3
II. TINJAUAN PUSTAKA
2.1 Sistem Irigasi Kendi
Sistem Irigasi Kendi merupakan salah satu bentuk pemberian air pada tanaman melalui zona perakaran tanaman. Irigasi kendi ini dapat menghemat penggunaan air dengan cara mengatur melalui sifat porositas kendi. Secara operasional, kendi ditanam di bawah tanah dekat dengan zona perakaran tanaman. Jumlah kendi yang ditanam tergantung pada jenis tanaman, kebutuhan air tanaman, suplai air serta porositas tanah dan kendi. Sistem irigasi ini dapat menghemat pemakaian air untuk tanaman di daerah kering dari hasil penelitian menunjukkan distribusi kelembaban tanah dan profil kelembaban tanah selama irigasi dimana jarak horizontal pembasahan mencapai 20 cm dari dinding kendi dan 60 cm secara vertikal setelah terjadi kondisi seimbang. Sehingga mencapai kondisi setimbang dibutuhkan waktu 24 jam setelah irigasi.
Gambar 1. Sistem Irigasi Kendi (Setiawan 2010)
Sistem irigasi kendi (pitcher irrigation), telah banyak dikembangkan sebagai upaya meningkatkan effisiensi penggunaan air irigasi. Penggunaan sistem irigasi kendi antara lain sudah dilakukan pada tanaman melon di India (Mondal, 1974), irigasi di Pakistan (Soomoro, 2002) dan irigasi kendi untuk tanaman hortikultura lahan kering di Indonesia (Setiawan, et al, 1998; Saleh dan Setiawan, 2002; Setiawan, 2000).
Mekanisme pengisian air ke dalam kendi dengan memasukkan air yang berasal dari air hujan atau sumber air lainnya melalui selang air. Pada waktu musim kering dimana ketersediaan air di dalam tanah berkurang, maka air dalam kendi akan mengalir ke luar melalui pori-pori kendi sesuai dengan prinsip hukum keseimbangan tekanan air di dalam tanah.
4 Irigasi kendi di Indonesia sudah dikembangkan sejak tahun 1996. Penelitian irigasi kendi ini dengan membenamkan kendi dalam tanah pasir berlempung untuk melihat rembesannya. Kendi yang digunakan mempunyai konduktivitas hidrolik jenuh K kendi 3.935x10-10 cm/detik dan hasil rembesan pada saat awal irigasi 1.25 L / hari dan menurun hingga menjadi konstan antara 0.5-0.6 L / hari.
Sedangkan penelitiaan irigasi kendi oleh Setiawan (1996) dengan simulasi distribusi kelembaban tanah menggunakan kelembaban numerik metode beda hingga menunjukkan bahwa distribusi kelembaban tanah ke arah radial dan vertikal berkolerelasi positip dengan K kendi. Apabila K kendi dilakukan di rumah tanaman dengan mengamati laju pembasahan tanah disekitar kendi. Distribusi kelembaban tanah hasil simulasi dan percobaannya penelitiaan dibatasi pada kajian distribusi dan profil kelembaban tanah. Kandungan air tanah dinyatakan sebagai kelembaban tanah dalam bentuk hisapan (h). Model simulasi gerakan air dalam dinding kendi dan tanah dianalisis dengan pendekatan sistem koordinat silender dan simetris putar. Metode numerik elemen hingga digunakan untuk solusi dari model simulasi yang tujuannya untuk mendapatkan distribusi kelembaban tanah dan profilnya untuk menentukan zone penanamn tanaman.
Osmosis adalah peristiwa perpindahan molekul-molekul zat dari larutan berkonsentrasi rendah ke larutan berkonsentrasi tinggi melalui suatu membran semipermeabel tanpa menggunakan energi (transpor pasif). Sedangkan Difusi adalah peristiwa perpindahan molekul-molekul suatu zat dari larutan berkonsentrasi tinggi ke larutan berkonsentrasi rendah tanpa menggunakan energi (transport pasif).
2.2 Sistem Kontrol
2.2.1 Pengertian Sistem Kontrol
Sistem kendali atau sistem kontrol (control sistem) adalah suatu alat (kumpulan alat) untuk mengendalikan, memerintah, dan mengatur keadaan dari suatu sistem. Dalam industri,sistem kontrol merupakan sebuah sistem yang meliputi pengontrolan variabel-variabel seperti temperatur (temperature), tekanan (pressure), aliran (flow), level, dan kecepatan (speed). Untuk mengimplentasikan teknik sistem kontrol (Sistem Control
Engineering) dalam industri diperlukan banyak keahlian atau keilmuan seperti dibidang:
teknologi mekanik (mechanical engineering), teknik elektrik (electrical engineering), elektronik (electronics) dan sistem pneumatik (pneumaticsistems). Ada dua konsep dasar dalam sistem kontrol yang dikenal yaitu sistem kontrol lup terbuka (open-loop control
system) atau umpan-maju (feedforward) dan sistem kontrol lup tertutup (closed-loop control system) atau umpan-balik (feedback) (Hordeski, 1994).
1. Sistem kontrol secara manual
Sistem kontrol secara manual, proses pengaturannya dilakukan secara manual oleh operator dengan mengamati keluaran secara visual, kemudian dilakukan koreksi variabel-variabel kontrolnya untuk mempertahankan hasil keluarannya. Sistem kontrol itu sendiri bekerja secara open loop, yang berarti sistem kontrol tidak dapat melakukan koreksi variabel untuk mempertahankan hasil keluarannya. Perubahan ini dilakukan secara manual oleh operator setelah mengamati hasil keluarannya melalui alat ukur atau indikator.
2. Sistem kontrol otomatis
Sistem kontrol otomatis dapat melakukan koreksi variabel-variabel kontrolnya secara otomatis, dikarenakan ada untai tertutup (closed loop) sebagai umpan balik (feedback) dari hasil keluaran menuju ke masukan setelah dikurangkan dengan nilai set pointnya.
5 Pengaturan secara untai tertutup ini (closed loop) tidak memerlukan operator untuk melakukan koreksi variabel-variabel kontrolnya karena dilakukan secara otomatis dalam sistem kontrol dalam sistem kontrol itu sendiri (Siswoyo, 2007).
Dengan demikian keluaran akan selalu dipertahankan berada pada kondisi stabil sesuai dengan set point yang ditentukan. Secara umum, sistem kontrol lup tertutup terdiri dari (Mahalik, 2004):
Plant : sistem atau proses yang akan dikontrol yaitu aktuator Input : nilai referensi yang diinginkan atau disebut set point
Alat ukur : alat pengukur yang berfungsi memberikan informasi keadaan yang sebenarnya disebut sensor
Pengontrol : alat/program yang mampu merespon sinyal kontrol agar menghasilkan output yang respek terhadap setpoint dan mengukur present
value sehingga menghasilkan isyarat error.
Output : keluaran yang telah dikendalikan dan dihasilkan oleh sistem.
Gambar 2. Kontrol lup tertutup
Dalam sebuah kontrol otomatis suatu kondisi terkontrol (controlled condition) dapat berupa temperatur, tekanan, kelembaban, level, atau aliran. Hal ini mengartikan bahwa elemen pengukuran dapat berupa sensor temperatur, transduser tekanan atau tramitter, detektor level, sensor kelembaban atau sensor aliran. Sementara variabel manipulasinya dapat berupa uap air, air, udara, listrik, minyak atau gas, sedangkan perangkat terkontrol dapat berupa sebuah klep, damper (penghadang), pompa atau kipas angin.
2.2.2 Sensor
Sensor adalah alat untuk mendeteksi/mengukur sesuatu, yang digunakan untuk mengubah variasi mekanis, magnetis, panas, sinar dan kimia menjadi tegangan dan arus listrik. Dalam lingkungan sistem pengendali dan robotika, sensor memberikan kesamaan yang menyerupai mata, pendengaran, hidung, lidah yang kemudian akan diolah oleh kontroler sebagai otaknya.
Sensor dalam teknik pengukuran dan pengaturan secara elektronik berfungsi mengubah besaran fisik (misalnya: temperatur, gaya, kecepatan putaran) menjadi besaran listrik yang proposional. Sensor dalam teknik pengukuran dan pengaturan ini harus memenuhi persyaratan-persyaratan kualitas yakni:
6 Linieritas: Konversi harus benar-benar proposional, jadi karakteristik konversi
harus linier.
Tidak tergantung temperatur: Keluaran konverter tidak boleh tergantung pada temperatur di sekelilingnya, kecuali sensor suhu.
Kepekaan: Kepekaan sensor harus dipilih sedemikian, sehingga pada nilai-nilai masukan yang ada dapat diperoleh tegangan listrik keluaran yang cukup besar. Waktu tanggapan: Waktu tanggapan adalah waktu yang diperlukan keluaran
sensor untuk mencapai nilai akhirnya pada nilai masukan yang berubah secara mendadak. Sensor harus dapat berubah cepat bila nilai masukan pada sistem tempat sensor tersebut berubah.
Batas frekuensi terendah dan tertinggi: Batas-batas tersebut adalah nilai frekuensi masukan periodik terendah dan tertinggi yang masih dapat dikonversi oleh sensor secara benar.
Stabilitas waktu: Untuk nilai masukan (input) tertentu sensor harus dapat memberikan keluaran (output) yang tetap nilainya dalam waktu yang lama.
Histerisis: Gejala histerisis yang ada pada magnetisasi besi dapat pula dijumpai pada sensor. Misalnya, pada suatu temperatur tertentu sebuah sensor dapat memberikan keluaran yang berlainan.
(Septiawan, 2010).
Empat sifat diantara syarat-syarat dia atas, yaitu linieritas, ketergantungan pada temperatur, stabilitas waktu dan histerisis menentukan ketelitian sensor.
2.2.3 Kontrol On-Off
Dalam kontrol on-off, elemen pembangkit hanya mempunyai dua posisi tertentu yaitu on dan off. Kontrol on-off relatif sederhana dan tidak mahal dan dalam hal ini banyak digunakan dalam sistem kontrol industri maupun domestik.
Ambil sinyal keluaran dari kontroler u(t) tetap pada salah satu nilai maksimum dan minimum tergantung apakah sinyal pembangkit kesalahan positif atau negatif, sehingga
u(t) = U1 untuk e(t)>0 = U2 untuk e(t)<0
dengan U1 dan U2 konstan. Nilai minimum U2 biasanya nol atau –U1. Kontroler on-off umumnya merupakan perangkat listrik dan sebuah katup yang dioperasikan dengan selenoida. Kontroler pneumatik proporsional dengan penguatan yang sangat tinggi bereaksi sebagai kontroler on-off dan terkadang disebut juga kontroler pneumatik on-off.
(a) (b)
Gambar 3. (a) Diagram blok kontroler on-off; (b) diagram blok kontroler on-off dengan jurang differensial
7 Gambar 3 (a) dan 3 (b) menunjukkan diagram blok kontroler on-off. Daerah dengan sinyal pembangkit kesalahan yang digerakkan sebelum terjadi switching disebut jurang differensial. Jurang differensial ditunjukkan pada Gambar 3 (b). suatu jurang differensial menyebabkan keluaran kontroler u(t) tetap pada nilai awal sampai sinyal pembangkit kesalahan telah bergerak mendekati nilai nol. Dalam beberapa kasus jurang differensial terjadi sebagai akibat adanya penghalang yang tidak dikehendaki dan gerakan yang hilang, sering juga hal ini dimaksudkan untuk mencegah operasi yang berulang-ulang dari mekanisme on-off.
2.2.4 Relay
Relay merupakan salah satu perangkat elektronik yang sering digunakan dalam
membuat suatu perangkat keras. Dalam dunia elektronika, relay dikenal sebagai komponen yang dapat mengimplementasikan logika switching. Sebelum tahun 70-an, relay merupakan “otak” dari rangkaian pengendali. Baru setelah itu muncul PLC yang mulai menggantikan posisi relay. Relay yang paling sederhana ialah relay elektromekanis yang memberikan pergerakan mekanis saat mendapatkan energi listrik (Wicaksono, 2010). Secara sederhana
relay elektromekanis ini didefinisikan sebagai berikut:
Alat yang menggunakan gaya elektromagnetik untuk menutup (atau membuka) kontak saklar.
Saklar yang digerakkan (secara mekanis) oleh daya/energi listrik.
Gambar 4. Relay yang beredar di pasaran
Sumber: Killian, 1996
Secara umum, relay digunakan untuk memenuhi fungsi-fungsi berikut:
Remote control: dapat menyalakan atau mematikan alat dari jarak jauh.
Penguatan daya: menguatkan arus atau tegangan (Contoh: starting relay pada mesin mobil).
Pengatur logika kontrol suatu sistem. Prinsip Kerja dan Simbol
Relay terdiri dari coil dan contact. Perhatikan Gambar 5. coil adalah gulungan kawat
yang mendapat arus listrik, sedang contact adalah sejenis saklar yang pergerakannya tergantung dari ada tidaknya arus listrik di coil. Contact ada 2 jenis: Normally Open (kondisi awal sebelum diaktifkan open), dan Normally Closed (kondisi awal sebelum diaktifkan
close). Secara sederhana berikut ini prinsip kerja dari relay: ketika Coil mendapat energi
listrik (energized), akan timbul gaya elektromagnet yang akan menarik armature yang berpegas, dan contact akan menutup.
8 Gambar 5. Skema relay elektromekanik
Sumber: Killian, 1996
Selain berfungsi sebagai komponen elektronik, relay juga mempunyai fungsi sebagai pengendali sistem, sehingga relay mempunyai 2 macam symbol yang digunakan pada:
Rangkaian listrik (hardware) Program (software)
Simbol yang digunakan pada relay adalah:
Gambar 6. Rangkaian dan simbol logika relay
Sumber: Killian, 1996
Simbol selalu mewakili kondisi relay tidak dienergized.
Relay sebagai pengendali
Salah satu kegunaan utama relay dalam dunia industri ialah untuk implementasi logika kontrol dalam suatu sistem. Sebagai “bahasa pemrograman” digunakan konfigurasi yang disebut ladder diagram atau relay ladder logic. Relay ladder logic (ladder diagram) memiliki:
Diagram wiring yang khusus digunakan sebagai bahasa pemrograman untuk rangkaian kontrol relay dan switching.
LD Tidak menunjukkan rangkaian hardware, tapi alur berpikir. LD Bekerja berdasar aliran logika, bukan aliran tegangan/arus.
9
Relay Ladder Logic terbagi menjadi 3 komponen yaitu:
1. Input: pemberi informasi 2. Logic: pengambil keputusan 3. Output: usaha yang dilakukan
Gambar 7. Diagram sederhana sistem kontrol berbasis relay
Dari Gambar 7. nampak bahwa sistem kendali dengan relay ini mempunyai input
device (misalnya: berbagai macam sensor, switch) dan output device (misalnya : motor,
pompa, lampu). Dalam rangkaian logikanya, masing-masing input, output, dan semua komponen yang dipakai mengikuti standard khusus yang unik dan telah ditetapkan secara internasional.
Pada Gambar 8. dapat dilihat aplikasi relay untuk membentuk gerbang – gerbang logika sederhana (AND, OR, NOT, dan latching).
Gambar 8. Relay untuk membentuk gerbang logika
10 Sebagai pengendali, relay dapat mengatur komponen-komponen lain yang membentuk suatu kendali di industri, diantaranya: switch, timer, counter, sequencer, dan lain-lain.
2.2.5 Solenoid Valve
Solenoid valve adalah katup yang digerakan oleh energi listrik, mempunyai
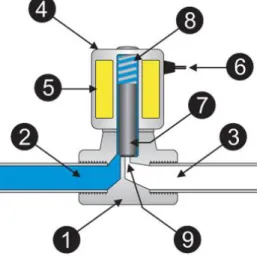
kumparan sebagai penggeraknya yang berfungsi untuk menggerakan piston yang dapat digerakan oleh arus AC maupun DC, solenoid valve atau katup (valve) solenoida mempunyai lubang keluaran, lubang masukan dan lubang exhaust, lubang masukan, berfungsi sebagai terminal / tempat cairan masuk atau supply, lalu lubang keluaran, berfungsi sebagai terminal atau tempat cairan keluar yang dihubungkan ke beban, sedangkan lubang exhaust, berfungsi sebagai saluran untuk mengeluarkan cairan yang terjebak saat piston bergerak atau pindah posisi ketika solenoid valve bekerja. Struktur solenoid valve disajikan pada Gambar 9.
Prinsip kerja dari solenoid valve/katup (valve) solenoida yaitu katup listrik yang mempunyai koil sebagai penggeraknya dimana ketika koil mendapat supply tegangan maka koil tersebut akan berubah menjadi medan magnet sehingga menggerakan piston pada bagian dalamnya ketika piston berpindah posisi maka pada lubang keluaran dari solenoid valve akan keluar cairan yang berasal dari supply, pada umumnya solenoid valve mempunyai tegangan kerja 100/200 VAC namun ada juga yang mempunyai tegangan kerja DC.
Gambar 9. Struktur fungsi solenoid valve Keterangan:
1. Valve body
2. Terminal masukan (inlet port) 3. Terminal keluaran (outlet port)
4. Koil solenoid
5. Kumparan
6. Kabel suplai tegangan
7. Plunger 8. Spring
9. Lubang / exhaust
11
2.3 Mikrokontroler
2.3.1 Pengertian Mikrokontroler
Mikrokontroler adalah sebuah sistem komputer fungsional dalam sebuah chip. Di dalamnya terkandung sebuah inti prosesor, memori (sejumlah kecil RAM, memori program, atau keduanya), dan perlengkapan input output.
Dengan kata lain, mikrokontroler adalah suatu alat elektronika digital yang mempunyai masukan dan keluaran serta kendali dengan program yang bisa ditulis dan dihapus dengan cara khusus, cara kerja mikrokontroler sebenarnya membaca dan menulis data. Mikrokontroler merupakan komputer didalam chip yang digunakan untuk mengontrol peralatan elektronik, yang menekankan efisiensi dan efektifitas biaya. Secara harfiahnya bisa disebut “pengendali kecil” dimana sebuah sistem elektronik yang sebelumnya banyak memerlukan komponen-komponen pendukung seperti IC TTL dan CMOS dapat direduksi/diperkecil dan akhirnya terpusat serta dikendalikan oleh mikrokontroler ini.
Mikrokonktroler digunakan dalam produk dan alat yang dikendalikan secara automatis, seperti sistem kontrol mesin, remote controls, mesin kantor, peralatan rumah tangga, alat berat, dan mainan. Dengan mengurangi ukuran, biaya, dan konsumsi tenaga dibandingkan dengan mendesain menggunakan mikroprosesor memori, dan alat input output yang terpisah, kehadiran mikrokontroler membuat kontrol elektrik untuk berbagai proses menjadi lebih ekonomis.
Beberapa keuntungan menggunakan mikrokontroler: Sistem elektronik akan menjadi lebih ringkas
Rancang bangun sistem elektronik akan lebih cepet karena sebagian besar dari sitem adalah perangkat lunak yang mudah dimodifikasi.
Pencarian gangguan lebih mudah ditelusuri karena sistemnya yang kompak
Namun demikian tidak sepenuhnya mikrokontroler bisa mereduksi komponen IC TTL dan CMOS yang seringkali masih diperlukan untuk aplikasi kecepatan tinggi atau sekedar menambah jumlah saluran masukan dan keluaran (I/O). Dengan kata lain, mikrokontroler adalah versi mini atau mikro dari sebuah komputer karena mikrokontroler sudah mengandung beberapa periferal yang langsung bisa dimanfaatkan, misalnya port
paralel, port serial, komparator, konversi digital ke analog (DAC), konversi analog ke digital dan sebagainya hanya menggunakan sistem minimum yang tidak rumit atau
kompleks.
Agar sebuah mikrokontroler dapat berfungsi, maka mikrokontroler tersebut memerlukan komponen eksternal yang kemudian disebut dengan sistem minimum. Untuk membuat sistem minimal paling tidak dibutuhkan sistem clock dan reset, walaupun pada beberapa mikrokontroler sudah menyediakan sistem clock internal, sehingga tanpa rangkaian eksternal pun mikrokontroler sudah beroperasi.Untuk merancang sebuah sistem berbasis mikrokontroler, kita memerlukan perangkat keras dan perangkat lunak, yaitu:
1. Sistem minimal mikrokontroler
2. Software pemrograman dan kompiler, serta downloader.
Yang dimaksud dengan sistem minimal adalah sebuah rangkaian mikrokontroler yang sudah dapat digunakan untuk menjalankan sebuah aplikasi. Sebuah IC mikrokontroler
12 tidakakan berarti bila hanya berdiri sendiri. Pada dasarnya sebuah sistem minimal mikrokontroler AVR memiliki prinsip yang sama, yang terdiri dari 4 bagian, yaitu:
1. Prosesor, yaitu mikrokontroler itu sendiri.
2. Rangkaian reset agar mikrokontroler dapat menjalankan program mulai dari awal. 3. Rangkaian clock, yang digunakan untuk memberi detak pada CPU.
4. Rangkaian catu daya, yang digunakan untuk memberi sumberdaya.
Pada mikrokontroler jenis-jenis tertentu (AVR misalnya), poin-poin pada nomor 2 dan 3 sudah tersedia didalam mikrokontroler tersebut dengan frekuensi yang sudah diseting dari vendornya (biasanya 1MHz, 2MHz, 4MHz dan 8MHz), sehingga pengguna tidak perlu memerlukan rangkaian tambahan, namun bila ingin merancang sistem dengan spesifikasi tertentu (misal ingin komunikasi dengan PC atau handphone), maka pengguna harus menggunakan rangkaian clock yang sesuai dengan karakteristik PC atau HP tersebut, biasanya menggunakan kristal 11,0592 MHz, untuk menghasilkan komunikasi yang sesuai dengan baud rate PC atau HP tersebut.
2.3.2 Arduino
Arduino merupakan rangkaian elektronik yang bersifat open source, serta memiliki perangkat keras dan lunak yang mudah untuk digunakan. Arduino dapat mengenali lingkungan sekitarnya melalui berbagai jenis sensor dan dapat mengendalikan lampu, motor, dan berbagai jenis aktuator lainnya. Arduino mempunyai banyak jenis, di antaranya Arduino Uno, Arduino Mega 2560, Arduino Fio, dan lainnya.
(www.arduino.cc)
2.3.3 Arduino Uno
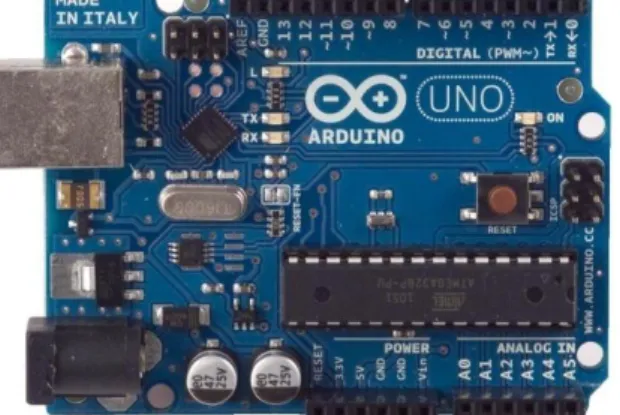
Arduino Uno dengan ATMega328P mempunyai 14 digital input/output (6 diantaranya dapat digunakan untuk PWM output), 6 analog inputs, 16 MHz clock speed, USB
connection, power jack, ICSP header, dan reset button. Skema Arduino Uno ATMega328P
disajikan pada Gambar 10. dengan ciri-ciri sebagai berikut: 1. Operating voltage 5V.
2. Rekomendasi input voltage 7-12V. 3. Batas input voltage 6-20V
4. Memiliki 14 buah digital input/output 5. Memiliki 6 buah Analog Input.
6. DC current setiap I/O Pin sebesar 40 mA. 7. DC current untuk 3.3V sebesar 50 mA. 8. Flash memory 32 KB.
9. SRAM 2 KB. 10. EEPROM 1 KB. 11. Clock Speed 16 MHz. (www.arduino.cc)
13 Gambar 10. Skema Arduino Uno
Skema Arduino Uno ATMega328P didasarkan pada blog diagram dari ATMega328P. Blog diagram tersebut disajikan pada Lampiran 2.
2.3.4 Memori-memori ATMega328P
Manajemen memori dalam mikrokontroler penting dilakukan karena memori yang dimiliki mikrokontroler sangat terbatas. Pada Atmega328P terdapat tiga jenis memori, yaitu data memori, program memori, dan EEPROM. BUS ketiga memori tersebut terpisah, sehingga dapat mengakses ketiga jenis memori tersebut dalam waktu yang bersamaan.
ATmega328P menggunakan Flash Memory untuk program memori. Flash Memory dibagi menjadi dua bagian, yaitu Boot Loader dan Aplication Program. Pembagian ini bertujuan untuk keamanan perangkat lunak. Flash Memory memiliki ketahanan tulis atau hapus sebanyak 10.000 kali. Program memory map disajikan pada Gambar 11.
Gambar 11. Program memory map ATMega328P
SRAM digunakan oleh ATMega328P untuk data memori. Kapasitas SRAM dari ATmega328P adalah 2KB. SRAM terbagi menjadi empat bagian yaitu 32 GPR (General
Purphose Register), 64 I/O register, Additional I/O register, dan Internal SRAM. Data memory map dari SRAM disajikan pada Gambar 12. Sifat dari memori ini adalah volatile
14 Gambar 12. Data memory map ATMega328P
EEPROM biasa digunakan untuk menyimpan data long-term karena sifatnya yang
non-volatile. Ketika tidak mendapat catu daya, data yang tersimpan dalam EEPROM tidak
akan hilang. EEPROM memiliki ketahanan tulis atau hapus sebanyak 10.000 kali. (Atmel 2009).
2.3.5 Arduino-0022
Arduino-022 merupakan open-source Arduino environtment yang digunakan untuk penulisan kode. Dengan menggunakan Arduino-022 penulisan kode menjadi mudah dan kode yang ditulis dapat diunggah ke Arduino. Software ini dapat digunakan di Windows, Mac OS X, dan Linux. Arduino environtment ditulis dalam bahasa Java dengan didasarkan pada Processing, avr-gcc, dan open source software lainnya. Bahasa pemrograman Arduino didasarkan pada bahasa pemrograman C/C++ serta terhubung dengan AVR Libc sehingga dapat menggunakan fungsi yang terdapat pada AVR Libc. AVR Libc berisi fungsi-fungsi yang digunakan untuk menggunakan AVR, seperti pengaturan register. Pada Arduino-0022 penggunaan AVR Libc dipermudah karena secara default library pada Arduino-Arduino-0022 sudah mencakup AVR Libc tanpa kita harus tau AVR Libc mana yang digunakan. Jika dalam penulisan kode membutuhkan AVR Libc, maka penambahan AVR Libc pada header kode program dapat dilakukan. Tampilan Ardino-0022 disajikan pada Gambar 13.
15 Gambar 13. Tampilan Arduino-0022
2.3.6 USART
USART (Universal Synchronous and Asynchronous Serial Receiver and
Transmitter) dapat difungsikan sebagai transmisi data sinkron dan asinkron. Sinkron berarti clock yang digunakan antara transmitter dan receiver satu sumber clock. Asinkron berarti transmitter dan receiver memunyai sumber clock yang berbeda. USART terbagi dalam tiga
blog yaitu clock generator, transmitter, dan receiver. (Ardi 2010).
Komunikasi serial ini penting difahami karena selain beberapa interface menggunakan mode serial, komunikasi ini bisa kita manfaatkan sebagai pemantau program saat berjalan (debugging). Misalkan kita akan menganalisis suatu kondisi suhu, ini bisa kita lihat dari monitor dengan ditransmisikan ke komputer secara serial (Ary et al 2008).
2.3.7 Serial Monitor
Pada Arduino-0022 terdapat serial monitor. Serial monitor berfungsi untuk menampilkan data yang terdapat pada Arduino. Selain itu, melalui Serial Monitor juga dapat mengirimkan data ke Arduino. Pengirim data ke Arduino dilakukan dengan cara memasukkan data yang ingin dikirim dan dan menekan tombol send atau menekan enter (www.arduino.cc).
Tampilan dari Serial Monitor disajikan pada Gambar 14. Baud-rate pada serial
monitor harus sama dengan Serial.begin pada kode program. Hal tersebut dilakukan agar
16 Gambar 14. Serial monitor
2.3.8 ADC
ADC atau kepanjangan dari Analog to Digital Converter merupakan alat yang digunakan untuk mengubah data analog menjadi data digital. Pada Arduino Uno sudah terdapat modul ADC, sehingga dapat langsung digunakan. Fitur ADC yang terdapat pada ATmega328P adalah sebagai berikut:
1. Resolusi mencapai 10-bit 2. 0,5 LSB Integral Non-linearity 3. Akurasi mencapai ± 2 LSB 4. Waktu konvensi 13-260 µs. 5. Mempunyai 6 saluran ADC
6. Optional Left Adjustment untuk pembacaan hasil ADC. 7. 0 – Vcc untuk kisaran input ADC
8. Disediakan 1,1V tegangan referensi ADC. 9. Mode konversi kontinyu atau konversi 10. Interupsi ADC
11. Sleep mode noise canceler
(Atmel, 2009).
Sinyal input dari port ADC akan dipilih oleh multiplexer (register ADMUX) untuk diproses oleh ADC. Karena converter ADC dalam chip hanya satu buah sedangkan saluran masukannya lebih dari satu, maka dibutuhkan multiplexer untuk memilih input port ADC secara bergantian. ADC memunyai rangkaian untuk mengambil sampel dan hold (menahan) tegangan input ADC, sehingga tetap dalam keadaan konstan selama proses konversi. Sinyal
input ADC tidak boleh melebihi tegangan referensi. Nilai digital sinyal input ADC untuk
resolusi 10-bit (1024) ditulis dalam Persamaan 1.
17 Nilai digital sinyal input ADC untuk resolusi 8-bit ditulis dalam persamaan 2:
Kode digital = (Vinput / Vref) x 256 (2)
(Andi, 2010).
Dengan demikian untuk mencari nilai digital, dapat dinyatakan dengan persamaan 3.
Kode digital = (Vinput / Vref) x resolusi (3)
2.3.9 Stackable SD Card Shield
Stackable SD card shield merupakan solusi untuk mengirim data ke memory SD card dan TF card. Stackable SD card shield disajikan pada Gambar 15.
Gambar 15. Stackable SD Card Shield
Pinout dari stackable SD card shield dapat dihubungkan ke Arduino Uno, sehingga
dapat bermanfaat untuk menambah kapasitas tempat penyimpanan data dan pencatatan data.
Stackable SD card shield ini dapat langsung dipasang pada Arduino dan terdapat switch
untuk memilih flash card slot. Keistimewaan dari stackable SD card shield ini adalah: 1. Terdapat modul untuk standar SD card dan Micro SD (TF) card.
2. Terdapat switch untuk memilih flash card slot. 3. Dapat dipasang langsung pada Arduino. (www.famosastudio.com)