PERANCANGAN KONTROLER PI-FUZZY UNTUK SISTEM PENGENDALIAN LEVEL FLUIDA PADA COUPLED TANK
Akbar Hariputra
S1 Teknik Elektro, Fakultas Teknik, Universitas Negeri Surabaya e-mail :[email protected]
Puput Wanarti
S1 Teknik Elektro, Fakultas Teknik, Universitas Negeri Surabaya e-mail : [email protected]
Abstrak
Coupled Tank adalah alat yang sengaja di rancang untuk pengajaran laboratorium dari teori sistem kendali yang merupakan contoh dari system suatu pabrik.Coupled Tanktersusun dari dua buah tangki yang dihubungkan oleh sebuah pipa atau lubang saluran. Sistem Coupled Tank dikonfigurasi sebagai Sistem TITO melalui manipulasi pompa input dan sectional daerah valve.Tujuan penelitian ini adalah membentuk dan menelusuri penurunan model matematis sistem untuk plant coupled tank , membuat rancangan untuk pengendalian level fluida dengan membandingkan 2 jenis kontroler yaitu PI dan Fuzzy melalui software MATLAB dan untuk mengetahui respon dinamik dari hasil perancangan. Hasil Penelitian dengan membandingan 2 jenis kontroler menunjukkan bahwa kontroler PIlebih cepat mencapai nilai steady state dibandingkan dengan kontroler Fuzzy.dengan nilaitd = 1,24 s, tr = 18,04 s, ts = 57,1 s.
Kata Kunci :Coupled Tank, Kontroler PI, Kontroler Fuzzy, Kontroler PI- Fuzzy, td,ts,tr.
Abstract
Coupled Tank is a tool that is purposely designed for laboratory teaching which comes from the theory of control system which is a sample of a factory system. Coupled Tank is composed of two tanks which are connected by pipe or drain. The Coupled Tank system is configured as TITO system through the manipulation of input pump and valve sectional area. The purpose of this study is to compose and to examine the reduction of the model of mathematical system to plant coupled system, indeed to make program for controlling the level of fluid by comparing 2 types of controllers; they are PI dan Fuzzy through MATLAB software, and to ascertain dynamic response from the output of the program. The results of comparing 2 types of controllers showed PI controller was more quickly to reach the value of steady state which is compared with Fuzzy controller, which showed td = 1,24 s, tr = 18,04 s, ts = 57,1 s.
Keywords: Coupled Tank, PI controller, Fuzzy Controller, PI- Fuzzy Controller, td, ts, tr.
PENDAHULUAN
Dalam proses industri salah satunya adalah pengaturan level suatu cairan. Pengaturan level digunakan untuk menjaga titik set level terhadap nilai yang diberikan sehingga mampu menerima nilai-nilai set point secara dinamis.fluida dalam sebuah tangki dan terkadang tangki tersebut dihubungkan dengan tangki lainnya yang disebut sebagai coupled tanks. Sistem coupled tanks dapat diaplikasikan untuk pengaturan leveldi mana instrumen ukur berada pada tangki yang berbeda. Proses yang diatur merupakan level kedua tangki, sedangkan instrumen ukur berada di tangki pertama, sehingga saat maintenance tidak mengganggu proses yang berlangsung. Pengaturan level tangki dapat diketahui dengan sensor yang berada di kedua tangki. pada sistem coupled tanks dapat dilakukan dengan menurunkan model level tangki kedua terhadap level tangki pertama. Kendala dalam pengaturan level pada coupled tanks adalah mempertahankan respon pada nilai steady state. Selain itu, gangguan - gangguan yang terjadi pada aliran air yang menyuplai tangki membuat respon tidak stabil (Arjin Numsomran ,2007).
Pengaturan level coupled tanks pada penerapannya memiliki karakter berupa respon yang lambat karena adanya gangguan laju flow yang menyuplai tangki dan pengendaliannya berhubungan langsung dengan kondisi plant saat itu.Atau dapat dikatakan parameter sistemnya berubah tergantung pada kondisi aktual plant. Karena sifatnya, pengaturan level cairan pada coupled tanks dapat dimasukan dalam kasus non-linear (Onur Karasakal,2003). Oleh karena itu untuk menghasilkan performa sistem yang bagus diperlukan strategi kontrol yang dapat beradapatasi terhadap perubahan kondisi plant.Sehingga diperlukan metode pengaturan yang tepat.
PI-Fuzzy controller merupakan suatu metode pengontrolan modern gabungan dari algoritma PI dan fuzzy, yang menawarkan keunggulan-keunggulan dibandingkan dengan metode pengontrolan konvensional.Parameter–parameter PI yang berfungsi untuk menentukan sifat dari respon sistem, ditentukan oleh keluaran dari algoritma fuzzy.
Dengan latar belakang permasalahan tersebut diambil penelitian dengan judul Perancangan Kontroler
Pi-Fuzzy Untuk Sistem Pengendalian Level Fluida Pada Coupled Tank.
KAJIAN PUSTAKA
Coupled Tank
Coupled Tank adalah alat yang sengaja di rancang untuk pengajaran laboratorium dari teori system kendali yang merupakan contoh dari system suatu pabrik.Coupled Tank tersusun dari dua buah tangki yang dihubungkan oleh sebuah pipa atau lubang saluran.Level cairan pada tangki pertama ditunjukkan sebagai H1 dan H2 adalah level tangki kedua. Bila input kontrol adalah flow Q1, maka variable yang akan dikontrol adalah kedua level H1 dan H2, dengan disturbance yang disebabkan oleh variasi flow pada valve A, valve B. Disini akan timbul suatu sistem dengan dua tangki saling berinteraksi (Elke Laubwald,1998).
Sistem Coupled Tank dapat dikonfigurasi sebagai sistem SISO atau sebagai Sistem TITO melalui manipulasi pompa input dan sectional daerah valve (Muhammad Sadli,2014). Untuk memastikan cara kerja Coupled Tank yang baik, maka perlu terlebih dahulu untuk memahami karakteristik-karakteristik sistem dinamik. Pemahaman yang baik akan sangat mempengaruhi perancangan sistem kontrol yang efektif. konsep dasar pemodelan sistem coupled tank adalah gabungan dari dua teori yaitu keseimbangan massa dan hukum bernoulli.
Dengan demikian deskripsi penurunan sistem untuk menjelaskan sifat sistem dinamik dari sistem Coupled Tank, bentuk fisik coupled tank dapat di lihat pada Gambar 1.
Gambar 1.Bentuk Fisik Coupled Tank
Keseimbangan Massa
Satuan umum adalah kg/s, jika diasumsikan tanpa reaksi ekspresi dasar keseimbangan massa untuk sistem (contohnya: tangki) dapat ditulis sebagai berikut :
Laju aliran massa yang masuk – laju aliran massa yang keluar = laju perubahan massa dalam system
……...………...…..(1)
Dimana:
= debit aliran liquidyang masuk ke dalam tangki (m3/s)
= debit aliran liquidyang keluar ke dalam tangki (m3/s) = massa jenis liquid yang masuk ke dalam tangki (kg/m3)
= volume liquid dalam tangka (m3) = massa jenis liquid konstan (kg/m3)
Pada persamaan sistem liquid (1) biasanya bisa disederhanakan dengan membuat asumsi bahwa massa jenis liquid adalah konstan. Selain itu karena V=Ah maka,
…………...………..….(2) Dimana:
= luas area tangki (m3 ) = tinggi tangki (m) Hukum Bernoulli
Hukum ini diterapkan pada zat cair yang mengalir dengan kecepatan berbeda dalam suatu pipa.
Teorema Torriceli
Salah satu penggunaan persamaan Bernoulli adalah menghitung kecepatan zat cair yang keluar dari dasar sebuah wadah. dapat di lihat pada Gambar 2.
Gambar 2. Contoh Teorema Torricelli
Kita terapkan persamaan Bernoulli pada titik 1 (permukaan wadah) dan titik 2 (permukaan lubang). Karena diameter kran/lubang pada dasar wadah jauh lebih kecil dari diameter wadah, maka kecepatan zat cair di permukaan wadah dianggap nol (v1 = 0). Permukaan wadah dan permukaan lubang/kran terbuka sehingga tekanannya sama dengan tekanan atmosfir (P1 = P2). Dengan demikian, persamaan Bernoulli untuk kasus ini adalah :
⁄ ⁄ ...(3) ⁄ ………...…...(4) Jika kita ingin menghitung kecepatan aliran zat cair pada lubang di dasar wadah, maka persamaan ini menjadi:
⁄ …………..…….…….…...(5)
Massa jenis zat cair sama sehingga kita hilangkan : ⁄ ………...…….……...(6) ⁄ ………...(7) ………...(8) √ …………...……….…..….(9) √ ………...………...…...(10) METODE PENELITIAN Identifikasi Plant Tabel 1. Nilai parameter plant Tabel 2. Titik kerja dari plant Pemodelan Coupled Tank Persamaan plant dapat diperoleh dari persamaan kesetimbangan massa dan hukum Bernoulli (Chatcaval Pornpatkul,2009). Persamaan dapat dicari pada Gambar 3 dan Gambar 4. Gambar 3. Sistem Coupled Tank Gambar 4.Perancangan Coupled Tank Dari Gambar 3 dan Gambar 4 didapat kan persamaan sebagai berikut: …...…....(11) …...(12) √ √ √ ...(13) √ √ √ ...(14) √ √ √ ….….(15)
Dengan menggunakan nilai dari persamaan (13) sampai (15) ke dalam persamaan (11) dan (12) maka di peroleh persamaan nonlinear yang menggambarkan dinamika multi-input dan multi-output sistem berasal : √ √ ...(16)
√ √ …...…..(17)
Model linierisasi Two Input-Two Output (TITO). √ √ ...(18)
√ √ ………...(19)
Dinamika plant ini dapat kita modelkan dengan persamaan diferensial berikut : (Tianchai Suksri,2007). √ ...(20)
√ ...(21)
√ | ̅̅̅̅ ̅̅̅̅|[ ]………...…….(22)
Dari Persamaan 20,21,22 dapat di modelkan sebagai berikut : √ √ | ̅̅̅̅ ̅̅̅̅|[ ]………...(23) √ √ | ̅̅̅̅ ̅̅̅̅|[ ]……….……...(24)
Persamaan 23,24 ini dapat ditransformasi ke dalam Matriks Transfer Function berikut.
……..….…....(25) [ ] [ ] [ ]………...….…(26) ( ) ( ) ( ) …....(27) ( ) ( ) …....(28) ( ) ( ) …....(29) ( ) ( ) ( ) …....(30) √ ̅̅̅̅ √ ̅̅̅̅ √ | ̅̅̅̅ ̅̅̅̅|.(31)
Keterangan : (Chatcaval Pornpatkul,2009). A = Luas penampang tangki 1 dan 2 (cm2),
a = Luas penampang lubang keluaran tangki 1 dan 2 dan saluran penghubung antara tangki 1 dan 2 (cm2), 1 dan 2 adalah rasio bukaan katup (valve) pada lubang keluaran tangki 1 dan 2,
x=ratio valve antara tangki 1 dan tangki 2,
h1ss,h2ss adalah ketinggian air (steadystate) pada tangki 1 dan 2, g adalah gravitasi (cm 2/s) k1, k2 penguatan (gain) pompa 1 dan 2 (cm3/V.s)
T1 adalah konstanta waktu pada tangki 1, T2 adalah konstanta waktu pada tangki 2,
Txadalah konstanta waktu antara tangki 1 tangki 2. Maka di dapatkan transfer function coupled tank sebagai berikut : ………...(32) ……….…...(33) ……….…...(34) ...(35) Desain Kontroler PI Tangki 1 : Sehingga : ………....……(36) ………...….……(37) ………....……….(38) ………….………...…..(39) Permisalan : ………....………...…….…(40) ………..…...(41) ………...……...…………..(42) Tangki 2 : Sehingga ...(43) ………..…..…..(44) ………...………..………(45) ………...(46) Permisalan : ………..(47) ………....…(48)
………...…..(49) Desain Kontroler Fuzzy
Fuzifikasi
Fuzifikasi dalam Jurnal ini menggunakan metode triangular dan trapezoid. Masukkan pada kontroler fuzzy berupa error (e) dan perubahan error (de) dari flow cairan. Input yang digunakan untuk mendapatkan derajat keanggotaan. Membership function pada masing-masing antecedent (error dan delta error) terdiri dari 7fuzzy set (domain). Nama-nama fuzzy set tersebut adalah Negative Big (NB), Negative Medium (NM), Negative Small (NS), Zero (Z), Positive Small (PS), Positive Medium (PM), dan Positive Big (PB). Seperti yang ditunjukan pada Gambar 5 dan Gambar 6.
Gambar 5.Membership Function dari fuzifikaasi tangki 1
Gambar 6.Membership Function dari fuzifikaasi tangki 2
Rule Base
Rule base yang digunakan dalam jurnal ini menggunakan format tubular. Tabel 3 memperlihatkan rule base yang dipakai pada kontroler fuzzy. Rule base untuk membership function seperti Gambar 5 dan Gambar 6 menggunakan aturan seperti yang ditunjukan oleh Tabel 3.
Tabel 3 Rule Base kontroler PI-fuzzy.
Defuzifikasi
Defuzzyfikasi adalah proses memetakan besaran dari himpunan fuzzy ke dalam bentuk nilai crisp. Pada defuzifikasi input berupa derajat keanggotaan dalam bentuk luasan dan keluarannya berupa sebuah nilai dengan jumlah fuzzy set yang digunakan sebuah 7 buah, yaitu NB, NM, NS, Z, PS, PM, dan PB dengan tange output pada tangki 1 adalah -10,6 sampai 0 sedangkan pada tangki 2 adalah -16.1 sampai 0 seperti yang ditunjukan pada Gambar 7 dan Gambar 8.
Gambar 7.Membership Function dari Defuzifikaasi pada tangki 1
Gambar 8.Membership Function dari Defuzifikaasi pada tangki 2
Decoupling
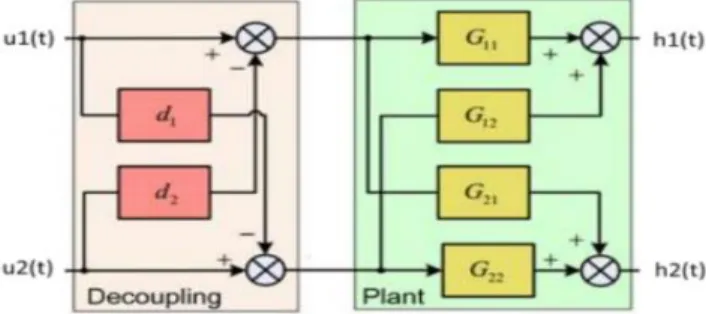
Plant Coupled-Tank memiliki dua input dan output yang punya pengaruh silang. output, h1t tidak hanya dipengaruhi oleh u1t tetapi juga dipengaruhi oleh u2t , begitu juga dengan h2. Plant pada proses semacam ini dapat disederhanakan seakan-akan seperti proses SISO dengan teknik Decoupling.
Decoupling mentransformasikan model TITO ke dalam SISO untuk memudahkan analisis dan perancangan kontroler. Perhatikan Gambar 9.
Gambar 9 Diagram blok plant dengan decoupling
Maka di dapatkan disain kontrol decoupling pada proses Coupled Tank. Di mana:
………(50) ……….(51) …………..………(52) HASIL DAN PEMBAHASAN
Pengujian Kontroler
Di dalam melakukan pengujian kontroler pada sistem coupled tank pada tahap ini dilakukan dengan membandingkan 2 jenis kontroler yaitu yang pertama dengan menggunakan kontroler konvesional yaitu PI, kedua menggunakan kontroler cerdas yaitu fuzzy. Untuk membandingkan kedua kontroler tersebut maka di lakukan pengujian kontroler set point konstan dengan Tangki 1 dengan set point 10 cm dan Tangki 2 dengan set point 15.
Hasil respon dari ketiga kontroler yang dibandingkan adalah td, tr, dan ts. Di mana td (Waktu tunda (delay time)) adalah waktu yang diperlukan oleh respon untuk mencapai setengah dari nilai steady state tunak untuk waktu pertama., tr (Waktu naik (rise time)) adalah waktu yang dibutuhkan oleh respon untuk naik dari 5% ke 95% atau 10% ke 90% dari nilai steady state, dan ts (Waktu tunak (settling time)) adalah waktu yang dibutuhkan respon untuk mencapai keadaan stabil (keadaan tunak) atau dianggap stabil.
Pengujian Plant dengan Kontroler terhadap Set Point Konstan
Pengujian plant dengan kontroler terhadap set point konstan pada tangki 1 adalah 10 cm dan tangki 2 adalah 15 cm. dan dilakukan dengan menggunakan kontroler yaitu PI dan FUZZY. Dan hasil responnya akan di bandingkan. Untuk mengetahui perbandingan respon antara kedua kontroler pada sistem coupled tank terhadap set point konstan dapat dilihat pada Gambar 10 dan Gambar 11.
a. Tangki 1 dengan set point konstan 10 cm
Gambar 10. Perbandingan respon coupled tank dengan set point konstan 10 cm pada tangki 1
Hasil pengujian analisa terhadap 2 kontroler dengan set point konstan pada tangki 1 sebesar 10 cm dapat dilihat pada Tabel 4.
Tabel 4 Analisa Perbandingan respon dengan set point 10 cm pada tangki 1
Pada Tabel 4 dapat di jelaskan bahwa kontroler PIlebih cepat mencapai nilai steady state dibandingkan dengan kontroler Fuzzy.dengan nilai td = 1,24s, tr = 18,04s, ts = 57,1s.
b. Tangki 2 dengan set point konstan 15 cm.
Gambar 11. Perbandingan respon coupled tank dengan set point konstan 15 cm pada tangki 2
Hasil pengujian analisa terhadap 2 kontroler dengan set point konstan pada tangki 2 sebesar 15 cm dapat dilihat pada Tabel 5.
Tabel 5. Analisa Perbandingan respon dengan set point 15 cm pada tangki 2
Pada Tabel 5 dapat di jelaskan bahwa kontroler PIlebih cepat mencapai nilai steady state dibandingkan dengan kontroler Fuzzy.dengan nilai td = 1,13 s, tr = 10,27s, ts = 44,89 s.
PENUTUP
Simpulan
Dari hasil perancangaan sistem pengendalian level fluida pada coupled tank untuk mendapatkan
Persamaan model matematika plant coupled tankdapat diperoleh dari persamaan kesetimbangan massa dan hukum Bernoulli setelah itu dilakukan dengan melakukan model linierisasi untuk mendapatkan nilai transfer function.
Pengujian plant sistem coupled tank dengan kontroler PI dan Fuzzy dengan set point konstan. kontroler PIlebih cepat mencapai nilai steady state dibandingkan dengan kontroler Fuzzy.
Saran
Saran yang dapat diberikan berdasarkan kesimpulan di atas adalah penerapan dengan kontroler lain agar hasilnya lebih maksimal menggunakan kontroler adaptif atau MPC. Sehingga output plant dapat mengikuti set point yang diinginkan dengan cepat, atau pun dengan adanya perubahan beban sistem dapat kembali ke set point awal dengan waktu yang lebih cepat. DAFTAR PUSTAKA
Al Faizin. Shaumi Arif, Pramudijanto. Josaphat, (2013) “Desain dan Implementasi Kontroler FuzzySupervised PID berbasis PLC pada SistemKontrol Level Cairan Coupled-Tank”, Surabya: Institut Teknologi Sepuluh November. Khalid. Muhammad Usman, Kadri. Muhammad Bilal,
(2009) “Liquid Level Controlof Nonlinear Coupled Tanks System usingLinear Model Predictive Control”, Pakistan Navy Engineering College National University of Sciences & Technology Karachi, Pakistan.
Numsomran. Arjin, Wongkum. Theerachai, Suksri. Tianchai, Nilas. Phongchai, Chaoraingern. Jutarut, (2007) “Design ofDecoupled Controller for TITO Systemusing Characteristic Ratio Assignment,” Faculty of Engineering, Department of Instrumentation Engineering, Pathumwan Institute of Technology. Bangkok, Thailand. International Conference on Control, Automation and Systems,in COEX, Seoul, Korea.
Onur.Karasakal, (2003) "AnImplementation of Peak Observer BasedSelf-Tuning Fuzzy PID-Type Controller on PLC", International Conference onElectrical and Electronics Engineering, Turkey.
Pornpatkul. Chatchaval, (2009)”Decentralized Fuzzy Logic Controller forTITO Coupled Tanks Process, Procedding IEE, Department of Instrumentation Engineering, Pathumwan Institute of Technology, Bangkok, Thailand, CROSSICE International Joint Conference.
Qomarudin. Mochamad Nur, (2013) ”Kontroler Fuzzy-PI untuk plant coupled-tank,” Surabaya.
Ramli. M.S, Ahmad. M.A, Ismail.Raja, (2009) “Comparison of Swarm Adaptive Neural Network Control of a Coupled Tank Liquid Level System” Faculty of Electrical & Electronics Engineering, University Malaysia Pohang, Malaysia.
Sadli. Muhammad, (2014) ”Disain Kontroler PI dengan Decoupling pada Sistem Kendali Level Coupled Tank,” Jurnal ECOTIPE, volume 1,No.2, Aceh Utara.
Suksri. Tianchai, (2007) “Design of 2-DOF PI Controller with Decoupling forCoupled-Tank Process”, Faculty of Engineering, Department of Instrumentation Engineering, Pathumwan Institute of Technology. Bangkok, Thailand. International Conference on Control , Automation and Systems , in COEX, Seoul, Korea.
Tunyasrirut.Satean, (2007) “LevelControl in Horizontal Tank by FuzzyPID Cascade Controller”, Procedding IEE Proc of King Mongkut’s Institute of Technology North Bangkok, Thailand.