55
RANCANG BANGUN PEMANTAU DAN KENDALI ROBOT PEMBAWA NAMPAN OBAT PASIEN BERBASIS INTERNET OF THINGS
Chairuni Ariyani
Jurusan Teknik Elektro, Program Studi Sarjana Terapan Teknik Elektro Konsentrasi Mekatronika
Politeknik Negeri Sriwijaya, Palembang 30319 Indonesia [email protected] ABSTRACT
The internet has now become a commonplace thing we encounter, but currently there are still few who use it. Some things that can be used by using the internet are to control or monitor systems remotely. Internet of thing (IoT) is a concept that aims to expand the benefits of internet connectivity that is connected continuously. Internet of things (IoT) can be used in buildings to control electronic equipment. To take advantage of the functions of the internet, this research will design an application that can control the robot using an internet connection. The application is made so that the robot can move from one place to another. The design of this IoT application uses android studio and the robot uses a Nodemcu8266 microcontroller so that the robot can be connected to the internet.
Keywords: IoT, MQTT, Robot Navigation, Nodemcu 8266, Controller Applications.
ABSTRAK
Internet sekarang sudah menjadi hal yang lumrah kita temui akan tetapi saat ini masih sedikit yang memanfaatkan nya, Beberapa hal yang dapat di manfaatkan mengunakan internet adalah untuk mengontrol atau memonitoring sistem dari jarak jauh. Internet of thing (IoT) merupakan suatu konsep yang bertujuan untuk memperluas manfaat dari konektivitas internet yang tersambung secara terus menerus. Internet of thing (IoT) bisa dimanfaatkan pada gedung untuk mengendalikan peralatan elektronik [1]. Untuk memanfaatkan fungsi dari internet tersebut pada penilitian ini akan dirancang sebuah aplikasi yang dapat mengontrol robot dengan mengunakan koneksi internet. Aplikasi dibuat agar robot dapat berpindah dari suatu tempat ke tempat yang lain. Perancangan aplikasi IoT ini menggunakan aplikaksi android studio dan pada robot mengunakan mikrokontroler Nodemcu8266 sehingga robot bisa terkoneksi dengan internet.
Kata Kunci: IoT, android studio, Navigasi Robot, Nodemcu8266, Aplikasi Pengendali
56 PENDAHULUAN
Internet sekarang sudah menjadi hal yang lumrah kita temui akan tetapi saat ini masih sedikit yang memanfaatkan nya, Beberapa hal yang dapat di manfaatkan mengunakan internet adalah untuk mengontrol atau memonitoring sistem dari jarak jauh.
Internet of thing (IoT) merupakan suatu konsep yang bertujuan memperluas manfaat dari konektivitas internet yang tersambung secara terus menerus.
Internet of thing (IoT) bisa dimanfaatkan pada gedung untuk mengendalikan peralatan elektronik.
Pada penelitian ini ditawarkan sebuah konsep pembuatan aplikasi untuk pemanfaatan internet sebagai pengontrol dan untuk memonitoring robot. Pembuatan aplikasi yang dapat mengontrol dan memonitoring sebuah robot sangat bermanfaat masa pandemi saat ini di karnakan semua orang harus menjaga jarak, Contohnya seperti di rumah sakit seorang pasien yang terkena covid-19 untuk mendapatkan perawatan dari seorang suster seperti memberikan obat obatan atau memberikan makanan harus di lakukan secara langsung dengan cara tersebut dapat suster sangat bersiko untuk penularan. Jika hal tersebut bisa dilakukan dengan hanya mengunakan sebuah robot maka resiko penularan dapat ditekan.
Beberapa penelitian yang telah melakukan penelitian tentang pengaplikasian IoT salah satunya pada penelitian yang dilakukan oleh Rohmat Indra Borman (2018) dalam laporan akhirnya yang berjudul “Implementasi Internet Of Things pada Aplikasi Monitoring Kereta Api dengan Geolocation Information System”.
Pembuatan aplikasi yang berfungsi untuk memonitoring posisi kereta api dengan memanfaatkan internet untuk pengiriman data.
Penelitian lainnya dilakukan oleh adrie sentosa (2016) dalam tugas akhirnya dengan judul “Rancang Bangun Kendali Jarak Jauh Robot Servis Berbasi Internet of Things” dimana pada
penelitian ini membahas kontrol dan monitoring sebuah robot mengunakan internet. Pada penelitian yang akan dibahas saat ini merupakan pengembangan dari penelitian diatas yaitu bagaimana merancang sebuah aplikasi yang dapat mengontrol dan juga memonitoring sebuah robot yang bertujuan untuk mengantikan peran seorang suster dalam melakukan perawatan pasien yang terinfeksi covid- 19.
Keuntungan dari penggunaan aplikasi ini adalah seorang pasien dapat di kontrol dari jarak jauh dengan mengunakan internet sebagai salah satu pemanfatan dari internet.
IOT (Internet of Things)
Internet of Things (IoT) adalah paradigma komunikasi terbaru yang dilengkapi dengan mikrokontroler, pemancar gelombang untuk komunikasi digital dan tumpukan protokol (protocol stack) yang cocok akan membuat mereka mampu saling berkomunikasi dengan satu sama lain dan dengan pengguna, sehingga menjadi bagian yang tak terpisahkan dari internet.
Protokol MQTT
Sebuah protokol yang berjalan diatas stack TCP/IP dan dirancang khusus untuk machine to machine yang tidak memiliki alamat khusus.
Broker pada MQTT berfungsi untuk menghandle data publish dan subscribe dari berbagai device, bisa diibaratkan sebagai server yang memiliki alamat IP khusus.
Gambar 1 Ilustrasi Protokol MQTT
Adafruit IO
Layanan cloud server yang
menyimpan dan kemudian mengambil
57
data tetapi dapat melakukan lebih dari itu. Kelebihan adafruit IO :
- Tampilkan data secara real-time, online.
- Jadikan proyek Anda terhubung ke internet: Kontrol motor, baca data dan sensor.
- Hubungkan proyek ke layanan web seperti Twitter, umpan RSS, layanan cuaca, dan aplikasi.
- Hubungkan proyek ke perangkat lain yang mendukung internet
Gambar 2 Dasbor Adafruit IO
MIT APP Inventor 2
Sistem berbasis web dimana aplikasi Android dapat digunakan tanpa perlu tahu bagaimana cara meng-code- nya. Sistem ini telah dihentikan oleh google tapi dirilis kembali oleh google sebagai proyek open-source dan saat ini dikelola oleh Massachusetts Institute of Technology (MIT). Dengan app inventor, pengguna bisa melakukan pemrograman komputer untuk menciptakan aplikasi perangkat lunak dengan sistem operasi berbasi android. App inventor ini berbasis visual block programming karena memungkinkan pengguna bisa menggunakan, melihat, menyusun dan men-drag and drops block yang merupakan simbol perintah dan fungsi event handler untuk menciptakan sebuah aplikasi yang bisa berjalan di sistem android.
Gambar 3 Halaman Designer MIT APP
Pada halaman ini kita dapat menambahkan tools yang akan kito gunakan di aplikasi kita seperti menambahkan tombol nemanbahkan label ataupun text box, Setelah selesai
menambahkan tools kita dapat membuat program untuk menentukan fungsi fungsi dari tools tersebut dengan membuka halaman blocks.
Gambar 4 Halaman Blocks MIT APP
Sensor Garis
Sensor garis biasa digunakan pada robot Line Follower, sensor garis dapat mendeteksi warna gelap atau warna terang [20]. Pada penelitian ini menggunakan Sensor TCRT5000. Sensor TCRT5000 merupakan sensor reflective yang dibuat dari infrared yang dijadikan sebagai pemancarnya dan potodiode sebagai penerima.
Gambar 5 Prinsip kerja Sensor Garis
Ilustrasi diatas adalah cara kerja photodioda sebagai sensor garis. Prinsip kerja Sensor garis mengunakan photodioda adalah memanfaatkan sifat cahaya yang akan dipantulkan jika mengenai benda berwarna terang dan akan diserap jika mengenai benda berwarna gelap.
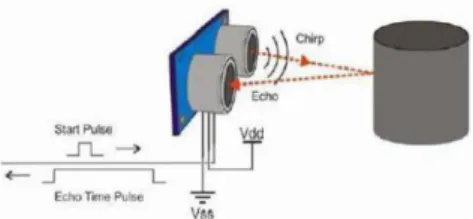
Sensor Ultrasonik
Pantulan Gelombang ultrasonik
terjadi bila ada objek tertentu dan
pantulan gelombang ultrasonik akan
diterima kembali oleh unit sensor
penerima. Selanjutnya unit sensor
penerima akan menyebabkan diafragma
penggetar akan bergerak dan efek
piezoelectric menghasilkan sebuah
tegangan bolak-balik dengan frekuensi
yang sama. Berikut gambar prinsip
kerja dari sensor ultrasonik :
58
Gambar 6 Prinsip Sensor Ultrasonik
Besar amplitudo pada sinyal elektrik yang dihasilkan sensor penerima tergantung dari jauh dekatnya sebuah objek yang akan dideteksi serta kualitas dari sensor pemancar dan sensor penerima. Proses sensoring yang dilakukan pada sensor ini menggunakan metode pantulan untuk menghitung jarak antara sensor dan objek sasaran.
Sensor Kompas
Sensor kompas digunakan sebagai penunjuk arah, arus dan medan magnet berhubungan langsung satu sama lain. Ketika arus mengalir dalam kawat (elektron mulai bergerak ke satu arah), medan magnet dibuat. Ide utama sensor kompas didasarkan pada hubungan ini. Arah medan magnet bumi mempengaruhi aliran elektron di sensor. Dengan mengukur perubahan arus tersebut, sensor akan dapat mendeteksi arah. Modul GY-271 menggunakan chip QMC5883L untuk mendeteksi medan magnet dan arahnya.
Protokol komunikasi modul ini adalah I2C dan Anda dapat menghubungkannya ke prosesor yang berbeda seperti papan Arduino menggunakan dua pin SCL dan SDA.
Gambar 7 Gambar Kompas GY-271
Sensor Warna
Sensor warna pada penelitian ini digunakan sebagai pendeteksi dan mengenal setiap ruangan yang telah diberi warna di masing-masing pintu masuk ruangan.
Gambar 8 Sensor Warna TCS3200
Nodemcu8266
Sebuah platform IoT yang bersifat opensource. secara default sebenarnya mengacu pada firmware yang digunakan dari pada perangkat keras development kit NodeMCU bisa dianalogikan sebagai board arduino-nya ESP8266.
Gambar 9 Nodemcu 8266
Arduinno Mega 2560
Arduino mega 2560 merupakan papan mikrokontroler berbasiskan atmega 2560. memiliki 54 pin digital i/O, dimana 15 pin dapat digunakan sebagai output PMW, 16 pin sebagai input analog, dan 14 pin sebagai UART (Port serial Hardware), selain itu arduino mega ini juga memiliki 16 MHz kristal osilator, tombol reset, header ICSP, koneksi USB dan jack power.
Untuk memulai mengaktifkan
perangkat tersebut cukup dengan
menghubungkannya ke komputer
melalui kabel USB atau power suplay
atau beterai.
59
Gambar 10 Arduino Mega 2560
Motor Dc
Motor DC planetary gear adalah motor DC yang memiliki torque yang besar karena memiliki sistem gear yang terdiri dari tiga elemen, yaitu : sun gear, carrier gear dan ring gear atau internal gear. Sehingga dengan kombinasi ketiga gear tadi menghasilkan torsi yang lebih besar Berikut gambar sistem kerja dari planetary gear yaitu sebagai berikut :
Gambar 11 Motor DC (PG 36 )
PG36 ( Planetary Gear 36) seperti gambar 2. 3 dengan spesifikasi torsi 10 kgfcm, kecepatan 600Rpm, memiliki rotary encoder dengan pulse 7ppr, dan suplai tegangan 12-24Vdc.
Driver Motor DC BTS7960
Pada driver motor DC ini dapat mengeluarkan arus hingga 43A, dengan memiliki fungsi PWM. Tegangan sumber DC yang dapat diberikan antara 5.5V- 27VDC, sedangkan tegangan input level antara 3.3V-5VDC, driver motor ini menggunakan rangkaian full H- bridge dengan IC BTS7960 dengan perlindungan saat terjadi panas dan arus berlebihan.
Gambar 12 Motor Driver
Driver motor ini menggunakan rangkaian full H-bridge dengan IC BTS7960 dengan perlindungan saat terjadi panas dan arus berlebihan.
LCD
Liquid Crystal Display merupakan alat elektronik yang berfungsi untuk menampilkan suatu data, baik karakter, huruf, angka maupun grafik. [12] LCD adalah salah satu jenis display elektronik yang bekerja dengan tidak menghasilkan cahaya tapi memantulkan cahaya yang ada di sekelilingnya. Material LCD adalah lapisan dari campuran organik antara lapisan kaca bening dengan elektrodatransparan indium oksida dalam bentuk tampilan seven- segment dan lapisan elektroda pada kaca belakang. Bentuk dan penjelasan mengenai LCD dapat dilihat pada gambar dibawah ini:
Gambar 13 LCD 16x4
METODE PENELITIAN
Pada penelitian ini disusun
berdasarkan tahapan untuk
mendapatkan hasil pengerjaan yang
maksimal. Adapun tahapan tersebut
dapat dibuat ke bentuk blok diagram.
60
Gambar 14 Blok Diagram Rancangan Penelitian
PENGEMBANGAN PERANGKAT KERAS
Perancangan keras pada penelitian ini di bagi menjadi 2 tahap yaitu tahap perancangan perangkat mekanik dan perangkat elektronik.
Berikut mekanik Garbage Robot yang dirancang terlihat pada Gambar 15
Gambar 15 Perancangan badan robot
Perancangan rangkaian elektronik merupakan pembuatan rangkaian, layout dan pencetakan PCB serta pengkabelan (wiring diagram).
Pembuatan rangkaian dan layout pada tugas akhir ini mengunakan aplikasi eagle dan fritzing. Berikut ini adalah perancangan skematik robot.
Gambar 16 Skema Rangkaian
PENGEMBANGAN PERANGKAT KERAS Pengembangan perangkat lunak mencakup tahap-tahap perancangan aplikasi. Perancangan adalah tahap terpenting dari seluruh proses pembuatan aplikasi. Perancangan lunak pada tugas akhir ini yaitu perancangan aplikasi dan cloud server.
Gambar 17 Perancangan aplikasi
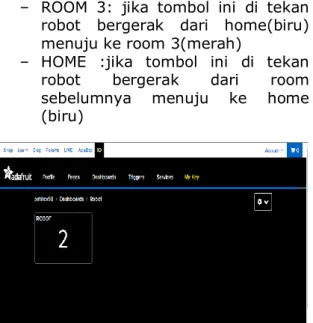
Pada perancangan pada aplikasi dibuat 4 tombol yang berfungsi sebagai pengendali pergerakan robot yaitu :
– ROOM 1: jika tombol ini di tekan robot bergerak dari home(biru) menuju ke room 2(hijau)
– ROOM 2: jika tombol ini di tekan
robot bergerak dari home(biru)
menuju ke room 2(orange)
61
– ROOM 3: jika tombol ini di tekan robot bergerak dari home(biru) menuju ke room 3(merah)
– HOME :jika tombol ini di tekan robot bergerak dari room sebelumnya menuju ke home (biru)
Gambar 18 Perancangan
Cloud Server
Pada sisi cloud server dibutuhkan penampungan data berfungsi untuk menbaca data dari aplikasi lalu nodeMCU 8266 akan menproses data tersebut, Adapun data data tersebesut adalah :
- Jika aplikasi menekan tombol room 1 maka data adalah 1
- Jika aplikasi menekan tombol room 2 maka data adalah 2
- Jika aplikasi menekan tombol room 3 maka data adalah 3
- Jika aplikasi menekan tombol room 1 maka data adalah 0
Cara kerja keseluruhan dari rancangan desain robot pembawa nampan obat yang akan dibuat dapat dilihat pada Blok Diagram sehingga keseluruhan blok diagram akan menghasilkan suatu sistem yang dapat difungsikan atau dapat bekerja. Berikut gambar memperlihatkan blok diagram sistem.
Gambar 19 Blok Diagram
Berikut ini penjelasan mengenai Gambar 19 blok diagram robot Garbage Robot (G-Bot) diatas :
a. Sensor Warna sebagai pendeteksi posisi robot berdasarkan warna ada.
b. Sensor Ultrasonik sebagai pendeteksi jarak dan halang rintang pada navigasi robot dan pendeteksi robot nampan sampai atau tidak sampai ke tujuan.
c. Sensor Kompas berfungsi untuk mengetahui arah dimana robot mengetahui arah utara, timur, barat dan selatan.
d. Sensor garis sebagai untuk navigasi robot.
e. Aplikasi (Android Studio) berfungsi sebagai GUI untuk user mengontrol robot.
f. Nodemcu untuk penerima dan pemeroses data yang dikirim user melalui aplikasi.
g. Arduino berfungsi sebagai pengontrol driver motor, menampilkan data sensor dan memproses data dari nodemcu untuk gerakan robot.
h. Driver motor sebagai pengendali dari gerakan robot.
i. Motor DC sebagai pengerak robot.
LCD I2C sebagai output untuk memonitoring data sensor.
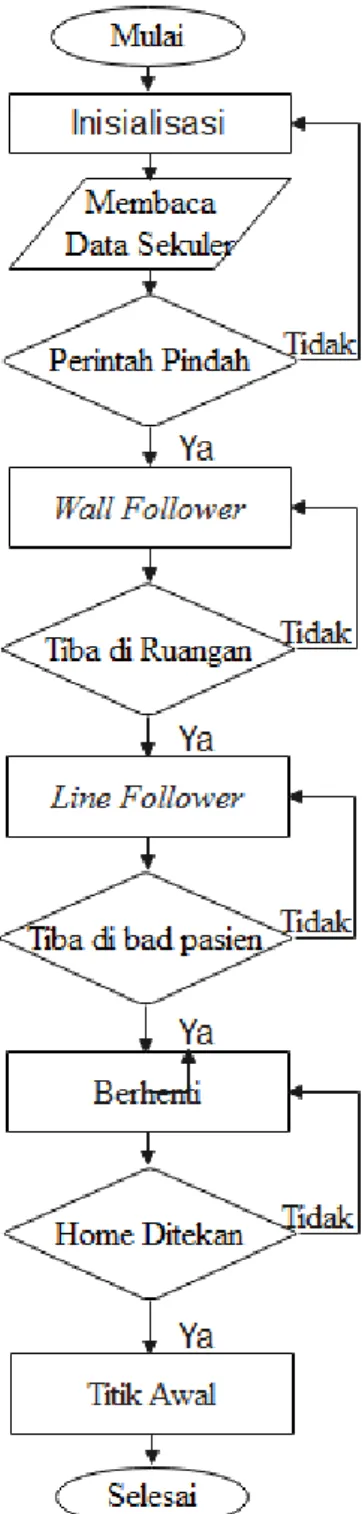
Dalam menentukan perancangan
penelitian, diperlukan sebuah flowcart,
Flowchart merupakan alur kerja dari
suatu sistem. Dengan adanya flowchart
maka dapat membantu kita memahami
alur kerja dari sebuah sistem. Flowchart
dari Sistem Alarm Pada Monitoring Infus
Berbasis Android dapat dilihat pada
gambar dibawah ini:
62
Gambar 20 Flowchart