RANCANG BANGUN TEMPAT SAMPAH BERBASIS IOT DENGAN KONSEP
PEMILAHAN DAN PEMADATAN SAMPAH PLASTIK SECARA OTOMATIS
Mochamad Donny Rinaldi 1, Herwin Junion Siboro 2, Ir. Arief Syaichu Rohman, M.Eng.Sc.,Ph.D 3, Syamsyarief Baqaruzi,S.T., M.T.4
1,2,3,4Program Studi Teknik Elektro, Jurusan Teknik Elektro, Informatika dan Sistem Fisika, Institut Teknologi Sumatera
[email protected], [email protected], [email protected], [email protected],
Abstract— pengolahan sampah merupakan suatu hal yang sangat dibutuhkan di waktu sekarang dan masa depan. Penumpukan sampah yang semakin hari semakin banyak terutama sampah sampah yang tidak dapat terurai dengan baik seperti plastik mengancam kelangsungan hidup kita sendiri. Oleh karena itu dibutuhkan alat yang dapat membantu mengurangi bahkan mengatasi penumpukan sampah tersebut. Lectrobin merupakan suatu alat pengolah sampah plastik yang dirancang mampu menyeleksi dan melakukan kompresi terhadap sampah hasil seleksi. Alat ini dilengkapi dengan sensor proximity induktif dan kapasitif sebagai penyeleksi sampah, piston elektrik sebagai alat kompresi, band heater sebagai wadah pemanasan sampah plastik sekaligus wadah penampungan sampah hasil seleksi, buzzer sebagai alarm peringatan sampah penuh, LED sebagai indikator setiap proses yang berlangsung pada alat. Selain itu alat ini juga dilengkapi dengan LCD sebagai media penampilan impormasi setiap proses yang dilakukan.
Kata kunci— sensor proximity kapasitif dan induktif, piston elektrik, band heater, Lectrobin.
I. PENDAHULUAN
Pada umumnya sampah selalu dikumpulkan secara kolektif dikumpulkan hingga ahirnya ditumpuk pada suatu tempat penumpukan yang lebih besar. Metode yang demikian membuat lahan penumpukan sampah setiap harinya semakin memprihatinkan. Secara tidak langsung sampah hasil tumpukan ini menyita banyak lahan yang harusnya dapat dipakai untuk kepentingan yang lebih baik. Ada beberapa cara yang coba dilakukan untuk mengatasi penumpukan sampah, salah satunya adalah pelabelan tempat sampah organik dan sampah anorganik. Cara ini memang sangat membantu mengingat sampah tumpukan sampah organik lebih gampang untuk diatasi dan bahkan menguntungkan jika diolah dengan baik. Yang menjadi masalah adalah tumpukan sampah plastik, penunpukan sampah plastik sejauh ini masih terlalu susah untuk diolah sehingga tumpukan sampah yang paling banyak
disebabkan oleh sampah sampah plastik. Didasari masalah tersebut kami membuat suatu rancangan alat yang mampu mengurangi bahkan mengatasi permasalahan tempat sampah. Alat ini kami sebut dengan Lectro-Bin (Electronik Dustbin For Plastic Waste). Alat ini dirancang mampu medeteksi sampah plastik dan sampah logam sehingga yang di terima bukan sampah bersifat logam. Hal ini memudahkan dalam pengolahan sampah plastik mengingat sampah plastik masih dapat diolah dengan konsep peleburan. Selain mampu mendeteksi sampah alat ini memiliki kelebihan dalam hal pengompresian sampah dengan bantuan piston elektrik dan band heater. Alat ini juga dilengkapi dengan LCD sebagai penampilan setiap proses yang dilakukan pada alat, LED sebagai indikator setiap proses yang berlangsung, serta buzzer sebagai metode peringatan pada saat tempat penampungan sampah penuh dan siap untuk dikompresi.
II. TEORI DASAR
A. Tempat Sampah Konvensional Tempat sampah konvensional biasanya biasanya bersifat sebagai wadah penampungan sampah sampah yang dikumpulkan dalam skala kecil. Tempat sampah konvensional biasanya di tempeli dengan label sampah organik dan anorganik, memiliki bentuk yang sederhana dan tampat ada pengaman atau suatu sistem yang dapat mengontrol tempat sampah tersebut. Cara pengecekan alat ini adalah dengan melihat langsung tempat sampah tersebut setiap hari apakah sampah masih dapat menjalankan fungsinya sebagai penampungan atau tidak. Ada beberapa aturan yangmendasari pengolahan sampah yaitu:
Sebelum UU No. 18 Tahun 2008
Paradigma lama penanganan sampah secara konvensional yang bertumpu pada proses pengumpulan, pengangkutan dan pembuangan akhir. Pengangkutan sampah, yaitu dari sumber sampah (kawasan perumahan, perkantoran, komersial,
industri, dan lainlain) langsung ke TPA [1] Setelah UU No. 18 Tahun 2008
Pola pengelolaan sampah tidak lagi mengandalkan pola “kumpul-angkut-buang”. Pola pengelolaan sampah beralih ke pola pengurangan dan pemanfaatan sampah sejak dari sumbernya, sehingga volume sampah yang dibuang ke TPA sudah sangat berkurang. [1]
B. Tempat Sampah Otomatis
Tempat sampah otomatis merupakan tempat sampah yang berfungsi sebagai tempat penampungan sampah sementara yang dapat melakukan fungsi fungsi tertentu secara otomatis. Tempat sampah otomatis ini tidak hanya berfungsi sebagai wadah penampungan saja seperti tempat sampah pada umumnya. Beberapa kelebihan tempat sampah otomatis yaitu dapat dikontrol dari jarak jauh, memiliki fitur pendeteksi kapasitas, memiliki fitur penampilan imformasi, memiliki kemampuan dalam membedakan sampah. Dan dapat mengolah sampah hasil seleksi tempat sampah itu sendiri. 1. Arduino Mega 2560
Arduino Mega 2560 ini merupakan mikrokontroler yang bertugas sebagai otak dari alat atau sistem yang dirancang. Arduino/Genuino mega 2560 adalah papan mikrokontroler berdasarkan ATmega2560. Device ini memiliki 54 digital pin input / output (yang 15 dapat digunakan sebagai output PWM), 16 analog input, 4 UART (hardware port serial), osilator kristal 16 MHz, koneksi USB, jack listrik, header ICSP, dan tombol resrt. [9]
Gambar 2. 1 Arduino Mega 2560[8]
2. Buzzer Pasif Continous Alarm
Buzzer ini memiliki spesifikasi memberikan peringatan melalui bunyi jarak dekat ke pengguna minimal jarak radius yang dapat didengar pengguna di sekitar produk yang memiliki kemampuan sound output 88-95 db.
Gambar 2. 2 Buzzer Pasif Continous Alarm
3. Relay JQC-3FF-S-Z pengerak door lock
Relay sebagai switching untuk menggerakkan door lock. Rangkaian relay beserta penggerak door lock adalah rangkaian modul relay 5-Volt DC dengan solenoid door lock, dimana relay yang di pakai ini digunakan untuk sebagai saklar untuk mengaktifkan solenoid door lock. Rangkaian relay yang di gunakan menggunakan input 12-volt yang di hubungkan pada common relay. Sedangkan untuk output digunakan normally open sehingga solenoid door lock akan terbuka dalam kondisi normal, dan saat relay mendapat masukan high dari microcontroller maka relay akan switch menjadi close sehingga solenoid door lock akan aktif. [10]
Gambar 2. 3 Relay JQC-3FF-S-Z[10]
Gambar 2. 4 Rangkainan Relay [10]
4. LCD 16 x 2+I2C
LCD 16 x 2+I2C seperti pada Gambar 2.8 karena ukuran tersebut dirasa sudah cukup untuk menampilkan variabel ASCII yang dikirimkan oleh microcontroller. Adapun LCD 16x2 yang dipilih tersebut sudah ditambahkan dengan komponen I2C, penambahan komponen I2C ini bertujuan untuk menghemat penggunaan pin LCD pada microcontroller.
Gambar 2. 5 LCD 16 x 2+I2C [11]
LCD 16x2 ini memiliki 16 pin untuk dapat terhubung ke Arduino Mega 2560, oleh karena terlalu banyak pin, pin tersebut harus disambungkan terlebih dahulu ke I2C (Integrated Circuit) agar terjadi penghematan pin ketika masuk ke Arduino Mega 2560. Setelah terhubung pin LCD yang terhubung ke I2C menjadi tinggal 4 pin [11].
5. Thermocouple 1M 2M Wire Thermo Sensor
Termokopel (Thermocouple) adalah jenis sensor suhu yang digunakan untuk mendeteksi atau mengukur suhu melalui dua jenis logam konduktor berbeda yang digabung pada ujungnya sehingga menimbulkan efek “Thermo-electric”. Efek Thermo-electric pada Termokopel ini ditemukan oleh seorang fisikawan Estonia bernama Thomas Johann Seebeck pada Tahun 1821, dimana sebuah logam konduktor yang diberi perbedaan panas secara gradient akan menghasilkan tegangan listrik. Perbedaan Tegangan listrik diantara dua persimpangan (junction) ini dinamakan dengan Efek “Seeback”.
Gambar 2. 6 Thermocouple-1M-2M-Wire-Thermo-Sensor-0-400-Degree-High-Temperature-
Termokopel ini digunakan pada alat sebagai pendeteksi suhu band heater saat terjadi proses kompresi pada alat.
8. Sensor Ultrasonik HC-SR04
ensor jenis ini adalah modul elektronik yang mendeteksi sebuah objek menggunakan gelombang ultrasonik. ultrasonic terdiri dari sebuah transmitter (Pemancar) dan sebuah receiver (penerima). Transmitter berfungsi untuk memancarkan sebuah gelombang suara kearah depan. Jika ada sebuah objek didepan transmitter maka sinyal tersebut akan memantul kembali ke Receiver. Fungsi sensor ultrasonic adalah mendeteksi benda atau objek di hadapan sensor.
Gambar 2. 7 Sensor Ultrasonik HC-SR04
HC-SR04 memiliki 2 komponen utama sebagai penyusunnya yaitu ultrasonic transmitter dan ultrasonic receiver. Fungsi dari ultrasonic transmitter adalah memancarkan gelombang ultrasonik dengan frekuensi 40 KHz kemudian ultrasonic
receiver menangkap hasil pantulan gelombang ultrasonik
yang mengenai suatu objek. Waktu tempuh gelombang ultrasonik dari pemancar hingga sampai ke
penerima sebanding dengan 2 kali jarak antara sensor dan bidang pantul.
9. Sensor Proximity induktif
Sensor induktif adalah sensor jarak elektronik yang mendeteksi benda logam tanpa menyentuhnya. Ketika jarak
pendeteksian adalah 5mm atau kurang dari 1 inci dan aplikasi membutuhkan penginderaan logam, inductive proximity (IP) memberikan solusi yang dibutuhkan.
Gambar 2. 8 Sensor Proximity induktif
Sensor Proximity Induktif beroperasi di bawah prinsip listrik yaitu induktansi. Induktansi adalah fenomena di mana arus yang berfluktuasi, yang menurut definisi memiliki komponen magnetik, menginduksi gaya gerak listrik (ggl) dalam objek target. Sensor proximity induktif memiliki empat komponen utama yaitu coil, oscillator, trigger circuit, dan an output. 10. Sensor Proximity capasitif
Capacitive Proximity Sensor dapat digunakan untuk mendeteksi target logam dan juga non logam seperti kertas, kayu, plastik, kaca, kayu, bubuk, dan cairan.etc tanpa kontak fisik. Capacitive Proximity Sensor merasakan objek “target” karena kemampuan target untuk diisi listrik. Karena bahkan non-konduktor dapat menahan muatan, ini berarti hampir semua objek dapat dideteksi dengan sensor jenis ini.
Gambar 2. 9 Sensor Proximity capasitif
Sensor proximity kapasitif bekerja berdasarkan prinsip kapasitor. Sensor proximity kapasitif mendeteksi perubahan kapasitansi antara objek penginderaan dan Sensor. Jumlah kapasitansi bervariasi tergantung pada ukuran dan jarak objek penginderaan. Komponen utama dari sensor proximity
kapasitif adalah plate, oscillator, threshold detector dan output circuit.
11. Motor Servo MG90s
Motor servo adalah sebuah motor DC yang dilengkapi rangkaian kendali dengan sistem closed feedback yang terintegrasi dalam motor tersebut. Pada motor servo posisi putaran sumbu (axis) dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo.
Gambar 2. 10 Motor Servo MG90s
Motorservo ini digunakan pada alat sebagai media penggerak buka tutup pintu secara otomatis. Motor servo disusun dari sebuah motor DC, gearbox, variabel resistor (VR) atau potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas maksimum putaran sumbu (axis) motor servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang pada pin kontrol motor servo.
12. Modul DC-DC Step Up XL6009
DC-DC XL6009 Boost Power Modul adalah modul Penaik tegangan (step up/boost) DC-DC ekonomis yang bisa distel tegangan output nya.
Gambar 2.11 Modul DC-DC Step Up XL6009 Modul ini berfungsi menaikkan tegangan dari tegangan inputan, tegangan inputan berkisar di 3.5Vsampai 18 V
dengan arus inputan maximalnya 4A dan keluaran dari modul ini dapat diatur hingga tegangan 24 V.
13. Modul DC-DC Step Down LM2596
Modul DC-DC Step Down LM2596 ini merupakan kebalikan dari modul DC-DC Step Up XL6009. Bedanya
modul ini berfungsi sebagai penurun tegangan input ke tegangan output.
Untuk mengatur tegangan dari modul ini dapat diatur dengan memutar potensio yang ada pada modul ini.
Gambar 2. 12 Modul DC-DC Step Down LM2596 14. Modul ESP8266
ESP8266 adalah modul wifi yang terbaru yang dapat di masuki program tampa memerlukan mikrokontroler tambahan pada modulnya. Kelebihan lainnya, ESP8266 ini dapat menjalankan peran sebagai adhoc akses poin maupun klien sekaligus.
Gambar 2. 13 Modul ESP8266 15. Linear Actuator Electric Piston Electric
Piston elektrik ini dapat bekerja pada tegangan inputan 12 V DC. Dengan kekuatan tekanan 120 kg. alat ini digunakan sebagai kompresi pada umumnya.
III. METODE PENELITIAN
Berikut adalah Metode penelitian yang digunakan dalam perancangan dan pembuatan tempat sampah otomatis
Gambar 3. 1 Metode Penelitian Yang Digunakan
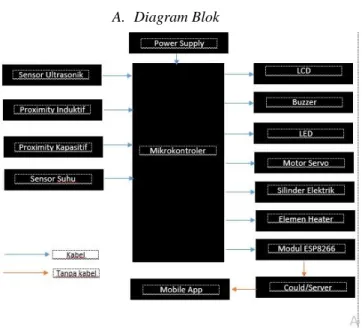
IV. PERANCANGAN SISTEM A. Diagram Blok
Gambar 4. 1 Diagram Blok Sistem
B. Flowchart Alat
Gambar 4. 2 Flowchart Alat Bagian Satu
Gambar 4. 4 Flowchart Alat Bagian Ketiga
C. Desain Perancangan Fisik
Deskripsi fisik produk yang akan dibuat akan memberikan gambaran secara fisik terhadap bentuk produk secara keseluruhan. Dalam hal ini yang akan dideskripsikan secara fisik adalah bagian hardware dengan pemodelan kasar berbentuk tiga dimensi. Berikut gambar tiga dimensi dari alat yang dirancang.
Gambar 4. 5 Sketsa 3D Alat tampak depan
Gambar 4. 6 Desain alat tampak belakang
Gambar 4. 4 desain alat tampak depan terbuka
V. HASIL IMPLEMENTASI DAN HASIL PENGUJIAN A. Packaging
implementasi alat berupa tempat sampah berbentuk kubus persegi panjang. Dengan dimensi (33 x 33 x 88) Cm. dimana pada bagian belakang tempat sampah ini terdapat box system yang mengatur cara kerja dari alat tersebut. Dalam box project tersebut terdapat berbagai komponent elektronika yang telah disebutkan satu persatu pada bagian teori dasar.
Gambar 5. 1 Packaging alat Lectro-Bin
Gambar diatas merupakan implementasi alat yang telah di desain terlebih dahulu. Implementasi alat dibuat dengan mengikuti ketentuan ketentuan yang telah di tetapkan pada desain Lectro-Bin.
Gambar 5. 2 packaging box Lectro-Bin
Isi dari box project Lectro-Bin merupakan semua hardware yang telah dijelaskan pada teori dasarpada laporan ini. Semua komponen terkoneksi di dalam box project ini sehingga alat dapat melakukan kerjanya sesuai yang telah di rancang. System dalam box project memiliki dua sumber inputan yaitu tegangan DC untuk sistem elektronika dan sumber tegangan AC untuk suplay heater.
VI. HASIL DAN PEMBAHASAN
1. sensor proximity kapasitif
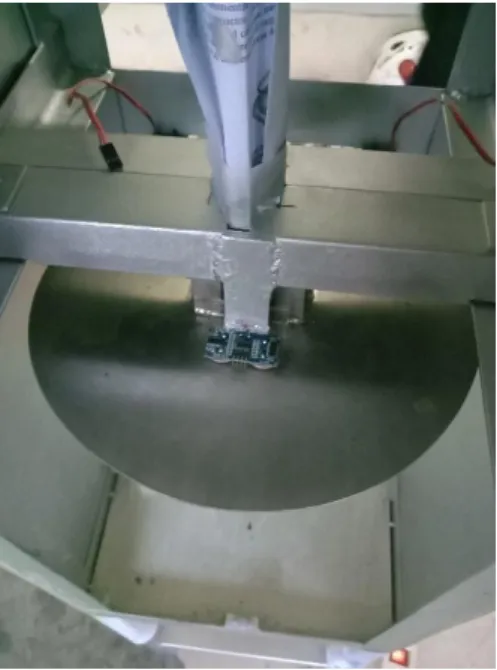
Pengujian untuk sensor proximity dilakukan secara tiga tahap yaitu, pengukuran jarak sensing, memilah jenis sampah, dan yang terkahir mengukur tegangan kerja dari kedua sensor proximity. Berikut ini adalah hasil pengukuran yang dilakukan pada sensor proximity.
Gambar 6. 1 implementasi sensor Proximity capasitif dan inductif
Berikut hasil pengujian yang telah dilakukan dari senso rproximity
Tabel 6.1Pengujian jarak sensing pada sensor proximity kapasitif No Jarak ukur (cm) status Tegangan Output(v) 1 0,1 terdeteksi 0 2 0,2 terdeteksi 0 3 0,3 terdeteksi 0 4 0,4 terdeteksi 0 5 0,5 terdeteksi 0 6 0,6 terdeteksi 0 7 0,7 terdeteksi 0 8 0,8 terdeteksi 0 9 0,9 terdeteksi 0 10 1 terdeteksi 0 11 1,1 terdeteksi 0 12 1,2 Tidak terdeteksi 12 13 1,3 Tidak terdeteksi 12 14 1,4 Tidak terdeteksi 12 15 1,5 Tidak terdeteksi 12
Tabel 6.2 Pengujian jarak sensing dan tegangan output pada sensor proximity induktif
No Jenis Sampah proximity
induktif proximity kapasitif 1 Plastik jinjing bening tidak terdeteksi terdeteksi 2 Plastik jinjing berwarna tidak terdeteksi terdeteksi 3 Botol air mineral tidak terdeteksi terdeteksi 4 Botol minuman soda tidak terdeteksi terdeteksi 5 Plastik kemasan sabun tidak terdeteksi terdeteksi
6 Plastik makanan ringan tidak terdeteksi terdeteksi 7 Kaleng
minuman soda terdeteksi terdeteksi
8 styrofoam tidak
terdeteksi
tidak terdeteksi
9 Bohlam kaca tidak terdeteksi terdeteksi 10 Gelas plastik minuman tidak terdeteksi terdeteksi
11 Aluminium terdeteksi terdeteksi
12 Botol Sauce tidak terdeteksi
terdeteksi
13 Kaleng pylox terdeteksi terdeteksi
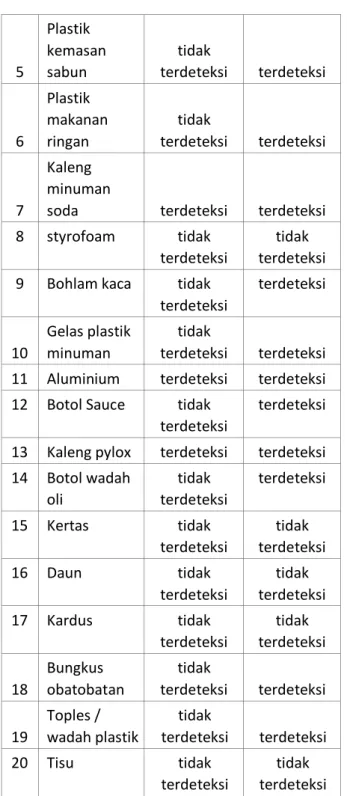
14 Botol wadah oli tidak terdeteksi terdeteksi 15 Kertas tidak terdeteksi tidak terdeteksi 16 Daun tidak terdeteksi tidak terdeteksi 17 Kardus tidak terdeteksi tidak terdeteksi 18 Bungkus obatobatan tidak terdeteksi terdeteksi 19 Toples / wadah plastik tidak terdeteksi terdeteksi 20 Tisu tidak terdeteksi tidak terdeteksi Tabel 6.3 Pengujian jarak sensing bahan pada sensor
proximity induktif dan kapasit
No Jenis Sampah proximity induktif proximity kapasitif 1 Plastik jinjing bening tidak terdeteksi terdeteksi 2 Plastik jinjing berwarna tidak terdeteksi terdeteksi 3 Botol air mineral tidak terdeteksi terdeteksi 4 Botol minuman soda tidak terdeteksi terdeteksi 5 Plastik kemasan sabun tidak terdeteksi terdeteksi 6 Plastik makanan ringan tidak terdeteksi terdeteksi 7 Kaleng minuman
soda terdeteksi terdeteksi
8 styrofoam tidak
terdeteksi
tidak terdeteksi
9 Bohlam kaca tidak terdeteksi terdeteksi 10 Gelas plastik minuman tidak terdeteksi terdeteksi
11 Aluminium terdeteksi terdeteksi
12 Botol Sauce tidak terdeteksi
terdeteksi
13 Kaleng pylox terdeteksi terdeteksi
14 Botol wadah oli tidak terdeteksi terdeteksi 15 Kertas tidak terdeteksi tidak terdeteksi 16 Daun tidak terdeteksi tidak terdeteksi 17 Kardus tidak terdeteksi tidak terdeteksi 18 Bungkus obatobatan tidak terdeteksi terdeteksi 19 Toples / wadah plastik tidak terdeteksi terdeteksi 20 Tisu tidak terdeteksi tidak terdeteksi 2. sensor ultrasonic HCSR-04
Pengujian untuk pembacaaan nilai sensor ultrasonik HCSR-04 dilakukan sebanyak dua kali, dikarenakan pada perangkat lectrobin menggunakan dua buah sensor ultrasonik untuk keperluan pengukuran kapasitas dan jarak plat kompresi. Pengambilan data dilakukan dengan metode mengisi wadah kapasitas dengan berbagai variasi sampah lalu membandingkan pembacaan sensor dengan pengukuran manual menggunakan mistar/penggaris, hal yang sama juga berlaku untuk pengukuran plat kompresi yaitu dengan menurunkan plat secara bertahap dan membandingkan nilai pengukurannya. Berikut ini adalah hasil pengukuran yang dilakukan pada sensor ultrasonik.
Gambar 6. 2 implementasi sensor HCSR-04 Tabel 6.4 Hasil Pengujian Sensor Ultrasonik kapasitas
Tinggi sebenarnya(cm) Tinggi Pembacaan Sensor (Cm) Selisih Nilai Error (%) 4 3,85 0,15 3,75 8,3 7,76 0,54 6,506024 7,5 7,92 0,42 5,6 16,3 16,56 0,26 1,595092 15 15,23 0,23 1,533333 10 9,72 0,28 2,8 12,5 12,32 0,18 1,44 2 2,12 0,12 6 20 20,42 0,42 2,1 5 4,78 0,22 4,4 13 12,67 0,33 2,538462 14,5 14,83 0,33 2,275862 18 17,76 0,24 1,333333 3 2,86 0,14 4,666667 9 8,84 0,16 1,777778 Rata-Rata error 3,22
Tabel 6.5 Hasil Pengujian Sensor Ultrasonik Plat Kompresi
Tinggi sebenarnya(cm ) Tinggi Pembacaa n Sensor (Cm) Selisi h Nilai Error (%) 3 2,85 0,15 5,26315 8 5 4,78 0,22 4,60251 7 6,85 0,15 2,18978 1 9 9,32 0,32 3,43347 6 11 10,88 0,12 1,10294 1 13 13,33 0,33 2,47561 9 15 14,74 0,26 1,76390 8 17 17,65 0,65 3,68272 19 18,65 0,35 1,87667 6 21 20,74 0,26 1,25361 6 23 23,47 0,47 2,00255 6 25 24,56 0,44 1,79153 1 27 26,52 0,48 1,80995 5 Rata-rata error 2,55
Pengambilan data dibatasi sebesar 20 cm pada kapasitas dikarenakan nilai tersebut merupakan nilai ketinggian maksimun dari wadah, sedangkan nilai 27cm pada plat kompresi merupakan nilai maksimum sebelum plat menekan lebih dalam kedasar wadah. Dari rata-rata nilai error yang didapatkan dapat disimpulkan bahwa penggunan sensor ultrasonik sudah cukup untuk memenuhi standar kebutuhan sistem, mengingat nialai erro yang didapatkan < 5%. Meskipun nilai error yang didapatkan cukup untuk memenuhi standar tetapi niali error tersebut tidak dapat menjadi acuan utama ketika heater mulai dinyalakan, hal ini berkaitan dengan suhu kerja dari sensor itu sendiri yang terbattas pada 70⁰C. Pada saat pengujian dengan menyalakan heater didapatkan
nilai error akan membesar, hal ini dikarenakan suhu juga mempengaruhi penyimpangan gelombang yang dipancarkan oleh sensor, selain itu kesalahan pengukuran juga terjadi karena pembulatan nilai waktu tempuh gelombang ultrasonik pada proses perhitungan untuk diproses pada perangkat lunaknya.
3. Sensor Suhu Thermocouple
Pengujian pada sensor thermocouple dilakukan dengan memanaskan heater dengan tegangan input variatif dengan tujuan untuk mendapatkan suhu yang berbeda-beda, selanjutnya suhu hasil pembacaan thermocouple pada heater akan dibandingkan dengan pengukuran menggunakan kamera thermal. Selain itu kami juga mengukur nilai tegangan output yang dihasilkan oleh sensor thermocouple ketika bekerja mengukur suhu. Berikut ini adalah hasil pengukuran yang dilakukan pada sensor thermocouple.
Tabel 6.6 Hasil Pengujian Sensor termokopel
Suhu Heater (⁰C) Suhu Thermocouple (⁰C) Selesih Error (%) 52,25 50,5 1,75 3,465347 64,6 63 1,6 2,539683 72,1 73,25 1,15 1,569966 81,8 81,75 0,05 0,061162 89,7 90 0,3 0,333333 97,9 97,75 0,15 0,153453 108,2 107,25 0,95 0,885781 124,6 118 6,6 5,59322 130,3 129,5 0,8 0,617761 141,2 138,75 2,45 1,765766 152,4 148,5 3,9 2,626263 Rata-rata 1,77 4. Pengujian LED
LED pada hardware lectrobin akan menyala ketika mememnuhi kondisi tertentu, lectrobin menggunakan tiga buah led berwarna merah, biru, dan putih. LED merah akan menyala dalam kondisi standby, LED biru akan menyala ketika kapasitas dari lectrobin telah penuh, sedangkan LED putih akan menyala ketika sedang memasuki proses kompresi.
Berikut adalah data pengujian tegangan kerja dari LED yang terpasang.
Gambar 6. 3 implementasi LED
Tabel 6.7 Hasil Pengujian LED
Dari pengujian led pada tabel didapatkan bahwasannya saat led menyala maka pin digital mikrokontroler aarduino mega akan mngirimkan sinyal HIGH dengan tegangan berkisar 4,6 V sedangkan ketika lampu padam mikrokontroler akan mengirimkan sinyal LOW dengan tegangan hampir mendekati 0V.
Tegangan pada LED merah saat kondisi menyala
Tegangan pada LED merah saat kondisi padam
Tegangan pada LED biru saat kondisi menyala
Tegangan pada LED biru saat kondisi padam
Tegangan pada LED putih
saat kondisi menyala
Tegangan pada LED puith
5. Pengujian LCD
Tampilan LCD pada hardware lectrobin digunakan sebagai notifikasi sekaligus tampilan dari kondisi status dari sistem yang bekerja. Berikut ini adalah tampilan dari LCD ketika hardware lectrobin menjalankan satu siklus operasi kerja.
Gambar 6. 4 implementasi LCD Berikut hasil pengujian dari LCD
Gambar 6.5 Tampilan LCD saat hardware dinyalakan
Gambar 6.6 Tampilan LCD saat hardware dalam kondisi
standby
Gambar 6.7 Tampilan LCD saat hardware dalam kondisi kerja kompresi
Gambar 6.8 Tampilan LCD saat hardware menerima sampah plastik
Gambar 6.9 Tampilan LCD saat hardware menerima sampah non plastik
6. buzzer pasif
Buzzer pasif pada hardware lectrobin akan berbunyi ketika status wadah penampungan sampah telah terisi penuh. Untuk memverikasi kondisi itu, maka akan digunakan multimeter untuk mengukur tegangan kerja dari buzzer tersebut dan perangkat osiloskop untuk memverikasi sinyal frekuensi yang dihasilkan. Berikut ini adalah data hasil pengujian dari buzzer.
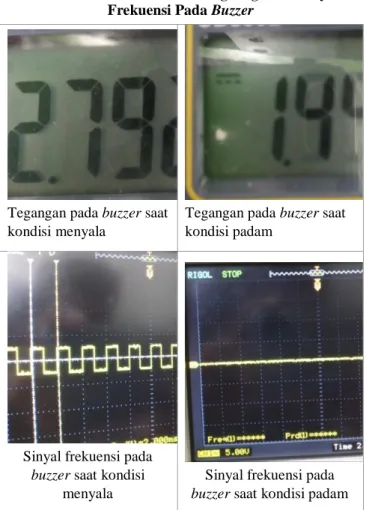
Tabel 6.7 Hasil Pembacaan Teganagn dan Sinyal Frekuensi Pada Buzzer
Pada tabel 6.7 hasil pengujian dari buzzer menujukan ketika buzzer berbunyi akibat kapasistas telah penuh, tegangan kerja yang dihasilkan adalah 2,792 V dengan frekuensi yang terukur pada osiloskop adalah 500Hz, sedangkan ketika buzzer padam tegangan yang tercata pada multimeter adalah 1,448 V dan frekuensi yang tampil pada layar osiloskop adalah sebesar 0Hz.
7. Pengujian motor silinder
Motor silinder digunakan sebagai penggerak plat kompresi yang bertujuan untuk menekan sampah pada hardware lectrobin. Motor silinder yan digunakan berjenis motor DC yang dihubungkan suppply 12V dengan panjang lengan stroke sebesar 350mm. Pengujian dilakukan untuk mengetahui besarnya arus dan tegangan ketika silinder bergerak naik dan turun. Berikut ini adalah data hasil pengujian motor silinder.
Gambar 6. 5 implementasi piston elektrik
Tabel 6.8 Hasil Pembacaan Tegangan piston elektrik
Pada tabel di atas dapat dilihat hasil tegangan motor silinder yang terukur pada output konektor modul L298N motor driver ketika user menekan tombol silinder turun, motor akan bergerak turun dengan nilai tegangan kerja yang terukur adalah 8,12 volt dengan arus starting awal 1,5 A namun ketika motor telah berjalan arus tersebut turun secara perlahan hingga sampai pada 0,5 A. Hal ini dikarenakan motor silinder membutuhkan torsi yang besar pada saat starting untuk menggerakan rangkaian gear box yang ada didalamnya, namun secara perlahan torsi tersebut seriring berkurang akibat pergerakan gear box yang mulai stabil dan beban plat kompresi bergerak kearah bawah untuk mengkompresi bahan plastik, sehingga torsi yang dibutuhkan tidak begitu besar. Selanjutnya saat user meneka tombol silinder naik, silinder akan bergerak naik ke atas dengan tegangan terukur sebesar 8,63 Volt dengan arus konstan 1,5 A. Pada kondisi ini arus yang dibutuhkan jauh lebih besar dan bersifat konstan dikarenakan motor silinder berusaha menarik plat kompresi kembali ke posisi semula. Berikutnya terjadi voltage drop pada dengan besar tegangan kurang lebih 4 volt akibat penggunan modul driver L298N, mengingat IC L298 tersusun dari rangkaian BJT sebagai bridge dan arus yang mengalir cukup besar yaitu 1,5 A. Nilai batas voltage drop yang disebutkan dalam datashhet berkisar antara 3,2 V untuk arus 1A dan 4,9 V dengan arus maksimum 2 A [2]. Meskipun
Tegangan pada buzzer saat kondisi menyala
Tegangan pada buzzer saat
kondisi padam
Sinyal frekuensi pada
buzzer saat kondisi menyala
Sinyal frekuensi pada
buzzer saat kondisi padam
Tegangan pada motor silinder saat bergerak turun
Arus pada motor silinder saat bergerak
turun
Tegangan pada motor silinder saat bergerak naik
Arus pada motor silinder saat bergerak
terjadi penurunan tegangan namun kondisi kerja motor silinder masih berjalan cukup baik, hanya saja terjadi penurunan kecepatan motor akibat adanya voltage drop tersebut.
8. Pengujian exhaust fan
Penggunaan exhaust fan ditunjukan untuk memberikan aliran sirkulasi udara yang baik ketika heater mulai melakukan pemanasan. Pengujian exhaust fan dilakukan dengan cara melihat tegangan dan arus yang dihasilkan ketika sistem heater mulai menyala dan suhu melebihi 40⁰C. Berikut adalah data pembacaan tegangan dan arus yang dihasilkan.
Gambar6.6 implementasi exhaust fan
Tabel 6.9 Hasil Pembacaan Tegangan dan Arus pada
Exhaust Fan
Tegangan (V) Arus (A) Daya(Watt)
220 0,0909 20
Bedasarkan tabel diatas nilai daya yang yang terpakai pada exhaust fan saat beroperasi relatif cukup kecil sekiatar 20 watt saja, Selain itu kerja dari exhaust fan sudah sesuai dengan perancangan yang diinginkan, yaitu akan menyala otomatis ketika suhu heater sudah berada diatas 40⁰C dan akan kembali nonaktif ketika berada dibawahnya.
9. motor servo dan lockdoor servo
Pada hardware lectrobin terdapat tiga buah servo yang digunakan sebagai penggerak pintu masuk sampah, dan sebagai pengunci dari pintu wadah penampungan. Motor
servo yang digunakan memiliki frekuensi kerja 50Hz dengan tegangan kerja berkisar 4,5 – 5 volt. Pengujian motor servo dilakukan untuk menegetahui lebar pulsa yang dihasilkan, persentase siklus kerja, dan yang terakhir adalah nilai tegangan output pada masing-masing motor servo Berikut ini adalah data hasil pengujian ketiga motor servo.
Tabel 6.10 Hasil Pembacaan Sinyal PWM Pada Masing-masing Servo
Sinyal PWM pada motor
servo penutup kiri saat kondisi membuka (0⁰)
Sinyal PWM pada motor
servo penutup kiri saat kondisi menutup (90⁰)
Sinyal PWM pada motor servo penutup kanan saat kondisi membuka (180⁰)
Sinyal PWM pada motor servo penutup kanan saat kondisi menutup (90⁰)
Sinyal PWM pada motor servo lockdoor saat kondisi
membuka (0⁰)
Sinyal PWM pada motor
servo lockdoor saat kondisi membuka (120⁰) Hasil pengujian motor servo dapat dilihat pada tabel diatas, dengan menggunakan perangkat osiloskop untuk melihat bagaimana bentuk sinyal PWM yang dihasilkan. Motor servo yang terpasang pada hardware lectrobin merupakan motor Servo Standar 180° adalah motor servo yang mampu bergerak dua arah (CW dan CCW) dengan defleksi masingmasing sudut mencapai 90° sehingga total defleksi sudut dari kanan – tengah – kiri adalah 180°. Bedasarkan gambar sinyal pada
tabel pengujian akan dilakukan perhitungan terkait lebar pulsa , duty cycle (siklus kerja), dan tegangan output dari sinyal PWM menggunakan rumus – rumus berikut ini.
Lebar pulsa = t.on (waktu dimana sinyal bernilai HIGH) Duty cycle = t.on / (Time Periode) x 100% [3]
Vout = Duty cycle x Vin [3]
Tabel 6.11 Parameter Keberhasilan dan Hasil Pengujian
Sudut Servo (⁰) Lebar pulsa (ms) Duty cycle (%) Vout (v) 0⁰ 1 5% 0,25 90⁰ 1,5 75% 3,75 120⁰ 1,7 85% 4,25 180⁰ 2 100% 5
Dari data diatas didapatkan bahwasannya lebar pulsa minimum terjadi saat motor servo berada pada posisi 0⁰ dengan tegangan output yang dihasilkan adalah 0,25 volt, Sedangkan lebar pulsa maksimum terjadi saat motor servo berada posisi sudut 180⁰ dengan tegangan output yang dihasilkan sebesar 5 volt. Hasil pengujian tersebut sudah cukup sesuai dengan spesifikasi motor servo yang digunakan pada hardware.
10. Memeriksa elemen pemanas heater
Gambar 6. 7 pemeriksaan suhu heater Tabel 6.12 Parameter Keberhasilan dan Hasil Pengujian
Parameter Keterangan
Tujuan Pengujian
•
Untuk mengetahui variasi tegangan dan arus serta daya pada heater•
Untuk mengetahui variatif suhu pada heaterMetode Pengujian heater
-
Memastikan kabel instlasi heater telah terpasang degan benar-
Hubungkan voltage regulatordengan heater
-
Set variasi nilai tegangan dari range 120-220 dengan selisih 10 volt-
Tunggu kurang lebih 10 menit-
Arahkan kamera thermal denganheater lalu liat suhu yang telah tercapai
-
Catat nilai tegangan, arus dan daya yang mengalir kedalam heaterParameter Keberhasilan Pengujian
Respon suhu akan menglami peningkatan seiring bertamabahnya tegangan dan arus yang mengalir pada
heater Parameter
yang diuji
Nilai tegangan, arus, daya, dan suhu pada heater
Elemen pemanas yang digunakan pada hardware lectrobin adalah heater dengan variasi band heater dan strip heater kedua variasi ini di custom membentuk tabung untuk memudahkan pemakai dalam mengeluarkan sampah. Pengujian pada elemen pemanas ini melingkupi pengujian tegangan, arus, dan daya untuk melihat sejauh mana suhu maximum yang akan dicapai dan berapa lama waktu yang dibutuhkan untuk mencapai suhu tersebut. Berikut adalah data pengujian elemen pemanas yang dapat dilihat pada tabel dan gambar dibawah ini.
Tabel 6.13 Parameter Keberhasilan dan Hasil Pengujian
Tegangan (v) Arus (A) Daya (Watt) Suhu (⁰C) waktu respon (detik) 120 5.3 636 52,1 578 130 5,7 741 64,6 747 140 5,9 826 72,1 868 150 6,2 930 81,8 932 160 6,4 1024 89,7 1054 170 6,6 1122 97,9 1224 180 6,8 1224 108,2 1030 190 7 1330 124,6 1146 200 7,1 1420 130,3 1343
210 7,3 1533 141,2 1378
220 7,4 1628 152,4 1490
Hasil pengujian heater dapat dilihat pada tabel 6. 14 pengujian dilakukan untuk melihat nilai tegangan, arus dan respon waktu yang dibutuhkan heater untuk mencapai suhu tertingginya, Pada tabel diperlihatkan bahwa nilai tegangan minimum yang digunakan pada sistem adalah 120 V dan arus yang terukur 5,3 A dengan respon waktu pemanasan maksimal adalah 578 detik , Sedangkan nilai tegangan maksimum yang digunakan adalah 220 dan arus yang terukur 7,4 A dengan respon waktu pemansan maksimum pada suhu 152⁰C sebesar 1490 detik. Secara perhitungan total daya yang digunakan jika memakai tegangan maksimum adalah sekitar 1628 watt, sedangkan daya yang terserap jika menggunakan tegangan minimum adalah 636 watt. Bedasarkan perhitungan pemakaian daya dan desain spesifikasi yang telah dibuat pada dokumen sebelumnya, hardware lectrobin hanya akan memakai rentang suhu berkisar 80-100⁰C dengan begitu untuk menghemat pemakaian daya maka digunakanlah sebuah rangkaian dimmer untuk membatasi tegangan input dari heater nilai tegangan input yang akan di set adalah 160 V dengan estimasi waktu kerja heater sebesar 15-20 menit. Selanjutnya sebagai bentuk pertimbanagan keamanan, dilakukan juga pengukuran suhu bada bagian luar body hardware lectrobin. Dengan rentang waktu kerja pemanasan sebesar 15 sampai 20 menit, kondisi body bagian samping masih cukup aman dari suhu panas, sedangkan body bagian belakang nilai suhu yang terukur adalah 54⁰C, namun jika dirasakan dengan sentuhan, body bagian belakang hanya terasa sedikit hangat. Hal ini mungkin didasari karena kamera thermal menangkap suhu udara panas yang dikeluarkan oleh exhaust fan.
VII . KESIMPULAN
Sejauh ini pengujian yang dilakukan untuk keseluruhan subsistem dapat berfungsi dengan baik sesuai spesifikasi yang telah direncanakan. Hardware dengan software dapat terintegrasi dengan baik. Subsistem akuisisi data dapat mengakuisisi data dengan toleransi error yang tidak jauh dari spesifikasi, meskipun terdapat kekurangan pada sensor ultrasonik ketika mengalami penyimpangan membaca dalam kondisi suhu tinggi tetapi hal itu dapat diakali dengan menonaktifkannya sementara ketika proses pemanasan. Selanjutnya subsistem Output Hardware berjalan dengan baik sesuai dengan perancangan untuk masing-masing komponennya baik itu LCD, LED, dan Buzzer sebagai notifikasi pada saat lectrobin bekerja. Pada sub sistem Penggerak dan Heater masing masing aktuator yaitu servo, motor silinder, dan exhaust fan bekerja dengan baik tanpa adanya gangguan meskipun terdapat efek suhu panas hasil dari pemanasan heater. Terakhir, subsistem antarmuka
pengguna berhasil menampilkan informasi-informasi dan notifikasi yang dibutuhkan oleh pengguna melalui aplikasi mobile/ web dari platform cayenne.
REFERENCES 1. https://www.99.co/blog/indonesia/daur-ulang-sampah-plastik/ 2. https://teknikelektronika.com/pengertian-proximity-sensor-sensor-jarak-jenis-jenis-sensor-proximity/ 3. https://www.researchgate.net/publication/33198619 1_Eksplorasi_Sampah_Plastik_Menggunakan_Met ode_'Heating'_Untuk_Produk_Pakai 4. https://media.neliti.com/media/publications/177004 -ID-analisa-peleburan-limbah-plastik-jenis-p.pdf 5. https://jurnal.ar-raniry.ac.id/index.php/elkawnie/article/download/52 2/438 6. https://www.andalanelektro.id/2018/09/cara-kerja-dan-karakteristik-sensor-ultrasonic-hcsr04.html 7. https://components101.com/buzzer-pinout-working-datasheet 8. https://www.warriornux.com/pengertian-modul-wifi-esp8266/