5
LANDASAN TEORI
Bab ini membahas mengenai Programmable Logic Controller (PLC) yang mencakup tentang teori dasar, konstruksi, dan instruksi-instruksi program dalam PLC merek OMRON tipe CQM 1H – CPU21 dan peralatan penunjang lainnya.
2.1 PLC (PROGRAMMABLE LOGIC CONTROLLER)
PLC ( Programmable Logic Controller ) adalah sebuah alat yang digunakan untuk menggantikan rangkaian sederetan relai yang dijumpai pada kontrol konvensional1. Menurut National Electrical Manufacturing Assosiation (NEMA) PLC didefinisikan sebagasi suatu perangkat elektronik digital dengan memori yang dapat diprogram untuk menyimpan instruksi-instruksi yang menjalankan fungsi-fungsi spesifik seperti: logika, sekuen, timing, counting, dan aritmatika untuk mengontrol suatu mesin industri atau proses industri sesuai dengan yang diinginkan.
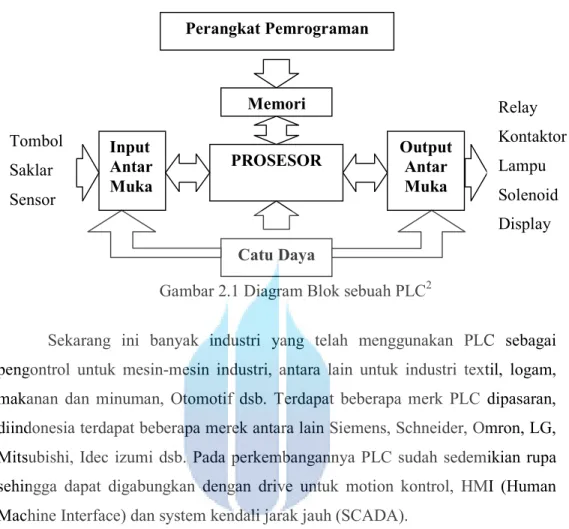
PLC dapat dipakai untuk menggantikan sistem kontrol konvensional yang menggunakan relay elektromekanis dalam jumlah yang membutuhkan sistem pengawatan yang rumit. PLC bekerja dengan cara memonitor sinyal-sinyal masukan dari sumbernya, seperti tombol-tombol, saklar dan sensor. Bila perubahan pada sinyal-sinyal input terdeteksi, maka sistem kontrol akan bekerja, sesuai dengan program yang dibuat oleh user, melalui logika internal terprogram sehingga mampu menghasilkan sinyal-sinyal output. Kemudian sinyal-sinyal output ini akan mengaktifkan beban-beban luar suatu sistem kontrol, seperti: kontaktor, relay, solenoid valve, lampu-lampu indikator, dan alarm. Berikut ini merupakan Blok diagram dari sebuah system PLC.
1
Gambar 2.1 Diagram Blok sebuah PLC2
Sekarang ini banyak industri yang telah menggunakan PLC sebagai pengontrol untuk mesin-mesin industri, antara lain untuk industri textil, logam, makanan dan minuman, Otomotif dsb. Terdapat beberapa merk PLC dipasaran, diindonesia terdapat beberapa merek antara lain Siemens, Schneider, Omron, LG, Mitsubishi, Idec izumi dsb. Pada perkembangannya PLC sudah sedemikian rupa sehingga dapat digabungkan dengan drive untuk motion kontrol, HMI (Human Machine Interface) dan system kendali jarak jauh (SCADA).
PLC ( Programmable Logic Controller ) menyerupai komputer elektronik yang mudah digunakan ( user friendly ) yang memiliki fungsi kendali untuk berbagai tipe dan tingkat kesulitan yang beranekaragam sesuai dengan dengan kompleksitas program. Programmable Logic Controller ( PLC ) adalah suatu rangkaian micro controller yang terdiri dari beberapa bagian, yaitu CPU, Memory, Data Register, Internal relay, Input / Output Counter dan Timer yang terintegrasi dalam satu perangkat.
PLC dapat digambar dengan garis dan diagram ladder. PLC menyederhanakan pengawatan dari sistem yang sebenarnya lebih rumit. Pada PLC keadaannya dinyatakan dengan 1 (ON) dan 0 (OFF). Satu menunjukkan bahwa keadaan yang diharapkan terpenuhi, sedangkan nol berarti keadaan yang
2
Programmable Logic Controller, Sebuah Pengantar, William Bolton.hal 2
PROSESOR Catu Daya Perangkat Pemrograman Memori Output Antar Muka Input Antar Muka Tombol Saklar Sensor Relay Kontaktor Lampu Solenoid Display
diharapkan tidak terpenuhi. PLC juga dapat diterapkan untuk pengendalian sistem yang memiliki output banyak.
Sistem PLC berdasarkan Konstruksi mekanik dapat dibagi menjadi dua jenis, yaitu tipe kotak tunggal (compact type) dan tipe modular/rak (Modular/Rack Type). Tipe kotak tunggal umumnya digunakan untuk unit pengontrol berukuran kecil yang dapat diprogram dan dipasarkan dalam bentuk kemasan kompak, lengkap dengan power supply, prosesor, memori, dan unit input/ output. Sedangkan tipe modular terdiri dari modul-modul yang terpisah, masing-masing untuk Power supply, prosesor (CPU), modul input/ output, dan Modul special . Modul-modul ini dihubungkan satu dengan yang lainnya dengan cara ditancapkan melalui slot yang terdapat pada Base Plate yang berbentuk mirip rak penghubung, atau dengan cara dihubungkan secara langsung antar modul dengan menggunakan konektor tertentu.
2.1.1 Bagian – Bagian PLC
Sebagai perangkat pengendali proses, PLC mempunyai bagian – bagian penting yang mendukung unjuk kerja sistemnya. Bagian – bagian itu terbagi kedalam 4 komponen utama yaitu :
2.1.1.1 Modul Catu Daya (Power Supply Unit)
Modul ini mengubah tegangan sumber 110/ 220 VAC atau 24 VDC menjadi 5 VDC. Modul ini juga memberikan input tegangan 5 VDC untuk CPU (prosesor) agar dapat beroperasi, dan 120 VAC sampai 240 VAC untuk modul input/ output eksternal. Modul catu daya biasanya terletak pada slot yang paling ujung (kiri) dari modul PLC secara keseluruhan. Pada prakteknya seringkali user menggunakan power supply dengan merek yang berbeda dengan merek PLC yang sesuai dengan spesifikasi PLC yang dipakai,
Pada modul ini terdapat lampu indikator yang menandakan kondisi ‘on’ saat catu daya mendapatkan sumber tegangan. Pada modul ini juga terdapat terminal-terminal sebagai sumber tegangan (100 – 240 VAC), terminal-terminal untuk external
output, seperti sensor-sensor atau relay 24 VDC, serta terminal untuk pentanahan sistem (grounding).
Gambar 2.2 Modul Catu daya untuk PLC OMRON Tipe CQM1H3
2.1.1.2 Central Processing Unit ( CPU )
CPU adalah unit yang berisi mikroprosesor yang menginterpretasikan sinyal-sinyal input dan melaksanakan tindakan-tindakan pengontrolan sesuai dengan program yang tersimpan didalam memory, lalu mengkomunikasikan keputusan-keputusan yang diambilnya sebagai sinyal kontrol ke antarmuka output4. CPU merupakan otak dari PLC, Program dipanggil dari unit memori dan diproses oleh CPU. Proses tersebut disebut sebagai menjalankan program, yang terjadi sebenarnya adalah program discan atau diperiksa oleh CPU secara berurutan dari alamat awal program hingga akhir program ( Instruksi END ), pada beberapa tipe PLC instruksi END harus diletakkan pada bagian akhir dari program, akan tetapi tidak semua PLC harus memakai instruksi END pada akhir program yang dibuat. CPU berfungsi untuk mengontrol dan mengawasi semua pengoperasian dalam PLC, melaksanakan program yang disimpan di dalam memori.
3
SYSMAC CQM1H Programmable Logic Controller, hal 8. 4
Gambar 2.3 CPU Omron SYSMAC CQM1H – CPU215
2.1.1.3 Modul Input
Unit Input/ouput menyediakan Antarmuka yang menghubungkan antara system dengan dunia luar, memungkinkan dibuatnya sambungan (koneksi) antara perangkat-perangkat input, semisal sensor, dengan perangkat-perangkat output semisal motor atau solenoida, melalui kanal-kanal input/output. Setiap titik input/output mempunyai alamat yang identik. Penulisan dan alamat pada masing-masing merk PLC dapat berbeda.
Gambar 2.4 Modul input PLC OMRON Tipe CQM1H6
Semua sinyal input terkumpul di antarmuka input, sinyal-sinyal input biasanya 24 VDC atau 110-220 VAC. Unit PLC yang sesuai harus dipilih untuk dapat bekerja dengan tergangan input yang dipilih. Untuk melindungi CPU dari tegangan dan arus yang berbahaya, maka terminal-terminal input diisolasi dengan menggunakan metode Optoisolation, artinya tidak ada tegangan yang ditransmisi dari terminal-terminal input menuju CPU, hanya pulsa-pulsa optic ( cahaya). Metode ini digunakan oleh sebagian besar PLC.
5
SYSMAC CQM1H Programmable Logic Controller, hal. 8 6
Gambar 2.5 Rangkaian Switching Antarmuka Input (Tipe Input CQM – ID212) 7
Setiap input memiliki alamat dan nomor urutan khusus yang digunakan selama membuat program untuk memonitor satu persatu aktivitas input dan output didalam program. Pada PLC Omron CQM1H CPU 21 memiliki relay internal untuk input sebesar 256 bit, dengan penomoran mulai dari 00000 sampai dengan 01515.
2.1.1.4 Modul Output
Modul output ini juga berfungsi sebagai antar muka yang menghubungkan sistem dengan perangkat luar (external). Modul ini meneruskan hasil program user dari CPU yang berupa sinyal output (on atau off) ke perangkat luar yang berfungsi sebagai outputan.
Modul ini dapat ditempatkan dimana saja, disesuaikan dengan keinginan user. Pada PLC CQM1H CPU 21 tersedia tiga jenis tipe dari modul output, yaitu: output tipe relay, output tipe transistor, dan output tipe triac.
Gambar 2.6 Output Module PLC OMRON Tipe CQM18
7
Ibid, hal. 26 8
Pengalamatan output Menggunakan Bit IR 100.00 sampai dengan maksimum IR 115.15 atau Word IR 100 sampai dengan IR 115.
2.1.2 Cara kerja PLC :
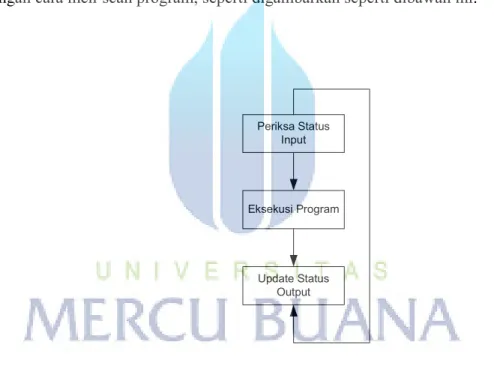
Untuk dapat menggunakan PLC, cukup dengan menguhubungkan sensor pada bagian input device PLC dan alat – alat yang dikontrol pada bagian output device PLC. Kemudian program yang ada dalam PLC akan memproses data dari masukan input device PLC dan outputnya akan bekerja sesuai dengan program yang dibuat dan tersimpan di dalam memory PLC. PLC bekerja secara kontinyu dengan cara men-scan program, seperti digambarkan seperti dibawah ini:
Periksa Status Input
Eksekusi Program
Update Status Output
Gambar 2.7 Proses scanning program dalam PLC9 Keterangan :
Periksa status masukan, pertama PLC akan melihat masing-masing status keluaran apakah kondisinya sedang ON atau OFF. Dengan kata lain, apakah sensor yang terhubungkan dengan masukan ON? Bagaimana dengan yang terhubungkan pada masukan kedua? Demikian seterusnya, hasilnya disimpan ke dalam memori yang terkait dan akan digunakan pada langkah berikutnya.
9
Eksekusi program, berikutnya PLC akan mengerjakan atau mengeksekusi program anda (diagram tangga) per instruksi.
Perbaharui status keluaran, akhirnya PLC akan memperbaharui atau meng-update status keluaran. Pemabaharuan keluaran ini bergantung pada masukan mana yang ON selama langkah 1 dan hasil dari eksekusi program di langkah 2. Jika masukan pertama statusnya ON, maka dari langkah 2, eksekusi program akan menghasilkan keluaran pertama ON, sehingga pada langkah 3 ini keluaran pertama akan diperbaharui menjadi on.
Peralatan input dapat berupa sensor photo-elektrik, push button dan panel kontrol, limit switch atau peralatan lainnya dimana dapat menghasilkan suatu sinyal yang dapat diterima PLC. Peralatan output dapat berupa switch yang menggerakkan lampu indikator, relai yang menyalakan motor atau peralatan lain yang dapat digerakkan oleh sinyal output dari PLC.
Selain itu, PLC juga menggunakan memori yang dapat diprogram untuk menyimpan instruksi-instruksi yang melaksanakan fungsi-fungsi khusus seperti : logika, pewaktuan, sekuensial dan aritmetika yang dapat mengendalikan suatu mesin atau proses melalui modul – modul I/O baik analog maupun digital.
2.1.3 Cara memprogram PLC :
PLC dapat diprogram dengan dua cara yaitu dengan menggunakan Handy Programmer atau dengan menggunakan Personal Computer melalui software khusus. Metoda programnya menggunakan program yang berbentuk Ladder atau Statement List, Blok diagram Bahasa C dan teks terstruktur pada saat yang bersamaan.
2.1.4 Dasar-dasar Pemrograman dan Perancangan kontrol dengan PLC Sebuah perangkat PLC memiliki bahasa pemrograman yang mudah dipahami, dapat diprogram, dapat dikendalikan dan dioperasikan sesuai dengan sistem yang telah ada, dimana dalam penggunaannya PLC merupakan konversi dari kontrol konvensional kemudian dirubah menjadi sebuah program kontrol. Menurut IEC 1131-3 bahasa pemrograman yang digunakan untuk memprogram
suatu PLC antara lain Ladder Diagram, Function Block Diagram, Statement List, Structure Text, dan Sequential Functional Chart. Tetapi dalam aplikasi nyatanya bahasa pemrograman PLC yang paling banyak digunakan adalah jenis ladder diagram. Program yang telah siap dimasukan ke CPU PLC untuk dieksekusi melalui komputer yang nantinya PLC tersebut dihubungkan ke peralatan-peralatan kontrol yang telah ada.
Pemahaman dasar–dasar pemrograman Ladder Diagram perlu dilakukan sebelum menggunakan bahasa program PLC pada level yang lebih tinggi, agar dapat mengetahui prinsip dasar dari kerja PLC. Pemrograman PLC yang digunakan untuk membuat kontrol pada tugas akhir ini menggunakan software CX-Programmer.
2.1.4.1 Pemrograman PLC
Prosedur Perancangan dan Pengoperasian PLC dapat dilaksanakan dengan langkah-langkah berikut :
a. Menentukan deskripsi kerja suatu mesin, kelompok mesin ataupun suatu proses produksi yang akan dikontrol.
b. Menentukan input maupun output yang harus dihubungkan dari PLC ke mesin ataupun proses, sesuai dengan deskripsi yang telah ditetapkan
c. Membuat rangkaian kontrol mesin ataupun proses, dengan sistem diagram tangga, struktur text atau statement List.
d. Mengecek hasil pemrograman dengan menggunakan simulator, dalam hal ini dapat menggunakan program simulasi PLC untuk beberapa tipe PLC yang memiliki software tersebut.
e. Menghubungkan peralatan input maupun output PLC dengan peralatan luar.Melaksanakan uji coba hasil program dengan mesin-mesin yang akan dikontrol.
f. Menyimpan hasil program yang telah dibuat.
g. Mengoperasikan PLC yang telah deprogram untuk mengontrol mesin-mesin ataupun proses produksi.
2.1.4.2 Pengalamatan Input/Output
Dalam pembuatan suatu diagram tangga, tidaklah cukup hanya menuliskan instruksi input maupun output saja yang akan digunakan, melainkan juga harus diikuti dengan nomor alamat dari masing-masing input atau output tadi. Untuk PLC OMRON CQM1H-CPU21 ini, alamat input diwakili oleh “X” dan alamat
output diwakili oleh “Y” yang diikuti dengan alamat dari masing-masing input atau output tersebut. Nomor input 3 digit bilangan heksadesimal dan output ditunjukan dalam 5 digit bilangan heksadesimal. Sebagai contohnya:
X00000 : Huruf X menunjukkan bahwa ini adalah input, angka pertama,
kedua, dan ketiga menunjukkan alamat register yaitu pada register 00 atau biasa disebut Channel, dan angka terakhir menunjukkan bit posisi pada modul input yang berada pada bit posisi 00. Pada gambar 2.8 pengalamatan modul input pertama pada register 0001.00 s/d 0001.15 biasanya ditulis 0.00 s/d 01.15.
Y10000 : Huruf Y menunjukkan bahwa ini adalah output, angka pertama,
kedua dan ketiga menunjukkan alamat register atau channel yaitu pada register 100, dan dua angka yang terakhir menunjukkan bit posisi pada modul output yang berada pada bit posisi 00. Pada gambar 2.8 pengalamatan modul Output pada register/channel 100 karena 32 point maka pengalamatan ditulis mulai dari 100.000 s/d 101.15 dilanjutkan dengan 102.00, dan seterusnya.
Gambar 2.8 Pengalamatan Input/Output10
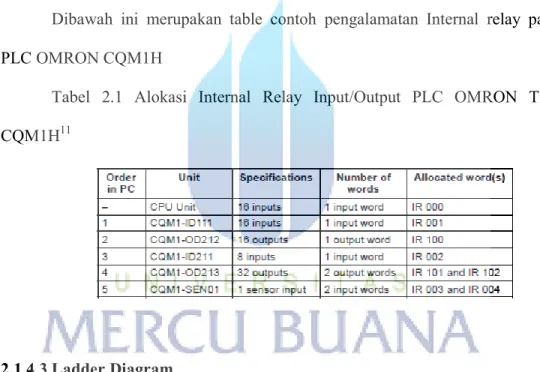
Dibawah ini merupakan table contoh pengalamatan Internal relay pada PLC OMRON CQM1H
Tabel 2.1 Alokasi Internal Relay Input/Output PLC OMRON Tipe CQM1H11
2.1.4.3 Ladder Diagram
Ladder diagram merupakan salah satu cara dalam membuat konversi dari kontrol konvensional yang terdiri dari satu garis lurus vertikal di sisi kiri dan garis–garis percabangan yang menuju ke kanan. Garis vertikal ini disebut busbar. Garis–garis percabangan disebut garis instruksi. Instruksi–instruksi di garis percabangan akan menentukan kondisi output pada sisi kanan, yaitu ON atau OFF.
10
CQM1H Programming Manual (Omron, 2000), hal. 143 11
Pembacaan Ladder Diagram adalah dari sebelah kiri (busbar) ke kanan dan seterusnya menuju ke bawah. Sistem pembacaan ini merupakan aturan dalam pembuatan program PLC.
Garis instruksi pada ladder diagram dapat bercabang lagi untuk membentuk garis instruksi baru. Pembacaan relay–relay dinyatakan dengan istilah–istilah logika, seperti Load (LD), AND dan OR, dan dapat digunakan dalam kondisi kebalikan seperti Load Not (LD NOT), AND NOT dan OR NOT.
Dalam melakukan pemrograman dengan menggunakan Instruksi Ladder diagram ada beberapa tahapan yaitu sebagai berikut :
• Ladder Diagram pada dasarnya berasal dari rangkaian logika. Sistem kontrol yang akan dibentuk perlu dibuat per blok fungsinya dengan deskripsi kerja sedetail mungkin, yaitu saat ON dan OFF-nya.
• Ladder Diagram bekerja dengan sinyal–sinyal digital. Seperti misalnya AND, OR maupun lawannya dari masing-masing logika.
• Dengan rangkaian logika yang ada dapat langsung dirubah ke dalam bentuk Ladder Diagram dan dirubah menjadi data mneumonic yang siap dimasukkan menjadi sebuah program PLC.
2.1.4.4 Instruksi Umum Ladder Diagram
Dalam pembuatan instruksi Ladder Diagram terdapat instruksi-instruksi dasar yang umum dipakai yaitu :
a. Load ( LD ) dan Load Not ( LD NOT )
Instruksi LD merupakan instruksi dalam memasukan kontak yang dikehendaki sebagai bagian awal dari suatu garis instruksi. Sedangkan untuk LD NOT merupakan instruksi untuk menandakan kontak NC (Normally Close) pada instruksi awal. Baik LD maupun LD NOT dapat berupa : Kontak Internal Relay, Kontak output, HR, LR, TIM, CNT. Terkadang perintah LOAD (LD) juga disebut dengan examined if on (XIO). Artinya perintah ini akan bernilai benar atau 1 apabila diekseskusi, dan sebaliknya bernilai salah atau 0 apabila tidak dieksekusi. Perintah LOAD NOT juga disebut dengan examined if closed (XIC). Artinya
perintah ini akan bernilai salah atau 0 apabila dieksekusi, dan sebaliknya bernilai benar atau 1 apabila tidak dieksekusi.
Gambar 2.9 Instruksi LD dan LD NOT12
b. AND dan AND NOT
Instruksi AND digunakan untuk memasukan input yang diseri dengan input yang sebelumnya.dalam satu garis instruksi. Sedangkan untuk AND NOT merupakan lawan dari instruksi AND yang menandakan kontak dalam keadaan close atau tertutup (NC).
Gambar 2.10 Instruksi AND dan AND NOT13
c. OR dan OR NOT
Instruksi OR digunakan untuk memasukan kontak yang diparalel dengan kontak yang sebelumnya pada garis instruksi yang terpisah, dimana instruksi yang pertama LD dan selanjutnya OR atau OR NOT.
Gambar 2.11 Instruksi OR dan OR NOT14
12 Ibid, hal. 176 13 Ibid. 14 Ibid, hal. 177
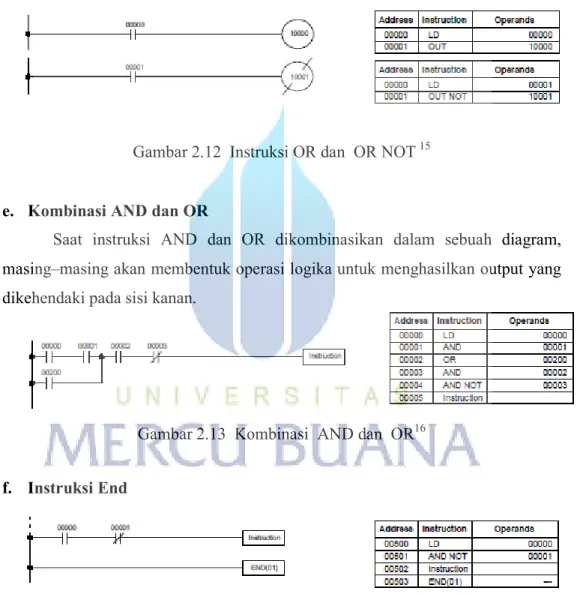
d. OUTPUT dan OUTPUT NOT
Instruksi OUTPUT dan OUTPUT NOT merupakan instruksi hasil dari instruksi sebelumnya. Dibawah ini merupakan contoh instruksi Output dan OUTPUT NOT. Internal relay 10000 akan ON jika internal relay 00000 ON, sedangkan untuk internal relay 10001 ON jika internal relay 00001 OFF.
Gambar 2.12 Instruksi OR dan OR NOT15
e. Kombinasi AND dan OR
Saat instruksi AND dan OR dikombinasikan dalam sebuah diagram, masing–masing akan membentuk operasi logika untuk menghasilkan output yang dikehendaki pada sisi kanan.
Gambar 2.13 Kombinasi AND dan OR16
f. Instruksi End
Gambar 2.14 Instruksi End17
15 Ibid, hal. 178 16 Ibid. 17 Ibid, hal. 179
Instruksi ini digunakan untuk akhir program, saat program dieksekusi maka program discan dari atas kebawah, dari kiri kekanan sampai instruksi [End].
2.1.4.5 Instruksi Tambahan
Adapun Instruksi tambahan yang digunakan pada program ladder Travelling bucket adalah sbb :
a. Timer (TIM)
Instruksi TIM (Timer) dapat digunakan sebagai pewaktu delay ON juga sebagai rangkaian relay. TIM adalah pengurangan instruksi pewaktu delay ON yang membutuhkan angka Timer dan nilai set (SV) yang berkisar dari 0000 sampai 9999 (0 sampai 9999 detik)18 Timer memiliki size memory sebesar 512 bit, artinya penomeran timer berkisar dari TIM/CNT 000 hingga TIM/CNT 511.
Gambar 2.15 Simbol ladder Timer19
Gambar 2.16 Contoh Pemakaian Instruksi Timer
18 Ibid, hal. 229 19 Ibid. LD Input 10000 Reset TIM001 # 100 TIM 001 10000
Timer akan mulai menghitung saat Input ON, saat setting timer tercapai maka TIM001 ON yang selanjutnya menaktifkan Internal relay 10000. Saat internal relay Reset ON maka current value Timer akan menjadi nol.
b. Counter (CNT)
CNT (Counter) adalah sebuah counter penurunan yang diset terlebih dahulu. Penurunan satu hitungan setiap kali saat sebuah sinyal input berubah dari OFF ke ON. Counter harus diprogram dengan input hitung, input reset angka counter, dan nilai set (SV). Nilai set ini dapat berkisar dari 0000 sampai 9999. Counter memiliki size memory sama dengan timer sebesar 512 bit, artinya penomeran timer berkisar dari TIM/CNT 000 hingga TIM/CNT 51120. Timer dan Counter memiliki lokasi memori yang sama oleh karena itu penomeran Timer dan Counter tidak boleh sama.
Gambar 2.17 Simbol ladder Timer21
Gambar 2.18 Contoh Pemakaian Instruksi Counter
20 Ibid, hal. 518 21 Ibid, hal. 230 LD Input Hitung Reset CP R CNT 001 # 10 10000 CNT 001
2.2 Peralatan Penunjang 2.2.1 Peralatan Pengaman
Peralatan pengaman merupakan suatu peralatan yang dimanfaatkan untuk mengamankan suatu sistem rangkaian contoh peralatan pengaman, diantaranya :
- MCB ( Miniatur Circuit Breaker ) - TOR (Thermal Overload Relay)
2.2.1.1 MCB ( Miniatur Circuit Breaker )
Adalah peralatan penghubung atau pemutus yang berfungsi sebagai pengaman rangkaian (sistem) dari beban lebih atau hubung singkat. Di dalam MCB terdapat kumparan yang berfungsi sebagai pengaman bila terjadi hubung singkat dan bimetal bila terjadi beban lebih.
Simbol :
Gambar 2.19 Skematik diagram Miniatur Circuit Breaker22
Prinsip kerjanya : • Operasi thermal
Jika arus yang mengalir pada MCB melebihi batas nominal yang diijinkan maka bimetal pada MCB akan menjadi panas. Karena perbedaan muai panjang antara logam yang satu dengan logam yang lain maka bimetal akan melengkung. Melengkungnya bimetal akan menekan tuas pemutus kontak, sehingga mekanisme pengunci kontak akan mengendor dan spring (pegas) akan menarik lengan kontak sehingga arus terputus. Pemutusan secara thermis ini berlangsung secara lambat.
22
• Operasi Magnetik
Bila pada rangkaian listrik terjadi hubung singkat, maka arus yang mengalir pada MCB menjadi sangat besar sehingga pada kumparan timbul medan magnet yang sangat kuat. Medan magnet ini akan menarik angker dari besi lunak sehingga rangkaian terputus. Pada pemutusan secara megnetik ini timbul bunga api yang diarahkan ke peredam.
Karakteristik MCB
Karakteristik MCB jenis B, C, D dan CL dinyatakan dalam In dan waktu dimana tidak boleh trip dan harus trip dapat dilihat pada ketentuan pengujian tabel 2.3 di bawah ini :
Tabel 2.2 Karakteristik MCB
Pengu Jian
Jenis Arus Uji
Kondisi Batas waktu tidak trip atau trip Hasil yang diperoleh A B C D E B,C,D CL B,C,D CL B,C,D CL B C D CL B C D CL 1,13 In 1,05 In 1,45 In 1,2 In 2,55 In 1,2 In 3 In 5 In 10 In 4 In 5 In 10 In 50 In 6 In Dingin Segera setelah pengujia n Dingin Panas Dingin Dingin
T ≥ 1 jam (untuk In < 63A) T ≥ 2 jam (untuk In > 63A) T ≥ 1 jam
T ≥ 1 jam (untuk In < 63A) T ≥ 2 jam (untuk In > 63A) T ≥ 1 jam 1 detik <t<60 detik (In < 32 A) 1 detik <t≥120 detik (In > 32 A) t ≥ 120 detik t> 0,1 detik t> 0,2 detik t< 0,1 detik t< 0,2 detik Tidak trip Trip Trip Trip Trip
SPLN3-1978, Pentanahan jaringan tegangan rendah PLN dan Pentanahan Instalasi Catatan : Istilah “dingin” maksudnya pada pembebanan awal, pada suhu kalibrasi acuan
Karakteristik MCB menurut IEC yang mendekati karakteristik CL yang digunakan oleh PT. PLN (Persero) ialah tipe B.
Adapun penggunaan tipe-tipe tersebut ialah :
Tipe B : Sebagai pengaman kabel atau penghantar terutama untuk perumahan Tipe C : Sebagai pengaman kabel atau penghantar terutama sangat
menguntungkan bila arus inrush tinggi misalnya lampu mercury, motor. Tipe D : Untuk penerapan yang menyangkut menimbulkan pulsa cukup besar :
contoh transformator, katup selenoid, kapasitor.
2.2.1.2 Thermal-Magnetik Circuit Breaker (Thermal Overload Relay)
Adalah alat yang digunakan untuk pengamanan terhadap beban lebih. Pengaman ini bekerja berdasarkan panas akibat arus yang melebihi nominal. Karena panas ini bimetal akan mengubah energi panas tersebut, menjadi energi gerak untuk melepas kontak sehingga rangkaian kontrol akan terputus dari sumber tegangannya dan peralatan terhindar dari kerusakan. Untuk mengembalikan ke posisi semula dengan menekan tombol reset. Hal ini dapat dilakukan jika bimetal telah lurus kembali.
Gambar 2.20 Skematik diagram Thermal Overload Relay
2.2.2 Peralatan Input/Output
Komponen-komponen rangkaian yang digunakan dalam pembuatan Tugas Akhir ini antara lain :
• Switch (saklar)
• Motor Induksi 3 phasa • Counter
• Relay
• Lampu Tanda
2.2.2.1 Switch (saklar)
Cara kerja saklar adalah sistem mengunci (maintain) yaitu akan mengunci bila ditekan dan untuk mengembalikan ke posisi normal harus ditekan kembali. Saklar adalah alat bantu untuk memutuskan atau menghubungkan dan mengubah menjadi beban atau tidak (PUIL 1987 Pasal 51 hal 17). Saklar harus memenuhi persyaratan sebagai beikut :
1. Saklar dan kontak-kontaknya sekurang-kurangnya harus mempunyai kemampuan sesuai dengan alat yang dihubungkan tetapi tidak lebih kecil dari 5 A.
2. Harus dipasang sedemikian rupa sehingga dapat dicapai dan dilayani dengan aman, tanpa tindakan sebelumnya.
3. Jumlah saklar harus sedemikian rupa sehingga semua pekerjaan, pemeliharaan dan perbaikan pada instalasi dapat dilakukan dengan aman.
4. Dalam keadaan terbuka, bagian-bagian saklar yang bergerak harus tidak bertegangan.
5. Harus tidak dapat menghubungkan dengan sendirinya karena pengaruh gaya berat (PUIL 1987 Pasal 840 C6 hal 430).
Jenis-jenis saklar yaitu :
a. Saklar Utama (Main Switch) b.Saklar Pilih (Selector Switch) c.Tombol Tekan (Push Button)
2.2.2.2 Saklar Utama (Main Switch)
Main switch digunakan untuk mengaktifkan atau memutuskan sumber tegangan ke panel kontrol dalam keadaan berbeban atau tidak bertegangan. Main Switch mempunyai dua kontak yaitu NC (Normally Close) dan NO (Normally Open). Untuk mengoperasikannya dengan memutar knop ke posisi 1 dan untuk memutuskannya dengan memutar knop ke posisi 0.
0 1
Gambar 2.21 Simbol Main Switch
2.2.2.3 Saklar Pilih (Selector Switch)
Saklar pilih terdiri dari poros yang dapat diputar dengan satu atau lebih piringan. Pada piringan ini terdapat lekuk-lekuk dan pada porosnya dipasang terminal. Saklar ini umumnya dilengkapi dengan alat penahan pada setiap kedudukannya. Pada saklar ini yang berputar adalah porosnya, sedangkan kontak-kontaknya tidak ikut berputar. Saklar ini digunakan untuk mengatur kondisi rangkaian, apakah rangkaian/sistem bekerja secara manual atau automatis, dengan cara memutar knop/tuas ke posisi A (untuk keadaan automatis) atau posisi M (untuk posisi manual).
Gambar 2.22 Simbol Selector Switch
2.2.2.4 Tombol Tekan (Push Button)
Tombol ini cara mengoperasikannya dengan menekan knopnya. Tombol tekan ini ada yang mempunyai dua jenis kontak, yaitu kontak NO dan NC dan satu jenis kontak yaitu NO saja atau NC saja. Tombol tekan termasuk sistem monitor, kontak NO akan menutup jika di tekan dan akan kembali ke posisi normal jika tekanan dihilangkan, begitu pula kontak NC akan membuka jika ditekan dan akan menutup kembali jika tekanan dilepas.
Gambar 2.23 Simbol Tombol Tekan
Untuk membedakan fungsi dari tombol tekan maka knop diberi warna yang berbeda, seperti terlihat dalam tabel dibawah ini :
Tabel 2.3 Arti Warna-warna tombol tekan (VDE 0113/12.73 and IEC Publ.204.1965)
Warna Arti Aplikasi
Merah Stop atau Off
Emergency Off
Untuk menghentikan bagian-bagian mesin
Emergency stop
Hijau/Hitam Start atau On Untuk menjalankan mesin Kuning Start dari kondisi berbahya atau
kondisi kerja normal
Mesin kembali bekerja
Putih/Biru Selain fungsi diatas Kontrol dari fungsi bantuan yang tidak dihubungkan secara langsung dengan proese kerja
2.2.2.5 Motor Induksi 3 fasa
Struktur motor induksi tiga terdiri dari 2 bagian utama yaitu rotor (bagian yang berputar) dan stator (bagian yang diam). Penamaan motor induksi ( motor asinkron ) berasal dari kenyataan bahwa arus rotor motor bukan diperoleh dari sumber tertentu, tetapi merupakan arus yang terinduksi sebagai akibat adanya
perbedaan relative antara putaran rotor dengan medan putar ( rotating magnetic field ) yang dihasilkan oleh stator23.
Gambar 2.24 Kumparan stator24
Gambar 2.25 Contoh struktur motor tiga fasa enclose dengan fan25
Jika suatu kumparan stator tiga fasa dihubungkan dengan tegangan bolak-balik (AC) maka akan menghasilkan medan magnet yang berputar terhadap ruang dengan kecepatan sinkron (
p f ns
2 120
= ). Medan putar inilah yang pada dasarnya
menjadi prinsip kerja dari motor induksi. Medan putar stator tersebut akan memotong batang konduktor pada rotor, akibatnya pada kumparan rotor akan timbul tegangan induksi (ggl) sebesarE2s =4.44f2N2φm, E2s merupakan tegangan induksi saat rotor berputar. Kumparan rotor merupakan rangkaian tertutup
23
Dasar Teknik Tenaga Listrik dan Elektronika Daya, (Jakarta,2009), hal. 101. 24
Ibid,;. 25
sehingga dihasilkan arus (I), adanya arus didalam medan magnet akan menimbulkan gaya pada rotor (F) 26. Terdapat dua jenis motor induksi yaitu motor induksi Rotor belitan dan motor induksi rotor sangkar.
Motor Induksi rotor belitan mempunyai rotor dengan belitan kumparan tiga fasa sama seperti kumparan stator, dimana kumparan stator dan rotor juga mempunyai jumlah kutub yang sama27. Tahanan luar yang dapat diatur tersebut dihubungkan ke rotor melalui cincin seperti pada gambar 2.21. Penambahan tahanan luar sampai harga tertentu, dapat membuat kopel mula mencapai harga kopel maksimumnya yang dibutuhkan saat start, selain itu fungsi tahanan luar tersebut adalah untuk membatasi arus mula yang besar pada saat start28.
Gambar 2.26 Motor rotor belitan dengan penambahan tahanan luar29
Motor Induksi rotor sangkar memiliki rotor dengan kumparan yang terdiri dari beberapa batang konduktor yang disusun sedemukian rupa sehingga menyerupai sangkar tupai pada gambar 2.27 (a). Untuk membatasi arus mula yang besar, tegangan sumber harus dibatasi dan biasanya digunakan ototransformator atau saklar Y- ∆ Seperti pada gambar 2.27 (b), akan tetapi berkurangnya arus akan berakibat berkurangnya kopel mula30. Bentuk dari rotor sangkar seperti pada gambar 2.28.
26
Dasar Teknik Tenaga Listrik dan Elektronika Daya, (Jakarta,2009), hal. 105 27 Ibid, hal. 118 28 Ibid, hal. 119 29 Ibid, hal. 118 30 Ibid, hal. 119
(a) (b)
Gambar 2.27 (a) Rotor sangkar (b) Sakelar STAR-DELTA31 .
Gambar 2.28 Rotor sangkar32
Pengaturan kecepatan pada motor induksi dapat dilakukan dengan beberapa cara yaitu :
• Mengubah jumlah kutub
Mengubah jumlah kutub motor akan mempengaruhi besarnya putaran sesuai dengan
p f ns 2 120 = . dimana : P = Jumlah kutub f = Frekuensi s
n = Putaran medan magnet stator
31
Ibid, hal. 118 32
Seperti pada rumus diatas apabila mengubah jumlah kutub maka akan merubah kecepatan n . s
Gambar 2.29 Perubahan lilitan stator dari 2 kutub menjadi 4 kutub33
• Mengubah frekuensi jala-jala
Pengaturan putaran motor induksi dengan mengubah-ubah frekuensi dilakukan dengan menggunakan solid state frequency converter34. Akan tetapi untuk menjaga keseimbangan kerapatan fluks, perubahan tegangan harus dilakukan bersamaan dengan perubahan frekuensi35.
• Mengatur tegangan jala-jala
( )
(
)
(
)
2 2 2 2 2 2 2 2 2 1 3 X a S R a R Sa v w T + =Dari persamaan diatas terlihat hubungan antara kopel motor induksi sebanding dengan pangkat dua tegangan yang diberikan. Untuk karakteristik beban seperti ini terlihat pada gambar 2.25, kecepatan akan berubah dari n1 ke n2untuk tegangan masuk setengah tegangan mula, sehingga pengaturan tegangan jala-jala hanya menghasilkan pengaturan putaran motor yang terbatas36.
33
Dasar Teknik Tenaga Listrik dan Elektronika Daya, (Jakarta,2009), hal 120. 34 Ibid, hal. 121 35 Ibid. 36 Ibid.
Gambar 2.30 Karakteristik Kopel-kecepatan pada pengaturan kecepatan motor dengan pengaturan tegangan jala-jala 37.
• Pengaturan Tahanan luar
Pengaturan tahanan luar seperti pada gambar 2.21 biasanya digunakan untuk mengatur kopel dan kecepatan pada motor rotor belitan. Seperti pada gambar 2.26, putaran akan berubah darin1ke dan n2dari n2 ke n3dengan bertambahnya tahanan luar yang dihubungkan ke motor.
Gambar 2.31 Karakteristik Kopel-kecepatan pada pengaturan kecepatan motor dengan penambahan tahanan luar38
2.2.2.6 Inverter (Variable Frequency Drive)
Inverter dapat dikatakan sebagai suatu power suplai konverter (merubah dari tegangan/frekuensi konstan menjadi tegangan/frekuensi yang dapat berubah) yang digunakan untuk motor39. Pada gambar 2.28 merupakan sebuah general-purpose inverter yang menggunakan power suplai AC (frekuensi 50Hz atau 60Hz) 37 Ibid. 38 Ibid, hal. 121 39
agar menghasilkan tegangan Bolak-balik yang dapat berubah, dibutuhkan frekuensi yang dapat diubah-ubah untuk mengatur speed motor40. Seperti terlihat pada gambar 2.26 Pada dasarnya Inverter secara umum terdiri dari :
Gambar 2.32 Basic configuration of Inverter41
2.2.2.6.1 Converter berfungsi untuk merubah tegangan komersial/power suplai AC menjadi tegangan searah (DC) 42.
2.2.2.6.2 Smoothing capacitor yang berfungsi untuk memperbaiki tegangan DC yang dihasilkan43.
2.2.2.6.3 Inverter berfungsi untuk mengubah tegangan DC ke tegangan AC Variable AC dengan variable frekuensi44.
2.2.2.6.4 Control circuit dimana bagian bagian ini utamanya adalah untuk mengontrol part inverter45.Pengontrolan speed dapat menggunakan signal Analog, digital atau bahkan melalui komunikasi data.
Gambar 2.33 berikut ini merupakan Diagram Bagian Inverter secara umum.
40 Ibid. 41
Inverter Beginner's Course, Mitsubishi electric, hal. 2-1 42 Ibid. 43 Ibid. 44 Ibid. 45 Ibid.
Gambar 2.33 Diagram Bagian Inverter secara umum46
Penamaan secara umum untuk power suplai input untuk tiga fasa adalah R,S dan T. Penamaan terminal Motor adalah U,V dan W. Sedangkan B1 dan B2 merupakan terminal untuk Brake resistor.
2.2.2.7 Counter
Counter adalah alat yang digunakan untuk menampilkan suatu proses penghitungan. Counter bekerja sebagai penghitung ketika suatu tegangan dimasukan ke input counter. Satu hitungan counter merupakan satu sinyal input 1
lalu 0. Counter dapat menghitung secara naik (up counter) yaitu dari nol dan seterusnya, dan secara turun (down counter) yaitu suatu nilai tertentu kemudian menuju ke nol. Counter pada mesin ini digunakan untuk menghitung jumlah air yang akan digunakan untuk membuat adukan.
Gambar 2.34 Skematik diagram Counter
Gambar 2.35 Contoh counter tipe FX4S47
46
Katalog LG Starvert iG5A 47
Katalog Autonics
2.2.2.8 Relay
Relay adalah peralatan yang digunakan untuk menghubungkan atau memutuskan rangkaian listrik. Prinsip kerjanya sama dengan kontaktor yaitu berdasarkan elektromagnetik, hanya jika pada relay kontaknya lebih kecil dan sebagai alat bantu pensaklaran pada rangkaian kontrol sebagai kontrol bantu. Relay ada yang mempunyai dua kontak Change Over (CO) dan ada pula yang mempunyai empat kontak CO.
Gambar 2.36 Skematik diagram Relay
Gambar 2.37 Relay Model 4 Pole tipe MY4N OMRON48
2.2.2.9 Kontaktor
Kontaktor merupakan suatu alat yang digunakan untuk switching ( pensaklaran) beban dalam hal ini terutama motor-motor listrik. Cara kerjanya, bila terminal koil kontaktor diberi tegangan maka magnet yang dihasilkan koil akan menarik mekanis kontak NO sehingga kontak tersambung untuk mengalirkan daya kebeban, apabila koil kontaktor tidak diberi suplai tegangan maka kontak-kontak tersebut kembali terbuka (NO) karena terdapat pegas pembalik didalam kontaktor tersebut. Pada dasarnya Kontaktor merupakan salah satu bentuk relay, perbedaannya terletak pada fakta bahwa istilah relay digunakan untuk perangkat yang menyambungkan arus kecil, kurang dari sekitar 10A, sedangkan istilah
48
Katalog MYSeries OMRON
A2 A1 2 (+) 10 (-) 11 6 1 4 3 5 7 8 9
kontaktor digunakan untuk sebuah perangkat penyambung arus cukup besar yang mampu menangani hingga beberapa ratus ampere49.
Gambar 2.38 Skematik diagram kontaktor 3 kutub + 1 NO50
Gambar 2.39 Bentuk fisik kontaktor tipe LC1D25M7 ( 3 POLE + 1NO 1NC ) 51
2.2.2.10 Lampu Tanda ( PILOT LAMP)
Lampu tanda adalah alat yang digunakan untuk memantau kondisi tertentu (gangguan atau kondisi kerja) yang diinginkan, misalnya untuk penunjukan fasa RST, power on, MCB trip dan sebagainya. Pilot lamp itu sendiri memiliki kode warna yang berbeda-beda. Untuk membedakan fungsinya maka digunakan kode warna. Kode warna pada lampu tanda bukan merupakan ketentuan yang mutlak harus diikuti. Seperti yang terlihat dalam tabel dibawah ini :
Gambar 2.40 Simbol Lampu tanda
49
Programmable Logic Controller Ed. 3, Gava, W. Bolton. Hal. 25 50 Katalog Telemecanique 51 Ibid X2 X1
Tabel 2.3 Arti Warna-warna Lampu Tanda Sumber : VDE 0113/12.73 and IEC Publ. 204, 1965
Warna Arti Contoh Aplikasi
Merah Tidak Normal/stop/off Mesin Stop karena aksi pengaman seperti overload atau karena kesalahan lain/emergency
switch
Kuning Peringatan Menunjukan harga variabel telah mencapai batas yang ditentukan Hijau Mesin siap distart Mensuplai rangkaian motor Putih Semua fungsi yang tak terliput
warna asal
Mesin bekerja, main switch pada posisi diatas (posisi 1)