Bab ini akan menguraikan tentang deskripsi mesin conveyor line ATE-4, cara kerja dan landasan teori dari PLC Mitsubishi Q Series serta Intelligence Module Digital to Analog Q64DAN yang akan digunakan pada perancangan sistem kontrol mesin Conveyor line Tread Extruder ATE 4.
2.1 Deskripsi mesin Conveyor Line ATE – 4
Untuk mengetahui lebih lanjut mengenai mesin conveyor line ATE-4 yang merupakan bagian dari mesin tread extruder ATE-4, maka perlu dipahami proses extrusi kompon untuk menghasilkan tread secara keseluruhan. Pada dasarnya proses extruding yang dilakukan oleh mesin extruder ATE-4 akan menghasilkan
tread untuk bagian terluar pada struktur ban. Tread ini merupakan bagian terluar dari ban yang langsung bersentuhan dengan jalan selain itu juga merupakan komponen terluar dari sidewall (dinding ban). Mesin tread extruder ini secara kesluruhan terdiri dari empat bagian utama yaitu :
1. Main Extruder (Extruder PAB), dibagi menjadi dua bagian yaitu :
• Hot Feed (HF) Extruder untuk kompon panas (melalui proses homogenisasi / milling).
• Cool Feed (CF) Extruder untuk kompon dingin, tanpa melalui homogenisasi.Biasa hasilnya digunakan untuk bagian pinggir tread (sidewall)
2. Single Extruder, merupakan extruder tambahan yang berada terpisah dari extruder PAB. Untuk ukuran tread tertentu (biasanya berukuran besar), single extruder digunakan untuk membuat sidewall. Selain itu single juga bisa digunakan sebagai extruder pengganti jika extruder PAB mengalami
kerusakan. Antara single extruder dan conveyor line dihubungkan dengan sebuah transfer conveyor.
3. Conveyor Line, dibagi menjadi 8 conveyor yaitu :
• Conveyor pullout PAB, berfungsi sebagai penyesuai dimensi tread yang dihasilkan oleh extruder PAB dan berfungsi sebagai transfer conveyor antara extruder PAB dan conveyor line. Digunakan inverter Sumitomo HF-430 7.5 kW dan motor AC 7.5 kW sebagai penggeraknya
• Conveyor pullout single, conveyor ini menghubungkan antara extruder single dan conveyor transfer. Conveyor ini menggunakan inverter Sumitomo HF-430 5 kW dan motor AC 5 kW sebagai penggeraknya.
• Conveyor transfer, digunakan untuk transfer tread pada pembuatan tread ukuran besar dimana bagian crown (telapak ban yang bersentuhan dengan bidang jalan) dihasilkan oleh extruder PAB dan sidewall dihasilkan oleh extruder single dan keduanya digabungkan melalui conveyor transfer ini. Pada struktur mekaniknya conveyor ini terbagi menjadi dua conveyor terpisah yang dihubungkan melalui sebuah kopel mekanik. Jika hanya extruder PAB yang digunakan maka kopel mekanik conveyor transfer single dan PAB dilepaskan. Sebagai penggerak hanya digunakan satu buah motor AC 11 kW dan inverter Sumitomo HF-430 11kW.
• Conveyor marking dan weighing, pada conveyor ini tread diberi tanda berupa garis sebagai identitas tread (tipe, waktu pembuatan, jenis kompon yang digunakan) dan juga sebagai petunjuk untuk proses selanjutnya. Selain itu pada conveyor marking ini juga dilengkapi dilengkapi dengan peralatan timbang (weighing instruments) diantaranya load cell, AD4323 weighing scale dan balancing roller conveyor. Berat tread ditimbang terlebih dahulu
menggunakan inverter Sumitomo HF-430 7.5 kW dan motor AC dengan rating daya yang sama.
• Conveyor net, biasanya menggunakan chain conveyor, pada conveyor ini tread diberi perekat dan plastik sebelum masuk ke conveyor cooling. Conveyor ini juga dilengkapi dengan satu buah
blower untuk menghisap residu lem dan dua buah kipas angin
untuk mengeringkan lem. Conveyor ini menggunakan inverter Sumitomo HF-430 dengan rating daya 7.5 kW dan juga motor AC 7.5 kW sebagai penggeraknya.
• Conveyor upper cooling, pada conveyor ini tread didinginkan menggunakan air pendingin. Conveyor ini menggunakan motor AC 11 kW dan inverter Sumitomo HF-430 dengan rating yang sama.
• Conveyor lower cooling, merupakan perpanjangan dari conveyor upper cooling. Conveyor ini menggunakan inverter Sumitomo HF-430 11 kW dan motor AC 11 kW sebagai penggeraknya.
• Conveyor accumulator, pada conveyor ini terdapat sebuah accumulator sebagai fungsi transfer dari proses pendinginan pada cooling conveyor ke proses autoskiver. Digunakan motor AC 5 kW dan inverter Sumitomo HF-430 dengan rating yang sama sebagai penggeraknya
4. Autoskiver
Pada proses ini tread yang sudah didinginkan di cooling conveyor dipotong sesuai dengan spesifikasi panjang
5. Booking
Setelah tread dipotong sesuai dengan spesifikasi panjangnya maka tread dibawa oleh conveyor booking untuk kemudian diAngkat dan ditempatkan di pantruck (tempat untuk membawa tread) untuk dibawa ke proses produksi selanjutnya.
2.2 Konfigurasi Panel Listrik Mesin ATE 4
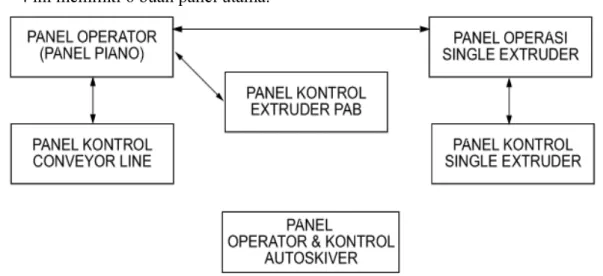
Pada sebuah mesin yang beroperasi dengan rangkaian listrik sebagai pengontrolnya, digunakan panel – panel sebagai pusat pengendalinya. Mesin ATE – 4 ini memiliki 6 buah panel utama.
Gambar 2.2 Konfigurasi Panel ATE-4
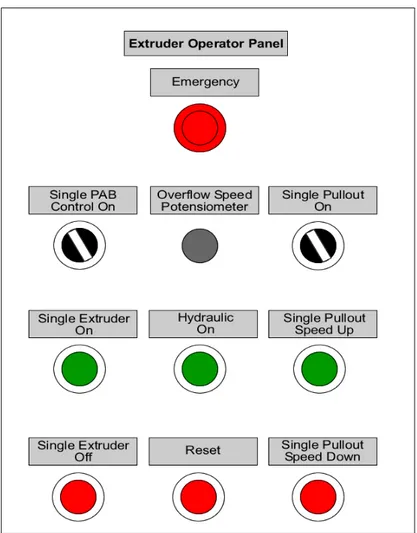
1. Panel Operator (Panel Piano)
Panel ini berisi tombol – tombol dan indikator yang digunakan oleh operator dalam pengoperasian mesin ATE – 4. Pada panel ini operator dapat melakukan setting terhadap speed extruder, speed conveyor line dan kontrol otomatis lainnya (misal : open – close PAB / Extruder Head). Selain itu juga terdapat indikator untuk speed extruder dan conveyor line, indikator arus (ampere) motor extruder dan indikator kondisi extruder head (temperature, pressure). Tombol – tombol kontrol operasi untuk conveyor line terdapat pada panel ini dimana letaknya tergabung dengan tombol operasi untuk control extruder.
2. Panel Kontrol Extruder PAB
Panel ini digunakan untuk mengontrol sistem extruder, diantaranya : DC drive (sebagai pengontrol motor utama), sistem pengaman extruder, sistem open – close extruder head. Panel ini tidak termasuk kedalam pokok pembahasan dalam tulisan ini.
3. Panel Kontrol Conveyor Line
Di panel ini terdapat rangkaian kontrol untuk masing – masing pada sistem conveyor line. Dipanel ini juga terdapat PLC sebagai pengontrol utamanya. Panel ini terdiri dari inverter – inverter sebagai pengontrol speed motor – motor conveyor line. Ada 8 inverter untuk delapan conveyor, masing masing inverter terhubung dengan sebuah variable resistor pada conveyor (untuk feedback) dan menggunakan PLC Mitsubishi Q series dengan Q64DAN Intelligence module sebagai pengontrolnya. Pada PLC ini juga terdapat program yang berfungsi untuk mengontrol sistem safety conveyor line.
Gambar 2.4 Panel Kontrol Conveyor Line
4. Panel Operasi dan Kontrol Autoskiver
Autoskiver menggunakan servo motor pada conveyor-nya, hal ini sesuai dengan karakteristik motor servo yang memiliki akurasi tinggi. Dengan menggunakan servo panjang potongan tread menjadi lebih presisi. Pada
panel autoskiver ini terdapat PLC Q series Mitsubishi yang berfungsi sebagai pengontrol utamanya, juga terdapat positioning module dan servo amplifier untuk pengontrol servo motor. Panel ini tidak termasuk dalam pembahasan pada tulisan ini.
5. Panel Operasi Single Extruder
Panel ini digunakan untuk mengoperasikan extruder single. Di panel operasi ini terdapat dua fungsi yang dapat digunakan oleh operator. Pertama, fungsi operasi untuk proses start up extruder single. Yang kedua adalah fungsi untuk pengontrol operasi dan kecepatan conveyor pull out single. Selain itu juga terdapat instrument indikator untuk kecepatan dan ampere motor extruder single.
6. Panel Kontrol Single Extruder
Panel ini berisi rangkaian DC Drive untuk kontrol motor DC single extruder. Tidak terdapat PLC pada panel ini. Rangkaian relay konvensional dipanel ini digunakan untuk kontroler proses start up extruder single.
2.3 Sejarah Programmable Logic Controller ( PLC )
Bedford Associates yang didirikan oleh Richard Morley memperkenalkan Programmable Logic Controller ( PLC ) pertama kali pada tahun 1968. PLC ini dikenal dengan nama Modular Digital Controller atau MODICON yang sekarang dikenal sebagai merk sebuah perusahaan PLC. Alat ini dikembangkan sebagai pengganti dari sistem relay pada panel control. Dengan penggunaan relay, sistem ini tidak fleksibel jika ada perubahan sistem control Alat pengendali terpogram telah dikembangkan pada industri sejak 1969 dengan sebutan Programmable Controllers (PCs). Nama tersebut didefinisikan oleh Capiel (1982), sedangkan nama Programmable Logic Controller (PLC) pertama kali dipopulerkan oleh perusahaan Allen Bradley.
Syarat umum sebuah PLC : 1. Mudah di program
2. Perawatan dan perbaikannya mudah
3. Handal, dapat digunakan pada lingkungan industri 4. Lebih kompak dan kecil daripada rangkaian dengan relay 5. Biaya lebih efisien dibandingkan dengan penggunaan relay
2.4 Gambaran PLC Secara Umum
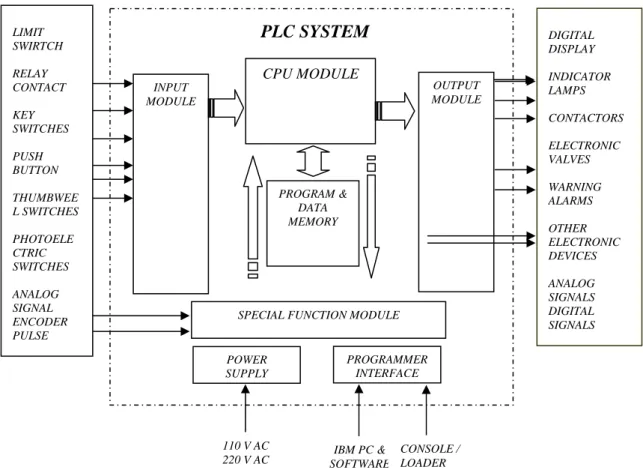
PLC tersusun dari beberapa blok komponen seperti yang diperlihatkan oleh gambar berikut :
Gambar 2.6 Blok Komponen PLC
2.4.1 Central Processing Unit ( CPU ) / CPU Module
Central processing Unit (CPU) merupakan otak dari sebuah PLC. Bagian – bagian CPU antara lain catu daya (power supply), processor, baterai cadangan ( back up battery ) dan memory.
Processor adalah bagian dari CPU PLC yang menerima, menganalisa, memproses dan mengirim informasi. Informasi yang dikirima atau diterima dalam bentuk pulsa digital. Processor mengambil instruksi / program yang akan dieksekusi kemudian diolah berdasarkan data yang diperlukan dari memory untuk kemudian dieksekusi. INPUT MODULE OUTPUT MODULE CPU MODULE PROGRAM & DATA MEMORY POWER SUPPLY PROGRAMMER INTERFACE LIMIT SWIRTCH RELAY CONTACT KEY SWITCHES PUSH BUTTON THUMBWEE L SWITCHES PHOTOELE CTRIC SWITCHES ANALOG SIGNAL ENCODER PULSE DIGITAL DISPLAY INDICATOR LAMPS CONTACTORS ELECTRONIC VALVES WARNING ALARMS OTHER ELECTRONIC DEVICES ANALOG SIGNALS DIGITAL SIGNALS PLC SYSTEM
SPECIAL FUNCTION MODULE
110 V AC
Memory pada CPU terutama pada CPU Module PLC Mitsubishi Q Series terdiri dari beberapa jenis, yaitu :
1. Program memory
Digunakan untuk menyimpan program yang akan digunakan dalam operasi processor. Program yang disimpan dalam Standard ROM di
boot ke program memory agar bisa digunkan oleh processor
2. Standard ROM
Program yang telah dibuat, disimpan pada standard ROM untuk kemudian di boot ke dalam program memory dan dieksekusi oleh processor. Standard ROM termasuk ke dalam non volatile memory (isi
dari memory tidak hilang jika tidak ada catu daya). Standard ROM ini juga berisi parameter – parameter untuk operasi CPU, termasuk juga parameter untuk intelligence module dan device comment (identitas
I/O atau memory) 3. Standard RAM
Standard RAM digunakan sebagai tempat register yang akan digunakan dalam operasi processor, biasanya register pada standard RAM digunakan sebagai register fast access (register yang berubah
isinya pada saat PLC beroperasi).
2.4.2 Power Supply Module
CPU, memory, Input/Output module dan peralatan pendukung dari PLC
membutuhkan tegangan 5 V DC untuk beroperasi. Power supply module
memberikan 5 V DC kepada peralatan tersebut. Power supply module mengubah tegangan sumber 110/220 V AC atau 24 V DC menjadi 5 V DC.
2.4.3 Base Unit
Base unit adalah rak – rak yang digunakan untuk menempatkan modul –
modul sesuai dengan slot – slot yang ada (slot CPU, Power supply, I/O). Jumlah slot yang ada pada base unit tergantung tipe base unit yang digunakan. Ada yang
memiliki dua, tiga, lima atau delapan slot untuk input/output tergantung dari tipe yang digunakan.
2.4.4Input Module
Pada modul ini sinyal masukan dalam bentuk keadaan ON atau OFF dari peralatan luar yang berfungsi sebagai input (contoh : relay, saklar, sensor, transducer) akan diteruskan ke CPU (Central Processing Unit). Pemakai dapat menggunakan tegangan 24 V AC,100 V AC, 200 V AC, 5 V DC, 12 V DC, 24 V DC sebagai sinyal masukan.
Sinyal masukan tersebut tidak dapat secara langsung diteruskan ke CPU, oleh karena itu input module mengubah tegangan tersebut ke tegangan 5 V DC
dan mengirimkan sinyal tersebut ke CPU. Input module terdiri dari terminal - terminal yang akan menghubungkan peralatan luar dengan PLC. Jumlah terminal tergantung dari jenis input module yang digunakan. Ada yang terdiri dari 16 buah terminal (16point input module), 32 buah terminal dan 64 buah terminal.
Pada input terjadi empat tahapan proses . Pertama, input modul melakukan
sensing pada ada tidaknya sinyal masukan pada tiap – tiap terminal input. Adanya
sinyal masukan menandakan switch, sensor atau sinyal lain pada proses yang
dikontrol dalam keadaan on atau off. Kedua, input modul mengkonversi sinyal
masukan ke dalam bentuk sinyal yang sesuai dengan sinyal kerja input modul. Ketiga, input modul melakukan pemisahan ( isolasi ) antara input dengan output.
Terakhir input modul menghasilkan sinyal output yang dijadikan sebagai input bagi CPU PLC. Secara garis besar blok diagram input modul ditunjukkan pada Gambar 2.7 Diagram Blok Struktur Internal Input Module.
Gambar 2.7 Diagram Blok Struktur Internal Input Module
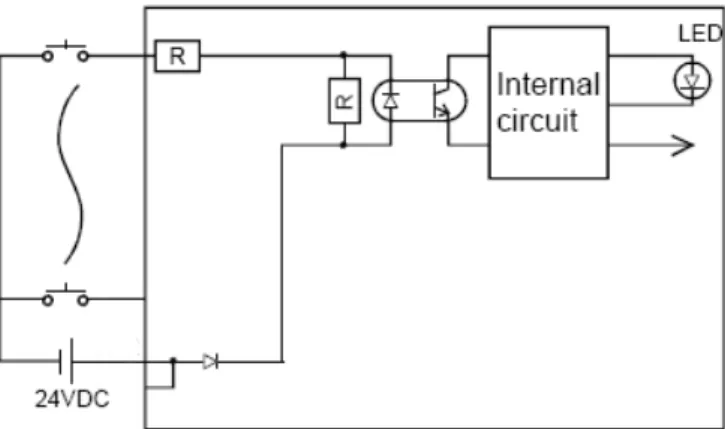
Untuk lebih memahami input module, pada gambar berikut dideskripsikan rangkaian input module secara lebih sederhana.
Gambar 2.8 Internal Circuit Input Module
2.4.5Output Modul
Modul ini meneruskan hasil dari program PLC yang sudah berupa sinyal ON atau OFF ke peralatan luar yang berfungsi sebagai output (contoh: 7 segmen, lampu indikator, kontaktor, relay dan alarm). Seperti pada input module, output module juga terdiri dari terminal - terminal yang akan menghubungkan PLC
dengan peralatan luar. Jumlah terminal tergantung dari tipe output module yang digunakan.
Secara garis besar blok diagram input modul ditunjukkan pada gambar dibawah ini :
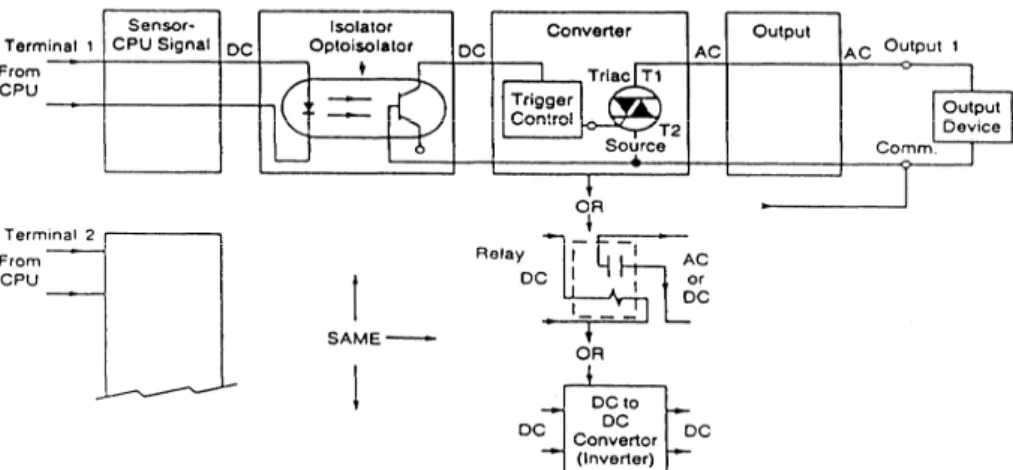
Gambar 2.9 Diagram Blok Struktur Internal Output Module
Pada output modul terjadi empat tahapan proses seperti pada input modul. Tahap pertama yaitu melakukan sensing pada ada tidaknya sinyal masukan dari
CPU. Sinyal ini selanjutnya diisolasi pada bagian optoisolator pada tahap
berikutnya. Hasil dari optoisolator dikonversi pada converter menjadi sinyal AC
( Alternating Current ) atau DC ( Direct Current ).
2.4.6 PLC Mitsubishi Intelligence Module
Pada aplikasi sistem kontrol sering terdapat fungsi – fungsi yang melibatkan instrumentasi khusus seperti analog to digital converter, digital to analog converter, pulse encoder (high speed pulse counter) dan lain sebagainya.
Sebagai otak dari sistem kontrol PLC harus memiliki perangkat yang dapat mendukung keseluruhan fungsi tersebut. Pada PLC Mitsubishi Q series terdapat beberapa jenis modul PLC seperti Power Supply Modul, CPU modul, I/O Module (seperti telah dijelaskan sebelumnya).
Selain modul – modul tersebut PLC Mitsubishi juga memiliki modul spesial yang dapat digunakan sebagai perangkat instrumentasi khusus, misalnya :
Analog to Digital Converter Module, Digital to Analog Converter Module, High speed counter module, positioning module, temperature module, serial communication module dan lain sebagainya. Special module atau pada PLC
dengan menggunakan software pemrograman seperti : GX Configurator D/A (untuk digital to analog converter), GX Configurator A/D (untuk analog to digital converter), GX Configurator CT (untuk high speed counter/encoder). Module ini secara fisik mirip seperti module I/O dan dipasang pada I/O slot base unit. Pada penulisan tugas akhir ini digunakan intelligence module Q64DAN (Digital to Analog Converter) sebagai actuator untuk menggerakan inverter.
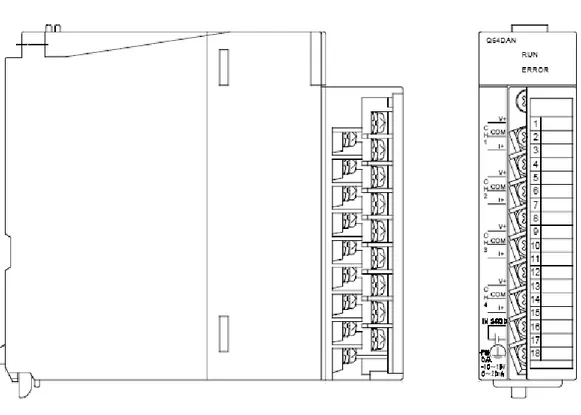
2.4.7Intelligence module Q64DAN
Gambar 2.10 Mitsubishi Intelligence Module Q64DAN
Intelligence module Q64DANN digunakan sebagai converter dari nilai digital ke besaran analog (Voltage atau Ampere). Berikut pada Tabel 2.1 Spesifikasi Q64DAN akan dijabarkan mengenai spesifikasi teknis dari Q64DAN.
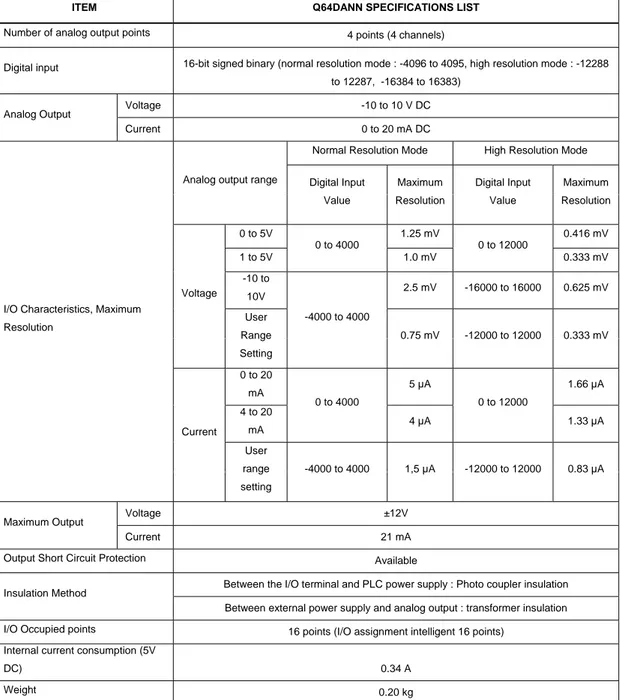
Tabel 2.1 Spesifikasi Q64DAN
ITEM Q64DANN SPECIFICATIONS LIST
Number of analog output points 4 points (4 channels)
Digital input 16-bit signed binary (normal resolution mode : -4096 to 4095, high resolution mode : -12288 to 12287, -16384 to 16383)
Voltage -10 to 10 V DC
Analog Output
Current 0 to 20 mA DC
Normal Resolution Mode High Resolution Mode
Analog output range Digital Input Value Maximum Resolution Digital Input Value Maximum Resolution 0 to 5V 1.25 mV 0.416 mV 0 to 4000 0 to 12000 1 to 5V 1.0 mV 0.333 mV -10 to 10V 2.5 mV -16000 to 16000 0.625 mV Voltage User Range Setting -4000 to 4000 0.75 mV -12000 to 12000 0.333 mV 0 to 20 mA 5 µA 1.66 µA 4 to 20 mA 0 to 4000 4 µA 0 to 12000 1.33 µA I/O Characteristics, Maximum
Resolution Current User range setting -4000 to 4000 1,5 µA -12000 to 12000 0.83 µA Voltage ±12V Maximum Output Current 21 mA
Output Short Circuit Protection Available
Between the I/O terminal and PLC power supply : Photo coupler insulation Insulation Method
Between external power supply and analog output : transformer insulation
I/O Occupied points 16 points (I/O assignment intelligent 16 points)
Internal current consumption (5V
DC) 0.34 A
Weight 0.20 kg
Pada dasarnya penggunaan QD64DAN sebagai D/A converter adalah sebagai berikut :
- Melalui program diperoleh digital value sesuai dengan nilai resolusi yang dipilih (4096, 12000, 16000)
- Nilai digital value tersebut ditransfer ke buffer memory yang ada di intelligence module Q64DANN
- Saat perintah conversion enable diberikan pada Q64DAN, maka proses
konversi nilai digital ke analog dilakukan oleh Q64DAN dan diperoleh keluaran analog sesuai dengan karakteristik keluaran yang diinginkan (0 to 10V, 1 to 5V, -10 to 10V, 0 - 20mA, 4 – 20mA, atau user range setting)
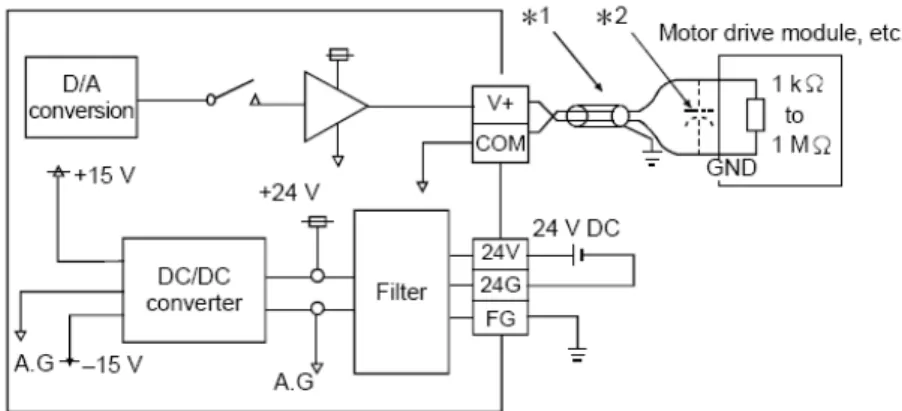
Untuk external wiring Q64DAN dapat dilihat pada gambar berikut ini :
Gambar 2.11 External Wiring Q64DAN
*1 Gunakan kabel 2 inti serabut dengan screen (twisted two core shielded wire)
*2 Jika ditemui adanya noise atau ripple pada external wiring maka dapat ditambahkan kapasitor 0.1 – 0.47µF 25V diantara terminal V+ dan COM
2.4.8 Programming Software
Saat ini kebanyakan PLC diprogram menggunakan PC atau laptop (notebook), tidak seperti sebelumnya yang menggunakan programming console (dibuat khusus untuk satu jenis PLC). Dibutuhkan sebuah software untuk dapat diinstal pada PC/Laptop yang berfungsi untuk menulis program dari PC / laptop ke PLC dan juga untuk membaca program yang ada pada CPU PLC, Apabila
program telah selesai dibuat maka untuk memasukkan program, digunakan link cable untuk menghubungkan PLC dengan komputer.
Selain itu software ini juga harus dapat melakukan fungsi debugger (untuk pengecekan program) dan fungsi error diagnostic. Pada PLC Mitsubishi Q series digunakan GX Developer sebagai programming software, ada pula fungsi dari GX developer :
• Membuat Ladder Program, Konfigurasi I/O PLC, Konfigurasi Network PLC dan lain sebagainya
• Membaca program yang ada di CPU PLC
• Menuliskan program yang sudah kita buat ke dalam CPU PLC
• Melakukan error diagnostic
• Melakukan “debugging” (write during running), dimana software ini dapat melakukan editing pada program pada saat PLC dalam posisi RUNNING
• Jika menggunakan special/intelligence module, dapat diinstal GX Configurator sebagai Add On software agar intelligence module dapat lebih mudah diprogram
Apabila program telah selesai dibuat maka untuk memasukkan program, digunakan link cable (bisa berupa RS-232 atau USB) untuk menghubungkan PLC dengan PC (programmer)
2.5 Device Pada PLC Mitsubishi
Untuk membuat program pada PLC, hal yang sangat mendasar untuk dipahami terlebih dahulu adalah jenis – jenis device yang ada pada PLC dan juga penggunaannya. Ada banyak device yang dapat digunakan pada PLC, yang umum digunakan misalnya : input, output, timer, counter, internal relay, register data dan buffer memory.
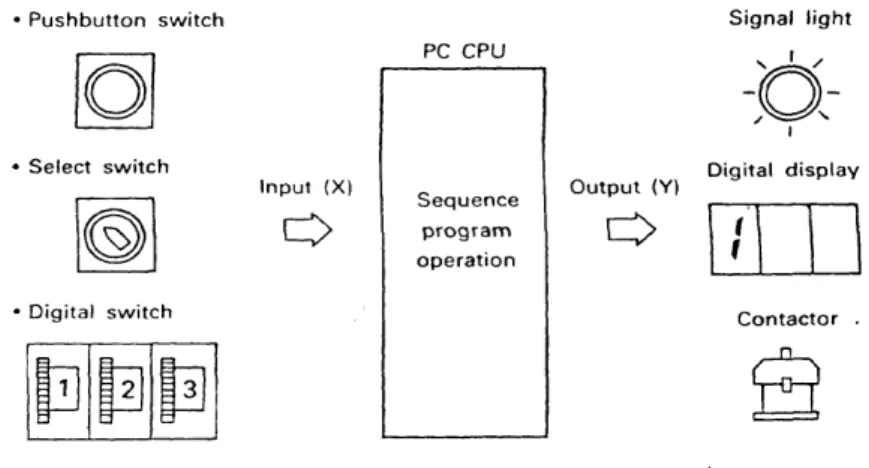
2.5.1 Input ( X ) dan Output ( Y )
Gambar berikut menunjukkan contoh peralatan input dan output pada sistem PLC.
Gambar 2.12 Input ( X ) dan Output ( Y )
Pada pemrograman input ditulis sebagai X dan output ditulis sebagai Y. Baik Input (X) ataupun Output (Y) memiliki penomeran yang unik (tidak boleh sama) menggunakan bilangan hexadecimal sebagai identitasnya, misalnya : X000, X0A0, Y080, Y09C.
2.5.2 Internal Relay
Ada 2 jenis internal relay yang dimiliki oleh Mitsubihi PLC Q series. Yang pertama berfungsi sebagai Auxiliary Relay (Relay Bantu) dan yang satunya lagi adalah special relay.
• Auxiliary Relay (M)
Relay bantu banyak digunakan sebagai pengganti konfigurasi external relay yang banyak digunakan pada panel konvensional. Dengan adanya relay bantu (relay virtual) yang digunakan dalam pemrograman, PLC dapat menggantikan rangkaian relay konvensional. Relay bantu yang dapat digunakan pada Mitsubishi PLC Q series adalah mulai dari M0 sampai dengan M8191. Jumlah relay yang akan digunakan dapat diseting pada
parameter setting, jumlah total relay bantu yang dapat diseting adalah
8192 buah relay.
• Special Relay (SM)
Special relay adalah internal relay yang memiliki fungsi khusus.
Kebanyakan dari mereka tidak dapat diaktifkan melalui program. Semua special relay aktif jika PLC aktif (PLC diubah dari kondisi STOP ke kondisi RUN). Special relay dalam kondisi OFF jika PLC dalam kondisi POWER OFF, LATCH CLEAR atau RESET. Berikut ini beberapa contoh special relay :
- SM400 = Relay yang akan menyala pada saat PLC ON (Power On).
- SM412 = Relay yang menyala dengan interval 1 detik sekali, atau biasa disebut clock 1 detik
- SM52 = Relay yang digunakan sebagai indikator battery PLC, jika
battery memerlukan penggantian maka relay ini akan menyala.
2.5.3 Timer ( T )
Timer ini terdiri dari koil dan kontak. Jika timer dinyalakan, maka koil ON. Kemudian timer akan menghitung sesuai dengan waktu yang telah diatur untuk menyalakan kontak. Mitsubishi PLC Q series memiliki sejumlah timer yang dapat digunakan pada pemrograman yang jumlahnya berbeda untuk tiap tipe PLC yang digunakan. Untuk jumlah timer yang dapat digunakan di PLC Mitsubishi Q Series Q01 Basic CPU adalah 512 buah mulai dari T 0 sampai dengan T 511. Jika diperlukan lebih dari 512 timer dala suatu program, maka dapat ditambah jumlahnya dengan melakukan pengaturan memory (memory yang belum terpakai dapat digunakan sebagai timer) pada parameter setting PLC
Gambar berikut menunjukkan contoh pemakaian timer dan diagram
waktunya :
Gambar 2.13 Cara Kerja Timer
2.5.4 Counter ( C )
Counter berfungsi sebagai penghitung. Jika counter diberi masukan dalam bentuk ON/OFF oleh sebuah kontak, maka counter akan menghitung naik mulai dari satu sampai nilai yang telah ditentukan. Jika nilai tersebut telah tercapai maka counter akan menggerakan kontak NO/NC. Nilai counter akan kembali ke nilai nol jika diberi masukan reset.
Jumlah counter yang dapat digunakan untuk PLC Mitsubishi PLC Q Series tipe Q01 Basic CPU adalah sebanyak 512 buah mulai dari C 0 sampai dengan C 511, jika dibutuhkan lebih dari 512 buah counter, maka jumlahnya dapat ditambah dengan mengatur konfigurasi memory pada parameter setting.
2.5.5 Data Register ( D )
DataRegister digunakan untuk menyimpan data numeric dalam PLC. Tiap
– tiap register memuat 16 bit data. Untuk menyimpan data 32 bit digunakan dua
register16 bit. Data numeric dalam bentuk hexadecimal, decimal ataupun biner
diisikan ke dalam register dan kemudian diolah oleh CPU. Data Hasil dari pengolahan CPU ditaruh kembali di sebuah register agar dapat digunakan. Ada beberapa format bilangan yang dapat digunakan dalam pengolahan data pada
Mitsubishi PLC Q series diantaranya HEX (hexadecimal), BIN (Biner), BCD (Binary coded decimal), FLT (Floating), DEC (decimal).
Gambar 2.14 Struktur 16 Bit Data Register
2.5.6 Buffer Memory Address (U \ G )
Buffer memory digunakan pada pemrograman dengan intelligence module, pada PLC Mitsubishi A series, buffer memory diakses dengan menggunakan perintah programming seperti “TO” (untuk menulis ke buffer memory) dan “FROM” (untuk membaca dari buffer memory). Sedangkan pada Q series, akses pada buffer memory dipermudah dengan menggunakan direct addressing pada program menggunakan “U” sebagai Head Address dan “G”
untuk Buffer Address, sehingga tidak perlu menggunakan perintah pemrograman
khusus buffer memory (TO dan FROM). Hal ini mempermudah programmer dalam menggunakan buffer memory, selain mengurangi jumlah program, juga mempermudah pembuatan program. Register pada buffer memory ini sama bentuknya dengan Data register yaitu berupa 16 bit data.
2.6 Instruksi – instruksi Pemrograman Mitsubishi PLC Q series
Ada banyak instruksi yang bisa diproses pada Mitsubishi PLC Q series, semakin canggih sebuah PLC semakin banyak instruksi – instruksi yang bisa digunakan dalam proses, sehingga memudahkan dalam programming.
Berikut akan dijelaskan beberapa instruksi pemrograman yang sering digunakan dalam pemrograman mesin Conveyor line Tread Extruder ATE 4.
2.6.1 SET – RST (SET dan RESET)
Bentuk dasar dari instruksi Set dan Reset dapat diilustrasikan dalam contoh berikut :
Gambar 2.15 Contoh Penggunaan SET-RST
Pada gambar diatas, sebelah kiri merupakan bentuk perintah SET / RST pada sebuah program, sedangkan sebelah kanannya merupakan time chart dari instruksi SET/RESET
Jika X5 ON maka instruksi SET akan menyalakan output Y10, dan output Y10 tetap akan menyala walaupun X5 sudah OFF (atau biasa disebut Holding). Y10 akan tetap menyala sampai sebuah instruksi RST Y10 dieksekusi. RST Y10 dinyalakan oleh X7, jika X7 ON maka Y10 akan reset dan kembali ke keadaan OFF.
2.6.2 MOV , DMOV (Perintah Transfer Register)
Perintah MOV digunakan sebagai fungsi transfer dalam program, instruksi ini digunakan pada program dengan bentuk sebagai berikut :
Gambar 2.16 Instruksi MOV
Simbol “S” berarti Source (sumber/asal) sedangkan “D” berarti Designated (ditujukan). Dengan demikian perintah diatas berarti pindahkan (transfer) S ke D
Gambar 2.17 Operasi instruksi MOV Contoh :
Pada perintah berikut :
Jika X10 ON, maka pindahkan (MOV) nilai 100 desimal ke data register D10. Hasil dari proses ini adalah D10 akan terisi nilai 100 (decimal).
Selain dapat memindahkan suatu nilai atau konstanta pada data register (direct transfer), dapat juga digunakan indirect transfer, misal :
Instruksi diatas berarti, pindahkan nilai yang ada pada data register D2 ke data register D70 jika X11 ON.
Perintah MOV merupakan perintah transfer 16 bit data, sedangkan untuk transfer 32 bit data digunakan perintah DMOV
Gambar 2.18 Instruksi DMOV
Pada pemrograman 32 bit, maka data yang ditulis pada program cukup alamat data register 16 lower bit , tetapi pada prosesnya instruksi ini mengikutsertakan 16 higher bit yang ditaruh pada data register selanjutnya, misal :
Isi register D5 dan D6 (register 32 bit) ditransfer ke register data D12 dan D13. Dimana D5 adalah lower 16 bit dan D6 adalah higher 16 bit dari source yang akan ditransfer ke D12 (lower 16 bit) dan D13 (higher 16 bit) dari designated data register.
2.6.3 FMOV Instruction
Digunakan pada program dalam bentuk :
Gambar 2.20 Instruksi FMOV
Dimana “S” (16 bit) adalah data yang akan ditransfer atau alamat data yang isinya akan ditransfer, “D” (16 bit)adalah alamat data yang menerima transfer (transfer destinantion), dan “n” adalah jumlah transfer. Jadi FMOV adalah instruksi untuk memindahkan data/isi data secara identik dan bersamaan. Dengan sumber data “S”, kemudian di transferkan secara identik dan bersamaan ke “n” data register dengan alamat awal “D”.
Contoh :
Program dengan FMOV diatas berarti, pindahkan bilangan decimal 0 (nol) ke data register mulai dari D10 sampai dengan D14 (5 data register) secara bersamaan. Hasil akhir yang diperoleh dari instruksi ini adalah Register D10 sampai dengan D14 bernilai 0 (nol)
2.6.4 Comparison Instructions (Instruksi Perbandingan)
Pada Mitsubishi PLC Q Series tersedia instruksi – instruksi yang digunakan untuk melakukan perbandingan data 16 bit ataupun 32 bit. Jika kondisi perbandingan tercapai, maka instruksi perbandingan tersebut dapat digambarkan sebagai sebuah kontak NO (Normally Open) pada posisi close. Berikut bentuk instruksi perbandingan yang digunakan pada program.
Hasil yang dapat diperoleh dari instruksi perbandingan adalah :
Tabel 2.2 Comparison Result
Contoh penggunaan instruksi perbandingan dalam program :
Pada contoh program diatas jika nilai D100 (data register no.100) tidak sama dengan 0 dan M3 kondisi ON, maka Y11 ON
Contoh lainnya :
Hasil dari perintah perbandingan ini adalah : Selama nilai D15 lebih kecil dari 1000 (decimal), maka M10 ON.
2.6.5 INC - DEC (Instruksi Increment - Decrement)
Gambar 2.23 Bentuk Instruksi INC / DEC
Jika instruksi ini dieksekusi maka nilai D (designated) akan ditambah dengan nilai 1. Misal :
Pada program diatas jika X3 ON maka nilai D40 akan bertambah (+ 1) secara terus menerus sampai X3 OFF atau dengan kata lain instruksi INC D40 dieksekusi secara terus menerus selama X3 masih dalam posisi ON. Kecepatan eksekusi atau bertambahnya nilai D40 tergantung dari scan time yang dibutuhkan oleh PLC untuk membaca keseluruhan program. Program seperti diatas menimbulkan banyak kesalahan, karena biasanya hanya dibutuhkan satu kali eksekusi INC D40 untuk setiap perubahan kondisi X3 dari OFF menjadi ON. Untuk menghindari hal diatas maka dapat digunakan perintah INCP sebagai berikut :
Jika digunakan perintah INCP (Increment with Pulse) maka instruksi INC hanya dieksekusi satu kali yaitu pada saat X3 berubah kondisi dari OFF ke ON. Walaupun X3 tetap menyala, perintah untuk menambahkan nilai D40 hanya diproses satu kali yaitu pada kondisi raising edge X3 dari OFF ke ON.
2.6.6 Operasi Aritmatika Penambahan dan Pengurangan
Gambar 2.24 Bentuk Operasi Penambahan dan Pengurangan
Operasi addition (pertambahan) dan subtraction (pengurangan) merupakan operasi aritmatika dasar yang bisa dilakukan oleh PLC Mitsubishi Q series. Struktur program dari instruksi penambahan dan pengurangan dapat dilihat pada gambar diatas. Contoh penggunaan instruksi penambahan dan pengurangan :
Penjelasannya sebagai berikut :
jika X3 ON, maka nilai yang ada di register D2 (16 Bit) ditambah dengan angka 5 dan hasilnya disimpan di register D10 (16 Bit).
Contoh operasi pengurangan :
Jika X3 ON maka isi dari register D20 dikurangi dengan nilai dari register D100 dan kemudian hasilnya disimpan di register D200.
2.6.7 Multiplication and Division (Perkalian dan Pembagian)
Operasi multiplication (perkalian) dan division (pembagian) data juga dikenal pada instruksi pemrograman di PLC Mitsubishi Q series.
Gambar 2.25 Bentuk Instruksi Perkalian dan Pembagian
Gambar diatas merupakan bentuk instruksi multiplication (perkalian) yang dilambangkan dengan tanda “ * ” dan juga bentuk dari instruksi division
(pembagian) yang dilambangkan dengan tanda “ / ”. S1 merupakan data yang
akan dikalikan atau dibagi, sedangkan S2 merupakan data pengali atau
pembaginya. Hasil dari operasi pembagian dan perkalian ini akan disimpan pada register dengan alamat D. Berikut contoh program yang menggunakan instruksi
perkalian dan pembagian data :
Jika X3 berubah dari kondisi OFF ke kondisi ON maka nilai yang ada di register D1 akan dikalikan dengan 25 (decimal) dan hasilnya akan ditaruh di register D5. Kemudian untuk instruksi pembagiannya terjadi jika kondisi X6 berubah dari ON ke kondisi OFF, apabila kondisi itu tercapai maka nilai D5 akan dibagi dengan 100 (decimal) dan hasilnya disimpan di register D10.
2.7 Inverter (Frequency Converter)
Frequency converter atau yang biasa dikenal dengan nama inverter adalah
alat untuk mengatur karakteristik motor terutama speed dengan pengaturan frekuensi pada sumber daya motor. Pengaturan frekuensi juga biasanya diikuti dengan penyesuaian pada tegangan outputnya, maka frequency converter ini juga sering disebut VVVF (Variable voltage, variable frequency). Pada inverter input power dalam bentuk sinusoidal dimodifikasi dan dimanipulasi sehingga dihasilkan daya dengan bentuk gelombang termodifikasi untuk menggerakan AC motor, hal inilah yang dikenal sebagai system VFD (Variable Frequency Drives).
Gambar 2.26 Sistem VFD
Komponen utama dari inverter adalah rangkaian rectifier (penyearah) dan
rangkaian untuk memanipulasi sumber DC menjadi sinyal AC termodifikasi. Rangkaian ini terdiri dari beberapa IGBT (atau dapat juga menggunakan transistor atau juga thyristor) dan juga kapasitor daya.
Gambar 2.27 Rangkaian Sederhana Inverter
Inverter yang digunakan pada proyek ini adalah inverter 3 Phase Sumitomo HF – 430 dengan kapasitas 5.5 kW , 7.5 kW dan 11 kW. Inverter ini digunakan untuk mengganti inverter Sumitomo AF-3100 yang sudah diskontinyu pada panel conveyor ATE-4.
Inverter pada cooling conveyor diatur keluarannya (speednya) melalui input terminal analog pada terminal VRF2, berupa input tegangan 0 – 10V DC.
Sedangkan untuk sinyal input forward dan reversenya diatur melalui input terminal FR dan RR, dengan BC sebagai common. Untuk input daya inverter
Sumitomo HF-430 digunakan tegangan 380V 3 fase pada terminal R-S-T.
Sedangkan untuk keluaran inverter langsung dihubungkan dengan motor induksi 3 fase pada terminal U-V-W.
Pada program sistem conveyor line ATE-4 akan dihasilkan output analog dari Q64DANN dengan nilai 0 – 10V DC. Output analog Q64DANN ini akan berfungsi sebagai input signal terminal VRF2. Karkateristik input analog pada terminal VRF2 terhadap frekuensi output inverter yang akan dihasilkan adalah sebagai berikut :
2.8 Variable Resistor (Potensiometer)
Variable atau potensiometer adalah sebuah resistor (hambatan atau tahanan; satuan : Ω) dimana besar / harga tahanannya dapat diatur sehingga dapat diperoleh keluaran tahanan yang variable.
Gambar 2.31 Potensiometer
Variable resistor diklasifikasikan berdasarkan 3 karakter utamanya yaitu : - berdasarkan resistansi / hambatan maksimum
- berdasarkan karakteristik resistansi, yaitu : linear atau logaritmik - berdasarkan ukuran fisik dari variable resistor itu sendiri
Untuk variable resistor dengan kapasitas daya 0.1 – 0.5W biasanya terbuat dari carbon sebagai material resistansinya, sedangkan untuk daya 0.25 – 2W biasa
digunakan cermet (ceramic metal) sebagai bahan resistansi. Jika dibutuhkan
variable resistor untuk aplikasi yang membutuhkan kualitas yang sangat baik, dengan noise yang sangat rendah dan kontrol mekanik yang sangat baik, biasa
digunakan variable resistor dengan conductive plastic (kapasitas daya 0.25 –
0.5W). Sedangkan untuk variable resistor dengan kapasitas daya yang besar ( 5 – 50W atau lebih) dapat digunakan variable resistor dengan material resistansi berupa lilitan kawat konduktor (misal : tembaga).
2.9 Peralatan Pengaman
Peralatan pengaman merupakan suatu peralatan yang dimanfaatkan untuk mengamankan suatu sistem rangkaian kontrol, contoh peralatan pengaman diantaranya :
- MCB ( Miniatur Circuit Breake )
- Fuse
2.9.1MCB ( Miniatur Circuit Breaker )
Adalah peralatan penghubung atau pemutus yang berfungsi sebagai pengaman rangkaian (sistem) dari beban lebih atau hubung singkat. Didalam MCB terdapat kumparan yang berfungsi sebagai pengaman bila terjadi hubung singkat dan bimetal bila terjadi beban lebih. Prinsip kerjanya :
• Operasi Thermal
Jika arus yang mengalir pada MCB melebihi batas nominal yang diijinkan maka bimetal pada MCB akan menjadi panas. Karena perbedaan muai panjang antara logam yang satu dengan logam yang lain maka bimetal akan melengkung. Melengkungnya bimetal akan menekan tuas pemutus kontak, sehingga mekanisme pengunci kontak akan mengendor dan spring ( pegas ) akan menarik lengan kontak sehingga arus terputus. Pemutusan secara thermis ini berlangsung secara lambat.
• Operasi Magnetik
Bila pada rangkaian listrik terjadi hubung singkat, maka arus yang mengalir pada MCB menjadi sangat besar sehingga pada kumparan timbul medan magnet yang sangat kuat. Medan magnet ini akan menarik angker dari besi lunak sehingga rangkaian terputus. Pada pemutusan secara magnetic ini timbul bunga api yang diarahkan ke peredam.
Gambar 2.32 MCB (Miniatur Circuit Breaker)
2.9.2Fuse
Fuse atau pengaman lebur adalah alat pengaman rangkaian listrik,
mempunyai kawat didalamnya dan melebur jika arus yang melewati melebihi nilai nominalnya. Pengaman lebur biasanya dipasang setelah MCB dengan maksud jika terjadi hubung singkat maka kawat isyarat dari pengaman lebur ini akan putus terlebih dahulu. Pengaman lebur yang sudah jelas putus tidak boleh diperbaiki untuk digunakan lagi kecuali yang memang dirancang untuk dapat diperbaiki.
2.10Solenoid Valve.
Solenoid merupakan suatu perlengkapan elektro-mekanik yang berfungsi mengontrol aliran angin atau cairan dengan cara mengontrol pergerakan aktuator besi pada solenoid valve tersebut.
Sebagian besar solenoid valve dikontrol secara elektrik,arus listrik dialirkan pada suatu koil yang terletak pada solenoid valve tersebut. Arus listrik menimbulkan medan magnet yang menimbulkan perpindahan actuator besi. Aktuator besi dihubungkan secara mekanik dengan suatu valve mekanik didalam solenoid tersebut . Sehingga pergerakkan aktuator akan menggerakkan valve ,membuka atau menutup yang menyebabkan angin / cairan mengalir atau di blok.
Suatu per / pegas digunakan untuk mengembalikan aktuator dan valve ke keadaan semula dengan cara memutuskan aliran listik pada koil solenoid.
Solenoid mempunyai bentuk dan ukuran yang bermacam-macam.Solenoid dapat berupa normally open,normally closed atau two way valve. Normally open solenoid valve merupakan suatu kondisi dimana cairan / angin mengalir melalui solenoid, hanya jika solenoid valve dialiri listrik. Normally closed valve merupakan kondisi yang berkebalikan dari normally open. Two way solenoid mempunyai tiga port, yaitu : common, normally open dan normally closed.
2.11Magnetic Relay
Relay banyak digunakan pada rangkaian konvensional, relay terdiri dari sebuah koil dan beberapa contact point. Pada dasarnya relay bekerja jika koil
diberi tegangan, sehingga akan terbentuk medan magnetik yang akan menggerakan contact point. Jumlah contact point pada relay bervariasi, tergantung dari tipe dan jenis yang digunakan. Terdapat dua jenis contact point pada relay, NO (Normally Open) contact dan NC (Normally Close) contact. Jika terminal – terminal dari contact point relay dihubungkan dengan actuator (misalnya antara catu daya dengan koil solenoide valve), maka jika koil pada relay menyala akibat diberi tegangan, medan magnetik akan timbul dan contact point akan terhubung (digunakan NO Contact) sehingga solenoide valve akan diberi masukan catu daya.
2.12Kontaktor
Kontaktor adalah peralatan yang berulang kali mengalirkan dan memutuskan aliran listrik dalam rangkaian tenaga, pemakaian kontaktor bisa pada rangkaian control tapi lebih banyak pada rangkaian tenaga dengan arus yang lebih besar sesuai dengan rating kemampuannya. Kontaktor bekerja berdasarkan prinsip elektromagnetik yang terdiri dari koil dan lempengan-lempengan logam yang dilaminasi untuk mengurangi rugi-rugi besi atau rugi inti.