PERANCANGAN DAN IMPLEMENTASI SISTEM KENDALI
POSISI MOTOR DC (DIRECT CURRENT) DENGAN
MENGGUNAKAN ARDUINO SEBAGAI PERANGKAT
PEMROSES BERBASIS PC (PERSONAL COMPUTER)
PROPOSAL TUGAS AKHIR
Diajukan Sebagai Salah Satu Syarat Untuk Memperoleh Gelar Sarjana Teknik Mesin
Disusun Oleh : Nama : M.Nofriandi No. Mahasiswa : 10525041
JURUSAN TEKNIK MESIN FAKULTAS TEKNOLOGI INDUSTRI
UNIVERSITAS ISLAM INDONESIA YOGYAKARTA
LEMBAR PENGESAHAN DOSEN PEMBIMBING
PERANCANGAN DAN IMPLEMENTASI SISTEM KENDALI
POSISI MOTOR DC (DIRECT CURRENT) DENGAN
MENGGUNAKAN ARDUINO SEBAGAI PERANGKAT
PEMROSES BERBASIS PC (PERSONAL COMPUTER)
PROPOSAL TUGAS AKHIR
Disusun Oleh : Nama : M.Nofriandi No. Mahasiswa : 10525041
DAFTAR ISI
1.4 Tujuan Penelitian dan Perancangan...2
Bab 2 Tinjauan Pustaka...4
2.1 Dasar Teori...4
2.1.1 Motor DC...4
2.1.2 Sistem Kendali Close Loop...7
DAFTAR TABEL
DAFTAR GAMBAR
Gambar 2-1 Motor DC dengan Pengontrolan Arus Jangkar...5
Gambar 2-2 Elemen-elemen dasar dari sistem kendali close loop...7
Gambar 2-3 Diagram blok pengendali PID...9
Gambar 2-4 Arduino Uno...12
Gambar 2-5 Blok Bagian-bagian Mikrokontroler...12
Gambar 2-6 Bagian-Bagian Papan Arduino...13
Gambar 2-7 Lampu Led Indikator Daya Pada Papan Arduino Menyala...15
Gambar 2-8 Program Control Panel dan memilih View device and printers...16
Gambar 2-9 Papan Arduino Muncul Pada Daftar Unspecified...17
Gambar 2-10 Window Arduino Uno Properties...17
Gambar 2-11 Window Arduino Uno Properties Change Setting...18
Gambar 2-12 window Update Driver...18
Gambar 2-13 Window Menentukan Lokasi Driver Pada Komputer...19
Gambar 2-14 Window Update Driver Software...20
Gambar 2-15 Window Peringatan Security...20
Gambar 2-16 Window Driver Arduino Sukses Diinstall...21
Gambar 2-17 Icon Setup File Installer Matlab...21
Gambar 2-18 Tampilan Saat mulai start...22
Gambar 3-1 Flow Chart skema penelitian...23
BAB 1
beragam mulai dari tipe magnet permanent, seri, kompon atau jenis magnet shunt. Motor DC memiliki kelebihan mudah dikontrol dan torsi yang sangat tinggi. Selain itu motor DC juga memiliki akurasi kontrol yang tinggi sehingga motor DC sering digunakan dalam dunia industri, elektronik dan komponen pendukung untuk beberapa peralatan atau instrumenstasi elektronik. Seperti pengendali posisi antena penerima satelit.Dewasa ini penggunaan sistem kendali sangat dibutuhkan dalam bidang
dunia industri, khususnya dalam industri proses. Sistem kendali yang semakin berkembang mampu meningkatkan kinerja sistem dan kualitas produksi. Sistem kendali dapat dipandang sebagai sistem dimana suatu masukan atau beberapa masukan tertentu digunakan untuk mengontrol keluarannya pada nilai tertentu. Tujuan sistem kendali adalah mengontrol sebuah variabel untuk mendapatkan nilai yang diinginkan. Keberadaan kontroler dalam sebuah sistem kendali mempunyai kontribusi yang besar terhadap prilaku sistem.
1.2
Rumusan Masalah
Berdasarkan latar belakang di atas, dapat dirumuskan masalah-masalah sebagai berikut:
1. Bagaimana merancang dan mengimplementasikan sistem kendali posisi Motor DC dengan menggunakan arduino sebagai perangkat pemroses berbasis PC.
2. Bagaimana sistem kendali posisi pada motor DC.
3. Bagaimana cara mengkomunikasikan antara PC dengan hardware yang dibuat.
4. Bagaimana membuat program untuk menghubungkan persamaan tersebut ke alat.
1.3
Batasan Masalah
Pembatasan masalah dalam penelitian ini agar ruang lingkup pembahasan menjadi jelas dan tidak meluas ke hal-hal yang tidak diinginkan. Pembatasan masalah dalam penelitian ini meliputi hal-hal sebagai berikut :
1. Tugas akhir ini hanya mengacu pada kendali posisi motor DC.
2. Hasil penelitian akan ditampilkan menggunakan Software MatLab.
3. Microcontroller yang digunanakan adalah jenis arduino uno.
1.4
Tujuan Penelitian dan Perancangan
1. Mengimplementasikan suatu sistem kendali posisi motor DC yang dirancang pada PC dengan menggunakan arduino.
2.5. Manfaat Penelitian
1. Membuat suatu sistem yang diharapkan berguna untuk keperluan industri yang menggunakan motor.
2. merupakan kegiatan ilmiah guna mempersiapkan mahasiswa menjadi kreatif, inovatif, serta produktif dan bernalar ilmiah.
3. Membentuk mahasiswa yang terampil, profesional, dan bertanggungjawab terhadap perkembangan Ilmu Pengetahuan dan Teknologi serta dapat mengaplikasikan teori yang telah didapat di bangku perkuliahan
BAB 2
TINJAUAN PUSTAKA
2.1
Dasar Teori
2.1.1 Motor DC
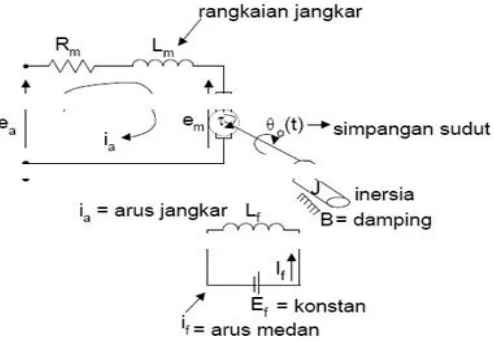
Motor DC mempunyai medan eksitasi yang terpisah sehingga pengontrolan motor DC dapat dibedakan, motor DC arus medan tetap dengan pengontrolan arus jangkar dan motor DC arus jangkar tetap dengan pengontrolan arus medan. Pengontrolan arus medan penguatan yang dibutuhkan dapat disederhanakan karena kebutuhan daya yang rendah. Namun menyediakan arus yang konstan jauh lebih sulit dalam pengontrolan medan dengan beban motor yang selalu berubah. Sedang pada pengontrolan arus jangkar gaya gerak listrik balik bekerja sebagai redaman dan pada pengontrolan arus medan tidak ada sehingga untuk redaman diperlukan, harus diberikan oleh motor dan beban. Selain itu kontrol arus medan mempunyai efisiensi yang rendah dan energi panas yang terjadi pada jangkar menimbulkan persoalan tersendiri. Konstanta waktu motor DC dengan penngontrolan medan biasanya lebih besar dari konstanta waktu motor DC pengaturan arus jangkar yang sebanding. Meskipun demikian dalam membandingkan konstanta waktu antara operasi dengan pengontrolan arus medan dan pengontrolan arus jangkar harus mempertimbangkan konstanta waktu penguat daya dalam studi operasi pengontrolan jangkar sehingga dalam penerapan sistem kontrol optimal indeks kinerja linear kuadratik ini digunakan motor DC pengontrolan arus jangkar.
Gambar 2-1 Motor DC dengan Pengontrolan Arus Jangkar (philips,1998)
Dimana :
ea = tegangan jangkar
Rm = tahanan jangkar
Lm = induktansi jangkar
em = tegangan EMF-balik
if = arus medan (konstan)
θ0 = sudut poros motor
K = konstanta motor
T = torsi yang dibangkitkan oleh poros J = momen inersia
B = damping
Torsi motor T, dihubungkan dengan arus jangka ia oleh faktor
pengali Ki Sedangkan gaya gerak listrik balik em , dihubungkan dengan kecepatan sudut melalui persamaan berikut :
em(t)=K∅dθdt0 (2.1)
θ(s) Ea(s)
= Kt
(
Js+B)
+(
Ls+R)
+Kt2 (2.10)
2.2.2 Sistem Kendali Close Loop
Sistem kendali close loop merupakan sistem kendali yang sinyal keluarannya mempunyai pengaruh langsung terhadap aksi pengendaliannya. Sistem kendali close loop disebut juga sistem pengendali dengan umpan balik.
Elemen sistem pembanding dalam sistem close loop direpresentasikan oleh sebuah simbol lingkaran dengan tanda (+) pada nilai yang diingin kan dari masukan dan tanda (-) pada sinyal umpan balik nya. Lingkaran merepresentasikan unit penjumlahan , dan penjumlahan yang diperoleh adalah:
+ nilai yang diinginkan – nilai umpan balik = Error
Berikut ini adalah uraian fungsi-fungsi dari masing-masing elemen tersebut diatas:
1. Elemen pembanding
Elemen pembanding berfungsi untuk membandingkan nilai yang dikehendaki dari variabel yang sedang dikontrol dengan nilai terukur yang diperoleh dan menghasilkan sebuah sinyal error.
Error = sinyal dengan nilai yang diinginkan – sinyal dengan nilai sebenarnya yang terukur.
2. Elemen kontrol
Elemen kontrol menentukan aksi atau tindakan apa yang akan diambil bila diterima sebuah sinyal error. Kontrol yang dilakukan dapat berupa diberikannya sebuah sinyal yang akan menyalakan atau memadamkan sebiah saklar jika terdapat sinyal error.
3. Elemen koreksi
Elemen koreksi disebut juga sebagai elemen kontrol akhir ,elemen ini termasuk elemen yang menghasilkan suatu perubahan di dalam proses ,yang bertujuan untuk mengkoreksi atau mengubah kondisi yang
2.1.2 Kendali Umpan-Balik PID
Jenis kendali stabilisasi umpan-balik PID, merupakan gabungan antara pengendali proporsional, integral, dan turunan (derivative). Dalam waktu kontinyu, sinyal keluaran pengendali PID dapat dirumuskan sebagai berikut :
u(t) = Sinyal keluaran pengendali PID Kp = konstanta proporsional
TI = waktu integral
Td = waktu turunan
KI = konstanta integral
Kd = konstanta turunan
e(t) = Sinyal kesalahan
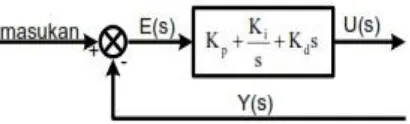
Jadi, fungsi alih pengendali PID (dalam domain s) dapat dinyatakan sebagai berikut :
GC(s)=Kp+Ki
s +Kd s (2.13)
Diagram blok pengendali PID ditunjukkan pada gambar 2-3 dibawah ini :
Gambar 2-3 Diagram blok pengendali PID
u(k)=Kp. e(k)+Ki.T
∑
Matlab simulink dapat digunakan untuk pengembangan algoritma pada
arduino. Arduino adalah platform prototipe elektronik open-source, yang berdasarkan perangkat keras dan lunak yang fleksibel murah dan mudah digunakan. Arduino terdiri dari mikrokontroler Atmega yang menyediakan konektivitas digital dan analog serta komunikasi serial.
Platform Arduino dapat membantu memahami alur kerja untuk merancang sebuah embedded system tanpa menggunakan pemrograman manual. Matlab Simulink digunakan untuk membuat algoritma pada sistem kontrol dan aplikasi robotika. Selain itu program simulink dapat digunakan untuk mensimulasi sistem artinya mengamati dan menganalisa perilaku dari tiruan sistem. Tiruan sistem diharapkan mempunyai perilaku yang sangat mirip dengan sistem fisik. Simulink sebagai aplikasi untuk dunia industri seperti desain model.
Simulink yang dirancang untuk platform Arduino meliputi : instalasi otomatisdan konfigurasi
Library dari blok Simulink yang terhubung ke Arduino I / O seperti analog input dan output , serial untuk menerima dan mentransmisikan program, dan servo digunakan untuk membaca dan menulis suatu program
2.1.4 ARDUINO
Arduino adalah sebuah papan elektronik prototyping berplatform terbuka berbasiskan Microkontroler ATmega yang bertujuan untuk memudahkan para pemula, desainer, artis ataupun siapa saja yang ingin bermain dengan elektronika dan pemrograman untuk mendesain berbagai objek interaktif yang dapat berkomunikasi dengan kita maupun lingkungan.
Keuntungan menggunakan arduino antara lain:
1. Software Arduino dapat dijalankan pada sistem operasi Windows ,Macintosh OSX, dan Linux.
2. Bahasa pemograman yang digunakan adalah processing. Processing adalah bahasa pemograman yang digunakan untuk menulis program di dalam arduino. Processing sangat mirip dengan bahasa C++ dan Java, sehingga pengguna yang sudah terbiasa dengan kedua bahasa tersebut tidak mengalami kesulitan dengan processing.
3. Sistem yang terbuka (open source) baik dari sisi hardware maupun software.
Secara umum Arduino terdiri dari dua bagian yaitu: 1. Hardware
Dalam hardware ini termasuk papan input/output (I/O) 2. Software
Software Arduino meliputi IDE (Integrated Development Environment) berfungsi menulis program, Driver untuk koneksi dengan komputer, contoh program dan library untuk pengembangan.
2.1.5 ARDUINO UNO
Arduino Uno adalah board mikrokontroler berbasis ATmega328. Memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output Pulse Width Modulations (PWM) dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, dan tombol reset. Untuk menggunakan mikrokontroler ini, cukup menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau bisa juga dengan menggunakan Adaptor.
Gambar 2-4 Arduino Uno
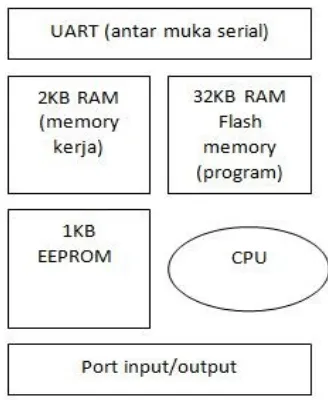
2.1.5.1 Diagram Blok Sederhana Dari Microcontroller ATmega328 (Arduino Uno)
Bagian-bagian dari mikrokontroler Atmega328 dapat dilihat pada gambar 2-12 dibawah ini:
Gambar 2-5 Blok Bagian-bagian Mikrokontroler
Keterangan dari gambar blok-blok diatas adalah
1. Universal Asynchronous Receiver/Transmitter (UART) adalah antar muka yang digunakan untuk komunikasi serial seperti pada RS-232, RS-422 dan RS-485
2. 2KB RAM pada memory kerja bersifat volatile (hilang saat daya dimatikan), digunakan oleh variable-variabel di dalam program.
3. 32KB RAM flash memory bersifat non-volatile, digunakan untuk menyimpan program yang dimuat dari komputer. Selain program, flash memory juga menyimpan bootloader.
4. Bootloader adalah program inisiasi yang ukurannya kecil, dijalankan oleh CPU saat daya dihidupkan. Setelah bootloader selesai dijalankan, berikutnya program di dalam RAM akan dieksekusi.
5. 1KB EEPROM bersifat non-volatile, digunakan untuk menyimpan data yang tidak boleh hilang saat daya dimatikan. Tidak digunakan pada papan Arduino.
7. Port input/output, pin-pin untuk menerima data (input) digital atau analog, dan mengeluarkan data (output) digital atau analog.
2.1.5.2 Bagian-Bagian Papan Arduino Uno
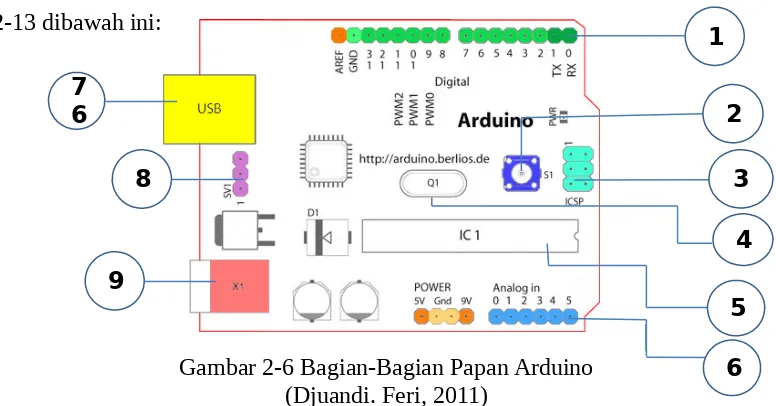
Bagian-bagian nya dapat dijelaskan seperti yang ditunjukkan pada gambar 2-13 dibawah ini:
Gambar 2-6 Bagian-Bagian Papan Arduino (Djuandi. Feri, 2011)
Keterangan gambar dari bagian-bagian papan Arduino yaitu: 1. 14 pin input/output digital(0-13)
Berfungsi sebagai input atau output, dapat diatur oleh program. Khusus untuk 6 buah pin 3, 5, 6, 9, 10 dan 11, dapat juga berfungsi sebagai pin analog output dimana tegangan output-nya dapat diatur. Nilai sebuah pin output analog dapat diprogram antara 0 – 255, dimana hal itu mewakili nilai tegangan 0 – 5V.
2. Tombol Reset S1
kepada microcontroller agar melakukan sebuah operasi untuk setiap detak-nya. Kristal ini dipilih yang berdetak 16 juta kali per detik (16MHz).
5. IC 1 – Mikrokontroler Atmega
Mikrokontroler Atmega merupakan Komponen utama dari papan Arduino, di dalamnya terdapat CPU, ROM dan RAM.
6. 6 pin input analog (0-5)
Pin ini sangat berguna untuk membaca tegangan yang dihasilkan oleh sensor analog, seperti sensor suhu. Program dapat membaca nilai sebuah pin input antara 0 – 1023, dimana hal itu mewakili nilai tegangan 0 – 5V. 7. USB
USB berfungsi sebagai pemuat program dari komputer kedalam papan arduino, sebagai komunikasi serial antara papan dengan komputer dan sebagai pemberi masukan daya listrik kepada papan.
8. Sambungan SV 1
Sambungan atau jumper untuk memilih sumber daya papan, apakah dari sumber eksternal atau menggunakan USB. Sambungan ini tidak diperlukan lagi pada papan Arduino versi terakhir karena pemilihan sumber daya eksternal atau USB dilakukan secara otomatis.
9. X1 Sumber Daya Eksternal
Pada papan arduino jika hendak disuplai dengan sumber daya eksternal dapat diberikan tegangan DC antara 9-12V .
Gambar 2-7 Lampu Led Indikator Daya Pada Papan Arduino Menyala (Djuandi. Feri, 2011)
2.1.6 SOFTWARE ARDUINO
Software Arduino yang akan digunakan adalah driver dan IDE. IDE Arduino adalah software yang ditulis dengan menggunakan Java. IDE Arduino terdiri dari:
1. Editor program, sebuah window yang memungkinkan pengguna menulis dan mengedit program dalam bahasa Processing.
2. Compiler, sebuah modul yang mengubah kode program (bahasa Processing) menjadi kode biner. Yang bisa dipahami oleh microcontroller.
3. Uploader, sebuah modul yang memuat kode biner dari komputer ke dalam memory di dalam papan Arduino.
2.1.7 Cara Menginstall Driver USB Arduino Pada Windows 7
Adapun langkah-langkah menginstall driver USB Arduino yaitu:Gambar 2-8 Program Control Panel dan memilih View device and printers
2. Papan Arduino akan muncul pada daftar perangkat namun karena belum dikonfigurasi dengan benar maka akan muncul di daftar unspecified dan terdapat lambang peringatan segitiga kuning dengan tanda seru yang artinya perangkat ini belum bekerja dengan benar.
Kemudian Klik kanan pada icon Arduino kemudian pilih menu
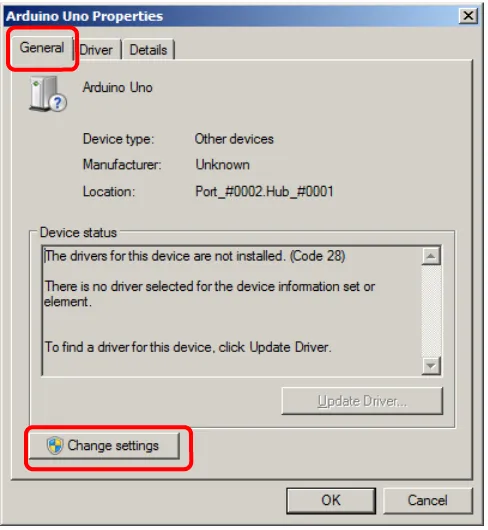
Properties. Seperti yang ditunjukan pada gambar 2-16.
3. Kemudian akan muncul gambar seperti yang ditunjukan pada gambar 2-17, selanjutnya pada tab Hardwareklik tombol Properties.
Gambar 2-10 Window Arduino Uno Properties
4. Setelah tombol properties diklik maka akan muncul window baru lagi yang dapat dilihat pada gambar 2-18 dibawah ini. Kemudian pada tab
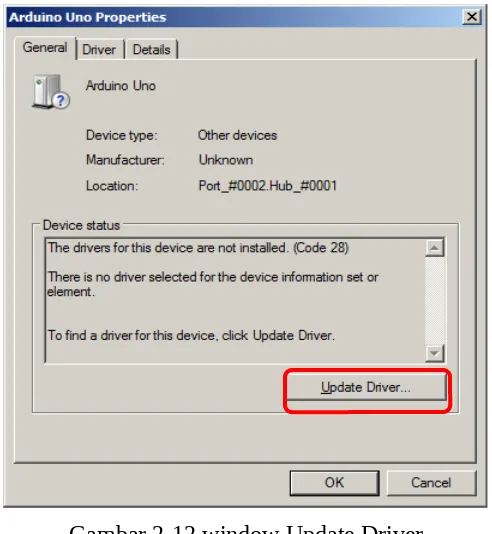
5. Pada tab yang sama seperti yang ditunjukan pada gambar 2-19, klik tombol UpdateDriver .
Gambar 2-12 window Update Driver
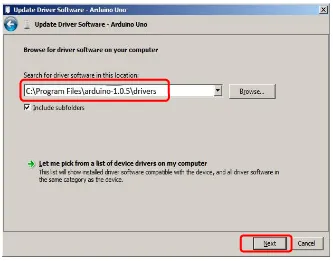
6. Langkah selanjutnya adalah klik Browse my computer for driver
software. Ini untuk menentukan sendiri lokasi driver yang disimpan
didalam komputer ,dapat dilihat pada gambar 2-20.
7. Tentukan lokasi dimana software Arduino ditempatkan pada komputer, pada gambar 2-21 ini adalah C:\Program Files\arduino-1.0.5\drivers. sesuaikan lokasinya sesuai dengan hasil ekstrak software Arduino pada komputer. Di dalam lokasi tersebut terdapat sebuah direktori bernama drivers, arahkan untuk mencari driver di dalam direktori tersebut.
Gambar 2-14 Window Update Driver Software
8. Jika driver Arduino selesai diinstal pada komputer maka pada akhir proses akan tampil sebuah pesan berhasil seperti berikut ini.
Gambar 2-16 Window Driver Arduino Sukses Diinstall
2.1.8 Cara Menginstall Matlab Pada Windows 7
Dibutuhkan beberapa langkah untuk menginstall Matlab pada windows 7 yaitu :
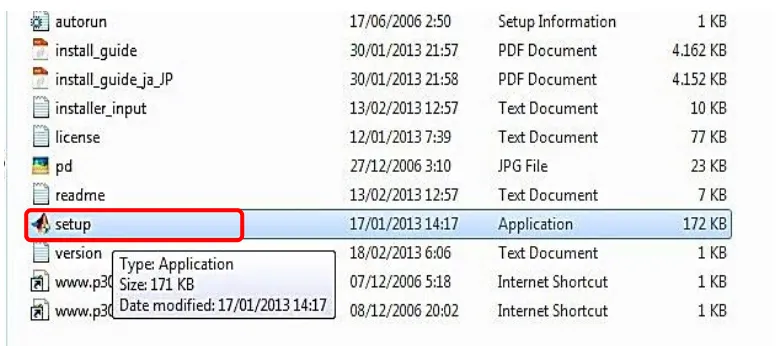
1. Memulai Installer
Untuk menginstal Matlab, maka diperlukan installer/ program Matlab, Masukkan DVD ke dalam DVD drive yang terhubung ke sistem atau klik dua kali file installer yang Anda download dari situs MathWorks seperti yang ditunjukin pada gambar 2-24.
2. Pilih Apakah Menginstall dengan Menggunakan Internet atau Tanpa Internet.
Kemudian ketika muncul tampilan seperti yang ditunjukkan pada gambar 2-25 lalu klik install without using the internet seterusnya klik Next.
Gambar 2-18 Tampilan Saat mulai start
3. Persetujuan Terhadap Perjanjian Lisensi
Pada layar akan tampak tampilan seperti Gambar yang mempertanyakan persetujuan terhadap perjanjian lisensi. Tekan Yes yang menandakan setuju, dan
BAB 3
METODOLOGI PENELITIAN
3.1
Flow Chart
Pada penelitian tugas akhir ini memiliki flow chart, terdiri dari beberapa tahapan-tahapan proses yang akan dilakukan, yaitu :
3.2
Perangkat yang digunakan
Perangkat yang digunakan dalam penelitian ini terdiri dari dua yaitu: 1. Perangkat keras
Perangkat keras terdiri dari : Motor Dc
Arduino Uno Kabel serial.
PC (personal computer). 2. Perangkat Lunak
Operating system pada PC seperti windows MatLab
Arduino
3. Setting Peralatan
Adapun setting peralatan yang digunakan dapat dilihat pada gambar 3-2 dibawah ini :
3.3
Rencana Jadwal Penelitian
Rencana jadwal kegiatan penelitian dapat dilihat pada tabel 1 dibawah ini
Tabel 1 Rencana jadwal kegiatan
N
5 Penulisan laporan skripsi dan revisi
6 Persiapan seminar skripsi
7 Perbaikin seminar skripsi
8 Ujian akhir
DAFTAR PUSTAKA
Bolton, W. 2004. Instrumentation and Control Sytems. Elseiver Ltd. The boulevard, Langford lane kdilington, OX5 16 B England. Diterjemahkan oleh Soni Astranto. Penerbit Erlangga. Jakarta.
Asnil dan Husnaini, I. (2010).Sistem Kontrol Optimal Pada Kontrol Posisi Motor DC. Jurnal Teknik Energi. 6 (1):1-11.
Kadaffi, M. (2011). Penerapan Simulink Untuk Simulasi . Modul . Fakultas Teknik Industri Universitas Mercu Buana.
Pakpahan, Wahyu. P & Dermawan , Dwi. Y (2011). Pemodelan Dinamis Pengaturan Posisi Motor DC Berbeban Menggunakan Pid Fuzzy. Project Work. Jurusan Teknik Kelistrikan Kapal. Program Studi Teknik Otomasi. Politeknik Perkapalan Negeri Surabaya .Institut Teknologi Sepuluh Nopember.
Phillips, L. Charles, 1995, Digital control System, 3rd Edition, Prentice Hall International. Inc.
The MathWorks, Inc. (2013). Arduino Support from Simulink. http://www.mathworks.com/hardware-support/arduino-simulink.html. (Di akses pada 28 Oktober 2013).
The MathWorks, Inc. (2013). Matlab & Simulink Installation Guide.
Djuandi, Feri. (2011). Pengenalan Arduino.
http://www.tobuku.com/docs/Arduino-Pengenalan.pdf. (Di akses pada 4