4
BAB II
LANDASAN TEORI
2.1 Umum
Pada bab ini akan dijelaskan mengenai teori dasar yang melandasi permasalahan dan penyelesaian yang diangkat didalam tugas akhir ini. Teori dasar yang dijelaskan meliputi prinsip dasar kerja kompresor, klasifikasi kompresor, penggerak kompresor, transmisi daya poros kompresor, Programable Logic Control ( PLC ).
2.2 Pengetahuan Dasar Kompresor
Kompresor merupakan suatu mesin yang digunakan untuk memampatkan udara atau gas yang diisap dari atmosfer atau udara bebas. Bila suatu gas atau udara didalam suatu ruangan tertutup diperkecil volumenya maka udara atau gas tersebut akan mengalami kompresi, kompresor yang bekerja berdasarkan prinsip kerja tersebut disebut dengan kompresor perpindahan ( displacement ), yang secara prinsip dilukiskan seperti pada gambar 2.1
Sumber :Google Image (kerockan.blogspot.com)
Gambar 2.1 Prinsip Kerja Kompresor Displacement
Pada gambar 2.1 tersebut torak bergerak secara bolak balik didalam sebuah silinder dan berfungsi sebagai penghisap, penekan dan pendorong gas untuk keluar dari silinder secara berulang-ulang. Cincin torak yang dipasang pada torak berfungsi sebagai perapat dimana didalam kondisi atau proses kerja udara atau gas yang ditekan tidak boleh keluar atau bocor melalui celah antara dinding torak dan dinding silinder yang saling bergesekan.
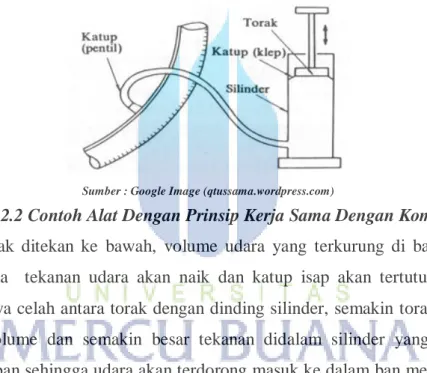
Didalam kehidupan sehari –hari kita dapat jumpai contoh nyata dari kompresor jenis displacement yaitu pada pompa ban sepeda ( seperti pada gambar 2.2 ), dimana pada alat ini bila kita menarik pegangan ke atas maka torak akan bergerak ke atas dan tekanan didalam silinder bawah torak akan menjadi negatif ( lebih kecil dari tekanan atmosfir atau udara luar ) sehingga udara akan masuk melalui celah katup isap yang terbuat dari kulit dan dipasang langsung pada torak juga berfungsi sebagai perapat torak.
Sumber : Google Image (qtussama.wordpress.com)
Gambar 2.2 Contoh Alat Dengan Prinsip Kerja Sama Dengan Kompresor
Apabila torak ditekan ke bawah, volume udara yang terkurung di bawah torak akan mengecil sehingga tekanan udara akan naik dan katup isap akan tertutup yang ditandai dengan merapatnya celah antara torak dengan dinding silinder, semakin torak di tekan maka semakin kecil volume dan semakin besar tekanan didalam silinder yang akan melebihi tekanan didalam ban sehingga udara akan terdorong masuk ke dalam ban melalui pentil yang berfungsi sebagai katup keluar. Kompresor jenis perpindahan ( displacement ) terbagi menjadi dua jenis berdasarkan pendorong yang digunakan di dalam silinder, yaitu kompresor jenis bolak-balik dan kompresor jenis putar ( rotary ).
2.2.1 Klasifikasi Kompresor
Secara umum Kompresor terbagi berdasarkan pada volume dan tekanan yang dihasilkan, sebutan kompresor dipakai untuk bertekanan tinggi, blower ( peniup ) untuk yang bertekanan agak rendah, sedang fan ( kipas ) untuk yang bertekanan sangat rendah. Namun biasanya kompresor terbagi berdasarkan cara pemampatannya yaitu kompresor jenis turbo dan kompresor jenis perpindahan atau displacement.
2.2.1.1 Kompresor Displacement Jenis Bolak Balik
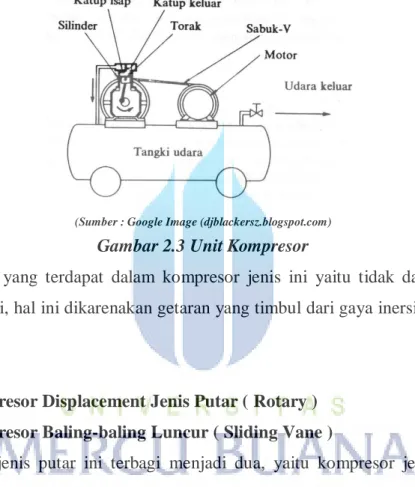
Pada umumnya setiap kompresor menggunakan motor sebagai prime mover atau penggerak utama, motor tersebut dihubungkan dengan poros engkol dimana katup isap dan katup keluar dipasang pada kepala silinder. Tangki udara yang digunakan pada kompresor jenis ini berfungsi sebagai penyimpan energi dan dapat disamakan dengan ban pada implementasi pompa ban. Gambar 2.3 merupakan gambaran sebuah unit kompresor displacement jenis bolak-balik.
(Sumber : Google Image (djblackersz.blogspot.com)
Gambar 2.3 Unit Kompresor
Kekurangan yang terdapat dalam kompresor jenis ini yaitu tidak dapat dioperasikan pada putaran tinggi, hal ini dikarenakan getaran yang timbul dari gaya inersia saat kompresor tersebut bekerja.
2.2.1.2 Kompresor Displacement Jenis Putar ( Rotary ) 2.2.1.2.a Kompresor Baling-baling Luncur ( Sliding Vane )
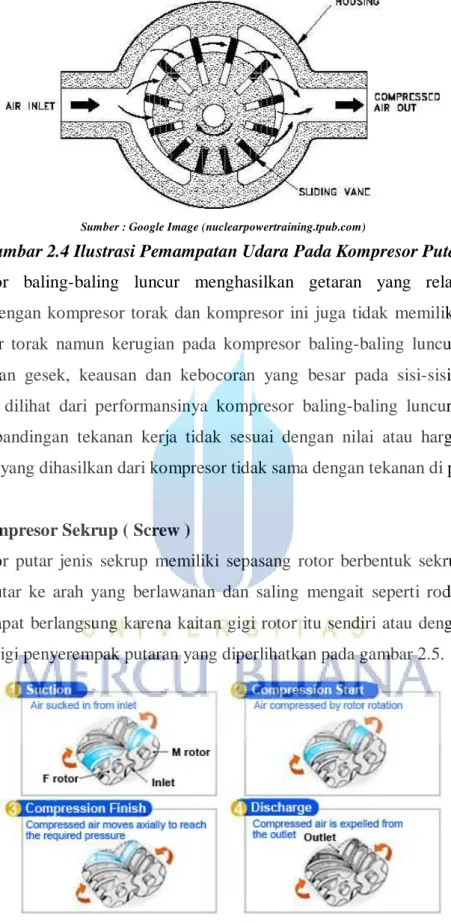
Kompresor jenis putar ini terbagi menjadi dua, yaitu kompresor jenis baling-baling luncur dan kompresor jenis sekrup ( screw ). Kompresor baling-baling luncur memiliki sebuah rotor berbaling-baling dan berputar di dalam stator berbentuk silinder, rotor dipasang secara eksentrik ( tidak bersumbu ) terhadap silinder. Baling-baling dipasang pada alur-alur disekeliling rotor dan ditekan ke dinding silinder oleh pegas didalam alur. Jika rotor berputar maka sumbu baling-baling akan ikut berputar sambil meluncur dipermukaan dalam dinding silinder.
Sumber : Google Image (nuclearpowertraining.tpub.com)
Gambar 2.4 Ilustrasi Pemampatan Udara Pada Kompresor Putar
Kompresor baling-baling luncur menghasilkan getaran yang relatif kecil bila dibandingkan dengan kompresor torak dan kompresor ini juga tidak memiliki katup seperti pada kompresor torak namun kerugian pada kompresor baling-baling luncur terletak pada masalah kerugian gesek, keausan dan kebocoran yang besar pada sisi-sisi baling-baling, sedangkan jika dilihat dari performansinya kompresor baling-baling luncur akan menjadi buruk jika perbandingan tekanan kerja tidak sesuai dengan nilai atau harga optimumnya artinya tekanan yang dihasilkan dari kompresor tidak sama dengan tekanan di pipa keluar.
2.2.1.2.b Kompresor Sekrup ( Screw )
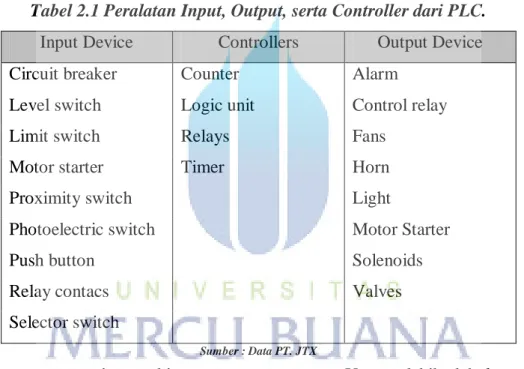
Kompresor putar jenis sekrup memiliki sepasang rotor berbentuk sekrup yang secara serempak berputar ke arah yang berlawanan dan saling mengait seperti roda gigi. Putaran serempak ini dapat berlangsung karena kaitan gigi rotor itu sendiri atau dengan perantaraan sepasang roda gigi penyerempak putaran yang diperlihatkan pada gambar 2.5.
Sumber : www.hitachi-pt.com
Gambar 2.5 Ilustrasi Putaran Roda Gigi.
Pada gambar tersebut digambarkan aliran udara yang berada di dalam silinder seolah- olah di dorong oleh rotor berbaling-baling dimana semua tinggi baling-baling adalah tetap.
Sedangkan azas pemampatan gas atau udara dalam kompresor sekrup digambarkan dalam bentuk panah, dimana gas atau udara yang berada dalam ruang baling-baling tersebut belum mengalami kompresi sewaktu dari inlet, namun setelah gas atau udara di keluarkan ke outlet yang memiliki tekanan lebih barulah terjadi kompresi.
Kerugian pada kompresor jenis sekrup terletak pada performansinya yang akan menurun cepat bila di operasikan pada perbandingan tekanan yang tinggi, selain itu karena proses kompresi tidak dilakukan di dalam silinder maka kompresor ini akan menghasilkan pulsasi dan bunyi yang besar. Konstruksi dan rotor kompresor screw diperlihatkan pada gambar berikut.
( a )
( b )
Sumber : (a) www.atlascopco.com (b) Google Image (www.classzero.com)
Gambar 2.6 (a) Konstruksi Kompresor Screw (b) Rotor Kompresor Screw
2.2.1.3 Kompresor Turbo ( Centrifugal )
Prinsip kerja kompresor jenis turbo yaitu menaikkan tekanan dan kecepatan gas atau udara didalam silinder dengan gaya sentrifugal yang diimbulkan oleh impeller, atau dengan gaya angkat ( lift ) yang ditimbulkan oleh baling-baling. Impeller yang digunakan pada kompresor turbo digerakkan oleh motor listrik dan dihubungkan langsung pada rotor motor tersebut, gambar berikut memperlihatkan konstruksi dari kompresor turbo.
Sumber : www.jplcompressor.com
Gambar 2.7 Konstruksi Kompresor Turbo ( Centrifugal )
2.2.2 Penggerak Kompresor
Jika pada pompa ban, torak digerakkan secara manual oleh penggerakkan tuas yang mengikuti pergerakkan tangan, namun pada kompresor umumnya menggunakan motor sebagai alat penggerak dari torak maupun baling-baling. Motor yang digunakan biasanya beragam dan memiliki konstruksi yang disesuaikan dengan kompresor itu sendiri, dalam pengaplikasiannya kompresor menggunakan dua jenis motor yaitu motor listrik dan motor bakar torak ( motor berbahan bakar ).
2.2.2.1 Motor Listrik
Motor listrik dapat dikelompokkan secara kasar atas motor induksi ( motor asinkron ) dan motor sinkron. Arus awal suatu motor induksi sangatlah besar namun karena harga yang relatif murah dan pemeliharaannya yang mudah motor jenis ini banyak sekali diimplementasikan dibanding motor sinkron meskipun pada motor sinkron memiliki factor daya dan efisiensi yang tinggi.
Berdasarkan jenis rotor yang digunakan motor induksi terbagi menjadi dua jenis, yaitu motor rotor sangkar tupai ( squirrel cage ) dan motor rotor lilit ( wound rotor ).
Sumber : Goole Image (www.learn-about-electronics.com)
Gambar 2.8 Rotor Motor Induksi.
2.2.2.2 Motor Bakar Torak
Motor bakar torak biasanya digunakan sebagai penggerak kompresor bila tidak tersedia sumber listrik di tempat pemasangannya atau bila kompresor tersebut merupakan kompresor portable. Untuk motor bakar torak berbahan bakar bensin dapat dipakai pada kompresor berdaya kecil sampai 5,5 kW dan untuk pengunaan daya yang lebih besar ( diatas 5,5 kW ) dapat digunakan motor berbahan bakar diesel.
2.2.3 Transmisi Daya Poros Kompresor
Untuk mentransmisikan ( mengirim ) daya dari rotor pada motor ke poros kompresor ada beberapa cara yaitu jika penggerak menggunakan motor listrik maka transmisinya dapat menggunakan sabuk-V ( V-belt ), kopling tetap, dan rotor terpadu. Untuk penggerak dengan motor bakar torak maka dapat menggunakan transmisi berupa sabuk –V, kopling tetap atau kopling gesek.
2.2.3.1 Sabuk-V ( V-belt )
Keuntungan menggunakan cara transmisi ini adalah pada putaran kompresor yang dapat dipilih bebas sehingga dapat dipakai motor putaran tinggi. Dan kerugian bila mengaplikasikan sistem transmisi ini ialah dapat menimbulkan kerugian daya yang disebabkan oleh slip antara puli dan sabuk, serta kebutuhan ruangan yang lebih besar untuk pemasangan. Namun sistem transmisi ini biasanya digunakan untuk kompresor berukuran kecil dengan daya kurang dari 75 kW.
2.2.3.2 Kopling Tetap
Transmisi dengan kopling tetap memberikan efisiensi keseluruhan yang tinggi serta pemeliharaan yang mudah. Tapi kerugian dari sistem transmisi ini yaitu mudah memerlukan motor dengan putaran rendah, dan biasanya motor dengan putaran rendah memiliki harga yang mahal. Karena itu, cara ini hanya sesuai diterapkan pada kompresor berdaya antara 150 sampai 450 kW.
2.2.3.3 Rotor Terpadu ( Direct Rotor )
Transmisi ini menggunakan poros engkol kompresor menjadi satu dengan poros motor, sehingga ukuran mesin menjadi lebih ringkas dan tidak memerlukan banyak ruang.
Pemeliharaan transmisi ini lebih mudah namun memerlukan jenis motor yang didesain atau dibuat secara khusus.
2.2.3.4 Kopling Gesek
Cara ini dipakai untuk mengerakkan kompresor kecil dengan motor bakar torak, dimana motor dapat distart tanpa beban dengan membuka hubungan kopling. Namun untuk jenis kompresor dengan fluktuasi momen puntir yang besar diperlukan kopling yang dapat meneruskan momen puntir yang besar pula.
2.3 Programmable Logic Control ( PLC )
Programmable Logic Control atau yang biasa disebut PLC merupakan suatu alat yang beroperasi secara digital dengan menggunakan programmable memori untuk menyimpan berbagai macam instruksi fungsi spesifik seperti logika, timing, sekuensial, alogritma dan counting untuk mengendalikan secara analog ataupun digital input atau output sebagai tipe mesin. Keberadaan PLC merupakan tuntutan akan kebutuhan suatu sistem kontrol yang murah, dapat digunakan untuk segala kondisi dan mudah dalam pengoperasiannya, PLC didesain untuk menggantikan hardware relay dan timer logic dengan menggunakan sistem kontrol berdasarkan CPU ( Central Processing Unit ) yang menggunakan perangkat keras dan memori untuk mengendalikan proses, didalam progam PLC sendiri sudah terdapat fungsi internal seperti timer, counter dan shift register.
CPU yang terdapat pada PLC berfungsi sebagai pusat hubungan dari setiap blok diagram ( input device, controller, output device ) untuk menerima sinyal memasukan dari peralatan input yang dinamai Input Device yang masuk ke PLC, sinyal input yang masuk PLC tersebut dinamakan input point, dimana input point ini ditempatkan dalam lokasi
memori yang telah ditentukan statusnya on atau off. Lokasi memori ini biasanya disebut dengan bit, CPU dalam suatu siklus proses normal akan memantau status keadaan dari input point dan menjalankan on atau off sesuai dengan input bitnya. Demikian pula dengan output bit dalam memori dimana output point pada unit yang telah ditentukan mengirim sinyal output kepada output device. Output bit akan on untuk mengirimkan sebuah sinyal ke peralatan output melalui output point dan CPU secara periodik menjalankan output point on atau off sesuai dengan status dari output bitnya.
Penggunaan PLC dan berbagai macam komponen peralatan I / O device yang digunakan pada suatu rangkaian untuk mengontrol sistem eksternal dinamakan dengan sistem kontrol. Pada tabel 2.1 diperlihatkan sensor atau komponen-komponen yang termasuk di dalam input device, controller dan output device.
Tabel 2.1 Peralatan Input, Output, serta Controller dari PLC.
Input Device Controllers Output Device
Circuit breaker Counter Alarm
Level switch Logic unit Control relay
Limit switch Relays Fans
Motor starter Timer Horn
Proximity switch Light
Photoelectric switch Motor Starter
Push button Solenoids
Relay contacs Valves
Selector switch
Sumber : Data PT. JTX
Dalam pengoperasiannya biasanya pengguna atau User terlebih dahulu menentukan program yang akan dieksekusi atau dijalankan oleh PLC, program ini biasanya berbentuk diagram tangga atau sering disebut dengan Ladder Diagram. Penggunaan PLC banyak diaplikasikan pada sistem kontrol berbagai proses pengepakkan, penanganan bahan, perakitan otomatis dan sebagainya. Dengan kata lain, hampir semua aplikasi yang memerlukan kontrol listrik atau elektronik membutuhkan PLC.
Bila ditinjau dari segi fungsi PLC, maka kita dapat melihat beberapa kelemahan dari penggunaan sistem kontrol konvensional, antara lain :
Perlu kerja keras saat melakukan proses pengkabelan
Terdapat kesulitan saat dilakukan penggantian dan, atau perubahan
Kesulitan saat dilakukan pelacakan kesalahan ( Troubleshooting )
Saat terjadi masalah biasanya memakan waktu yang lama dan tidak menentu
Sedangkan dengan penggunaan sistem kontrol menggunakan PLC, kita dapat melihat beberapa keunggulan seperti :
Jumlah kabel yang dibutuhkan dapat dieliminir atau dikurangi hinga sekitar ±80 %
PLC mengkonsumsi daya yang relatif lebih rendah dibandingkan dengan sistem kontrol menggunakan relay ( konvensonal )
Fungsi diagnostik pada sebuah kontroler PLC memungkinkan pendeteksian kesalahan yang mudah dan cepat
Perubahan pada sebuah aplikasi atau proses dapat dilakukan dengan mudah ( hanya dengan merubah suatu program ), melalui sebuah alat pemrogram khusus ( mini programmer unit ) atau komputer PC, seperti pada gambar 2.14
Tidak membutuhkan spare partyang banyak
Lebih murah bila dibandingkan menggunakan sistem kontrol konvensional, khususnya didalam penggunaan instrumen I / O yang cukup banyak dan fungsi operasional memiliki kompleksitas yag tinggi
Ketahanan PLC jauh lebih baik bila dibandingkan dengan relay automekanik
Kemampuan PLC beroperasi pada lingkungan yang keras
PLC tahan terhadap noise dan memiliki fluktuasi temperatur yang besar (0°C - 60°C)
Konstruksi plug in yang memungkinkan penggantian atau penambahan unit input atau output secara mudah ( khusus untuk PLC berbentuk rack )
Bahasa pemrogaman yang mudah dipahami
Kemudahan pemrogaman dan pemrograman ulang
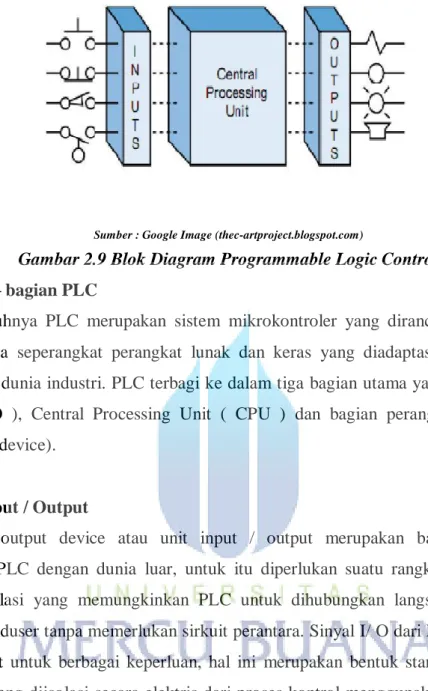
Blok diagram PLC secara umum dapat kita lihat pda gambar 2.9 dan pada gambar 2.14 (a) diperlihatkan pemrograman pada PLC yang dilakukan dengan menggunakan komputer PC sedang pada gambar 2.14 (b) diperlihatkan alat pemrogram PLC yang disebut mini programme unit.
Sumber : Google Image (thec-artproject.blogspot.com)
Gambar 2.9 Blok Diagram Programmable Logic Control 2.3.1 Bagian – bagian PLC
Sesungguhnya PLC merupakan sistem mikrokontroler yang dirancang khusus untuk industri, artinya seperangkat perangkat lunak dan keras yang diadaptasi untuk keperluan aplikasi dalam dunia industri. PLC terbagi ke dalam tiga bagian utama yaitu : bagian input / output ( I / O ), Central Processing Unit ( CPU ) dan bagian perangkat pemrograman (programming device).
2.3.1.1 Input / Output
Input / output device atau unit input / output merupakan bagian penghubung mikroelektrik PLC dengan dunia luar, untuk itu diperlukan suatu rangkaian pengkodisian sinyal dan isolasi yang memungkinkan PLC untuk dihubungkan langsing pada actuator proses dan tranduser tanpa memerlukan sirkuit perantara. Sinyal I/ O dari PLC dikonversikan pada I / O unit untuk berbagai keperluan, hal ini merupakan bentuk standart dari berbagai saluran I / O yang diisolasi secara elektris dari proses kontrol menggunakan opto isolator I / O modul.
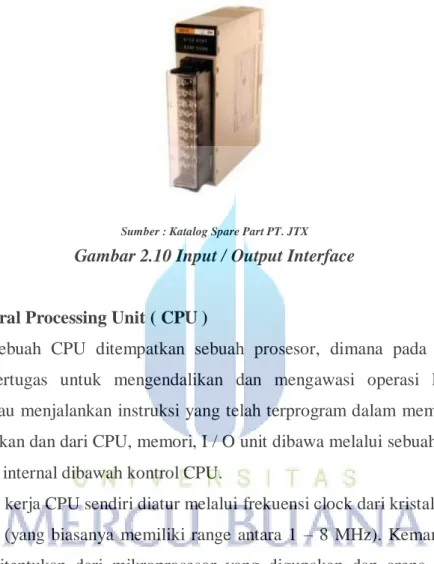
Setiap PLC, I / O point terletak pada suatu tempat yang semua input dan output dari suatu tipe adalah sama. Ini dikarenakan supply dari pembuat ( maker ) adalah untuk fungsi standar dengan tujuan agar lebih ekonomis, dalam berbagai kasus, unit I / O dibuat untuk memudahkan hubungan proses anatara tranduser dengan actuator ke PLC. Berdasarkan tujuan tersebut semua PLC dibuat dengan terminal atau I / O interface yang telah distandarisasi ( seperti ditunjukkan pada gambar 2.10 ), sehingga memudahkan dan menyederhanakan pelepasan serta penggantian I / O card yang mengalami gangguan atau rusak ( error ).
Setiap I / O poin mempunyai suatu alamat ( addres ) tersendiri atau nomor saluran yang digunakan selama pembuatan ataupun pengembangan suatu program untuk menentukan pengawasan I / O dalam program tersebut. Indikasi kondisi dari saluran I / O dilakukan dengan bantuan LED yang terdapat pada PLC sehingga pengawasan I / O PLC dalam membangun suatu program dapat dengan mudah dikontrol.
Sumber : Katalog Spare Part PT. JTX
Gambar 2.10 Input / Output Interface
2.3.1.2 Central Processing Unit ( CPU )
Didalam sebuah CPU ditempatkan sebuah prosesor, dimana pada saat operasinya (PLC), CPU bertugas untuk mengendalikan dan mengawasi operasi PLC pada saat mengeksekusi atau menjalankan instruksi yang telah terprogram dalam memorinya ( CPU ).
Informasi yang akan dan dari CPU, memori, I / O unit dibawa melalui sebuah bus sistem atau jalur komunikasi internal dibawah kontrol CPU.
Pengaturan kerja CPU sendiri diatur melalui frekuensi clock dari kristal waktu eksternal atau isolator RC (yang biasanya memiliki range antara 1 – 8 MHz). Kemampuan frekuensi clock tersebut ditentukan dari mikroprosesor yang digunakan dan arena penggunaannya.
Clock menggambarkan kecepatan operasi PLC dan menyediakan pewaktu atau sinkronisasi untuk berbagai elemen sistem. Secara garis besar CPU terdiri dari 3 komponen utama yaitu : prosesor, sistem memori, sistem power supply.
Secara garis besar prinsip kerja CPU dapat kita simpulkan ke dalam tiga bagian, yaitu :
Membaca : CPU akan membaca atau menerima data dari input device yang terletak di luar sistem PLC melalui input inteface
Menjalankan : CPU akan menjalankan kontrol program yang telah disimpan pada sistem memori
Menulis : CPU akan menambahkan perbaikan – perbaikan data terbaru untuk kondisi dari sebuah output device melalui output interface
Berikut ini merupakan sebuah gambaran CPU unit dari sebuah PLC :
Sumber : Katalog Spare Part PT. JTX
Gambar 2.11 CPU Unit PLC Omron Sysmac C200HE.
2.3.1.2.a Prosesor
Sistem CPU yang ada pada saat ini umumnya menggunakan mikro, dalam beberapa PLC betipe besar ada yang menggunakan mikroprosesor tambahan untuk mengontrol penggunaan waktu yang kompleks. Prosesor yang terdapat pada PLC mempunyai fungsi untuk menyimpan dan menjalankan program yang telah disimpan pada sistem memori PLC.
Umumnya prosesor bekerja berdasarkan pada memori yang menyimpan program untuk kondisi I /O terbaru. Kondisi input disimpan didalam input tabel yang merupakan bagian dari memori prosesor, dimana setiap satu modul input dibagian I / O telah ditentukan satu lokasi tersendiri dalam input image tabel untuk mencatat kondisi akhir dari suatu output, dimana kondisi input dan output adalah beda.
Arah aliran informasi pada CPU ketika akan mengambil instruksi dai memori user program ke dalam CPU adalah sebagai berikut :
Mengambil informasi I / O dari image dan data numerik dari variabel data memori
Menjalankan instruksi
Pembuatan keputusan logic mengenai keadaan yang sebenarnya dari output dan muncul dalam output tabel
Lokasi yang terdapat pada I / O dari image modul dikenali dengan alamat, masing – masing lokasi memiliki alamat yang berbeda, dan setiap PLC memiliki metode tersendiri didalam menentukan sebuah alamat – alamat.
Bagian memori prosesor hanya digunakan untuk menyimpan instruksi – instruksi user program. Sebelum PLC mulai beraktifitas, user harus memasukan kode-kode instruksi yang merupakan user program dan cara ini disebut dengan programming.
2.3.12.b Memori
Memori merupakan suatu elemen yang berupa IC ( Integral Circuit ). Karakter dari memori ini dapat dengan mudah dihapus hanya dengan mematikan catu daya. Memori digolongkan ke dalam beberapa beberapa tipe yaitu :
RAM ( Random Acces Memory ), merupakan tipe memori yang fleksibel artinya dapat membaca atau menulis data yang digunakan untuk menyimpan suatu program
ROM ( Read Only Memory ), merupakan tipe memori yang hanya dapat dibaca data yang terdapat didalamnya, namun tidak dapat ditulisi karena termasuk data non volatile yang tersedia secara permanen
EPROM ( Erasable Programmable Only Memory ), merupakan jenis memori yang dapat diprogram secara elektis dan dihapus dengan menggunakan sinar ultraviolet dan termasuk jenis media penyimpan yang permanen untuk ladder program
2.3.1.2.c Power Supply
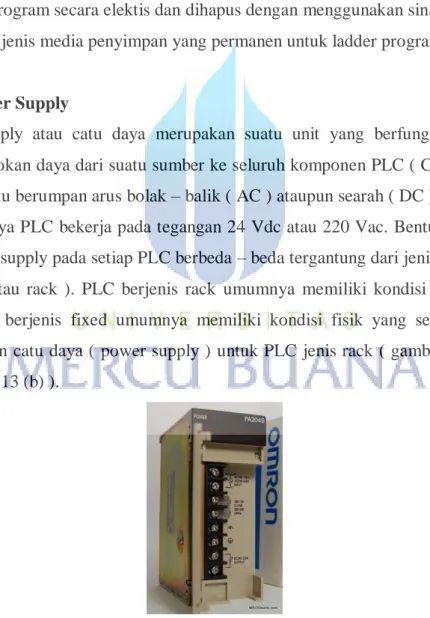
Power supply atau catu daya merupakan suatu unit yang berfungsi khusus untuk memberikan pasokan daya dari suatu sumber ke seluruh komponen PLC ( CPU,Memori,I /O Interface ) baik itu berumpan arus bolak – balik ( AC ) ataupun searah ( DC ). Untuk nominal tegangan, biasanya PLC bekerja pada tegangan 24 Vdc atau 220 Vac. Bentuk fisik dari catu daya atau power supply pada setiap PLC berbeda – beda tergantung dari jenis PLC itu sendiri ( bentuk fixed atau rack ). PLC berjenis rack umumnya memiliki kondisi fisik yang besar sedangkan yang berjenis fixed umumnya memiliki kondisi fisik yang sedang atau kecil.
Berikut gambaran catu daya ( power supply ) untuk PLC jenis rack ( gambar 2.13 (a) ) dan fixed ( gambar 2.13 (b) ).
Sumber : Katalog Spare Part PT. JTX
Gambar 2.12 (a) Power Supply PLC Jenis Rack.
Sumber : Katalog Spare Part PT. JTX
Gambar 2.12 (b) Power Supply PLC Jenis Fixed.
Umumnya pengguna harus menentukan besar nilai arus yang diambil dari modul keluaran atau masukan untuk memastikan catu daya yang bersangkutan menyediakan sejumlah arus yang memang dibutuhkan. Biasanya tipe modul yang berbeda akan menyediakan sejumlah arus listrik yang berbeda.
Catu daya listrik ini biasanya tidak digunakan untuk memberikan catu daya langsung ke dalam masukkan atau keluaran, yang artinya masukkan dan keluaran murni merupakan saklar ( baik relay ataupun opto isolator ). Pengguna atau User harus menyediakan catu daya yang terpisah untuk memasukkan atau keluaran pada PLC. Degan demikian maka lingkungan industri dimana PLC tersebut digunakan tidak akan merusak PLC itu sendiri karena memiliki catu daya terpisah dengan memasukkan atau keluarannya.
2.3.2 Instruksi Pemrograman
Untuk memudahkan memasukkan program ke dalam sebuah PLC tentukan terlebih dahulu daftar seluruh peralatan input dan output beserta lokasi I /O bitnya dan penempatan lokasi word dalam penulisan data.
Didalam memrogram suatu PLC, alangkah baiknya bila mengenal atau mengetahui terlebih dahulu tentang organisasi memori yang terdapat didalamnya. Ilustrasi dari organisasi memori yaitu sebagai peta memori ( memory map ) yang space atau ruangnya terdiri dari kategori user programmable dan data tabel.
User program adalah suatu program Logic Ladder dimana ia dimasukkan dan disimpan yang berupa instruksi – instruksi dalam format Logic Ladder. Setiap instruksi memerlukan satu word didalam memori. Data tabel terbagi ke dalam dua kategori yaitu status data dan numbers atau codes. Status data merupakan informasi on / off yang dipresentasikan sebagai
“I” atau “O” , yang disimpan didalam bit location. Sedangkan informasi number atau code dipresentasikan sebagai group bit dari yang dalam byte atau word location. Data tabel dibagi
menjadi tiga seksi tergantung menurut jenis informasinya, yaitu input image, timer dan counter storage. Ilustrasi dari memori map dapat dilihat pada tabel 2.2 berikut ini.
Tabel 2.2 PLC Memori Map TABEL DATA
PROGRAM UTAMA SUB
RUTIN PROGRAM PEMAKAI
DAERAH PENYIMPANAN PESAN
Sumber : Manual Book PLC Omron di PT. JTX
Dari tabel input dan otput, maka dapat dilihat bahwa dalam mengerjakan suatu program, prosesor akan membaca semua inputan yang mana proses tersebut dinamakan program scan. Penulisan program dilakukan dalam bentuk ladder diagram dengan menggunakan bantuan PC ( Syswin Software ) atau dengan kode mneumonic dengan menggunakan Programming Console.
( a )
( b )
Sumber : Katalog Spare Part PT. JTX
Gambar 2.13 (a) Penggunaan PC Untuk Menulis Program Pada PLC.
(b) Programming Console.
2.3.3 Instruksi Dasar
Instruksi dasar pada PLC biasanya terdiri dari LOAD, LOAD NOT, AND, AND NOT, OR, OR NOT. Dan biasanya penulisan instruksi-instruksi tersebut didalam bentuk ladder diagram diwakili oleh suatu gambar identitas masing-masing.
Sumber : Manual Book PLC Omron di PT. JTX
Gambar 2.14 Instruksi Dasar PLC 2.3.4 Ladder Diagram dan Mneumonic Code
Ladder Diagram atau diagram tangga terdiri dari garis vertikal ke bawah yang terletak pada bagian kiri diagram dan memiliki cabang berupa garis horizontal ke kanan. Garis vertikal yang terletak pada bagian kiri biasanya disebut busbar, garis instruksi, garis cabang atau anak tangga.
Garis instruksi tersebut dikondisikan sebagai pusat dari semua instruksi – instruksi ladder diagram yang terdapat di bagian kanan dari tiap – tiap jalur diagram, sedangkan pembacaan logika untuk tiap-tiap rangkaian ditentukan dengan cara bagaimana rangkaian tersebut dijalankan mulai dari kiri ( garis instruksi ) ke kanan ( simbol output ). Gambaran ladder diagram diperlihatkan pada gambar 2.15 dibawah ini :
A
LOAD
A
LOAD NOT
A B
AND
A B
AND NOT A
B
OR
B
OR NOT A
Sumber : Print Screen CX Programmer v 9.0 PLC Omron di PT. JTX
Gambar 2.15 Ladder Diagram PLC.
Gambar idatas memperlihatkan bahwa tiap-tiap cabang yang terdapat pada setiap jalur instruksi dapat dipisah atau berdiri sendiri dan dapat pula digabungkan, dan setiap garis vertikal yang terdapat pada jalur instruksi dinamakan dengan kondisi.
Kondisi yang tidak dilengkapi dengan garis diagonal dinamakan kondisi Normally Open ( NO ) biasanya kondisi tersebut berlaku pada instruksi LD, AND, dan OR, sedangkan kondisi yang dilengkapi dengan garis diagonal dinamakan kondisi Normally Close ( NC ) yang biasanya berlaku pada instruksi LD NOT, AND NOT dan OR NOT.
Angka – angka yang tertera pada setiap kondisi mengindikasikan operand bit pada masing-masing instruksi, angka-angka tersebut juga mengindikasikan kondisi setiap status bit pada rangkaian yang akan menentukan program ketika dieksekusi ( running program ) agar sesuai dengan perintah yang diinginkan. Setiap kondisi pada suatu ladder diagram sebenarnya terdiri dari ON dan OFF tergantung pada status operand bit yang dituliskan untuk suatu program ( ladder diagram ), kondisi normally open akan ON bila status operand bit adalah ON, dan akan OFF ketika operand bit berstatus OFF.
Sedangkan pada kondisi normally close akan berstatus ON ketika operand bit berstatus OFF dan akan OFF bila operand bit berstatus ON. Umumnya, kondisi normally open ( NO) digunakan pada saat akan melihat nilai dari suatu bit yang bekerja ( ON ) ketika program tersebut dieksekusi atau dijalankan, dan sebaliknya untuk kondisi normally close ( NC ) digunakan pada saat akan melihat nilai dari suatu bit yang mati ( OFF ) ketika program tersebut diberhentikan ( stop ).
Sumber : Manual Book PLC Omron di PT. JTX
Gambar 2.16 Kondisi Normally Open dan Normally Closed.
Untuk menulis suatu program ke dalam PLC dengan menggunakan programming console maka terlebih dahulu ledder diagram sebuah instruksi terlebih dahulu diubah ke dalam bentuk table yang biasa disebut mneumonic code. Didalam penulisan program dalam bentuk mneumonic code ada beberapa hal yang harus diperhatikan yaitu : penulisan program dengan bentuk ini sangat tidak efektif untuk program yang memiliki tingkat kekompleksan yang tinggi dan sangat disarankan untuk user pemula untuk tidak membuat program dalam bentuk ini, tabel mneumonic code terdiri dari tiga tabel ( pada tipe PLC OMRON ) yaitu :
Addres : kolom untuk menentukan alamat dari suatu bit operand.
Instruction : kolom untuk menandakan jenis instruksi logika yang digunakan pada suatu bit operand.
Operand : kolom untuk menentukan jenis keluaran dari suatu cabang instruksi.
Sedangkan baris pada suatu table mneumonic code, untuk menentukan jumlah dari keseluruhan alamat yang ada pada satu rangkaian program penuh.
Tabel 2.3 Mneumonic Code.
Addres Instruction Operands
00000 LD 100
00001 AND 002
00002 OR 200
00003 AND LD -
00004 AND NOT 110
00005 AND LD 200
Sumber : Manual Book PLC Omron di PT. JTX
Normally Open Condition
Instruction A
Normally Closed Condition
Instruction B
2.3.5 LOAD dan LOAD NOT
Untuk mengawali suatu kondisi logika dalam setiap penulisan instruksi dimulai dengan LOAD atau LOAD NOT, contoh penggunakan didalam ladder diagram adalah sebagai berikut :
Sumber : Manual Book PLC Omron di PT. JTX
Gambar 2.17 Penggunaan Instruksi Logika LOAD dan LOAD NOT.
Tabel 2.4 Mneumonic Code Instruksi LOAD Dan LOAD NOT.
Addres Instruction Operands
00000 LD 000
00001 Instruction
00002 LD NOT 000
00003 Instruction
Sumber : Manual Book PLC Omron di PT. JTX
2.3.6 AND dan AND NOT
Instruksi logika ini digunakan untuk membuat hubungan seri diantara dua instruksi logika didalam suatu instruksi ladder diagram, biasanya penulisannya setelah instruksi LOAD atau LOAD NOT, contoh penggunaan dalam ladder diagram :
Sumber : Manual Book PLC Omron di PT. JTX
Gambar 2.18 Penggunaan Instruksi Logika AND dan AND NOT Dalam Suatu Ladder Diagram.
A LOAD INSTRUCTION 000
000
A LOAD NOT INSTRUCTION
000 100 LR 00
Instruction
Tabel 2.5 Mneumonic Code Instruksi AND Dan AND NOT.
Addres Instruction Operands
00000 LD 000
00001 AND NOT 100
00002 AND LR 00
00003 Instruction
Sumber : Manual Book PLC Omron di PT. JTX
2.3.7 OR dan OR NOT
Instruksi Logika yang digunakan untuk membuat hubungan pararel antara dua instruksi logika atau lebih didalam satu garis instruksi, contoh penggunaan dalam ladder diagram :
Sumber : Manual Book PLC Omron di PT. JTX
Gambar 2.19 Penggunaan Instruksi Logika OR dan OR NOT Dalam Suatu Ladder Diagram.
Tabel 2.6 Mneumonic Code Instruksi OR Dan OR NOT.
Addres Instruction Operands
00000 LD NOT 000
00001 OR NOT 100
00002 OR LR 00
00003 Instruction
Sumber : Manual Book PLC Omron di PT. JTX
2.3.8 Kombinasi Logika AND, AND NOT, OR atau OR NOT
Ketika instruksi logika AND, AND NOT, OR atau OR NOT digunakan didalam satu jalur instruksi, maka ladder diagram instruksi tersebut akan menjadi majemuk atau kompleks.
Didalam penggunaannya, masing-masing instruksi logika tersebut harus diperhatikan agar
000
100
LR00
Instruction
tidak terjadi kegagalan sistem ketika program dijalankan, contoh penggunaan dalam ladder diagram :
Sumber : Manual Book PLC Omron di PT. JTX
Gambar 2.20 Kombinasi Instruksi Logika AND, OR Dan AND NOT.
Tabel 2.7 Mneumonic Code Kombinasi Instruksi AND, OR Dan AND NOT.
Addres Instruction Operands
00000 LD 000
00001 AND 001
00002 OR 200
00003 AND 002
00004 AND NOT 003
00005 Instruction
Sumber : Manual Book PLC Omron di PT. JTX
2.3.9 OUT dan OUT NOT
Instruksi ini merupakan tahapan terakhir dari suatu jalur instruksi, instuksi inilah yang menentukan dan mengontrol kondisi output yang diinginkan dari sebuah program. Instruksi logika OUT memiliki simbol sebuah lingkaran dan memiliki kondisi kerja ON selama jalur instruksi bertegangan ( ON ) dan akan OFF bila jalur instruksi tidak bertegangan ( OFF ).
Instruksi logika OUT NOT memiliki simbol sebuah lingkaran yang dilengkapi dengan garis diagonal dan memiliki kondisi kerja OFF selama jalur instruksi bertegangan ( ON ), ia akan ON bila jalur instruksi tidak bertegangan ( OFF ).
Sumber : Manual Book PLC Omron di PT. JTX
Gambar 2.21 Instruksi Logika OUT.
000 001
Instruction
200
002 003
000
2000
Tabel 2.8 Mneumonic Code Instruksi Logika OUT.
Addres Instruction Operands
00000 LD 000
00001 OUT 2000
Sumber : Manual Book PLC Omron di PT. JTX
Gambar 2.22 Instruksi Logika OUT NOT.
Tabel 2.9 Mneumonic Code Instruksi Logika OUT NOT.
Addres Instruction Operands
00000 LD 001
00001 OUT NOT 2100
Sumber : Manual Book PLC Omron di PT. JTX
2.3.10 END
Instruksi END merupakan instuksi terakhir dari semua rangkaian ladder diagram.
Ketika CPU membaca program, ia akan menjalankan semua instruksi dari atas ( instruksi pertama ) sampai bawah ( instruksi terakhir ), yaitu instruksi END.
Instruksi END adalah instruksi yang berdiri sendiri dan tidak dapat digabungkan dengan instruksi logika apapun, jika instruksi ini tidak ditulis atau tidak ada pada suatu program secara keseluruhan maka program tidak dapat dijalankan sama sekali.
Sumber : Manual Book PLC Omron di PT. JTX
Gambar 2.23 Instruksi END.
001
2100
000 001
Instruction
END
Tabel 2.10 Mneumonic Code Instruksi END.
Addres Instruction Operands
00000 LD 000
00001 AND NOT 001
00002 Instruction
00003 END(01) ---
Sumber : Manual Book PLC Omron di PT. JTX
2.3.11 AND LOAD
Instruksi ini merupakan suatu instruksi logika blok ( Block Logic Instruction ), instruksi ini dipergunakan bila ingin menuliskan dua buah rangkaian blok atau lebih yang dihubungkan secara seri.
Gambar 2.24 Instruksi AND LOAD
Tabel 2.11 Mneumonic Code Instruksi AND LOAD.
Addres Instruction Operands
00000 LD 000
00001 OR 001
00002 LD 002
00003 OR NOT 003
00004 AND LD ---
00005 Instruction
Sumber : Manual Book PLC Omron di PT. JTX
2.3.12 OR LOAD
Sama dengan instruksi AND LOAD, instruksi ini termasuk ke dalam instruksi logika blok yang digunakan untuk mengabungkan dua rangkaian blok atau lebih secara parallel.
003 001
000 002
Instruction
Gambar 2.25 Instruksi OR LOAD.
Sumber : Manual Book PLC Omron di PT. JTX
Tabel 2.12 Mneumonic Code Instruksi OR LOAD.
Addres Instruction Operands
00000 LD 000
00001 AND NOT 001
00002 LD 002
00003 AND 003
00004 OR LD ---
00005 Instruction
Sumber : Manual Book PLC Omron di PT. JTX
2.3.13 Timer
Digunakan sebagai alat penunda waktu kerja, timer bekerja bila mendapatkan pulsa tegangan dengan penundaan waktu tertentu yang dapat di atur ( setting ) sesuai kebutuhannya. Timer akan non aktif bila sumber tegangan di putus ( off ).
Gambar 2.26 Instruksi Timer.
Sumber : Manual Book PLC Omron di PT. JTX 003
001 000
002
Instruction
2000
003 001
000
TIM 000
TIM 000
#150
TIM 001
#005
2100
Tabel 2.13 Mneumonic Code Instruksi Timer.
Addres Instruction Operands
00000 LD 000
00001 TIM 000
#150
00002 LD TIM 000
00003 OUT 2000
00004 LD 001
00005 TIM 001
#005
00006 AND NOT TIM 001
00007 OUT 2100
Sumber : Manual Book PLC Omron di PT. JTX
2.4 Pengaman
2.4.1 Molded Case Circuit Breaker ( MCCB )
Pengaman yang digunakan untuk mengamankan jalur daya atau rangkaian daya pada sebuah rangkaian. Pengaman ini bekerja dengan dua cara yaitu : secara thermal dan secara magnetic.
Operasi Thermal :
Operasi dari MCCB yang terjadi diakibatkan arus yang mengalir pada MCCB melebihi batas nominal yang diijinkan sehingga bimetal pada MCCB menjadi panas, karena perbedaan muai panjang antara logam yang satu dengan yang lain maka bimetal akan melengkung sehingga bimetal akan menekan tuas pemutus kontak.
Akibat tertekannya tuas pemutus kontak maka mekanisme pengunci kontak akan mengendur dan pegas akan menarik lengan kontak sehingga arus terputus, pemutus secara thermal atau thermis ini berlangsung secara lambat.
Operasi Magnetik :
Operasi pada MCCB jika terjadi hubung singkat atau short circuit. Bila terjadi hubung singkat maka arus yang melalui MCCB menjadi sangat besar sehingga pada kumparan akan timbul medan magnet yang sangat kuat. Medan magnet ini akan menarik angker ( anchor ) besi lunak yang terdapat pada MCCB sehingga aliran arus akan terputus. Pemutusan secara magnerik ini akan menimbulkan bunga api yang akan langsung diarahkan ke peredam.
Pada jenis-jenis tertentu MCCB ada yang menggunakan micrologic yang berfungsi sebagai pengatur arus nominal yang diijinkan pada rangkaian, waktu pemutusan beban lebih dan pada saat starting, serta sebagai pengatur arus pada saat starting.
Sumber : Katalog Spare Part PT. JTX
Gambar 2.27 Molded Case Circuit Breaker ( MCCB ).
2.4.2 Miniatur Circuit Breaker ( MCB )
Pengaman yang digunakan untuk mengamankan rangkaian kontrol, MCB digunakan untuk mengamankan arus dengan rating dibawah 100 A. Operasi kerja pada MC sama dengan operasi pada MCCB, menurut cara pemasangannya MCB digolongkan ke dalam dua bagian yaitu MCB satu Phasa, MCB dua Phasa dan MCB tiga phasa.
Sumber : Katalog Spare Part PT. JTX
Gambar 2.28 Miniatur Circuit Breaker ( MCB ).
2.4.3 Thermal Overload Relay ( TOR )
Thermal Overload Relay merupakan pengaman arus lebih yang ditunjukan untuk mengamankan motor, TOR ini bekerja berdasarkan operasi thermis saja karena ia tidak bisa
mendeteksi arus hubung singkat. Umumnya TOR dipasang pada jalur kabel motor setelah kontraktor.
Sumber : Katalog Spare Part PT. JTX
Gambar 2.29 Thermal Overload Relay ( TOR ).
2.4.4 Ampere Meter
Sebenarnya alat ini merupakan alat penunjuk beban mesin yang sedang beroperasi dan penunjukkannya berupa arus ( ampere ), ampere meter yang digunakan berbasis digital dan mempunyai kontak bantu seperti pada peralatan sensor ( pressure switch, load cell, dsb ).
Arus yang dideteksi oleh ampere meter ditentukan dari arus pengenal pada current trafo yang digunakan, pembatasan beban yang boleh ditanggung motor pada saat kompresor bekerja ( keadaan loading ) dapat disetel sesuai dengan arus nominal motor yang tertera pada name plate motor yang digunakan.
Sumber : Katalog Spare Part PT. JTX
Gambar 2.30 Ampere Meter.