada disk sebagai ganti kode Binary. Dengan kode Grey hanya 1 bit yang berubah antara dua sektor, sehingga memungkinkan penghematan waktu dalam memprosesnya. Jika photocells tidak lurus, maka kesalahan yang terjadi adalah perubahan output yang terlambat atau lebih cepat. Dengan kata lain, kesalahan yang terjadi tidak pernah lebih dari satu nilai LSB dengan menggunakan kode Grey.
Thermocouple
Thermocouple terdiri atas dua kawat (A dan B) yang terbuat dari bahan yang berbeda. Kedua ujung masing-masing kawat disatukan (dililitkan atau disolder) pada dua titik, dimana salah satu titik disebut sebagai titik panas dan titik yang lainnya disebut sebagai titik dingin atau titik referensi yang dipertahankan
Gambar 2
Absolut Optical Encoder dengan kode Binary
Gambar 3
pada suatu temperatur yang konstan. Bila antara kedua titik atau junction tersebut terdapat perbedaan temperatur, maka akan timbul e.m.f
UT yang akan menghasilkan arus pada rangkaian. Dan bila titik referensi
ditutup oleh alat ukur atau instrumen pencatat, maka penunjukan alat ukur akan sebanding dengan selisih temperatur antara kedua junction tersebut.
Efek thermoelektrik yang diakibatkan oleh potensial-potensial kontak pada titik–titik junction ini dikenal dengan efek Seebeck dan sebagai akibat dari efek
Seebeck ini, maka akan timbul e.m.f termal sebesar UT dengan persamaan sebagai
berikut :
U
T=
K
AB(
T
M−
T
E)
Dengan KAB adalah tetapan sensitivitas termal dari pasangan kawat
tersebut, TB adalah temperatur referensi dan TM adalah temperatur yang diukur.
Dengan melakukan beberapa pengukuran UT maka harga KAB dapat diketahui.
Thermocouple seringkali digunakan sebagai elemen perasa pada sensor termal. Prinsip dasarnya adalah bahwa dua buah bahan logam yang berlainan selalu mempunyai hubungan potensial antara keduanya. Hubungan ini berubah sesuai dengan perubahan temperatur. Hubungan potensial tidak dapat diukur untuk sebuah junction saja, tetapi ketika dua buah junction pada sebuah sirkuit memiliki temperatur yang berbeda, maka sejumlah tegangan sebesar beberapa milivolt (mV) dapat dideteksi.
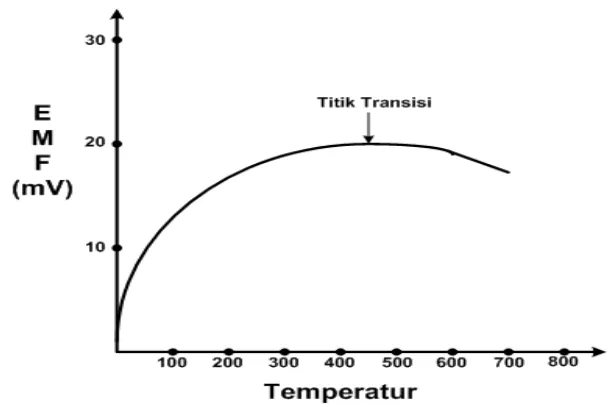
Karakteristik thermocouple akan menunjuk ke arah yang berlawanan ketika sudah melewati titik transisinya. Artinya, thermocouple hanya berfungsi pada temperatur yang terbatas. Ketika temperaturnya lebih tinggi dari titik baliknya, karakteristiknya menjadi berbalik arah. Untuk lebih jelasnya perhatikan gambar berikut ini :
Beberapa tipe thermocouple :
Type K (Chromel(Ni-Cr alloy)/ Alumel(Ni-Al alloy))
Bekerja pada range skala −200 °C to +1200 °C dengan sensitivitas 41 µV/°C.
Type E (Chromel/ Constantan (Cu-Ni alloy)) Memiliki output yang besar yaitu 68 µV/°C.
Type J (Iron / Constantan)
Bekerja pada range skala −40 to +750 °C dan memiliki sensitivitas ~52 µV/°C
Type N (Nicrosil (Ni-Cr-Si alloy) / Nisil (Ni-Si alloy)
PENGGUNAAN ON/OFF, TIMER, DAN COUNTER PLC
Programmable Logic Controllers (PLC) adalah komputer elektronik yang mudah digunakan (user friendly) yang memiliki fungsi kendali untuk berbagai tipe dan tingkat kesulitan yang beraneka ragam. Definisi Programmable Logic Controller menurut Capiel (1982) adalah :sistem elektronik yang beroperasi secara dijital dan didisain untuk pemakaian di lingkungan industri, dimana sistem ini menggunakan memori yang dapat diprogram untuk penyimpanan secara internal instruksi-instruksi yang mengimplementasikan fungsi-fungsi spesifik seperti logika, urutan, perwaktuan, pencacahan dan operasi aritmatik untuk mengontrol mesin atau proses melalui modul-modul I/O digital maupun analog.
Berdasarkan namanya konsep PLC adalah sebagai berikut :
1. Programmable, menunjukkan kemampuan dalam hal memori untuk menyimpan program yang telah dibuat yang dengan mudah diubah-ubah fungsi atau kegunaannya.
2. Logic, menunjukkan kemampuan dalam memproses input secara aritmatik dan logic (ALU), yakni melakukan operasi membandingkan, menjumlahkan, mengalikan, membagi, mengurangi, negasi, AND, OR, dan lain sebagainya.
meng-ON atau meng-OFF kan output-output. 1 menunjukkan bahwa keadaan yang diharapkan terpenuhi sedangkan 0 berarti keadaan yang diharapkan tidak terpenuhi. PLC juga dapat diterapkan untuk pengendalian sistem yang memiliki output banyak.
Fungsi dan kegunaan PLC sangat luas. Dalam prakteknya PLC dapat dibagi secara umum dan secara khusus.
Secara umum fungsi PLC adalah sebagai berikut:
1. Sekuensial Control. PLC memproses input sinyal biner menjadi output yang digunakan untuk keperluan pemrosesan teknik secara berurutan (sekuensial), disini PLC menjaga agar semua step atau langkah dalam proses sekuensial berlangsung dalam urutan yang tepat.
2. Monitoring Plant. PLC secara terus menerus memonitor status suatu sistem (misalnya temperatur, tekanan, tingkat ketinggian) dan mengambil tindakan yang diperlukan sehubungan dengan proses yang dikontrol (misalnya nilai sudah melebihi batas) atau menampilkan pesan tersebut pada operator.
Sedangkan fungsi PLC secara khusus adalah dapat memberikan input ke CNC (Computerized Numerical Control). Beberapa PLC dapat memberikan input ke CNC untuk kepentingan pemrosesan lebih lanjut. CNC bila dibandingkan dengan PLC mempunyai ketelitian yang lebih tinggi dan lebih mahal harganya. CNC biasanya dipakai untuk proses finishing, membentuk benda kerja, moulding dan sebagainya.
sekumpul-an instruksi dengan mengimplementasikan fungsi-fungsi tertentu, seperti logika, sekuensial, pewaktuan, perhitungan, dan aritmetika, untuk mengendalikan berbagai jenis mesin ataupun proses melalui modul I/O digital dan atau analog.
Elemen-elemen dasar sebuah PLC ditunjukkan pada gambar
Dalam system PLC terdapat 4 komponen bagian utama, keempat komponen bagian utama tersebut:
1. Central Processing Unit (CPU)
2. Monitor/programmer 3. Module I/O PLC 4. Power Supply
symbol inputan dan keluaran yang memiliki alamat-alamat tertentu, symbol tersebut antara lain:
Normally open (NO), keadaan input-an (dapat berupa saklar, puss button, sensor,dll) yang normalnya pada posisi OFF, dan akan ON bila relay telah ter-energies
---| |--- Normally open (NO)
Normally close (NC), keadaan input-an yang normalnya pada posisi ON, dan akan OFF bila relay telah terenergies
---|/|--- Normally close(NC)
Output, keluaran dapat berupa relay, lampu, Buzzer, motor, pneumatic, dll
---( )-| output
Timer, pewaktu (delay) yang dapat diatur pada PLC memiliki teknologi solid state sehingga mempunyai kecermatan dan kecepatan yang lebih baik dibandingkan dengan relay konvensional
mereset keluaran pencacah. Pada pengoperasian pencacah turun (down-counter) dimulai dari nilai setting-nya dan ketika telah mencapai nilai 0 maka akan mengaktifkan keluaran pencacah
---|---| Counter |CNT |