BAB II
LANDASAN TEORI
2.1 Pengertian Sistem Pengendalian Banjir
Secara umum pengendalian adalah mengatur suatu benda atau hal dimana benda yang dikendalikan akan mengalami proses yang lain atau mungkin berkurang. Tema yang dibahas pada Tugas Akhir kali ini adalah mengendalikan air dalam jumlah banyak untuk dipindahkan ke tempat lain melalui media berupa alat yaitu pompa dan pipa. Air dalam jumlah banyak atau sering disebut banjir ini perlu di kendalikan karena merugikan kepentingan masyarakat.
Banjir sebenarnya sudah terjadi sejak dulu saat musim penghujan datang, namun pada jaman dulu karena penduduk yang masih sedikit dan saluran air atau drainase yang masih bagus maka tidak menimbulkan banyak masalah. Saat ini dengan jumlah penduduk yang semakin meningkat dan saluran air yang semakin sempit maka banjir hampir di pastikan menjadi langganan terutama warga ibukota, oleh karena itu dengan teknologi yang serba canggih telah dilakukan berbagai upaya untuk mengendalikan banjir.
(Rudyct: “Sistem Pengendalian Banjir di Jabodetabek” )
Alat atau Sistem pengendalian banjir yang dibuat kali ini bertujuan untuk memindahkan atau mengurangi air dari satu tempat ke tempat lain dengan menggunakan pompa. Pengontrol air menggunakan sensor ketinggian air yang akan bekerja memberikan sinyal jika air menyentuh level yang ditentukan, sensor di buat bertingkat untuk menjaga jika air semakin tinggi maka pulsa kedua akan diberikan ke PLC.
Input dari sensor ketinggian air yang pertama ke PLC akan menggerakan pompa 1 untuk membuang air, jika air habis maka dengan sendirinya PLC akan mematikan pompa. Namun jika air bertambah banyak yang berarti sensor memberi input kedua ke PLC maka pompa 2 akan bekerja membuang air.
Sistem ini bisa di jalankan secara manual yaitu dengan menekan tombol pompa 1 dan pompa 2 maupun secara otomatis seperti yang telah di jelaskan di atas.
Gambar 2.1 Lay Out Rangkaian
2.2 Sejarah PLC
Definisi PLC menurut national electrical manufactures association (NEMA) adalah suatu alat elektronika digital yang menggunakan memori yang dapat diprogram untuk menyimpan instruksi – instruksi dari suatu fungsi tertentu seperti logika, sekuensial, pewaktu, pencacah dan aritmatik untuk mengendalikan mesin, sehingga operasi PLC terdiri dari evaluasi input proses dan menghasilkan output untuk menggerakan peralatan. PLC pertama kali diperkenalkan pada tahun 1960-an dengan alasan utama perancangan PLC untuk menghilangkan beban ongkos perawatan dan penggantian sistem kontrol mesin berbasis relai. Bedford associates (Bedford MA) mengajukan usulan yang diberi nama MODICON ( kepanjangan dari modular digital kontroler) untuk perusahaan – perusahaan di Amerika sedangkan perusahaan lain mengajukan sistem berbasis komputer (PDP – 8). MODICON 084 merupakan PLC pertama di dunia yang digunakan pada produk komersil.
Pada pertengahan tahun 1970-an, teknologi PLC yang dominan adalah sekuenser mesin – kondisi dan CPU berbasis bit- slice. Prosesor AMD 2901 dan 2903 cukup populer digunakan dalam MODICON dan PLC A-B.
Kemampuan komunikasi pada PLC mulai muncul pada awal – awal tahun 1973. Sistem yang pertama adalah mobdus MODICON. Dengan demikian PLC bisa melakukan komunikasi dengan PLC lain dan bisa ditempatkan lebih jauh dari lokasi mesin sesungguhnya yang dikontrol.
Pada tahun 1980-an dilakukan usaha untuk menstandarisasi komunikasi dengan protokol otomasi pabrik milik general motor (general motor’s manufacturing automation protocol (MAP). Juga merupakan waktu untuk memperkecil ukuran PLC dan pembuatan perangkat lunak pemrograman.
Tahun 1990-an dilakukan reduksi protokol baru dan modernisasi.
Standar terakhir (IEC 1131-3) berusaha untuk menggabungkan bahasa pemrograman PLC dibawah satu standar internasional. Sekarang bisa dijumpai PLC – PLC yang dapat diprogram dalam diagram fungsi blok, daftar instruksi, C dan teks terstrukturnya pada saat bersamaan.
2.3 Perkembangan PLC
Berikut adalah perkembangan PLC dari masa ke masa:
1968 - Mulai dikembangkan konsep program kontroler.
1969 - Perangkat keras cpu kontroler dengan instruksi logic 1k pada memori dan 128 i/0 point.
1974 -Digunakan multiprosesor dalam PLC seperti timer, counter,operasi aritmatik 12 K pada memori dan 1024 I / O module.
1976 - Diperkenalkan remote input / output.
1977 - Diperkenalkan PLC berbasis mikroprosesor.
1980 - Dikembangkan kemampuan module I/O.
- Mempertinggi fasilitas komunikasi.
- Mempertinggi kemajuan perangkat lunak.
- Digunakannya personal mikroprosesor (PC) sebagai alat pemrograman.
1983 - Diperkenalkan PLC kecil dengan biaya rendah.
1985 - Sekarang mulai tersebarnya penggunaan PLC di industri sebagai sistem kontrol proses.
2.4 Konfigurasi PLC
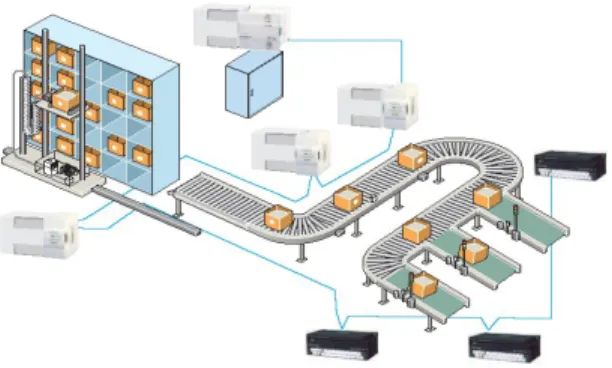
Programmable logic Controller (PLC) semakin banyak digunakan untuk memecahkan permasalahan kontrol otomatis. Awalnya PLC dirancang untuk menggantikan rangkaian logic / relay dan timer / counter relay yang merupakan bagian utama pada sistem yang komplek.
Gambar 2.2 Desain konveyor programmer PLC
Sebuah PLC dirancang untuk menggantikan ratusan rangkaian kontrol logic, kondisi standar masukan dan keluaran PLC dirancang untuk memungkinkan hubungan langsung atau interfacing dari PLC terhadap sistem.
PLC berbasis komputer pertama kali dikembangkan oleh Alan-Bradley, pada tahun 1977, dengan menggunakan microprocessor tipe 8080. Sejak itu bermunculan PLC yang berbasis pada microprosessor. Selain itu juga dikembangkan modul-modul tambahan, antara lain:
1. Analag I/O 2. PID Kontroller 3. Communication 4. Graphics Display 5. Additional I/O 6. Additional Memori
Modul-modul tambahan dibuat dalam bentuk modular sehingga memudahkan instalasi, perawatan dan perbaikan. Selain itu modularitas yang dibuat memungkinkan untuk pengembangan sistem ke skala yang lebih besar dengan mudah.
2.5 Sistem Komunikasi PLC
Sistem komunikasi pada PLC memungkinkan untuk dapat berkomunikasi dengan sistem lain, seperti komputer, printer, kontroller, perangkat ukur, perangkat program PLC dan lain-lain. Sistem komputer pada PLC kebanyakan serial, tetapi juga memungkinkan dilakukan secara pararel.
Pada komunikasi serial dapat menggunakan standar komunikasi RS-232 atu standar yang lainnya seperti: RS-422 atau RS-485.
Protocol komunikasi PLC berbeda-beda untuk setiap vendor. Pada protokol komunikasi selain menyangkut urutan tata cara berkomunikasi juga mencakup struktur data yang dikirimkan yang membuat suatu pesan yang berupa sebuah perintah, data dan lain sebagainya. Struktur data yang dikirim biasanya dalam satu paket data yang terdiri dari beberapa byte data. Di dalamnya antara lain kode peran, data kode untuk validasi data dan lain lain.
2.6. Fungsi / kegunaan PLC
Diatas telah dijelaskan definisi dari PLC dan fungsinya sebenarnya kalau lebih rinci banyak hal –hal yang bisa dilakukan oleh PLC antara lain:
Kontrol sekuensial
Bisa jadi pengganti sebagai relai kontrol logic konvensional
Pewaktu /pencacah
Pengganti pengontrol card (PCB)
Kontrol mesin auto/semi dari berbagi proses di industri
Kontrol canggih
Operasi aritmatik
Penanganan informasi
Konfigurasi analog (suhu, tekanan, aliran, dll)
PID (proporsinal intregrator,derivative)
Fuzzy logic
Kontrolmotor servo
Kontrol pengawasan
Proses monitor dan alarm
Monitor dan diagnose kesalahan
Antar muka dengan komputer (RS 232C/RS 422)
Antar muka dengan printer ASCII
Jaringan kerja otomatisai proses industri
Kelebihan PLC dari sistem kontrol konvensional antara lain :
Dibandingkan dengan sistem kontrol proses konvensional, jumlah kabel yang dibutuhkan bisa berkurang hingga 80 %.
PLC mengkonsumsi daya yang lebih rendah dibandingkan dengan sistem kontrol proses konvensional (berbasisi relai).
Fungsi dignostik pada sebuah kontroler PLC membolehkan pendeteksian kesalahan yang mudah dan cepat.
Pengubahan pada urutan operasional atau proses dapat dilakukan dengan mudah, hanya dengan melakukan pengubahan atau penggantian program, baik melalui terminal kosol maupun komputer PC.
Tidak membutuhkan spare part yang banyak.
Lebih murah dibandingkan dengan sistem konvensional, khususnya dalam kasus penggunaan instrument I / 0 yang cukup banyak dan fungsi operasionalnya yang kompleks.
Ketahanan PLC jauh lebih baik dibandingkan dengan relai auto mekanik (konsep, pemerograman dan aplikasi).
2.7 Arsitektur PLC
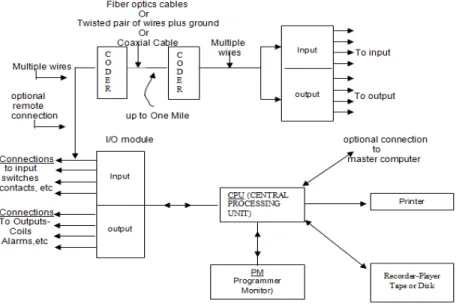
Bagian utama PLC yaitu central processing unit, memori dan unit input/output dengan fungsi khusus dan sistem komunikasi.
Gambar 2.3 Blok diagram PLC secara umum
Gambar 2.4 Aplikasi PLC
MCCB
MCB
Relay
Konektor kabel
Power Suply Noize Filter
PLC Mitsubishi FX1N-60MR
I / O
Inverter
Kontaktor
A. Central Processing Unit (CPU)
CPU mengatur dan mengawasi seluruh operasi PLC sehingga respon PLC terhadap sistem yang dikontrol sangat tergantung pada proses CPU. CPU merupakan otak dari sebuah kontroler PLC. CPU itu sendiri biasanya merupakan sebuah mikrokontroler (versi mini mikrokontroler lengkap), pada awalnya merupakan mikrokontroler 8 bit seperti 8051, namun saat ini bisa merupakan mikrokontroler 16 – atau 32 – bit. Biasanya untuk produk PLC buatan jepang. Mikrokontrolernya adalah hitachi dan fujitsu, sedangkan untuk produk eropa banyak menggunakan siemens dan motorola.
B. Memori
Memori PLC terdiri dari memori sistem operasi dan memori pemakai.
Memori sistem operasi adalah tempat menyimpan program yang mengendalikan operasi PLC. Memori pemakai merupakan lokasi penempatan program untuk pengendalian proses atau data PLC. Memori data PLC berfungsi sebagai buffer sementara kondisi input/output dan status fungsi- fungsi internal.
C. Random Access Memori (RAM)
RAM adalah memori internal CPU, dimana isinya dapat dimodifikasi dengan cepat dan berulang-ulang. Ukuran memori dapat dispesifikasikan dalam kilobytes, 1 kilobytes sama dengan 1024 bytes sedangkan 1 bytes sama dengan 8 bit. Sebuah memori yang besarnya 10 kilobytes sama dengan sebuah memori. RAM sering disebut juga read-write memori karena data secara konstant dapat ditulis ke dalam memori atau dapat dibaca dari memori.
D. READ ONLY MEMORI (ROM)
Informasi yang ada didalam ROM hanya dapat di baca saja. Informasi dimasukkan kedalam ROM oleh pabrik pembuat ke CPU. Salah satu jenis dari ROM adalah PROM (Programmable Read Only Memori). PROM adalah cara yang sederhana untuk menyimpan kumpulan program.
E. Erasable Programmable Read Only Memori (EPROM)
EPROM menyimpan data secara permanen. Tetapi ROM tidak membutuhkan battery backup. Isi memori EPROM bisa dihapus dengan penyinaran sinar ultraviolet, sebuah PROM writer diperlukan untuk memprogram kembali memori.
F. Electrically Erasable Programmable Read-Only Memori (EEPROM) EEPROM merupakan kombinasi fleksibilitas akses dari RAM dan non-volatility dari EEPROM. Isi memorinya bisa dihapus dan diprogram ulang secara elektris, tetapi tetap mempunyai batas dalam jumlah program ulang.
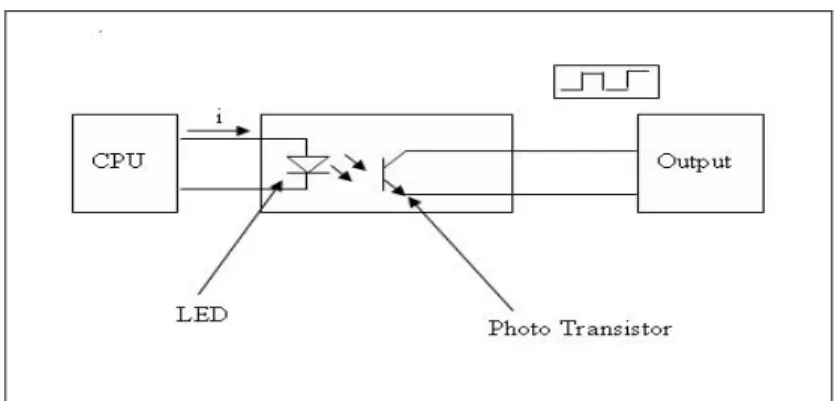
G. Unit input/ output
Unit input PLC terdiri dari unit yang mampu mempresentasikan sinyal sebagai saklar on/off (output level logika) atau sebagai penggerak yang level outputnya dapat diatur daalm jangkauan (range) dan langkah (step) tertentu (output level analog). Ada juga unit input/output yang mempunyai fungsi khusus seperti PID kontroler, kontrol motor high speed counter dll. Jumlah input/output yang diidentifikasai pada suatu PLC umunya bukan merupakan jumlah unit input/output yang terpasang, tetapi jumlah unit input/output maksimum yang dapat ditangani oleh CPU.
Gambar 2.5 input
Gambar 2.6 output
2.8 Fungsi pada PLC Mitsubishi Break contact
Gambar 2.7 Break kontak
Kontak akan membuka bila dimasukan input atau inisialisasi pada diagram sirkuit
Make contact
Gambar 2.8 Make kontak
Make kontak ini akan menutup bila dimasukan input pada diagram sirkuit.
Relay coil
Gambar 2.9 Relai coil
Relay coil, sama dengan input hanya saja sebagai output.
2.8.1 Fungsi dasar And
Gambar 2.10 Blok and
Pada blok ini keluaran hanya ada satu jika dari semua masukan adalah satu. Jika salah satu masukan nol maka keluaran akan nol.
Tabel 2.1 logic and
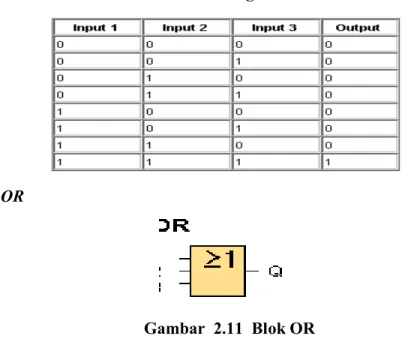
OR
Gambar 2.11 Blok OR
Pada blok or ini keluran hanya ada satu jika dari salah satu atau semua masukan bernilai satu maka keluaran akan menghasilkan satu. Pada ladder dipasang secara pararel. Jika ada salah satu tidak dihubungkan maka dianggap 1.
Tabel 2.2 logic OR
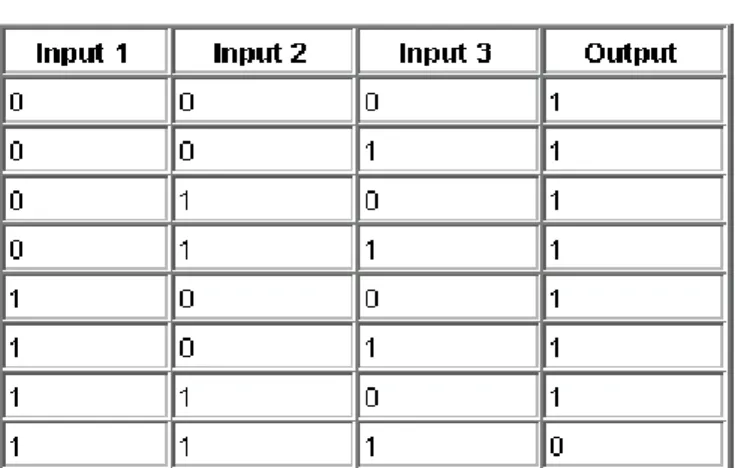
Nand
Gambar 2.12 Blok Nand
Keluaran dari nand ini berkebalikan dengan and dimana bila salah satu inputnya nol atau semunya nol maka keluaran bernilai 1 jika semua bernilai satu pada input maka outputnya akan bernilai nol. Jika tidak ada masukan maka dianggap satu.pada input
Tabel 2.3 logic nand
NOR
Gambar 2.13 Fungsi NOR
Status output nor hanya 1 jika semua bernilai nol pada input, selain dari itu outputnya bernilai nol. Jika salah satu input tidak diisi maka dianggap Satu
Tabel 2.4 logic Nor
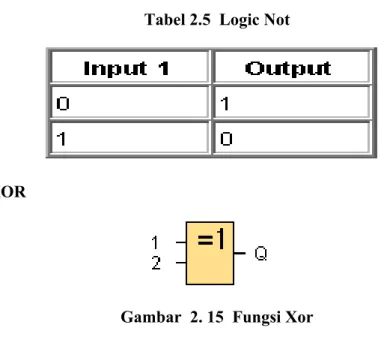
NOT
Gambar 2.14 Fungsi Not
Output akan bernilai satu jika nilai input nol jika input tidak dihubungkan maka ditetapkan input bernilai satu.
Tabel 2.5 Logic Not
XOR
Gambar 2. 15 Fungsi Xor
Out put dari Xor akan bernilai 1 jika nilai masukan tidak sama. Bila nilai masukan sama maka bernilai nol outputnya. Jika nilai sambungan tidak disambungkan maka dianggap nol.
Tabel 2.6 logic XOR
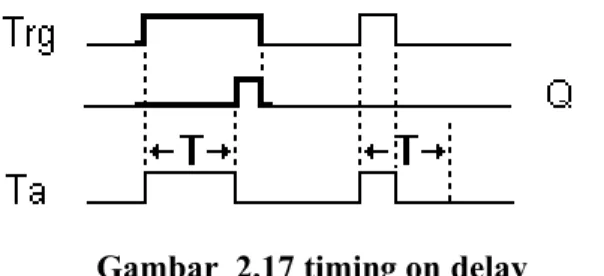
2.8.2 Fungsi spesial On delay
Gambar 2.16 Diagram on delay
Keluaran dari on delay dinyalakan setelah waktu penundaan. Timing diagram on delay
. Gambar 2.17 timing on delay
Pada on delay akan bernilai satu outputnya bila trg diberi satu dan delay habis, jadi out akan menyala jika sesuai delay jika input bernilai nol maka delay akan kembali lagi pada nilai awal.
Lacthing relay
Gambar 2.18 Diagram latching relay
Untuk mendapatkan nilai q satu maka nilai set harus mendapatkan nilai satu, jika nilai q ingin mendapatkan nilai nol maka reset harus mendapatkan nilai nol.. fungsi ini sama dengan fungsi nilai memory yang singkat.
Timing diagram lacthing relay
Gambar 2.19 timing off delay
Tabel 2.7 Lacthing relai
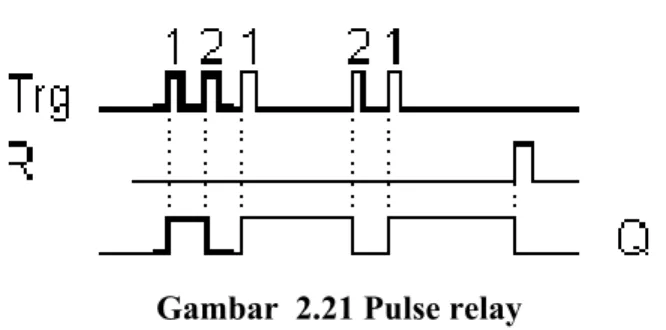
Pulse relay
Gambar 2.20 Diagram fungsi pulse relay
Pada pulse relay ini set dan reset pada satu input yang sama yang bekerja secara bergantian.
Timing diagram pulse relay
Gambar 2.21 Pulse relay
2.9 Operasi Pada PLC
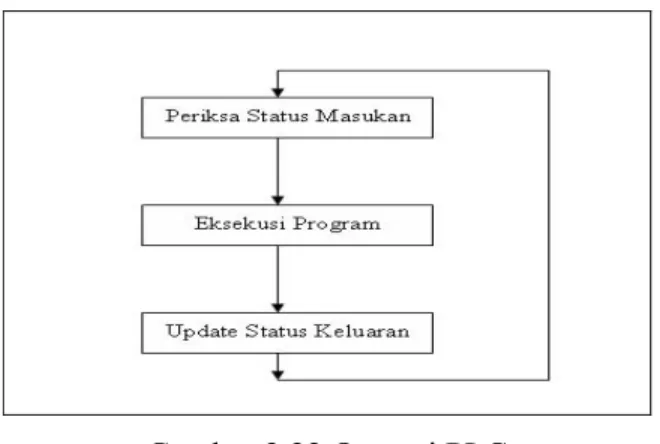
PLC bekerja dengan cara men-scan program. Dalam satu kali scanning program jika di uraikan maka terdapat tiga langkah penting, walaupun dalam kenyataannya lebih. Langkah-langkah tersebut dapat dilihat pada gambar di bawah ini:
Gambar 2.22 Operasi PLC
Adapun Penjelasan dari gambar diatas adalah sebagai berikut:
a. Pemeriksaan status masukan (input)
1. Pemeriksaan status masukan (input). Dalam hal ini PLC akan melihat status input apakah sedang dalam kondisi ON atau OFF. Misalnya Apakah suatu sensor yang terhubung dengan input pertama itu dalam kondisi ON?
Maka hasilnya akan disimpan dalam Memori PLC.
b. Eksekusi Program
2.. Eksekusi Program Setelah pemeriksaan status selesai maka PLC akan mengeksekusi program yang di buat per instruksi. Pada keadaan ini PLC sudah mengetahui dan akan menyimpan hasil eksekusi itu untuk digunakan pada tahap berikutnya.
c. Update status keluaran (Output)
3. Update status keluaran (Output) Update output ini tergantung input mana yang ON selama tahap 1 dan hasil hasil eksekusi dari tahap 2. Jika input pertama ON maka tahap 2, yaitu eksekusi program akan menghasilkan output pertama menjadi ON. Sehingga pada tahap ketiga akan mengupdate menjadi ON.
2.10 Waktu Respons (Response Time)
Waktu respons dapat digambarkan sebagai waktu yang dibutuhkan dari input yang diperoleh hingga dihasilkan output.
Gambar 2.23 Time respon
2.11 Komponen PLC Mitsubishi FX1N-24MR-ES/UL
Gambar 2.24 Komponen CPU
Spesifikasi Lihat lampiran.
2.12 Relay
Relay merupakan suatu sistem yang terdiri dari bagian saklar dan penggerak saklar. Jenis relay terdiri dari dari relay elektromagnetik, relay magnet dan relay panas(bimetal). Pada gambar 2.24 akan dijelaskan cara kerja relay.
Gambar 2.25 Relay elektromagnetik
Jika dalam kondisi aktif maka kontak akan terhubung atau NC (normaly close), jika tidak aktif maka saklar menjadi NO(normaly open).
Relay yang dipakai untuk pembuatan alat pengendali banjir ini menggunakan Relay Omron G2R-2SND 24 VDC, 5A.
2.13 Sensor
Sensor merupakan alat yang berfungsi untuk mengubah suatu nilai fisik ke fisik lainnya atau dapat disebut tranducer. Sinyal yang dipakai didefinisikan sebagai besaran elektris yang memberikan sinyal dalam tegangan listrik yang sangat kecil. Dilihat dari kondisi yang ada sensor dibagi ke 6 kelompok yaitu:
1. Mechanical : panjang, luas, tekanan, gaya, kecepatan dll 2. Thermal : Temperatur dan Heat flow
3. Elektrical : tegangan, arus, muatan,frekwensi dll 4. magnetic : intensitas medan, flux density dll 5. Radian : Panjang gelombang, polarisasi dll 6. Chemical : pH, konsentrasi dll
Sedang dari jenis sensor dibagi dua yaitu :
1. Active sensor : mengkonversi sifat atau isyarat fisik maupun kimia ke isyarat lain dengan bantuan sumber energi.
2. Passive sensor: mengkonversi sifat fisik maupun kimia tanpa bantuan sumber energi lain, contoh : Thermocouple.
Sensor yang dipergunakan untuk alat kali ini yaitu sensor level yang berfungsi untuk mendeteksi ketinggian dari level air yang nantinya akan menjadi input bagi PLC untuk menggrakkan motor.
2.14 Motor
Pada dasarnya sistem kerja motor AC dan DC sama, dimana memiliki 2 bagian dasar yaitu:
1. Stator : bagian ini menghasilkan medan magnet baik yang
dibangkitkan dari sebuah elektromagnet maupun magnet permanen.
2. Rotor : bagian ini adalah tempat arus mengalir.
Berdasarkan karakteristiknya motor dapat dibagi dalam 4 jenis : 1. Motor magnet Permanen : medan magnet di stator dihasilkan oleh magnet permanen
2. Motor Lilitan Seri : Motor ini dapat bekerja baik AC maupun DC sehingga banyak dipakai untuk peralatan rumah tangga.
3. Motor Lilitan paralel : kecepatan motor tidak dipengaruhi oleh beban namun oleh tegangan yang dikenakan ke motor.
4. Motor Lilitan Gabungan : merupakan gabungan dari seri dan paralel, medan magnet dihasilkan melalui dua koil yang terpisah.
Untuk Spesifikasi motor lihat di lampiran.
2.15 Power Suply
Power suply adalah alat untuk mengubah tegangan AC ke DC melalui rangkaian penyearah, biasanya tegangan yang dirubah dari 110-220 VAC ke 12-24 VDC. Tegangan ini dipergunakan untuk mencatu daya ke PLC.
Spesifikasi lihat di lampiran.