i
KENDALI SENAPAN MENGGUNAKAN
GYROSCOPE
DAN
ACCELEROMETER
PADA ROBOT SENTINEL
PROPOSAL
TUGAS AKHIR
Untuk Memenuhi Persyaratan Memperoleh Sebutan Ahli Madya
Oleh :
Yoga Setya Hanggara
NIM: 144300154
PROGRAM DIPLOMA III
PROGAM STUDI TEKNIK KOMPUTER KONTROL
JURUSAN TEKNIK
ii
LEMBAR PERSETUJUAN
PROPOSAL TUGAS AKHIR
KENDALI SENAPAN MENGGUNAKAN
GYROSCOPE
DAN
ACCELEROMETER
PADA ROBOT SENTINEL
Oleh :
YOGA SETYA HANGGARA NIM : 144300154
Pembimbing I
(Sukamto, S.T., M.T.) NIP. 197811142014041001
Pembimbing II
(Dirvi Eko Juliando, S.Pd., M.T.) NIP. 198307202014041001
Ketua Jurusan
iii
LEMBAR PENGESAHAN
PROPOSAL TUGAS AKHIR
KENDALI SENAPAN MENGGUNAKAN
GYROSCOPE
DAN
ACCELEROMETER
PADA ROBOT SENTINEL
Oleh:
iv DAFTAR ISI
HALAMAN SAMPUL ... i
LEMBAR PERSETUJUAN ... ii
LEMBAR PENGESAHAN ... iii
v
DAFTAR GAMBAR
A.
Gambar 1. Arduino Mega ... 3
Gambar 2. Arduini Pro Mini... ... 4
Gambar 3. Sensor MPU 6050 ... 5
Gambar 4. Radio Frekuensi ... 7
Gambar 5. Motor servo ... 8
Gambar 6. Diagram Kerja Visual ... 10
Gambar 7. Diagram Kerja Sistem ... 10
Gambar 8. Flowchart Utama ... 11
Gambar 9. Flowchart Eksekusi Senapan ... 12
Gambar 10. Flowchart Kendali Senapan ... 12
B.LATAR BELAKANG
Robot adalah peralatan mekanik yang dapat melakukan tugas fisik, baik menggunakan pengawasan dan kontrol manusia, ataupun menggunakan program yang telah didefenisikan terlebih dahulu pada sebuah chip atau memori. Robot memiliki manfaat yang sangat banyak dan telah menjadi bagian dalam kehidupan manusia pada era modern ini, seperti contoh pada sebuah kemiliteran. Segi keamanan adalah hal utama yang harus ditingkatkan pada bidang kemiliteran, salah satunya adalah ketika pengintaian dan penyergapan
pada markas teroris. Kondisi markas yang tidak dapat diprediksi membuat tidak terjaminnya keselamatan pasukan anti teror baik dari serangan teroris ataupun jebakan sekitar markas teroris. Untuk meningkatkan keamanan tersebut perlu dibuatnya sebuah robot yang bisa digunakan untuk pengintaian dan penyergapan.
Pada masalah yang diangkat, perlu dicarikan solusi dengan menerapkan teknologi dalam bidang telemetri dan otomatisasi. Maka di buatlah “Kendali Senapan Menggunakan Gyroscope dan Accelerometer Pada Robot Sentinel” yang bertujuan untuk pengendalian senapan dimana senapan dapat dikendalikan ke arah objek sesuai dengan pergerakan anggota badan, pengendalian ini dapat dilakukan dengan jarak cukup jauh.
Sensor Gyroscope dan Accelerometer merupakan motion detector atau sebuah sensor yang dapat mengambil data pada saat terjadi sebuah pergerakan, sensor ini dapat menggantikan peranan indra peraba (tangan) prajurit. Pada Tugas Akhir ini akan dibangun sebuah sistem pengendalian senjata dimana senjata akan mengikuti pergerakan dari prajurit dengan bantuan sensor
2
C.RUMUSAN MASALAH
Dari latar belakang yang telah diuraikan, dapat dirumuskan permasalahan sebagai berikut:
1. Bagaimana merancang dan membuat sistem kendali senapan menggunakan Gyroscope dan Accelerometer?
2. Bagaimana membuat sistem komunikasi jarak jauh menggunakan Radio Frekuensi?
D.BATASAN MASALAH
Agar pembahasan tidak menyimpang dari pokok perumusan masalah yang ada, maka dibuat batasan masalah sebagai berikut:
1. Pergerakan senapan di kendalikan dengan sensor Gyroscope dan
Accelerometer.
2. Pergerakan senapan sesuai dengan pergerakan maksimal putaran servo yaitu 180 derajat.
3. Image Processing tidak termasuk dalam kajian, kamera digunakan untuk memberi informasi objek yang berada di depan senapan.
4. Jarak komunikasi merupakan jarak dimana radio frekuensi dapat bekerja dengan baik (maksimal 70 meter tanpa halangan).
E.TUJUAN
Alat ini dibuat dengan memiliki tujuan sebagai berikut:
1. Merancang dan membuat sistem kendali senapan jarak jauh menggunakan Gyroscope dan Accelerometer.
2. Membuat sistem komunikasi jarak jauh menggunakan Radio Frekuensi.
F. TINJAUAN PUSTAKA
tugas akhir tersebut. Salah satunya adalah dari referensi jurnal, dan teori lainnya dapat mengambil dari buku, internet atau dari catatan perkuliahan. Berikut ini adalah beberapa tinjauan yang digunakan sebagai rujukan dalam pengerjaan tugas akhir.
1. Arduino Mega
Arduino Mega adalah papan mikrokontroler berbasiskan ATmega2560. Arduino Mega2560 memiliki 54 pin digital input/output, dimana 15 pin
dapat digunakan sebagai output PWM, 16 pin sebagai input analog, dan 4 pin sebagai UART (port serial hardware), 16 MHz kristal osilator, koneksi USB, jack power, header ICSP, dan tombol reset. Ini semua yang diperlukan untuk mendukung mikrokontroler. Cukup dengan menghubungkannya ke komputer melalui kabel USB atau power dihubungkan dengan adaptor AC-DC atau baterai untuk mulai mengaktifkannya. Papan arduino mega 2560 ditunjukkan pada Gambar 1.
Gambar 1. Arduino mega
Sumber: http://family-cybercode.blogspot.co.id
Spesifikasi Arduino Mega :
Microcontroller : ATmega2560 Operating Voltage : 5V
Input Voltage (recommended) : 7-12V Input Voltage (limits) : 6-20V
4
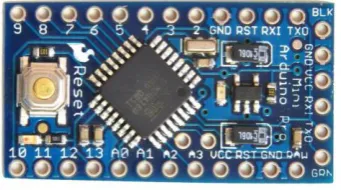
2. Arduino Pro Mini
Arduino Pro Mini adalah papan pengembangan (development board) mikrokontroler yang berbasis chip ATmega328P dengan bentuk yang sangat minimalis. Secara fungsi tidak ada bedanya dengan Arduino Uno, dan sangat mirip dengan Arduino Nano. Perbedaan utama terletak pada ketiadaan jack power DC dan konektor Mini-B USB, sehingga harus menggunakan modul FTDI atau USB to TTL untuk menghubungkan ke komputer. Arduino Pro Mini ditunjukkan pada Gambar 2.
Gambar 2. Arduino Pro Mini
Sumber: ecadio.com
Spesifikasi :
Chip mikrokontroller : ATmega328P
Tegangan operasi : 5V atau 3.3V (tergantung model)
Digital I/O pin : 14 buah, 6 diantaranya menyediakan PWM Analog Input pin : 6 buah
Arus DC per pin I/O : 40 mA
SRAM : 2 KB
EEPROM : 1 KB
Clock speed : 8 Mhz (model 3.3V) atau 16 Mhz (Model 5V) Dimensi : 33 mm x 18 mm
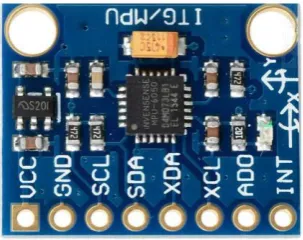
3. Sensor MPU 6050
MPU-6050 Module adalah sebuah modul berinti MPU-6050 yang merupakan 6 axis Motion Processing Unit dengan penambahan regulator
tegangan dan beberapa komponen pelengkap lainnya yang membuat modul ini siap dipakai dengan tegangan supply sebesar 3-5VDC. Modul ini memiliki interface I2C yang dapat disambungkan langsung ke MCU yang memiliki fasilitas I2C. Sensor MPU-6050 berisi sebuah MEMS
Accelerometer dan sebuah MEMS Gyroscope yang saling terintegrasi. Sensor MPU 6050 ditunjukkan pada Gambar 3.
Gambar 3. Sensor MPU 6050
Sumber:http://www.14core.com
Berikut adalah spesifikasi dari Modul ini :
1. Berbasis Chip MPU-6050 2. Supply tegangan berkisar 3-5V
3. Gyroscope range + 250 500 1000 2000 ° / s 4. Acceleration range: ± 2 ± 4 ± 8 ± 16 g 5. Communication standard I2C
6
7. Jarak antar pin header 2.54 mm 8. Dimensi modul 20.3mm x 15.6mm
4. Complementary Filter
Menggunakan 2 sumbu sensor accelerometer untuk mendapatkan nilai
kemiringan sudut (θ), yaitu sumbu X dan Z. Kemudian sudut kemiringan
dari accelerometer ini di umpankan ke low-pass filter untuk menghilangkan noise. Sedangkan keluaran sensor Gyroscope yang berupa kecepatan sudut
(ω) harus diintegralkan terlebih dahulu untuk mendapatkan nilai
perpindahan sudut atau sudut kemiringan. Kemudian diumpankan ke high-pass filter untuk menghilangkan efek bias pada gyroscope.
Jika complementary filter ini diaplikasikan ke bahasa pemrograman, maka akan ditunjukkan pada Persamaan 1.
sudut = (a)*(sudut+outgyro*dt)+(1-a)*(sudutacc) . . . . (1)
Keterangan :
A = koefisien filter
dt = waktu sampling, disesuaikan dengan waktu sampling nilai sensor sudut = sudut keluaran complementary filter
outgyro = keluaran sensor gyroscope berupa kecepatan sudut sudutacc = keluaran sensor accelerometer yang sudah berupa sudut
5. Radio Frekuensi
Modul transmisi RF (Radio Frequency) dengan modulasi ASK (amplitude-shift-keying) ini beroperasi pada frekuensi 433 MHz, merupakan modul elektronika yang ekonomis untuk aplikasi pengendali nirkabel /
wireless controller.
2. Arus pada moda statis / quiescent current: 4 mA 3. Frekuensi operasional: 433,92 MHz
4. Lebar pita frekuensi / bandwidth: 2 MHz 5. Moda modulasi: OOK / ASK
6. Sensitivitas: -105 dB
Spesifikasi Modul Pengirim / RF Transmitter: 1. Catu daya: 3-12 Volt DC
2. Arus pada saat mengirimkan sinyal: 20-28 mA 3. Frekuensi operasional: 433,92 MHz ±150kHz
4. Kekuatan transmisi: 40 mW (16 dBm) pada tegangan 12V, dapat mencapai hingga 90 meter pada kondisi tanpa halangan
5. Kecepatan transmisi maksimum: 9,6 kbps (direkomendasikan untuk menggunakan kecepatan di bawah 2400 bps untuk hasil yang optimum)
6. Moda modulasi: ASK 7. Moda resonansi: SAW
8. Rentang suhu operasional: -10 ~ +70 9. Ukuran: 19 × 19 × 8mm
Radio frekuensi ditunjukkan pada Gambar 4.
Gambar 4. Radio Frekuensi
8
6. Motor Servo
Motor servo adalah sebuah motor yang memiliki 3 kabel. Masing-masing kabel digunakan sebagai catu daya, ground, dan kontrol. Motor ini terdiri dari sebuah motor DC, serangkaian gear, potensiometer, dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal (kaki kontrol) dari kabel motor servo.
Motor srvo ditunjukkan pada Gambar 5.
Gambar 5. Bentuk Motor Servo
Sumber:http://zonaelektro.net/motor-servo/
G.METODOLOGI PENELITIAN
Pada bagian ini berisi tentang metode yang digunakan dalam pembuatan Tugas Akhir, bahan atau materi, data yang dibutuhkan, rancangan desain alat, dan gambaran diagram alir.
1. Studi pustaka
2. Penentuan spesifikasi alat
Agar dapat mempermudah dalam merencanakan dan membuat suatu alat, maka diperlukan penentuan spesifikasi alat dengan memilih komponen - komponen yang akan digunakan.
3. Bahan atau Materi
Bahan atau materi yang mendukung dalam pembuatan Tugas Akhir berasal dari jurnal, serta teori lainnya yang di ambil dari buku, internet dan
dari catatan perkuliahan.
4. Komponen Yang Digunakan
Berikut merupakan beberapa komponen yang digunakan dalam pembuatan Tugas Akhir:
1. Arduino Uno 2. Arduino Pro Mini
3. Sensor Gyroscope dan Accelerometer
4. Radio frekuensi 5. Motor Servo 6. Virtual Reality
7. Smartphone (OS. Android) 8. Action Camera
Berikut merupakan variabel yang akan menjadi objek penelitian: 1. Besaran sudut sensor Gyroscope dan Accelerometer
10
6. Diagram Kerja
Pada perancangan alat terdapat dua diagram kerja, dimana kedua diagram kerja tidak terjadi komunikasi data. Berikut merupakan diagram kerja alat:
1. Diagram kerja sistem visual
Sistem ini bekerja menampilkan apa yang di tangkap oleh action camera ke android dengan bantuan wireless connection. Diagram kerja sistem visual ditunjukkan pada Gambar 6.
Gambar 6. Diagram kerja sistem visual
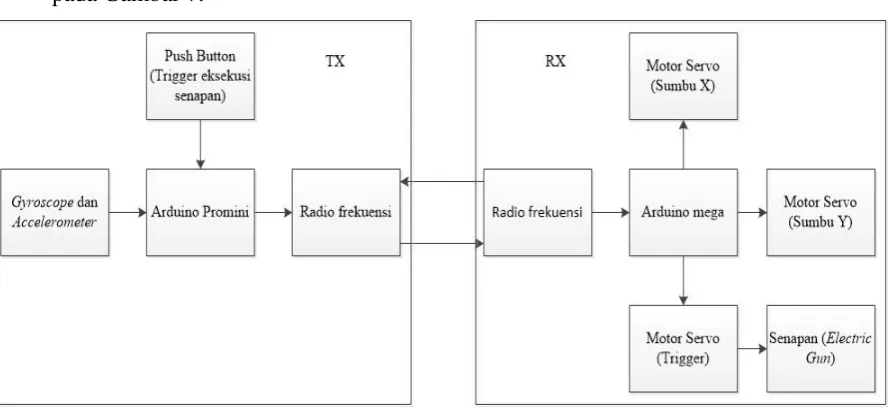
2. Diagram kerja sistem kendali
Sistem ini bekerja dengan membaca besaran sudut dari sensor
Gyroscope dan Accelerometer, dimana pergerakan senapan akan sama dengan pergerakan sensor. Terdapat push button yang di gunakan untuk eksekusi senapan, dimana bagian TX dan RX di hubungkan dengan komunikasi radio frekuensi. . Diagram kerja sistem kendali ditunjukkan pada Gambar 7.
Pada bagian RX senapan di gerakkan oleh 3 motor servo. Motor servo pertama digunakan untuk gerak naik turun, motor servo kedua digunakan untuk gerak kiri kanan, dan motor servo ketiga digunakan untuk melakukan tembakan.
7. Flowchart
Pada perancangan alat terdapat 3 bagian flowchart yaitu flowchart utama, flowchart eksekusi senapan, dan flowchart kendali gerak senapan.
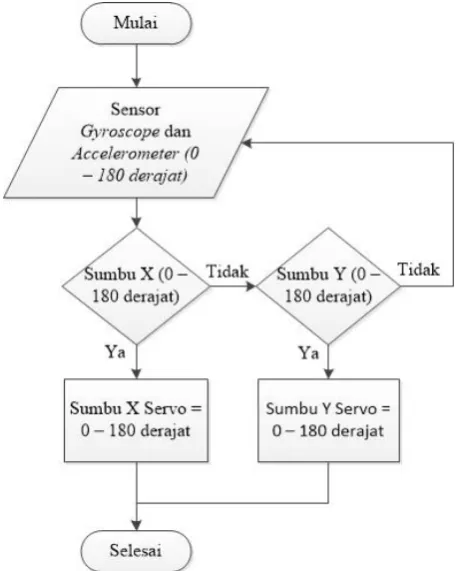
1. Flowchart Utama
Flowchart utama merupakan flowchart dari keseluruhan sistem.
Flowchart utama ditunjukkan pada Gambar 8.
12
2. Flowchart Eksekusi Senapan
Flowchart eksekusi senapan ditunjukkan pada Gambar 9.
Gambar 9. Flowchart eksekusi senapan
3. Flowchart Kendali Gerak Senapan
Flowchart kendali gerak senapan ditunjukkan pada Gambar 10.
8. Desain Alat
Dalam perancangan alat, desain di bagi menjadi 2 bagian, yaitu bagian TX dan bagian RX. Desain alat ditunjukkan pada Gambar 11.
(A)
(B)
14
H.JADWAL TUGAS AKHIR
Jadwal Tugas Akhir dibuat agar alat yang dibuat sesuai dengan waktu yang telah dijadwalkan. Jadwal Tugas Akhir dapat dilihat pada Tabel 1.
Tabel 1. Jadwal tugas akhir
I. RENCANA ANGGARAN BIAYA
Rencana Anggaran Biaya diperlukan untuk memperkirakan harga komponen yang diperlukan dalam pembuatan tugas akhir. Rencana Anggaran Biaya dapat dilihat pada Tabel 2.
Tabel 2. Rencana anggaran biaya
No Nama Barang Satuan Harga Jumlah
1 Arduino Mega 1 Unit Rp.200.000 Rp. 200.000 2 Arduino Pro Mini 1 Unit Rp.50.000 Rp. 50.000
3 Sensor Gyroscope dan
Accelerometer 1 Unit Rp.100.000 Rp. 100.000
DAFTAR PUSTAKA
Ardianto, Heri, & Aan Darmawan. (2016). Arduino Belajar Cepat dan Pemrograman. Badung: Informatika Bandung.
ASK-Modulation Wireless RF Transceiver Modules 433 MHz. (2017). http://www.vcc2gnd.com/sku/RFASK433. Diakses Januari 2017.
Berkenalan dengan Arduino Pro Mini. (2016). http://ecadio.com/belajar-dan-mengenal-arduino-pro-mini. Diakses Januari 2017.
GY-521 MPU-6050 Module 3 Axis gyro + 3 Axis Accelerometer. (2016). https://www.indo-ware.com/produk-2838-gy521-mpu6050-module-3-axis-gyro--3-axis. accelerometer.html. Diakses Januari 2017.
Kadir, Abdul. (2015). From Zero to a Pro Arduino. Yogyakarta: CV.Andi Offset.
Motor Servo. (2014). http://zonaelektro.net/motor-servo/. Diakses Januari 2017.
Wisnuwardhana. (2014). Gryoscope dan accelerometer.