PENGATURAN TEMPERATUR PADA HEAT EXCHANGER DENGAN MENGGUNAKAN NEURO-FUZZY GENERALIZED
Teks penuh
Gambar



Dokumen terkait
Gambar 13 Respon Plant dengan Kontrol PID – JST Diberi Penurunan Set Point 10% Pada hasil pengujian dengan gangguan, diperoleh bahwa temperatur dijaga sesuai dengan. set point
Pada penelitian ini penulis hanya menggunakan metode jaringan saraf tiruan prediktif sehingga output plant hanya mampu beradaptasi dan error yang terjadi mencapai
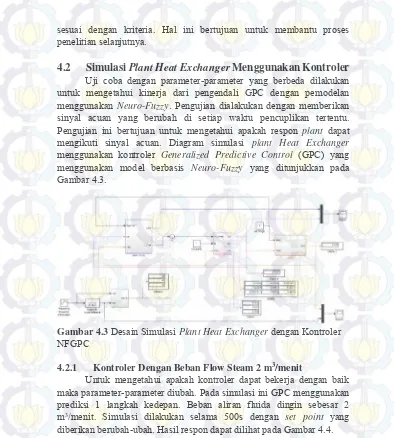
Dalam skematik diagram, sistem refrigerasi kompresi uap dengan sub cooling diperlihatkan pada Gambar 1, dalam sistem ini, cairan temperatur tinggi keluar dari kondensor
Pada gambar 4 adalah putaran motor saat start pada saat beban nol dengan menggunakan kontrol sliding mode, gambar 4 adalah fluk stator pada kondisi tanpa
Kendali pendaratan di tempat bergerak menggunakan neuro fuzzy pada simulasi quadcopter mampu landing dalam waktu 10 detik dari awal ketinggian 4 meterI. Pada implementasi
Pada Gambar 19 menunjukkan respon sistem kendali suhu dengan gangguan kontinyu pada referensi 34 °C, gangguan diberikan dengan memberikan aliran inlet pada waktu 850
Pada Gambar 19 menunjukkan respon sistem kendali suhu dengan gangguan kontinyu pada referensi 34 °C, gangguan diberikan dengan memberikan aliran inlet pada waktu
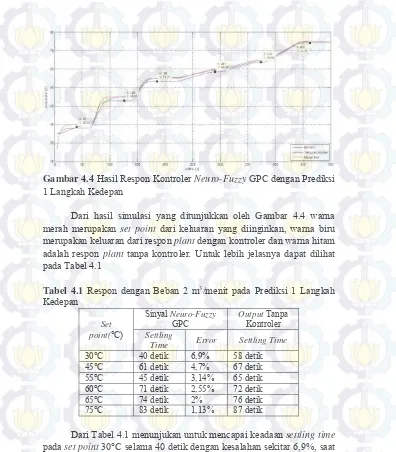
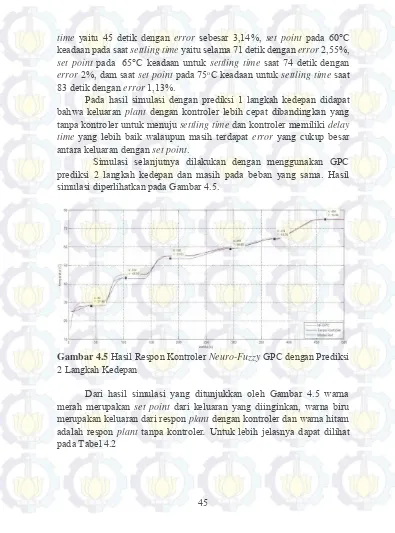
Pada simulasi uji perbandingan PID dan neuro fuzzy menunjukkan respon sistem neuro fuzzy pada detik ke 8, settling time dan set point terkendali pada keluaran
