BAB II
DASAR TEORI
Pada bab ini akan dibahas tentang metoda peakvue sebagai dasar pembuatan program untuk mikrokontroler dan teori mikrokontroler berikut fitur-fitur yang akan digunakan, filter digital lalu tinggi (high pass digital filter), amplifier diferensial, amplifier logaritmik, dan pendeteksi puncak nilai tegangan.
2.1 Teori Hertz dan Wave
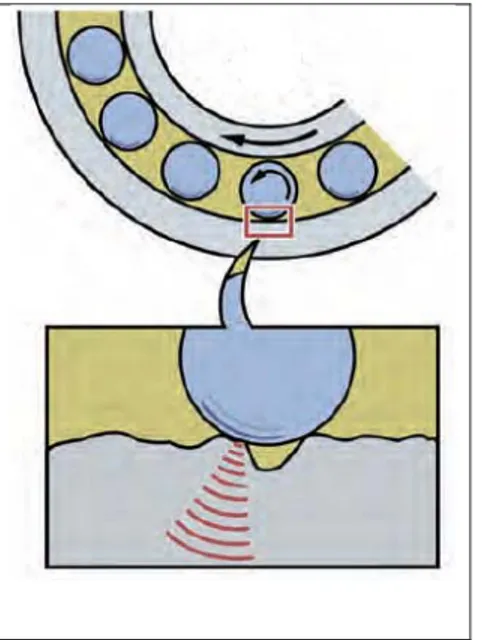
Perambatan gelombang (stress wave propagation) merupakan sebuah fenomena yang sering terjadi pada bantalan. Fenomena ini secara praktek timbul akibat beban atau kondisi berikut ini:
1. Beban impak
2. Beban lelah (fatigue crack) 3. Scuffing
4. Beban gesekan (abrasive wear)
Ilustrasi grafis penyebab terjadinya fenomena stress wave propagation pada bantalan bola diperlihatkan sebagaimana tampak dalam Gambar 2.1.
Pembahasan metoda perambatan gelombang lebih ditekankan pada aspek getaran yang timbul melalui kontak antar logam. Kontak antar logam menimbulkan energi tinggi yang mampu memindahkan sejumlah material secara tiba-tiba dalam durasi singkat.
Fenomena ini disebutkan dalam teori Hertz dan teori Wave. Pada teori Hertz diuraikan bahwa kontak antar logam dapat menimbulkan gelombang energi seperti ditunjukkan dalam Gambar 2.2.
Gambar 2.2 Besar impak pada pelat logam sebagai variasi laju dan dimensi [3].
Pada Gambar 2.2b diperlihatkan bahwa semakin kecil diameter bola yang menumbuk pelat maka waktu kontak bola dengan pelat akan semakin singkat. Sedangkan jika diperhatikan pada domain frekuensi sebagaimana tertera pada Gambar 2.2a, fenomena tersebut merupakan energi impak yang berkurang dalam rentang frekuensi yang cukup lebar. Penurunan energi dalam rentang frekuensi lebar ini menyebabkan kerusakan pada logam yang saling kontak.
Teori Hertz dengan penekanan pada waktu kontak antara bola penumbuk dan obyek uji lebih lanjut diperkuat dengan Teori Wave yang lebih menegaskan efek akibat perambatan gelombang tegangan. Efek ini digambarkan pada data domain frekuensi sebuah mesin yang berputar dengan kecepatan 3600 rpm dilengkapi bantalan bola berdiameter 0,125 inci sebagaimana tertera pada Gambar 2.3.
Gambar 2.3 Kandungan energi impak dan gesekan pada domain frekuensi [3].
Berdasarkan data domain frekuensi tersebut terlihat bahwa kandungan energi tinggi akibat beban impak dan gesek yang terjadi pada bantalan bola dengan diameter relatif kecil. Melalui ilustrasi Gambar 2.3 juga diketahui bahwa energi akibat gesekan relatif lebih besar dibandingkan dengan energi yang timbul akibat beban kejut.
Salah satu solusi untuk mencegah terjadinya kasus seperti pada ilustrasi sebelumnya adalah dengan melakukan perawatan prediktif yang bertujuan untuk memonitor komponen-komponen kritis khususnya pada komponen mesin berputar.
2.2 Peakvue
Peakvue merupakan sebuah nama metoda yang dipopulerkan oleh CSI corp., perusahaan pembuat data akuisisi digital CSI 2120. Metoda ini merupakan metoda yang digunakan untuk mendeteksi cacat bantalan bola lebih dini. Metoda ini melibatkan beberapa tahapan dan beberapa pertimbangan yang akan dibahas pada sub-bab berikut ini sebelum pengguna dapat memutuskan apakah kondisi bantalan masih aman beroperasi atau tidak.
2.2.1 Pemilihan dan Lokasi peletakan sensor
Metoda Peakvue merupakan salah satu metoda analisis perawatan prediktif berbasis pemantauan kondisi tingkat getaran. Berdasarkan kategori tersebut, terkait dengan masalah pemilihan sensor digunakan sensor accelerometer untuk mendeteksi gerak relatif antar logam. Pemilihan sensor accelerometer juga didasarkan atas kemampuan sensor untuk mendeteksi perpindahan dengan laju tinggi. Berikut ini merupakan ilustrasi perbandingan beberapa accelerometer dengan variasi rentang pengukuran dan cara pemasangan pada obyek uji.
Gambar 2.4 Variasi cara pemasangan accelerometer [3].
Pada Gambar 2.4 ditunjukkan bahwa cara pemasangan sensor akan memengaruhi kondisi rentang pengukuran yang diizinkan. Terlihat pada Gambar 2.4 bahwa cara pemasangan sensor dengan hand probe tidak dapat digunakan untuk mendeteksi getaran dengan frekuensi di atas 1000 Hz karena batas pengukuran yang diizinkan hanya berkisar 0-1000 Hz. Selain cara pemasangan, beberapa hal lain yang menjadi pertimbangan untuk pemakaian sensor yaitu mengenai lokasi peletakan dan nilai sensitivitas.
Kasus perambatan gelombang tegangan terjadi ke segala arah dengan nilai nominal yang melemah seiring dengan semakin jauhnya posisi dari sumber gelombang tegangan. Oleh karena itu, peletakan sensor disarankan sedekat mungkin dengan sumber gelombang tegangan. Pernyataan ini tidak berlaku mutlak mengingat variasi konfigurasi mesin menyebabkan variasi cara pemasangan sensor selama masih mengacu pada Gambar 2.4. Penerapan umum metoda peakvue biasanya menggunakan metoda dual rail magnet dengan catatan bahwa permukaan tempat sensor diletakkan harus bersih dan halus atau memiliki profil kurva. Jika permukaan tempat sensor tersebut diletakkan bersifat datar, biasanya digunakan cara pemasangan flat magnet. Pemasangan sensor pada penelitian ini dilakukan dengan cara adhesive mounting.
Nilai sensitivitas merupakan faktor konversi yang menunjukkan kemampuan sensor dalam mendeteksi perilaku obyek uji. Pengukuran dengan metoda peakvue biasanya menggunakan accelerometer dengan nilai sensitivitas sebesar 100 mV/G. Akan tetapi, penggunaan nilai sensitivitas tersebut perlu memerhatikan kondisi pengukuran, salah satunya jika nilai kecepatan putar mesin berkisar antara 5 rpm -10 rpm maka penggunaan sensor dengan sensitivitas 500 mV/G atau 1000 mV/G masih diizinkan. Jika nilai
kecepatan putar mesin berkisar antara 600.000 rpm – 1.200.000 rpm, maka sensor accelerometer yang digunakan harus memiliki nilai sensitivitas 10 mV/G.
2.2.2 Tahapan metoda peakvue
Sinyal getaran analog biasanya mengandung komponen getaran kondisi umum, seperti sinyal akibat kondisi unbalance, misalignment dan komponen getaran akibat perambatan gelombang tegangan. Hal yang umum diterapkan pada proses pengolahan sinyal getaran yaitu dengan melewatkan sinyal pada filter lalu rendah kemudian dilakukan proses pencuplikan menggunakan perangkat akuisisi data hingga hasil ditampilkan dalam domain frekuensi dengan bantuan algoritma Fast Fourier Transform. Hasil olahan data yang ditampilkan dalam domain frekuensi merupakan hasil diagnosis yang mampu menunjukkan kondisi getaran mesin yang terjadi. Namun, metoda tersebut tidak dapat diterapkan pada komponen getaran akibat gelombang tegangan.
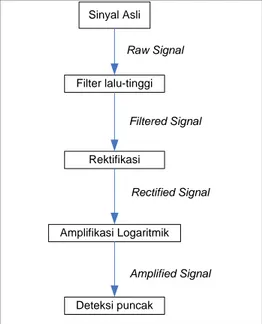
Berikut ini merupakan tahapan pengolahan sinyal akibat perambatan gelombang tegangan dengan metoda peakvue seperti digambarkan dalam diagram alir Gambar 2.5.
Filter lalu-tinggi Rektifikasi Amplifikasi Logaritmik Deteksi puncak Filtered Signal Rectified Signal Amplified Signal Sinyal Asli Raw Signal
Gambar 2.5 Diagram alir metoda peakvue
Salah satu keunikan dalam metoda ini adalah hasil analisis utama diperoleh pada tampilan domain waktu. Tampilan data dalam domain frekuensi pada metoda ini hanya digunakan untuk validasi ketika pengguna ingin mencari sumber penyebab terjadinya perambatan gelombang tegangan dengan indikasi-indikasi seperti frekuensi cacat alur dalam (BPFI), frekuensi cacat alur luar (BPFO), frekuensi cacat bola (BSF), atau cacat
dasar (FTF) pada bantalan bola. Hasil puncak yang didapat melalui proses dalam diagram alir di atas akan dianalisis pada tabel berikut ini sebagai panduan kondisi “rawan” pada bantalan bola dalam domain waktu.
Tabel 2.1 Panduan kondisi tingkat getaran “rawan” dalam domain waktu [log G].
Rolling Element Bearing Faults Component
Inner Race, Cage, Rolling Element Fault Outer Race RPM
0 - 900 3G 6G
9001 - 4000 3G 6G
Jika nilai hasil perhitungan metoda peakvue mencapai salah satu kondisi di atas pada nilai kecepatan putar tertentu maka kondisi bantalan bola tersebut dianggap rawan. Namun batas lain yang juga dijadikan sebagai acuan yaitu sebesar dua kali nilai batas dalam Tabel 2.1 merupakan kondisi “bahaya” di mana bantalan sudah tidak diizinkan untuk beroperasi.
Berikut ini merupakan tabel yang menjadi rekomendasi pemilihan cut-off frequency penggunaan filter lalu tinggi pada metoda peakvue.
Tabel 2.2 Rekomendasi nilai frekuensi potong filter lalu tinggi. RPM High Pass Filter [Hz]
0-700 500 701-1500 1000
Namun, beberapa pertimbangan tambahan perlu diperhatikan yaitu:
a. Nilai Fmax tidak boleh melebihi nilai frekuensi potong filter lalu-tinggi yang digunakan. (Nilai Fmax maksimum adalah sama dengan nilai frekuensi potong filter lalu-tinggi). b. Gunakan satuan sensor yang bersesuaian (dalam hal ini gunakan satuan percepatan
dalam ‘G’).
c. Permukaan tempat peletakkan sensor harus bebas dari cat atau pengotor lainnya.
d. Jangan menggunakan cara pemasangan dual-rail magnet ketika menggunakan filter lalu tinggi di atas 2000 Hz karena akan menghilangkan komponen getaran perambatan gelombang.
e. Tambahkan silicone, wax, atau grease antara magnet (peletakkan sensor dual-rail magnet) dan permukaan jika hendak menggunakan filter lalu-tinggi 5000 Hz.
2.3 Mikrokontroler
Mikrokontroler adalah sebuah perangkat elektronik yang mampu mengendalikan besaran elektrik dan melakukan operasi aritmatika dalam waktu yang sangat singkat. Saat ini, cukup banyak jenis mikrokontroler yang tersedia di pasaran, diantaranya adalah: AVR, PIC, 8051, Zilog 80, dan lain-lain. Namun, pada tugas sarjana ini hanya akan dibahas mengenai mikrokontroler AVR. Berikut ini merupakan ilustrasi yang menunjukkan tahapan proses kerja mikrokontroler.
Gambar 2.6 Tahapan proses kerja mikrokontroler [4].
Proses pemrograman dimulai dengan menuliskan program dengan bahasa High Level yang mudah dimengerti manusia pada sebuah compiler. Kemudian program tersebut diterjemahkan menjadi bahasa Assembly dan bahasa mesin oleh compiler. Hasil terjemahan tersebut berupa manipulasi register dan perubahan kondisi nilai tegangan hingga mikrokontroler mampu menjalankan instruksi sesuai program yang dituliskan.
2.3.1 Mikrokontroler ATMEGA32
ATMEGA32 merupakan salah satu varian mikrokontroler AVR dengan arsitektur Harvard yang memisahkan bagian memori program dan memori data. Keunggulan dari mikrokontroler AVR ini adalah kemampuannya dalam menyelesaikan 1instruksi per 1 sikus clock, sehingga lebih efisien dibandingkan mikrokontroler jenis lainnya. Berikut ini merupakan spesifikasi dari ATMEGA32:
♣ merupakan CPU 8 bit.
♣ memiliki kecepatan hingga 16 juta instruksi per detik pada frekuensi kristal eksternal 16 MHz.
♣ memiliki memori flash untuk menyimpan program operasi sebesar 32 kByte yang bersifat mampu tulis/hapus sebanyak 10.000 kali.
♣ memiliki RAM internal sebesar 2 kByte.
♣ memiliki EEPROM internal untuk menyimpan data secara permanen sebesar 1 kByte yang bersifat mampu tulis/hapus sebanyak 10.000 kali.
♣ memiliki antamuka SPI untuk pemrograman.
♣ memiliki komparator analog.
♣ memiliki watchdog timer yang dapat diprogram dengan osilator internal di dalam chip.
♣ memiliki port serial yang dapat deprogram.
♣ memiliki antarmuka serial SPI dan I2C sebagai master maupun slave.
♣ memiliki real-time counter dengan osilator terpisah.
♣ memiliki 4 buah PWM dan timer/counter 8 bit dengan pembagi terpisah.
♣ memiliki timer/counter 16 bit dengan pembagi terpisah.
♣ memiliki 8 kanal ADC dengan resolusi 10 bit.
♣ memiliki 32 jalur masukan/keluaran multiguna.
ATMEGA32 diproduksi dalam kemasan PDIP-40, TQFP-44, dan QFN-44. Namun, pada tugas sarjana ini digunakan jenis 40 pin PDIP seperti terlihat pada Gambar 2.7 berikut dengan alasan kemudahan dalam simulasi.
2.3.2 Analog to Digital Converter (ADC) ATMEGA32
Salah satu fitur ATMEGA32 yaitu mampu mengonversi nilai tegangan analog menjadi digital melalui metoda 10-bit successive approximation. ADC dihubungkan pada 8 buah kanal analog multiplexer yang diwakili dengan register ADMUX. Register ini juga berfungsi menentukan apakah sinyal tegangan analog yang masuk berupa sinyal tunggal atau sinyal diferensial dengan penguatan tertentu. Berdasarkan pengaturan register ADMUX, sinyal akan mulai dikonversi dengan ketelitian 10 bit sebanyak 15.000 data dalam satu detik. Melalui teorema Nyquist yang menyatakan tentang syarat pencuplikan sinyal, dapat disimpulkan bahwa sinyal tegangan analog yang berguna yaitu sebesar 7.500 data pertama dengan kemampuan cuplik ADC ATMEGA32 sebesar 15.000 data per detik.
Pada saat sebelum proses konversi dimulai, sinyal dilewatkan pada sample and hold comparator yang berguna untuk menahan kondisi sinyal analog supaya nilai tersebut tidak berubah selama proses konversi berlangsung. Hasil proses konversi kemudian akan disimpan dalam register ADCH dan ADCL dalam bentuk nilai diskrit dengan kisaran 0 - 1024 untuk sinyal tunggal atau -512 - 511 untuk sinyal diferensial dengan atau tanpa penguatan. Berikut ini ditampilkan ilustrasi yang menggambarkan proses kerja ADC ATMEGA32.
2.3.3 Timer/Counter0 dan Timer/Counter1 ATMEGA32
Timer dan counter merupakan dua buah fitur yang selalu bekerja sama dalam mengendalikan besaran elektrik yang ingin diatur. Pada ATMEGA32, terdapat 3 buah timer/counter dengan perbedaan spesifik pada nilai ketelitian yaitu Timer/Counter0 memiliki ketelitian sebesar 8 bit, sedangkan Timer/Counter1 dan Timer/Counter2 sebesar 16 bit. Salah satu fitur tambahan pada Timer/Counter2 memiliki fasilitas PWM yang sering digunakan dalam pengaturan motor listrik. Namun, pada prinsipnya cara kerja fitur ini sama untuk ketiga buah timer/counter serupa. Ketika fitur ini diaktifkan, mikrokontroler akan memulai pencacahan dimulai dari 0-255 untuk ketelitian 8 bit atau 0-65535 untuk ketelitian 16 bit. Namun, pencacahan dapat dimulai dari angka berapa pun selama tidak melebihi angka maksimum yang bisa dihitung dengan mengisi nilai pada register TCNT0 atau TCNT1. ketika nilai pencacahan sudah mencapai maksimum, maka, maka register TOV0 atau TOV1 akan aktif sebagai tanda bahwa satu kali proses pencacahan telah dilakukan dan siap melakukan instruksi yang terdapat pada sub-routine timer_interrupt0 atau timer_interrupt1. Proses ini akan terus berulang sehingga memungkinkan mikrokontroler untuk melakukan kegiatan yang bersifat periodik dengan waktu yang dapat diatur. Berikut ini ditampilkan ilustrasi yang menggambarkan kerja Timer/Counter0 ATMEGA32.
2.3.4 Fasilitas Keluaran
Supaya mikrokontroler mampu menunjukkan kerjanya, maka pada tugas sarjana ini digunakan fitur komunikasi USART yang berfungsi sebagai media untuk menunjukkan hasil perhitungan yang dilakukan mikrokontroler.
2.4 Amplifier Diferensial
Salah satu kendala umum yang sering dihadapi dalam proses pengolahan sinyal adalah kesalahan perhitungan akibat kesalahan sinyal masukan. Kesalahan sinyal masukan dapat disebabkan karena banyaknya gangguan yang masuk (noise) atau karena sinyal masukan terlalu lemah. Kendala ini dapat diselesaikan dengan melewatkan sinyal melalui amplifier diferensial sebelum sinyal diolah lebih lanjut. Kelebihan utama amplifier diferensial adalah mampu mengeliminasi gangguan yang masuk bersamaan dengan sinyal, selain menguatkan sinyal masukan sebelum dianalisis lebih lanjut. Berikut ini merupakan ilustrasi amplifier diferensial.
2 out 2 1 1 R V = (V -V ) R
Gambar 2.10 Rangkaian umum amplifier diferensial [6].
Sebenarnya, mikrokontroler ATMEGA32 sudah dilengkapi amplifier diferensial dengan beberapa nilai penguatan tertentu. Namun, fitur ini tidak tersedia pada kemasan PDIP (Plastic Dual Inline Package) yang digunakan pada tugas sarjana ini sehingga penerapan menggunakan amplifier diferensial dilakukan dengan perangkat keras terpisah yang digunakan sebelum sinyal masukan dianalisis lebih lanjut oleh mikrokontroler.
2.5 Filter Digital
Secara umum, filter merupakan elemen pengondisi sinyal dengan melemahkan komponen sinyal yang tidak ingin diinginkan. Berdasarkan respon yang terjadi, filter dapat terbagi dua yaitu IIR Filter (Infinite Impulse Response) yang bersifat rekursif atau FIR Filter (Finite Impulse Response) yang bersifat non-rekursif. Perbedaan signifikan kedua
filter ini terletak efek kestabilan yang dimiliki oleh filter. Filter FIR selalu stabil karena tidak memiliki elemen penyebab osilasi, sedangkan filter IIR tidak selalu stabil mengingat adanya komponen penyebab osilasi. Efek kestabilan, khususnya pada filter IIR juga ditentukan dari jumlah orde yang menyatakan jumlah elemen pelemahan.
Berdasarkan jangkauan sinyal yang dapat diloloskan, filter terbagi dalam empat jenis , yaitu filter lalu rendah (low pass filter), filter lalu tinggi (high pass filter), filter lalu pita (band pass filter), dan filter takik (band stop filter). Pada tugas sarjana ini, filter yang akan digunakan adalah filter FIR yang umum diimplementasikan pada perangkat keras dengan jenis lalu tinggi sesuai dengan rekomendasi metoda peakvue. Berikut ini merupakan perumusan umum filter FIR.
N k k=0
y(n) =
∑
b ⋅x(n-k)N = orde filter
bk = koefisien filter FIR x(n-k) = sinyal masukan
y(n) = sinyal keluaran setelah filter
Permasalahan umum dalam perancangan filter adalah menemukan koefisien filter sehingga filter mampu memotong sinyal pada nilai frekuensi tertentu. Namun, masalah ini salah satunya dapat diatasi dengan menggunakan perangkat lunak MATLAB sehingga dengan menentukan orde, nilai frekuensi potong tertentu, dan jenis filter yang digunakan maka nilai-nilai koefisien tersebut dapat langsung diperoleh.
2.6 Amplifier Logaritmik
Amplifier adalah elemen pengondisi yang bertujuan untuk menguatkan sinyal dan biasa dilakukan pada proses pengolahan sinyal. Kadang-kadang, sinyal hasil keluaran sensor tidak dapat langsung diolah disebabkan oleh beberapa alasan, diantaranya adalah efek non-linier. Jika sinyal tersebut langsung diolah maka akan terjadi kesalahan pembacaan kondisi yang terjadi mengingat pembuatan instrumen pada umumnya mengasumsikan bahwa sinyal masukan bersifat linier sehingga menghasilkan nilai yang linier juga.
Salah satu kelebihan amplifier logaritmik yaitu mampu mengondisikan sinyal masukan non-linier dan menghasilkan sinyal keluaran linier. Berikut ini merupakan rangkaian umum amplifier logaritmik.
in out out in V V = - C ln ( ) R V = K ln V ⋅ ⋅
Gambar 2.11 Rangkaian umum Amplifier Logaritmik [6].
Berdasarkan perumusan di atas, terlihat bahwa sinyal tegangan keluaran merupakan hasil perkalian logaritma natural sinyal masukan dengan suatu koefisien pengali. Koefisien pengali ini dipilih berdasarkan iterasi untuk mendekatkan nilai hasil pengukuran metoda peakvue dengan kondisi acuan.
2.7 Pendeteksi Tegangan Puncak
Berdasarkan penjabaran metoda peakvue pada Gambar 2.5, proses terakhir yang dilakukan yaitu proses deteksi puncak yang terjadi sepanjang area pengukuran. Nilai puncak inilah yang menjadi indikator kelayakan bantalan untuk beroperasi atau tidak berdasarkan panduan Tabel 2.2. Proses ini secara analog dapat diterapkan dengan rangkaian berikut.
Gambar 2.12 Rangkaian pendeteksi tegangan puncak.
Namun, pada tugas sarjana ini penerapan elemen pendeteksi tegangan puncak akan dilakukan dengan menuliskan program yang memiliki hasil serupa dengan ilustrasi Gambar 2.12.
![Gambar 2.2 Besar impak pada pelat logam sebagai variasi laju dan dimensi [3].](https://thumb-ap.123doks.com/thumbv2/123dok/2124286.2156318/2.918.152.778.324.518/gambar-besar-impak-pelat-logam-variasi-laju-dimensi.webp)
![Gambar 2.3 Kandungan energi impak dan gesekan pada domain frekuensi [3].](https://thumb-ap.123doks.com/thumbv2/123dok/2124286.2156318/3.918.285.656.119.331/gambar-kandungan-energi-impak-gesekan-pada-domain-frekuensi.webp)
![Gambar 2.4 Variasi cara pemasangan accelerometer [3].](https://thumb-ap.123doks.com/thumbv2/123dok/2124286.2156318/4.918.302.640.116.352/gambar-variasi-cara-pemasangan-accelerometer.webp)
![Tabel 2.1 Panduan kondisi tingkat getaran “rawan” dalam domain waktu [log G].](https://thumb-ap.123doks.com/thumbv2/123dok/2124286.2156318/6.918.213.733.277.375/tabel-panduan-kondisi-tingkat-getaran-rawan-dalam-domain.webp)
![Gambar 2.6 Tahapan proses kerja mikrokontroler [4].](https://thumb-ap.123doks.com/thumbv2/123dok/2124286.2156318/7.918.180.759.345.595/gambar-tahapan-proses-kerja-mikrokontroler.webp)
![Gambar 2.7 Susunan pin ATMEGA32 kemasan PDIP [5].](https://thumb-ap.123doks.com/thumbv2/123dok/2124286.2156318/8.918.312.626.720.1000/gambar-susunan-pin-atmega-kemasan-pdip.webp)
![Gambar 2.8 Ilustrasi kerja ADC ATMEGA32 [5].](https://thumb-ap.123doks.com/thumbv2/123dok/2124286.2156318/9.918.227.708.611.1031/gambar-ilustrasi-kerja-adc-atmega.webp)
![Gambar 2.9 Ilustrasi kerja Timer/Counter0 ATMEGA32 [5].](https://thumb-ap.123doks.com/thumbv2/123dok/2124286.2156318/10.918.213.726.634.1022/gambar-ilustrasi-kerja-timer-counter-atmega.webp)
