RANCANG BANGUN TEMPAT SAMPAH PINTAR MENGGUNAKAN SENSOR JARAK BERBASIS
MIKROKONTROLER ATMEGA 328
SKRIPSI
GANDA RAYA 160821030
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN
2018
RANCANG BANGUN TEMPAT SAMPAH PINTAR MENGGUNAKAN SENSOR JARAK BERBASIS
MIKROKONTROLER ATMEGA 328
SKRIPSI
Diajukan untuk melengkapi tugas dan memenuhi syarat mencapai gelar Sarjana Sains
GANDA RAYA 160821030
DEPARTEMEN FISIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM UNIVERSITAS SUMATERA UTARA
MEDAN
2018
PENGESAHAN SKRIPSI
Judul : RANCANG BANGUN TEMPAT SAMPAH
PINTAR MENGGUNAKAN SENSOR JARAK BERBASIS MIKROKONTROLER ATMEGA 328
Kategori : Skripsi
Nama : Ganda Raya
Nomor Induk Mahasiswa : 160821030
Program Studi : Sarjana (S1) Fisika
Departemen : Fisika
Fakultas : MIPA- Universitas Sumatera Utara
Disetujui di
Medan, Agustus 2018
P
ERNYATAANRANCANG BANGUN TEMPAT SAMPAH PINTAR MENGGUNAKAN SENSOR ULTRASONIK BERBASIS MIKROKONTROLER ATMEGA 328
SKRIPSI
Saya mengakui bahwa skripsi ini adalah karya sendiri, kecuali beberapa kutipan dan ringkasan yang masing-masing disebutkan sumbernya.
Medan, Agustus 2018
Ganda Raya 160821030
PENGHARGAAN
Alhamdulillahirabbil’alamiin,
Segala puji dan syukur yang penulis senantiasa panjatkan kepada Allah SWT yang telah melimpahkan berkah, rahmat karuniaNya dan menganugerahkan petunjuk untuk memudahkan dan melancarkan sehingga penulis dapat menyelesaikan skripsi dengan judul “Rancang Bangun Tempat Sampah Pintar Menggunakan Sensor Jarak Berbasis Mikrokontroller Atmega 328”. Tak lupa juga sholawat dan salam semoga senantiasa tercurahkan kepada Rasulullah SAW sang pembawa petunjuk dan selalu menjadi inspirasi dan teladan bagi penulis.
Demi kelancaran dalam penyelesaian laporan skripsi ini tidak terlepas dari bantuan berbagai pihak terutama kepada orang tua yaitu H. Abdul Yaman Munthe dan Hj. Mahyanun Tamba S.pd yang telah memberikan bantuan moril maupun materil, semangat dan do’a yang begitu besar kepada penulis.
Penulis menyadari bahwa tersusunnya skripsi ini do’a, perhatian, bimbingan, motivasi dan dukungan berbagai pihak, sehingga dengan keikhlasan dan kerendahan hati pada kesempatan ini penulis mengucapkan terima kasih yang sebesar-besarnya kepada :
1. Bapak Drs. Kurnia Brahmana, M.Si dan sebagai dosen pembimbing yang telah bekontribusi membantu penulis dalam memberikan ide, saran, kritik dan bimbingannya kepada penulis selama penulis mengerjakan skripsi ini.
2. Bapak Drs. Takdir Tamba, M.Eng.Sc dan Bapak Awan Maghfirah, M.Si sebagai dosen penguji yang telah memberikan kritik dan saran dalam pengerjaan skripsi ini.
3. Bang Johaiddin Saragih, M.Si, sebagai staf pegawai Departemen Fisika Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara yang telah memberikan saran dan masukan serta dukungan kepada penulis dalam menyelesaikan skripsi ini.
4. Kepada seluruh tenaga pengajar dan pegawai program studi S1 Ekstensi Fisika Instrumentasi Fakultas Matematika dan Ilmu Pengetahuan Alam Universitas Sumatera Utara
5. Keluarga besar MMA, uwak Murlan Tamba, tulang manaf tamba, ibu Hambiah tamba, ibu Maryam tamba, ibu Sarimah tamba, ibu Itym tamba, Tulang Ali Tamba, Ibu Bariah Tamba, dan Ibu Riah Tamba yang selalu memberikan bantuan dan dukungan semangat kepada penulis.
6. Cecans ku, Resa Sevtria, Khairun Nisa, Septi Roshandayani, terimakasih buat semangat, doa, dukungan, saran dan masukan serta bantuan yang selama ini tanpa lelah diberikan kepada penulis.
7. Kepada Abang, kakak dan Adik kandung penulis, Nurhayati Munthe, Ali Imran Munthe, Siti Fatimah Munthe, Halimah Tussakdiah Munthe, Zularnaen Munthe, Muhammad Ridho Munthe, Siti Rahmi Munthe, Siti Samiah Munthe, Siti Komariah Munthe, Ramadansyah Munthe, Maya Sari Munthe dan Dai Kumandang Sihar Munthe terimakasih buat dukungannya dan semangatnya serta doa yang senantiasa tercurahkan buat penulis
8. Sahabat ku, Rahmi Suliani, Ivani Hidayat, Hanny Sabrina, Raudatul Hasanah dan Irmayani Siregar terimakasih buat dukungannya dan semangatnya serta doa yang senantiasa tercurahkan buat penulis
9. Geng Bonzad, Dewi Aggraini, Rahmi Suliani, Mimi Aristy, Raisa Harahap, Endang Ayu Lestari, Efrilla Azizah dan Devi Faramita yang memberikan semangat dan dukungannya.
10. Teman – Teman seperjuangan Yosafat, Diah, Ridho, Desi, Deri, Fadhlan, Eko, Selly dan Sallye yang sudah saling bantu membantu dalam penyelesaian skripsi ini.
11. Teman – Teman mahasiswa Ekstensi Fisika dan Instrumentasi 2016 yang telah memberikan motivasi dan arahan kepada penulis.
12. Dan semua pihak yang telah membantu penulis namun tidak dapat disebutkan satu persatu.
Penulis menyadari sepenuhnya bahwa dalam pembuatan skripsi ini masih jauh dari kesempurnaan, untuk itu kritik dan saran yang bersifat membangun sangat penulis harapkan dari para pembaca. Semoga hasil skripsi ini menjadi Ibadah bagi penulis dan bermanfaat bagi pembaca.
AamiinYa Rabbal’alamin.
Medan, Agustus 2018 Hormat Saya
Penulis
RANCANG BANGUN TEMPAT SAMPAH MENGGUNAKAN SENSOR JARAK BERBASIS MIKROKONTROLER ATMEGA 328
ABSTRAK
Sampah merupakan masalah hampir disetiap kota, dampaknya terhadap pencemaran lingkungan dan penyebaran penyakit. Manajemen sampah dan pemahaman akan pentingnya pengolahan sampah pada masyarakat masih kurang. Banyak orang yang melupakan fungsi dari tempat sampah alasannya kebanyakan dari mereka merasa malas untuk membuka tutup tempat sampah karena tutup tempat sampah sangat kotor dan bau. Penelitian ini bertujuan bertujuan untuk merancang tempat sampah otomatis menggunakan mikrokontroler AT Mega 328, sensor HC-SR04, LED dan LCD.Sensor HC-SR04 digunakan untuk mendeteksi keberadaan manusia dan mendeteksi kapasitas tempat sampah menggunakan gelombang ultrasonic, Buzzer di gunakan untuk pemberitahuan suara jika tempat sampah telah penuh dan LCD untuk menampilkan data. Hasil yang diperoleh dari pengujian sistem adalah tempat sampah berhasil dalam membuka dan menutup secara otomatis serta mendeteksi kapasitas tempat sampah dan menampilkan ke LED sesuai dengan fungsi sistem.
Kata kunci: Mikrokontroler ATMega 328, tempat sampah, HC-SR04, LCD, Buzzer.
THE DESIGN OF AUTOMATIC TRASH BIN USING ULTRASONIC CENSOR BASED ON ATMEGA 328 MICROCONTROLLER
ABSTRACT
Garbage is a problem in almost every city , it has impact to the environmental pollution and the spread of the disease .The garbage management and the understanding about the importance of trash processing in the community is still poor. Many people forget about the function of the trash bin. The reason is because most of them are lazy to open the trash bin cap because its very dirty and stinky .This research aims to design an automatic trash bin with microcontroller At Mega328, LED , HC-SR04 censor and LCD. HC-SR04 censor is used to detect human existence and the space capacity of trash bin using ultrasonic wave, buzzer is used for sound notifications if the trash is full and LCD to display data. The result of testing system shows that the trash bin is succeed to automatically open and to close as well. It also can detect the capacity of the trash bin and be displayed by LED in accordance with the function of the system.
Keywords: mikrokontroller At Mega328, the trash, HC-SR04, LCD, Buzzer.
DAFTAR ISI
PENGESAHAN SKRIPSI i
PERNYATAAN ii
PENGHARGAAN iii
ABSTRAK vi
ABSTRACK vii
DAFTAR ISI viii
DAFTAR TABEL x
DAFTAR GAMBAR xi
BAB 1 PENDAHULUAN 1
1.1 Latar Belakang Masalah 1
1.2 Rumusan Masalah 2
1.3 Batasan Masalah 2
1.4.Tujuan Penelitian 3
1.5. Manfaat Penelitian 3
1.6. Sistematika Penulisan 3
BAB 2 TINJAUAN PUSTAKA 5
2.1. Sampah 5
2.2. Sensor Ultrasonik 8
2.3. LCD (Liquid Crystal Display) 7
2.3.1.Fungsi Pin-Pin LCD 8
2.4. Mikrokontroler ATMega 328 9
2.4.1.Fitur ATMega 328 11
2.5. Buzzer 12
2.6. IC 7805 Regulator Tegangan 13
2.7. Motor Servo 14
BAB 3 METODELOGI PENELITIAN 15
3.1.Perancangan Sistem 15
3.2.Blok Diagram 15
3.3.Penentuan Komponen Tempat Sampah 16 3.4.Perancangan Rangkaian Sensor HC-SR04 17
3.5.Rangkaian Buzzer 18
3.6.Perancangan Rangkaian Liquid Crystal Display (LCD) 19
3.7.Perancangan PCB (Printed Circuit Board) 20 3.8.Perancangan Rangkaian Power Supplay Adaptor (PSA) 22 3.9.Perancangan Rangkaian Mikrikontroler ATMega 328 23
3.10.Diagram Alir (Flowchat) 24
BAB 4 HASIL DAN PEMBAHASAN 25
4.1. Hasil Pengujian Rangkaian Mikrokontroler ATMega 328 25 4.2. Hasil Pengujian Rangkaian Interfacing LCD 26
4.3. Hasil Pengujian Sensor HC-SR04 27
4.4. Pengujian Rangkaian Servo 28
4.5. Pengujian system 29
BAB 5 KESIMPULAN DAN SARAN 31
5.1. Kesimpulan 31
5.2. Saran 31
DAFTAR PUSTAKA 32
LAMPIRAN
DAFTAR TABEL
Nomor Judul Halaman
Tabel
1. Konfigurasi Pin LCD 2 x 16 8
2. Peralatan 16
3. Komponen Fisik 17
4. Komponen Elektronik 17
5. Hasil Pengujian Sensor HC-SR04 Terhadap Objek 27
DAFTAR GAMBAR
Nomor Judul Halaman
Gambar
1. Sensor Ultrasonik 6
2. LCD 2 x 16 karakter 7
3. Pin Mikrokontroler Atmega328 10
4. Buzzer 12
5. IC LM 7805 13
6. Motor Servo 14
7. Diagram Blok Sistem 15
8. Rangkaian sensor Ultrasonik HC-SR04 18
9. Skema Rangkaian Buzzer 19
10. Sistem Kerja Rangkaian LCD 19
11. Tata Letak Jalur PCB 21
12. Tata Letak Komponen PCB 22
13. Rangkaian PSA (Power Supplay Adaptor) 23
14. Perancangan Rangkaian Mikrokontroler ATMega 328 23
15. Diagram Alir (flowchart) 24
16. Informasi Signature Mikrokontroler 25
17. TampilanTempat Sampah Terbuka 29
18. Tampilan Tempat Sampah Tertutup 30
19. Tampilan Tempat Sampah Penuh 30
DAFTAR LAMPIRAN
Nomor Judul Halaman
Lampiran
1. Program Keseluruhan 33
2. Rangkaian Keseluruhan 36
3. Foto Keseluruhan Alat 37
4. Datasheet Sensor HC SR04 39
5. Datasheet ATMega 328 55
6. Datasheet Buzzer 87
BAB 1 PENDAHULUAN
1.1 Latar Belakang Masalah
Membuang sampah pada tempatnya mungkin sesuatu yang mudah bagi setiap orang tetapi kenyataanya masih banyak ditemukan sampah yang berserakan di sembarang tempat. Hal itu dikarenakan rasa kurang kepedulian masyarakat terhadap pentingnya menjaga kebersihan dan kesehatan lingkungan sekitar. Sampah merupakan ancaman serius bagi masyarakat, karena membuang sampah sembarangan dapat menyebabkan pencemaran lingkungan. Hal ini terbukti dengan adanya UU nomor 18 Tahun 2008 tentang Pengelolaan Sampah. Bagi pelaku kejahatan sampah yang berdampak kerusakan lingkungan dan menyebabkan gangguan kesehatan bagi manusia akan diberi sanksi berupa kurungan selama tiga bulan atau denda maksimal sebesar Rp 50 juta.
Tempat sampah merupakan tempat untuk menampung sampah sementara, yang biasanya terbuat dari logam atau plastik. Selama ini banyak orang membuang sampah tidak pada tempatnya, karena hampir kebanyakan orang merasa malas ketika ingin membuang sampah pada tempatnya. Rasa malas muncul karena jika ingin membuang sampah pada tempat sampah harus terlebih dahulu membuka tutup tong sampah, itulah yang membuat malas karena tutup tong sampah sangat kotor dan bau.
Dalam meningkatkan kesadaran akan kepedulian terhadap kebersihan lingkungan, kadang memerlukan cara yang unik agar tiap-tiap individu tertarik, sehingga tak segan untuk membuang sampah pada tempatnya.
Salah satu teknologi yang populer adalah mikrokontroler yang seringdisematkan di perlatalan canggih sebagai penggendali kerja. Komponen elektronika yang didalamnya terkandung sistem interkoneksi antara Mikroprosesor, RAM, ROM, I/O interface, dan beberapa peripheral instruksi. Mikrokontroler adalah sebuah sistem komputer yang seluruh atau sebagian besar dikemas dalam satu chip IC, Sehingga Sering disebut singel chip microcomputer. Microkontroler merupakan system computer yang mempunyai satu atau berapa tugas yang sangat spesifik. Meskipun mikrokontroler tidak secerdas mikroprosesor, tapi jika tingkat kepandaian dimiliki telah cukup untuk menjalankan tugas dari suatu instrumen, maka mikrokontroler
menjadi pilihan pertama karena memiliki kelebihan dalam hal harga,kesederhanaan rangkaian, dan dimensi instumen yang lebih kecil. Mikrokontroler biasa diterapkan pada peralatan elektronik agar peralatan bekerja secara otomatis.
Hal ini yang mendasari penulis untuk mengembangkan alat yang digunakan sebagai pengendali kebersihan lingkungan berupa sebuah tempat sampah otomatis yang mempunyai tutup yang dapat terbuka sendiri ketika sampah akan dimasukkan dan akan tertutup dengan sendirinya sesudah sampah dimasukan serta mengucapkan
“terimakasih” dan dapat mendeteksi kapasitas tempat sampah. Jika kapasitas telah penuh tempat sampah tidak dapat bekerja secara otomatis untuk mengaktifkan kembali di sediakan tombol reset. Dengan adanya tempat sampah otomatis, diharapkan mengurangi bahaya infeksi kuman, bakteri dan virus yang berasal dari tempat sampah dan membuat orang merasah lebih praktis dan higienis ketika membuang sampah.
1.2 Rumusan Masalah
Berdasarkan latar belakang diatas, maka permasalahan dalam sekripsi ini dapat dirumuskan menjadi bagaimana merancang tempat sampah otomatis menggunakan mikrokontroler sehingga dapat membuka, menutup, mendeteksi kapasitas tempat sampah dalam keadaan penuh, hampir penuh dan kosong yang dapat bekerja secara otomatis.
1.3 Batasan Masalah
Untuk memfokuskan penelitian ini, maka disusun batasan masalah yang akan diteliti yakni sebagai berikut :
1. Tempat sampah dapat membuka dan menutup secara otomatis.
2. Tempat sampah akan mendeteksi kapasitas tempat sampah pada keadaan tidak penuh, hampir penuh dan penuh.
3. Sistem hanya memberikan notifikasi keadaan kapasitas tempat sampah kepada petugas yang berada pada lokasi yang telah ditentukan menggunakan LED.
4. Menggunakan sensor ultrasonic
5. Mikrokontroller yang digunakan berjenis ATMega 328 6. Tempat sampah digunakan dikantor tidak ditempat umum
1.4 Tujuan Penelitian
Penelitian ini bertujuan untuk :
1. Membuat rancangan tempat sampah otomatis menggunakan mikrokontroler sehingga dapat membuka, menutup tempat sampah secara otomatis.
2. Membuat rancangan tempat sampah yang dapat mendeteksi kapasitas tempat sampah yang dapat bekerja secara otomatis.
1.5 Manfaat Penelitian
Manfaat Penelitian ini adalah membantu pekerjaan manusia dalam membuang sampah dan mengetahui kapasitas tempat sampah pada kondisi penuh, hampir penuh dan kosong.
1.6 Skematik Penulisan
Dalam penulisan tugas akhir ini sistematika penulisan akan dibagi ke dalam beberapa bab antara lain:
BAB 1 PENDAHULUAN
Bab ini membahas tentang latar belakang masalah, rumusan masalah, batasan masalah, tujuan penelitian, manfaat penelitian dan sistematika penulisan.
BAB 2 TINJAUAN PUSTAKA
Berisi tentang penjelasan singkat mengenai defenisi komponen- komponen yang digunakan dalam pembuatan tempat sampah otomatis.
BAB 3 PERANCANGAN ALAT
Pada bab ini akan dibahas perancangan dari alat , yaitu diagram blok dari rangkaian, skematik dari masing-masing rangkaian dan diagram alir
BAB 4 HASIL DAN ANALISIS
Pada bab ini berisikan tentang pengujian alat dan juga analisa data diperoleh dari pengujian alat yang dibuat.
BAB 5 KESIMPULAN DAN SARAN
Bab ini merupakan penutup yang meliputi tentang kesimpulan dari pembahasan yang dilakukan dari penelitian ini serta saran yang berkaitan dengan seluruh proses perancangan dan pembuatan tugas akhir ini.
BAB 2 TINJAUAN PUSTAKA
2.1 Sampah
Sampah merupakan material sisa yang tidak diinginkan setelah berakhirnya suatu proses. Sampah merupakan konsep buatan manusia, dalam proses-proses alam tidak ada sampah, yang ada hanya produk-produk yang tak bergerak. Sampah dapat berada pada setiap fase materi: padat, cair, atau gas. Ketika dilepaskan dalam dua fase yang disebutkan terakhir, terutama gas, sampah dapat dikatakan sebagai emisi.
Emisi biasa dikaitkan dengan polusi. Dalam kehidupan manusia, sampah dalam jumlah besar dating dari aktivitas industri (dikenal juga dengan sebutan limbah), misalnya pertambangan, manufaktur, dan konsumsi. Hampir semua produk industri akan menjadi sampah pada suatu waktu, dengan jumlah sampah yang kira-kira mirip dengan jumlah konsumsi.
2.2 Sensor Ultrasonik
Sensor ultrasonik adalah sensor yang mempunyai frekuensi 40 khz dan banyak digunakan untuk aplikasi atau kontes robot cerdas. Sensor jarak ini menggunakan sonar (gelombang ultrasonik) untuk menentukan jarak dari benda yang berada di depannya.
Sensor ultrasonik terdiri dari dari dua unit, yaitu unit pemancar dan unit penerima. Strukturnya sangatlah sederhana, sebuah kristal piezoelectric dihubungkan dengan mekanik jangkar dan hanya dihubungkan dengan diafragma penggetar.Tegangan bolak-balik yang memiliki frekuensi kerja 40 KHz – 400 KHz diberikan pada plat logam. Sehingga Struktur atom dari kristal piezoelectric akan berkontraksi (mengikat), mengembang atau menyusut terhadap polaritas tegangan yang diberikan, dan ini disebut dengan efek piezoelectric. Kontraksi yang terjadi diteruskan ke diafragma penggetar sehingga terjadi gelombang ultrasonik yang dipancarkan ke udara (tempat sekitarnya), dan pantulan gelombang ultrasonik akan terjadi bila ada objek tertentu, dan pantulan gelombang ultrasonik akan diterima kembali oleh oleh unit sensor penerima. Selanjutnya unit sensor penerima akan menyebabkan diafragma penggetar akan bergetar dan efek piezoelectric
menghasilkan sebuah tegangan yang akan mengarah pada jalur bolak - balik dengan frekuensi yang sama.
Besar amplitudo sinyal elektrik yang dihasilkan unit sensor penerima tergantung dari jauh dekatnya objek yang dideteksi serta kualitas dari sensor pemancar dan sensor penerima. Proses sensing yuang dilakukan pada sensor ini menggunakan metode pantulan untuk menghitung jarak antara sensor dengan obyek sasaran. Jarak antara sensor tersebut dihitung dengan cara mengalikan setengah waktu yang digunakan oleh sinyal ultrasonik dalam perjalanannya dari rangkaian Tx sampai diterima oleh rangkaian Rx, dengan kecepatan rambat dari sinyal ultrasonik tersebut pada media rambat yang digunakannya, yaitu udara.Waktu di hitung ketika pemencar aktif dan sampai ada input dari rangkaian penerima dan bila pada melebihi batas waktu tertentu rangkaian penerima tidak ada sinyal input maka dianggap tidak ada halangan didepannya.
Gambar 1. Sensor Ultrasonik
Pengukuran jarak berbasis ultrasonik dapat dilakukan dengan dua metode yaitu:
1. Perhitungan waktu tempuh (ElecFreaks 2015).
Pada medium rambat udara, gelombang ultrasonik memiliki kecepatan tempuh 340 m/s. Berdasarkan nilai tersebut, pengukuran jarak dapat dilakukan dengan mengamati waktu tempuh gelombang dari transmitter hingga diterima oleh receiver.
Mengingat jarak yang ditempuh gelombang bersifat bolak-balik, maka perhitungan jarak metode ini berdasarkan datasheet sensor adalah:
Distance = 340× t ÷2m
2. Perhitungan jumlah pulsa (ElecFreaks 2015).
Transmitter akan mengeluarkan deretan pulsa burst dengan nilai tertentu saat diberikan pulsa trigger. Untuk setiap satu sentimeter, jumlah pulsa yang dihasilkan adalah 29 pulsa, sehingga jarak tempuh total dapat dihitung berdasarkan jumlah
pulsa yang diterima oleh receiver. Seperti halnya metode pertama, jalan tempuh deretan pulsa bersifat bolak-balik sehingga perhitungannya berdasarkan datasheet menjadi:
Distance = pulse count ÷58cm.
Hal-hal yang dapat menyebabkan sensor ultrasonic tidak teliti untuk mengukur jarak suatu objek adalah sebagai berikut :
1. Jarak objek tersebut diluar jangkauan ukur (< 3cm atau > 300cm).
2. Sudut objek terhadap sensor (θ) < 45°, sudut yang terlalu kecil antara sensor jarak ultrasonik dan objek sehingga gelombang ultrasonik tidak dapat dipantulkan kembali ke sensor.
3. Objek tersebut terlalu kecil untuk memantulkan gelombang ultrasonik kembali ke sensor.
4. Jenis material objek yang bersifat meredam suara, bentuk permukaan yang tidak beraturan, sudut ruangan, dan lain- lain sehingga mungkin tidak dapat memantulkan gelombang ultrasonik yang cukup untuk dideteksi dengan teliti
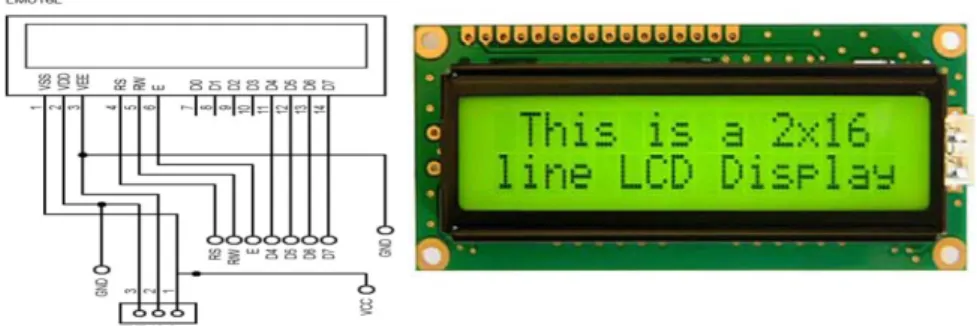
2.3 LCD (Liquid Crystal Display)
Layar LCD merupakan suatu media penampilan data yang sangat efektif dan efisien dalam penggunaannya.Untuk menampilkan sebuah karakter pada layar LCD diperlukan beberapa rangkaian tambahan.Untuk lebih memudahkan para pengguna, maka beberapa perusahaan elektronik menciptakan modul LCD.
Gambar 2. LCD 2 x 16 karakter
LCD dibagi menjadi dua bagian yaitu bagian depan panel LCD yang terdiri dari banyak dot atau titik LCD dan mikrokontroler yang menempel pada bagian
belakang panel LCD yang berfungsi untuk mengatur titik-titik LCD sehingga dapat menampilkan huruf, angka, dan simbol khusus yang dapat terbaca.
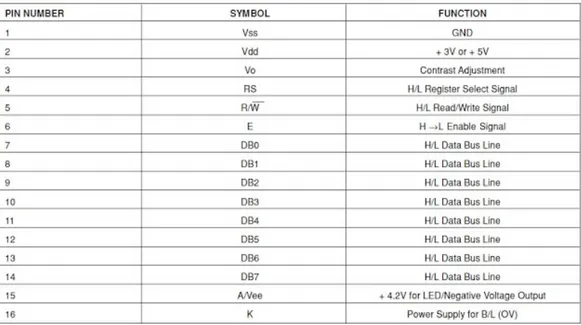
2.3.1 Fungsi Pin-Pin LCD
Modul LCD berukuran 16 karakter x 2 baris dengan fasilitas backlighting memiliki 16 pin yang terdiri dari 8 jalur data, 3 jalur kontrol dan jalur-jalur catu daya, dengan fasilitas pin yang tersedia maka lcd 2 x 16 dapat digunakan secara maksimal untuk menampilkan data yang dikeluarkan oleh mikrokontroler, secara ringkas fungsi pin-pin pada LCD dituliskan pada Tabel 2.3.1
Table 1. Konfigurasi Pin LCD 2 x 16
Sedangkan secara umum pin-pin LCD diterangkan sebagai berikut :
1. Pin 1 dan 2 Merupakan sambungan catu daya, Vss dan Vdd. Pin Vdd dihubungkan dengan tegangan positif catu daya, dan Vss pada 0V atau ground.
Meskipun data menentukan catu 5 Vdc (hanya pada beberapa mA), menyediakan 6V dan 4.5V yang keduanya bekerja dengan baik, bahkan 3V cukup untuk beberapa modul.
2. Pin 3 merupakan pin kontrol Vee, yang digunakan untuk mengatur kontras display. Idealnya pin ini dihubungkan dengan tegangan yang bisa diubah untuk memungkinkan pengaturan terhadap tingkatan kontras display sesuai dengan
kebutuhan, pin ini dapat dihubungkan dengan variable resistor sebagai pengatur kontras.
3. Pin 4 merupakan Register Select (RS), masukan yang pertama dari tiga command control input. Dengan membuat RS menjadi high, data karakter dapat ditransfer dari dan menuju modulnya.
4. Pin 5 Read/Write (R/W), untuk memfungsikan sebagai perintah write maka R/W low atau menulis karakter ke modul. R/W high untuk membaca data karakter atau informasi status dari register-nya.
5. Pin 6 Enable (E), input ini digunakan untuk transfer aktual dari perintah-perintah atau karakter antara modul dengan hubungan data. Ketika menulis ke display, data ditransfer hanya pada perpindahan high atau low. Tetapi ketika membaca dari display, data akan menjadi lebih cepat tersedia setelah perpindahan dari low ke high dan tetap tersedia hingga sinyal low lagi.
6. Pin 7 sampai 14 adalah delapan jalur data/data bus (D0 sampai D7) dimana data dapat ditransfer ke dan dari display.
7. Pin 16 dihubungkan kedalam tegangan 5 Volt untuk memberi tegangan dan menghidupkan lampu latar/Back Light LCD.
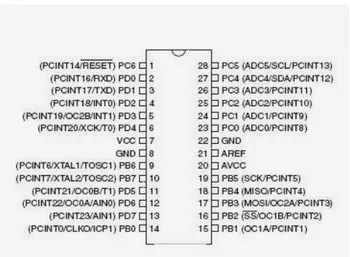
2.4 Mikrokontroller ATMega 328
ATMega328 adalah mikrokontroller keluaran dari atmel yang mempunyai arsitektur RISC (Reduce Instruction Set Computer) yang dimana setiap proses eksekusi data lebih cepat dari pada arsitektur CISC (Completed Instruction Set Computer).
ATMega328 merupakan mikrokontroler keluarga AVR 8 bit. Beberapa tipe mikrokontroler yang sama dengan ATMega8 ini antara lain ATMega8535, ATMega16, ATMega32, ATmega328, yang membedakan antara mikrokontroler antara lain adalah, ukuran memori, banyaknya GPIO (pin input/output), peripherial (USART, timer, counter, dll). Dari segi ukuran fisik, ATMega328 memiliki ukuran fisik lebih kecil dibandingkan dengan beberapa mikrokontroler diatas. Namun untuk segi memori dan periperial lainnya ATMega328 tidak kalah dengan yang lainnya karena ukuran memori dan periperialnya relatif sama dengan ATMega8535,
ATMega32, hanya saja jumlah GPIO lebih sedikit dibandingkan mikrokontroler diatas.
Gambar 3. Pin Mikrokontroler Atmega328
ATMega328 memiliki 3 buah PORT utama yaitu PORTB, PORTC, dan PORTD dengan total pin input/output sebanyak 23 pin. PORT tersebut dapat difungsikan sebagai input/output digital atau difungsikan sebagai periperal lainnya.
1. Port B
Port B merupakan jalur data 8 bit yang dapat difungsikan sebagai input/output.
Selain itu PORTB juga dapat memiliki fungsi alternatif seperti di bawah ini a. ICP1 (PB0), berfungsi sebagai Timer Counter 1 input capture pin.
b. OC1A (PB1), OC1B (PB2) dan OC2 (PB3) dapat difungsikan sebagai keluaran PWM (Pulse Width Modulation).
c. MOSI (PB3), MISO (PB4), SCK (PB5), SS (PB2) merupakan jalur komunikasi SPI.
d. Selain itu pin ini juga berfungsi sebagai jalur pemograman serial (ISP).
e. TOSC1 (PB6) dan TOSC2 (PB7) dapat difungsikan sebagai sumber clock external untuk timer.
f. XTAL1 (PB6) dan XTAL2 (PB7) merupakan sumber clock utama mikrokontroler.
2. Port C
Port C merupakan jalur data 7 bit yang dapat difungsikan sebagai input/output digital. Fungsi alternatif PORTC antara lain sebagai berikut.
a. ADC6 channel (PC0,PC1,PC2,PC3,PC4,PC5) dengan resolusi sebesar 10 bit.
ADC dapat kita gunakan untuk mengubah input yang berupa tegangan analog menjadi data digital
b. I2C (SDA dan SDL) merupakan salah satu fitur yang terdapat pada PORTC.
I2C digunakan untuk komunikasi dengan sensor atau device lain yang memiliki komunikasi data tipe I2C seperti sensor kompas, accelerometer nunchuck.
3. Port D
Port D merupakan jalur data 8 bit yang masing-masing pin-nya juga dapat difungsikan sebagai input/output. Sama seperti Port B dan Port C, Port D juga memiliki fungsi alternatif dibawah ini.
a. USART (TXD dan RXD) merupakan jalur data komunikasi serial dengan level sinyal TTL. Pin TXD berfungsi untuk mengirimkan data serial, sedangkan RXD kebalikannya yaitu sebagai pin yang berfungsi untuk menerima data serial.
b. Interrupt (INT0 dan INT1) merupakan pin dengan fungsi khusus sebagai interupsi hardware. Interupsi biasanya digunakan sebagai selaan dari program, misalkan pada saat program berjalan kemudian terjadi interupsi hardware/software maka program utama akan berhenti dan akan menjalankan program interupsi.
c. XCK dapat difungsikan sebagai sumber clock external untuk USART, namun kita juga dapat memanfaatkan clock dari CPU, sehingga tidak perlu membutuhkan external clock.
d. T0 dan T1 berfungsi sebagai masukan counter external untuk timer 1 dan timer 0.
e. AIN0 dan AIN1 keduanya merupakan masukan input untuk analog comparator.
2.4.1. Fitur ATMega328
ATMega328 adalah mikrokontroler keluaran dari atmel yang mempunyai arsitektur RISC (Reduce Instruction Set Computer) yang mana setiap proses eksekusi
data lebih cepat dari pada arsitektur CISC (Completed Instruction Set Computer).
Mikrokontroler ini memiliki beberapa fitur antara lain:
1. Memiliki EEPROM (Electrically Erasable Programmable Read Only Memory) sebesar 1KB sebagai tempat penyimpanan data semi permanen karena EEPROM tetap dapat menyimpan data meskipun catu daya dimatikan.
2. Memiliki SRAM (Static Random Access Memory) sebesar 2KB.
3. Memiliki pin I/O digital sebanyak 14 pin 6 diantaranya PWM (Pulse Width Modulation) output.
4. 32 x 8-bit register serba guna.
5. Dengan clock 16 MHz kecepatan mencapai 16 MIPS.
6. 32 KB Flash memory dan pada arduino memiliki bootloader yang menggunakan 2 KB dari flash memori sebagai bootloader.
2.5 Buzzer
Buzzer adalah sebuah komponen elektronika yang dapat mengubah sinyal listrik menjadi getaran suara. Pada umumnya, buzzer yang merupakan sebuah perangkat audio ini sering digunakan pada rangkaian anti maling, alarm pada jam tangan, bel rumah, peringatan mundur pada truk dan perangkat peringatan bahaya lainnya. Jenis buzzeryang sering ditemukan dan digunakan adalah buzzer yang berjenis piezoelectric.
Gambar 4. Buzzer
Hal ini dikarenakan buzzer piezoelectric memiliki berbagai kelebihan seperti lebih murah, relatif lebih ringan dan lebih mudah dalam menggabungkannya ke rangkaian elektronika lainnya. Buzzer yang termasuk dalam keluarga transduserini juga sering disebut dengan beeper.
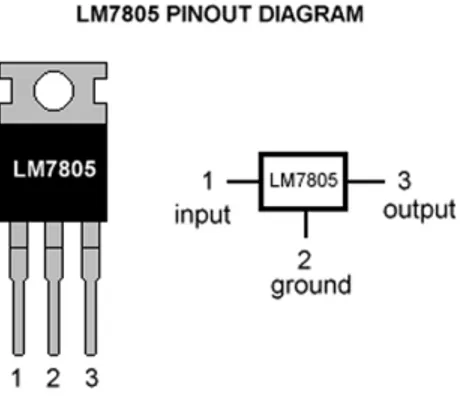
2.6 IC 7805 Regulator Tegangan
Voltage regulator IC adalah IC yang digunakan untuk mengatur tegangan . IC 7805 adalah Regulator 5V Voltage yang membatasi output tegangan 5V dan menarik 5V diatur power supply. Muncul dengan ketentuan untuk menambahkan heatsink .Nilai maksimum untuk input ke regulator tegangan 35V. Hal ini dapat memberikan aliran tegangan stabil konstan 5V untuk input tegangan yang lebih tinggi sampai batas ambang 35V. Jika tegangan dekat 7.5V maka tidak menghasilkan panas dan karenanya tidak perlu untuk heatsink . Jika input tegangan lebih , maka kelebihan listrik dibebaskan sebagai panas dari 7805. Ini mengatur output stabil 5V jika tegangan input adalah marah dari 7.2V ke 35V. Oleh karena itu untuk menghindari kehilangan daya mencoba mempertahankan input ke 7.2V.
Dalam beberapa fluktuasi tegangan sirkuit fatal ( untuk misalnya Microcontroller ), untuk situasi semacam itu untuk memastikan tegangan konstan IC 7805 Voltage Regulator digunakan . Untuk informasi lebih lanjut tentang spesifikasi dari 7805 Voltage Regulator silakan lihat lembar data di sini (IC 7805 Voltage Regulator Data Sheet). IC 7805IC 7805 adalah serangkaian 78XX regulator tegangan. Ini standar, dari nama dua digit terakhir menunjukkan 05 jumlah tegangan yang mengatur. Oleh karena itu 7805 akan mengatur 5V dan 7806 akan mengatur 6V dan seterusnya. Skema yang diberikan di bawah ini menunjukkan bagaimana menggunakan IC 7805, ada 3 pin di IC 7805, pin 1 mengambil tegangan input dan pin 3 menghasilkan tegangan output. The GND dari kedua input dan out yang diberikan ke pin 2.
Gambar 5. IC LM 7805
2.7 Motor Servo
Motor servo adalah sebuah perangkat atau aktuator putar (motor) yang dirancang dengan sistem kontrol umpan balik loop tertutup (servo), sehingga dapat di set-up atau di atur untuk menentukan dan memastikan posisi sudut dari poros output motor.
Motor servo merupakan perangkat yang terdiri dari motor DC, serangkaian gear, rangkaian kontrol dan potensiometer. Serangkaian gear yang melekat pada poros motor DC akan memperlambat putaran poros dan meningkatkan torsi motor servo, sedangkan potensiometer dengan perubahan resistansinya saat motor berputar berfungsi sebagai penentu batas posisi putaran poros motor servo.
Penggunaan sistem kontrol loop tertutup pada motor servo berguna untuk mengontrol gerakan dan posisi akhir dari poros motor servo. Ada dua jenis motor servo, yaitu motor servo AC dan DC. Motor servo AC lebih dapat menangani arus yang tinggi atau beban berat, sehingga sering diaplikasikan pada mesin-mesin industri. Sedangkan motor servo DC biasanya lebih cocok untuk digunakan pada aplikasi-aplikasi yang lebih kecil. Dan bila dibedakan menurut rotasinya, umumnya terdapat dua jenis motor servo, yaitu
motor servo rotation 180⁰ dan servo rotation continuous.
1. Motor servo standard (servo rotation 180⁰) Motor mervo 180o adalah jen is yang paling umum dari motor servo, dimana putaran poros outputnya terbatas hanya 90⁰ kearah kanan dan 90⁰ kearah kiri. Dengan kata lain total putarannya hanya setengah lingkaran atau 180⁰.
2. Motor servo rotation continuousmerupakan jenis motor servo yang sebenarnya sama dengan jenis servo standard, hanya saja perputaran porosnya tanpa batasan atau dengan kata lain dapat berputar terus, baik ke arah kanan maupun kir
Gambar 6. Motor Servo
BAB 3 PERANCANGAN ALAT
3.1 Perancangan Sistem
pada tahap perancangan system akan dibagi menjadi beberapa bagian utama, yaitu diagram, flowcart, penentuan komponen yang digunakan dan perancangan rangkaian tempat sampah otomatis
3.2 Blok Diagram
Diagram blok merupakan salah satu bagian terpenting dalam perancangan peralatan elektronika, karena dari diagram blok dapat diketahui prinsip kerja keseluruhan dari rangkaian elektronika yang dibuat. Sehingga keseluruhan blok dari alat yang dibuat dapat membentuk suatu sistem yang dapat bekerja sesuai dengan perencanaan. Diagram blok dari tempat sampah otomatis dapat dilihat pada gambar 7.
Gambar 7. Diagram Blok Sistem Sensor
ultrasonic 1
Display
Mikrokontroller ATMega 328
PSA
Buzzer Sensor
Ultrasonic 2
Servo
Adapun fungsi-fungsi blok dari diagram blok sebagai berikut:
1. Blok PSA sebagai sumber tegangan ke mikrokontroler dan sensor
2. Blok sensor ultrasonic sebagai pendeteksi user yang akan membuang sampah dan sebagai pendeteksi kapasitas sampah
3. Blok mikrokontroler ATMega328 sebagai otak dari system yang memperoses data dari sensor
4. Blok display sebagai penampil angka level kapasitas sampah
5. Blok Motor Servo berfungsi sebagai penggerak buka dan tutup tempat sampah.
6. Blok Buzzer berfungsi sebagai notifikasi suara. Prinsip dari buzzer sendiri akan bekerja sebagai notifikasi suara ketika keadaan sensor HC-SR04 mendeteksi jarak tumpukkan sampah hampir penuh
3.3 Penentuan Komponen Tempat Sampah
Penentuan kompenen yang akan dipakai dibagi menjadi dua kelompok, yaitu komponen fisik dan komponen elektronik. Komponen fisik digunakan untuk membuat kerangka tempat sampah, body utama, mekanis tempat sampah. Komponen elektronik digunakan untuk merancang rangkaian elektronik. Tabel rincian peralatan dan komponen yang dipakai sebagaimana terlihat pada Tabel 2., Tabel 3., Tabel 4., Tabel 2. Peralatan.
Nama Alat Fungsi
Gerinda Untuk memotong acrylic
Bor duduk Untuk melubangi papan PCB,akritik, dan komponen lainnya Solder dan timah Soldering
Penggaris Alat ukur
Obeng Memasang dan membuka baut Tang Memotong kabel, mengunci mur
Multitester digital Pengukuran satuan listrik (tegangan, arus, dan timbangan)
Glue gun Pengeleman
Cutter Memotong Styrofoam
Setrika Menggosong gambar rangkaian ke PCB Larutan fericlorida Melarutkan kuningan PCB
Tabel 3. Komponen Fisik
Nama Keterangan
Tempat sampah Body tempat sampah
Tabel 4. Komponen Elektronik.
Nama Keterangan
Mikrokontroler ATMega328
Processor utama
Sensor ultrasonik Pendeteksi benda
Kabel pelangi Konektor sensor, display, & led
PSA Sumber arus
Resistor Komponen sirkuit Buzzer Notifikasi suara
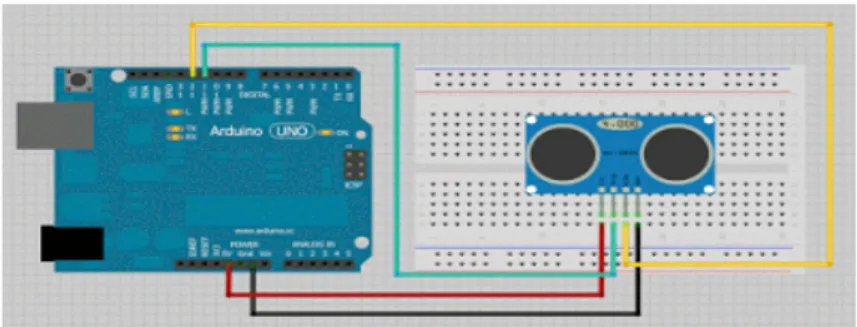
3.4 Perancangan Rangkaian Sensor HC-SR04
Pada perancangan alat ini menggunakan 2 buah HC-SR04. Yang masing masing dari kedua HC-SR04 berfungsi untuk menditeksi benda yang ada di depannya. Alat ini memiliki 4 pin, pin Vcc, Gnd, Trigger, dan Echo. Pin Vcc untuk
listrik positif dan Gnd untuk ground-nya. Pin Trigger untuk trigger keluarnya sinyal dari sensor dan pin Echo untuk menangkap sinyal pantul dari benda. Pada pin HC- SR04 langsung terhubung dengan mikrokontroler arduino sebesar 5 volt. Rangkaian HC-SR04 dapat dilihat pada gambar 8.
Gambar 8. Rangkaian sensor Ultrasonik HC-SR04.
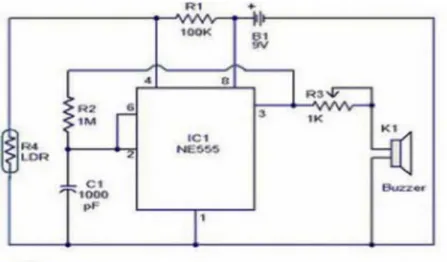
3.5 Rangkaian Buzzer
Rangkaian Buzzer atau biasa disebut rangkaian alarm pengingat pesan dan tanda, tentu sudah sering anda temukan di beberapa perangkat elektronik. Di masa era teknologi modern ini, tentu alarm sudah tersedia di beberapa perangkat elektronik. Mulai dari handphone dan juga jam memiliki alarm sebagai tanda peringatan tersebut. Dan tentunya rangkaian buzzer atau rangkaian alarm ini menjadi salah satu rangkaian penunjang di beberapa perangkat elektronik tersebut. Namun tidak jarang rangkaian ini sering berdiri sendiri sebagai perangkat elektronik tunggal.
Dan anda bisa merangkai sendiri rangkaian ini dengan menggunakan beberapa komponen yang bisa anda temukan dengan mudah rangkaian Buzzer dapat dilihat pada gambar 9.
Gambar 9. Skema Rangkaian Buzzer
3.6 Perancangan Rangkaian Liquid Crystal Display (LCD)
Pada alat ini, display yang digunakan adalah LCD (Liquid Crystal Display) 2 x 16. Untuk blok ini tidak ada komponen tambahan karena mikrokontroler dapat memberi data langsung ke LCD, pada LCD Hitachi - M1632 sudah terdapat driver untuk mengubah data ASCII output mikrokontroler menjadi tampilan karakter.
Pemasangan potensio sebesar 5 kΩ untuk mengatur kontras karakter yang tampil.
Gambar 13. berikut merupakan gambar rangkaian LCD yang dihubungkan ke mikrokontroler. Rangkaian LCD dapat dilihat pada gambar 10.
Gambar 10. Sistem Kerja Rangkaian LCD
Dari gambar 10, rangkaian ini terhubung ke PC.0... PC.5, yang merupakan pin I/O dua arah dan SPI mempunyai fungsi khusus sebagai pengiriman data secara serial. Sehingga nilai yang akan tampil pada LCD display akan dapat dikendalikan oleh Mikrokontroller ATMega8535.
1. Pin 1 dan 2
Merupakan sambungan catu daya, Vss, dan Vdd. Pin Vdd dihubungkandengan tegangan positif catu daya, dan Vss pada 0 volt atau ground.
2. Pin 3
Merupakan pin kontrol Vcc yang digunakan untuk mengatur kontras display.
3. Pin 4
Merupakan register select (RS), masukan yang pertama dari tiga command control input. Dengan membuat RS menjadi high, data karakter dapat ditransfer dari dan menuju modulnya.
4. Pin 5
Read/Write (R/W). Untuk memfungsikan sebagai perintah Write makaR/W low atau menulis karakter ke modul.
5. Pin 6
Enable (E), input ini digunakan untuk transfer aktual dari perintahperintah atau karakter antara modul dengan hubungan data.
6. Pin 7 sampai 14
Pin 7 sampai 14 adalah delapan jalur data (D0 – D7) dimana data dapat ditransfer ke dan dari display.
7. Pin 15 dan 16
Pin 15 atau A (+) mempunyai level DC +5 V berfungsi sebagai LED backlight (+) sedangkan pin 16 yaitu K (-) memiliki level 0 V
Pada program LCD, di perlukan deklarasi register untuk mikrokontroller jenis ATMega8535. Setelah mendeklarasi register, maka program akan masuk ke dalam program utama. Program ini akan menginisialisasi LCD dan akan menampilkan karakter dan tulisan di LCD.
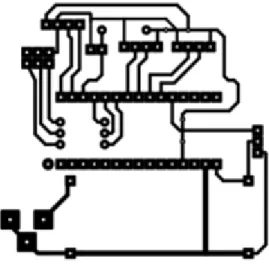
3.7 Perancangan PCB (Printed Circuiet Board)
Printed Circuiet Board (PCB) adalah sebuah papan rangkaian yang terbuat dari bahan ebonit (Pertinax) atau fiber glass dimana salah satu sisi permukaanya dilapisi dengan
tembaga tipis. Berdasarkan susunan PCB terbagi menjadi tiga jenis, yang pertama PCB Single Layer merupakan PCB polos yang hanya memiliki 1 lapisan tembaga pada salah satu sisinya, PCB Double Layer merupakan PCB polos yang memiliki 2 lapisan tembaga pada kedua sisinya dan PCB Matrik Strip Board merupakan PCB yang memiliki 1 sisi tembaga dan memiliki lubang-lubang dengan ukuran normal 0,8 – 1 mm.
Perancangan PCB pada pembuatan sistem tempat sampah otomatis ini menggunakan software PROTEUS 8.0. Proteus adalah sebuah software berbasis windows yang dapat digunakan untuk mendesain pcb yang juga dilengkapi dengan simulasi pspice pada level skematik sebelum rangkaian skematik di cetak pada PCB.
Dengan perancangan yang tepat akan didapatkan layout jalur PCB yang tersusun rapi dan mudah digunakan. Lebar dan jarak antara jalur juga harus diperhitungkan agar tidak terjadi kesalahan atau hubungan singkat akibat jalur yang terlalu rapat dan sempit. Perancangan tata letak PCB dapat dilihat pada gambar 11.
Gambar 11. Tata Letak Jalur PCB
Tata letak komponen adalah susunan komponen-komponen elektronika dari gambar diagram skematik yang akan dipasangkan pada permukaan PCB yang berkebalikan dengan jalur PCB. Susunan komponen elektronika tersebut harus bersesuaian dengan jalur PCB. Setiap komponen yang akan dipasang mempunyai ukuran harusbersesuaian dengan jalur PCB. Setiap komponen yang akan dipasang mempunyai ukuran yang tepat dan ruang yang cukup pada permukaan PCB.
Perancangan tata letak komponen PCB dapat dilihat pada gambar 12.
Gambar 12. Tata Letak Komponen PCB
3.8 Perancangan Rangkaian Power Supplay Adaptor (PSA)
Rangkaian power supplay pada alat ini berfungsi sebagai sumber daya untuk menghidupkaan sistem. Dalam rangkaian ini peneliti memakai IC regulator 7805 digunakan untuk menurunkaan tegangan 12 volt menjadi 5 volt. Dimana masukan rangkaian ini adalah dari baterai sebesar 12 volt dan keluaran rangkaian ini sebesar 5 volt dan akan di pergunakan untuk menghidupkan sistem dalam penelitian ini.
Rangkaian power supply berfungsi untuk mensuply arus dan tegangan ke seluruh rangkaian yang ada. Rangkaian power suplly ini terdiri dari dua keluaran yaitu 5 volt dan dan 12 volt. Keluaran 5 volt untuk menghidupkan seluruh rangkaian.
Trafo stepdown yang berfungsi untuk menurunkan tegangan dari 220 volt AC menjadi 12 volt AC akan disearahkan dengan menggunakan dioda, selanjutnya 12 volt DC akan diratakan oleh kapasitor 3300 uF. Regulator tegangan 5 volt (LM7805CT) akan digunakan agar keluaran yang dihasilkan tetap 5 volt walaupun terjadi perubahan pada tegangan masukannya. LED hanya sebaggai indikator apabila PSA dinyalakan. Tegangan 12 volt DC langsung diambil dari keluaran jembatan dioda.
Dalam pengujian rangkaian ini dengan mengukur tegangan keluaran dari power supply menggunakan multimeter digital. Setelah dilakukan pengukuran maka diperoleh besarnya tegangan keluaran sebesar 5 volt. Setelah itu rangkaian power supply dihubungkan ke sumber arus listrik dan saklar ON/OFF diaktifkan ke posisi ON. Rangkain PSA (Power Supplay Adaptor) dapat dilihat pada gambar 13.
Gambar 13. Rangkaian PSA (Power Supplay Adaptor)
3.9 Perancangan Rangkaian Mikrokontroller Atmega328
Gambar 14. Rangkaian Sistem Minimum Mikrokontroler ATMega328
Rangkaian sistem minimum mikrokontroler ATMEGA328 tersebut berfungsi sebagai pusat kendali dari seluruh sistem yang ada. Komponen utama dari rangkaian ini adalah IC Mikrokontroler Atmega32. Semua program diisikan pada memori dari IC ini sehingga rangkaian dapat berjalan sesuai dengan yang dikehendaki.
3.10 Diagram Alir (flowchart)
Dalam membuat suatu alat ada beberapa hal yang perlu diperhatikan, yaitu bagaimana cara merancang sistem yang akan diimplementasikan pada alat. Dalam perancangan sistem perlu dibuat flowchart dari sistem tersebut, seperti gambar 15.
Tidak
Ya
Tidak
Ya
Gambar 15. Diagram Alir (flowchart) Mulai
Inisialisasi
Baca sensor HC-SR04 (1)
Apakah Jarak
<50cm ?
Tutup Tempat Sampah Terbuka
Selesai Baca Sensor HC-SR04 (2)
Sampah Penuh
Buzzer
BAB 4 HASIL DAN PEMBAHASAN
4.1 Hasil Pengujian Rangkaian Mikrokontroler ATMega 328
Pengujian pada rangkaian mikrokontroler ATMega 328 ini dapat dilakukan dengan menghubungkan rangkaian ini dengan rangkaian power suplay sebagai sumber tegangan. Pemrograman menggunakan mode ISP (In System Programming) mikrokontroler harus dapat deprogram langsung pada papan rangkaian dan rangkaian mikrokontroler harus dapat dikenali oleh program downloader. Pada pengujian ini berhasil dilakukan dengan dikenalinya jenis mikrokontroler oleh program downloader yaitu Atmega 328.
Gambar 16. Informasi Signature Mikrokontroler
4.2 Hasil Pengujian Rangkaian Interfacing LCD
LCD dot matriks 2 x 16 karekater dapat dihubungkan langsung dengan mikrokontroler ATMega 328, disini fungsi LCD adalah sebagai tampilah hasil pengukuran dan diberi beberapa keterangan. Pada penelitian ini LCD dihubungkan kemikrokontroler melalui PortC.0 ~ PortC.5 yang berfungsi bus data. Adapaun data yang dikirimkan oleh mikrokontroler merupakan kode ASCII data dalam bentuk bilangan biner, dimana data tersebut dapat diterjemahkan oleh LCD ke bentuk karakter.
Pengiriman data yang dari mikrokontroler diatur oleh pin EN, RS dan RW.
Jalur EN dinamakan Enable. Jalur ini digunakan untuk memberi tahu LCD bahwa ada data yang sedang dikirimkan. Untuk mengirim data ke LCD, maka melalui program EN harus dibuat berlogika “low” dan set (high) pada dua jalur kontrol yang lain (RS dan RW). Jalur RW adalah jalur kontrol Read/write. Ketika RW berlogika low (0), maka informasi pada bus akan dituliskan pada LCD. Ketika RW berlogika high (1), maka program melakukan pembacaan memori dari LCD. Dalam penelitian ini umumnya pin RW selalu diberikan logika low(0)
Dengan mengikuti keterangan diatas kita dapat membuat program untuk menampilkan karakter pada LCD. Program yang diisikan ke mikrokontroler untuk menampilkan karakter pada LCD adalah sebagai berikut :
#include <io.h>
#include <mega328.h>
#include <stdio.h>
#include <alcd.h>
void main() {
lcd_gotoxy(0,0);
lcd_putsf(“inisialisasi...”);
delay_ms(1000);
lcd_clear();
}
4.3 Pengujian Rangkaian Sensor HC-SR04
Pengujian sensor ultrasonik bertujuan untuk mengetahui jarak minimum dan maksimum yang dapat diukur oleh sensor ultrasonik HC-SR04 serta membandingkan arak sebenarnya dengan jarak hasil pengukuran menggunakan sensor ultrasonik HC SR04. Pengujian rangkaian sensor ultrasonik HC-SR04 dilakukan dengan menghubungkan antara modul sensor ultraonik HC-SR04 dengan rangkaian mikrokontroler ATmega328 pada rangkaian sistem minimum. Pin – pin pada HC- SR04 yang dihubungkan antara lain pin sumber tegangan +5v dihubungkan dengan kutub positif pada supply, Pin Trigger dihubungkan dengan pin3, Pin Echo dihubugkan dengan pin4 dan pin Ground dihubungkan dengan kutub negatif pada supply.
Cara kerja dari sensor ultrasonik HC-SR04 adalah mula – mula HC-SR04 diaktifkan melalui pin Trigger minimal 10 μs dengan mengirimkan pulsa positif dari IC mikrokontroler. Selanjutnya pin TX akan mengirim sinyal pada saat logika 1 atau high yang mengenai penghalang dan sinyal pantulan dari penghalang akan diterima oleh RX. Pada saat menerima sinyal pantulan, RX berlogika 0 atau low, dimana sinyal dari RX akan dilewatkan melalui pin Echo. Lebar sinyal dari Echo inilah yang akan digunakan untuk pengukuran jarak. Selanjutnya adalah melakukan ujicoba pegukuran jarak sensor ultrasonik HC-SR04 dengan cara menempatkan sensor ultrasonik di depan penghalang dan memvariasi jarak pengukuran.
Tabel 5. Hasil Pengujian Sensor HC-SR04 Terhadap Objek Pengukuran Jarak dengan
Penggaris (cm)
Kondisi Tutup Tempat Sampah
10 Terbuka
20 Terbuka
30 Terbuka
40 Terbuka
50 Terbuka
60 Terbuka
70 Terbuka
80 Tertutup
4.4 Pengujian Rangkaian Servo
Pada pengujian motor servo ini ada dua posisi utama, maka dibuat secara khusus untuk mengatur motor servo tersebut, dengan cara memberikan pulsa digital dengan lebar yang berbeda-beda. Dua posisi utama tersebut adalah membuat motor servo berada pada posisi 15 derajat dan 95 derajat. Berikut adalah programnya:
#include <servo.h>
Servo myservo;
Void setup(){
myservo attach(10);
serial begin(9600);
}
Void loop(){
myservo writer(15);
delay(5000);
{
myservo writer(95);
delay(5000);
} {
Setelah itu program didownload ke mikrokontroler. Motor servo akan berada pada posisi 15 derajat dan 95 derajat selama lima detik.
4.5 Pengujian Sistem
Pada bab ini akan dijelaskan pengujian system dari tempat sampah otomatis dengan Buzzer. Pada tahap pengujian alat ini digunakan perangkat lunak dan perangkat keras, sehingga system yang dibangun dapat berjalan dengan baik. Pada tempat sampah otomatis terdapat beberapa fitur yaitu tutup tempat sampah terbuka dan tertutup otomatis sesuai dengan keberadaan manusia dan kondisi tempat sampah, buzzer sebagai pemberitahuan sebagai bahwa tempat sampah telah penuh.
Pengujian dilakukan berdasarkan sesuai kerja hardware. Berikut ini adalah uji coba saat sensor HC-SR04 (1) mendeteksi adanya objek mendekat, ketika jarak tidak lebih dari 80cm otomatis motor servo bekerja sehingga tutup tempat sampah membuka dengan sendirinya seperti yang terlihat pada Gambar 17.
Gambar 17. Tampilan Tempat Sampah Terbuka
Keadaan ini terlihat pintu akan tetap terbuka selama objek pada jangkauan jarak tidak melebihi batas dari 80 cm. Hal ini dikarenakan mikrokontroler sudah diprogram untuk sensor HCSR04 (1) akan mengirimkan gelombang ultrasonik dengan jangakuan jarak 50 cm, sehingga saat terhalang objek dengan jarak tidak melebihi 80 cm gelombang pantul akan ditangkap pin echo pada sensor HC-SR04.
Namun jika objek menjauh tidak dalam jangkauan maka tutup tempat sampah akan tertutup secara otomatis seperti yang terlihat pada Gambar 18.
Gambar 18. Tampilan Tempat Sampah Tertutup.
Berikutnya adalah ketika keadaan sampah penuh sensor HC-SR04 (2) yang terletak didalam tepatnya bagian atas tutup tempat sampah sensor HC-SR04 (2) ini akan mengukur jarak dari ujung tempat sampah, jika jarak yang dibaca oleh sensor berubah dalam waktu yang lama yang menandakan tempat sampah telah penuh maka akan ada notifikasi suara dari buzzer
.
Gambar 19. Tampilan Tempat Sampah Penuh
BAB 5 KESIMPULAN DAN SARAN
5.1 Kesimpulan
Dari Pengujian yang telah dilakukan dapat kesimpulan yaitu:
1. Rancangan system yang dibuat berhasil dalam membuka dan menutup serta mendeteksi kapasitas tempat sampah sesuai dengan fungsi system.
2. Tempat sampah tidak terbuka jika tempat sampah telah penuh.
3. Sensor HC-SR04 dapat dijadikan sebagai pengukur kapasitas tempat sampah dan mendeteksi manusia.
4. Prinsip kerja pada sensor HC-SR04 adalah memancarkan gelombang ultrasonic kemudian diterima balik oleh receiver ultrasonic.
5.2 Saran
1. Diharapkan dapat ditambahkan notifikasi suara speaker
2. Diharapkan tempat sampah dibuat lebih menarik dan lebih praktis.
3. Diharapkan dapat mengetahui berapa lama tahannya terbuka dan tertutup tempat sampah
4. Pada penelitian selanjutnya diharapkan penulis dapat memberbaiki segala kekurangan dari penelitian ini.
DAFTAR PUSTAKA
Daryanto. 2008. “Pengetahuan Teknik Elektronika”. Jakarta : Bumi Aksara
Bejo, Agus. 2008. “C & AVR Rahasia Kemudahan Bahasa C dalam Mikrokontriler”.
Yogyakarta : Graha Ilmu
Anindya, S.F & Rachmat, H.H 2015. Implementasi Sistem Bel Rumah Otomatis Berbasis Sensor Ultrasonik Jurnal ELKOMIKA Teknik Elektro Itenas, volume 3 no 1:64-74 (online) http://puslit2.petra.ac.id/ejournal/17706
Budiharto, W. 2009. Membuat Sendiri Robot Cerdas.Edisi Revisi. PT Alex Media Komputindo, Jakarta.
Dewantoro, O.B 2009. Landasan Konseptual Perencanaan Dan Perancangan Pusat Pengelolaan Sampah Diy. Skripsi, Universitas Atma Jaya Yogyakarta.
Setiawan, D.S.T. & Iqbal, M. 2014 Rancangan Bagun Alat Pembuka dan Penutup Tong Sampah Otomatis Berbasis Microkontroler.Jurnal Teknologi dan Sistem Informasi, volume 1,no. 1, Hal 55,62, Desember 2014 (Online) http://is.its.ac.id/pubs/oajis/index.php/file/download_file/12890020
Sulistyowati, R. & Febrianto, D.D. 2012. Perancangan Prototype Sistem Kontrol dan Monitoring Pembatas Daya Listrik Berbasis Mikrokontroler. Universitas Kristen Petra: Jurnal IPTEK Vol.16:148-153
Lampiran 1. Program Keseluruhan
#include <LiquidCrystal.h>
#include <Servo.h>
#define trigPin A5
#define trig_Pin A1 // A1
#define echoPin A4
#define echo_Pin A0 // A0
#define BUZ 0 Servo bktutup;
LiquidCrystal lcd(12, 11, 13, 10, 8, 7);
char myBuffer[17] = ""; // width of LCD long ping_dalam (void);
long ping_luar (void);
void servo_buka (void);
void servo_tutup (void);
int kosong = 0;
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(trig_Pin, OUTPUT);
pinMode(echo_Pin, INPUT);
pinMode(BUZ, OUTPUT);
bktutup.attach(9);
bktutup.write(10);
int pos = 0;
lcd.begin(16,2);
servo_buka();
bktutup.write(10);
}
void loop() {
long j_dalam, j_luar;
while (1) {
j_dalam = ping_dalam();
if (j_dalam > 200) j_dalam = 200;
if (j_dalam > 4) break;
}
snprintf(myBuffer, sizeof(myBuffer), "D:%03d ", j_dalam);
lcd.setCursor(0,0);
lcd.print(myBuffer);
while(1)
{
j_luar = ping_luar();
if (j_luar > 200) j_luar = 200;
if (j_luar > 4) break;
}
snprintf(myBuffer, sizeof(myBuffer), "L:%03d ", j_luar);
lcd.setCursor(8,0);
lcd.print(myBuffer);
if (j_dalam < 10) {
lcd.setCursor(0,1);
lcd.print("Sampah penuh !");
digitalWrite(BUZ, HIGH);
delay(150);
digitalWrite(BUZ, LOW);
delay(100);
kosong = 1;
} else kosong = 0;
if (j_luar < 50) {
lcd.setCursor(0,1);
lcd.print("buka tong ... ");
bktutup.write(90);
delay(1000);
}
if (j_luar > 80) {
lcd.setCursor(0,1);
lcd.print("tutup tong ... ");
bktutup.write(10);
delay(1000);
}
if (kosong == 0) {
if (j_luar > 80) {
lcd.setCursor(0,1);
lcd.print("tutup tong ... ");
bktutup.write(10);
delay(1000);
} } }
long ping_dalam (void) {
long dur, dis;
digitalWrite(trigPin, LOW); // Added this line delayMicroseconds(2); // Added this line
digitalWrite(trigPin, HIGH);
delayMicroseconds(10); // Added this line digitalWrite(trigPin, LOW);
dur = pulseIn(echoPin, HIGH);
dis = (dur/2) / 29.1;
if (dis > 200) dis = 200;
delay(50);
return dis;
}
long ping_luar (void) {
long duration, distance;
digitalWrite(trig_Pin, LOW); // Added this line delayMicroseconds(2); // Added this line
digitalWrite(trig_Pin, HIGH);
delayMicroseconds(10); // Added this line digitalWrite(trig_Pin, LOW);
duration = pulseIn(echo_Pin, HIGH);
distance = (duration/2) / 29.1;
if (distance > 200) distance = 200;
delay(50);
return distance;
}
void servo_buka (void) {
int pos;
for (pos = 0; pos <= 90; pos += 10) { // goes from 0 degrees to 180 degrees
bktutup.write(pos); // tell servo to go to position in variable 'pos'
delay(100); // waits 15ms for the servo to reach the position
} }
void servo_tutup (void) {
int pos;
for (pos = 90; pos >= 8; pos -= 10) { // goes from 180 degrees to 0 degrees
bktutup.write(pos); // tell servo to go to position in variable 'pos'
delay(100); // waits 15ms for the servo to reach the position
} }
Lampiran 2. Rangkaian Keseluruhan
Lampiran 2. Foto Keseluruhan Alat