Analisis Aliran Daya
Sudaryatno Sudirham
Dalam analisis rangkaian listrik, dilakukan idealisasi. Sumber dinyatakan sebagai sumber tegangan ideal atau sumber arus ideal, dan beban dinyatakan sebagai impedansi dengan karakteristik linier. Sumber tegangan ideal memberikan daya ke rangkaian pada tegangan tertentu, berapapun besar arus yang dibutuhkan oleh rangkaian; sumber arus ideal memberikan daya ke rangkaian pada arus tertentu, berapapun tegangan yang diperlukan oleh rangkaian. Oleh karena itu apabila rangkaian merupakan rangkaian linier, terdapat hubungan linier antara tegangan, arus dan impedansi, sehingga dalam melakukan analisis kita menghadapi persamaan-persamaan linier. Peubah-peubah rangkaian yang dilibatkan langsung dalam perhitungan adalah tegangan dan arus, sedangkan daya dihitung sebegai perkalian tegangan dan arus. Tegangan dan arus memberikan relasi-relasi linier sedangkan relasi daya tidaklah linier.
Analisis aliran daya pada sistem tenaga, bertujuan untuk melihat bagaimana aliran daya dalam sistem. Peubah yang terlibat dalan perhitungan adalah daya. Dengan menggunakan daya sebagai peubah sebagai peubah dalam perhitungan, maka persamaan yang kita hadapi menjadi bukan persamaan linier. Sumber, merupakan sumber daya yang hanya boleh beroperasi pada batas daya dan tegangan tertentu. Sementara itu beban adalah bagian rangkaian yang menyerap daya, sehingga ia dapat dinyatakan sebagai besar daya yang diminta/diperlukan, pada tegangan tertentu. Suatu permintaan daya hanya dapat dilayani selama pembebanan tidak melampaui batas daya yang mampu disediakan oleh sumber. Jadi walaupun rangkaian tetap rangkaian linier, namun relasi daya antara sumber dan beban tidaklah linier. Oleh karena itu jika persamaan rangkaian dengan daya sebagai peubah merupakan persamaan nonlinier. Dalam memecahkan persamaan nonlinier ini kita memerlukan cara khusus.
Ketentuan dalam Analisis Aliran Daya
Dalam analisis aliran daya, kita mengambil ketentuan-ketentuan sebagai berikut:
a). Sistem dalam keadaan seimbang; dengan keadaan seimbang ini kita dapat melakukan perhitungan dengan menggunakan model satu-fasa.
b). Semua besaran dinyatakan dalam per-unit; dengan menggunakan sistem satuan ini kita terbebas dari persoalan perbedaan tegangan di berbagai bagian sistem yang diakibatkan oleh pemanfaatan transformator dalam upaya penyaluran daya.
Bus-bus dalam rangkaian sistem tenaga merupakan simpul-simpul rangkaian yang biasa kita kenal dalam analisis rangkaian listrik. Bus-bus ini dapat dikelompokkan dalam beberapa jenis:
i) Bus-generator (generator bus), yaitu bus dimana generator dihubungkan melalui transformator. Daya yang masuk dari generator ke bus-generator ke-i (bus nomer i) dinyatakan sebagai
Gi Gi
Gi P jQ
S = + (1)
Dari bus ke-i ini, daya mengalir ke dua jurusan; jurusan yang pertama adalah langsung ke beban (jika ada) yang terhubung ke bus ini dan yang kedua adalah menuju saluran transmisi di mana daya akan mengalir ke tempat lain yang jauh. Daya yang langsung menuju beban dinyatakan dengan
Bi Bi
Bi P jQ
S = + (2)
sehingga daya yang menuju saluran transmisi di bus-i ini menjadi
Bi Gi i i i P jQ S S S = + = − (3)
ii) Bus-beban (load bus), yaitu bus yang tidak terhubung ke generator tetapi terhubung hanya ke beban. Dari bus-beban ke-j (nomor bus j) mengalir daya menuju ke beban sebesar SBj. Daya yang
masuk ke bus beban ini berasal dari saluran transmisi, yang dapat kita katakan bahwa daya mengalir dari bus-beban menuju saluran transmisi tetapi dengan tanda negatif; jadi daya yang keluar dari bus-beban ke-j adalah sebesar
Bj
j S
S =− (4)
iii) Slack Bus. Jika kita hanya memperhatikan daya sumber dan daya beban, teorema Tellegen tidak
akan terpenuhi karena masih ada daya keluar dari rangkaian yang tidak diketahui yaitu daya yang diserap oleh saluran dan transformator. Oleh karena itu, untuk keperluan analisis, jika tegangan semua beban diketahui, baik melalui dugaan perhitungan maupun ditetapkan, tegangan bus-generator juga harus dapat ditetapkan, maka ada satu bus yang dibiarkan mengambang; bus mengambang ini disebut slack bus. Slack bus seolah berfungsi sebagai simpul sumber bebas (dalam analisis rangkaian listrik yang biasa kita kenal) yaitu sumber atau bus generator yang memberikan tegangan sesuai dengan permintaan sistem. Dengan cara ini maka teorema Tellegen akan bisa dipenuhi.
Persamaan Arus-Tegangan
Persamaan aliran daya yang tidak linier sebagaimana dijelaskan di atas, harus diturunkan melalui persamaan arus dan tegangan karena persamaan arus dan tegangan ini merupakan persamaan linier yang sudah biasa kita hadapi. Pada bus generator terhubung generator ke bus melalui transformator. Karena dalam penurunan persamaan ini kita menggunakan sistem per-unit, maka impedansi transformator dapat disatukan dengan impedansi generator sehingga transformator tak perlu digambarkan lagi dalam diagram satu garis untuk analisis ini.
Sistem Dengan Dua Bus. Gb.1. berikut ini memperlihatkan diagram satu garis dan model satu-fasa suatu sistem yang terdiri dari hanya dua bus; keduanya adalah bus generator, yaitu bus-1 dan bus-2. Kedua bus dihubungkan melalui saluran transmisi dan di masing-masing bus terhubung beban yang menarik arus IB1 dan IB2.
Gb.1. Model satu-fasa. Diagram dan rangkaian ekivalen.
π π ekivalen rangkaian pada ansmisi saluran tr paralel admitansi : ekivalen rangkaian dalam bus antar seri impedansi : 2. -bus dan 1 -bus dari (langsung) beban arus : , 2 -bus dan 1 -bus dari ansmisi saluran tr ke arus : , netral -fasa tegangan : , generator fasa per daya : , 12 2 1 2 1 1 1 2 1 p B B G G y z S S I I I I V V Diagram rangkaian Rangkaian ekivalen 1 G S SG2 2 B S 1 I I2 p y yp s z 1 -bus bus-2 1 B S 1 G S SG2 1 V I1 V2 2 I 1 B I IB2 1 -bus bus-2 saluran transmisi
Kita tinjau bus-1. Arus yang keluar dari bus-1 ke saluran transmisi adalah 2 12 1 12 2 1 12 1 1 V (V V ) ( )V V I = yp +y − = yp + y −y (5.a)
dengany12=1 z/ 12adalah admitansi transfer antara bus-1 dan bus-2. Admitansi total yang dilihat oleh bus-1 didefinisikan sebagai
12 11 y y
Y = p + (5.b)
Dengan pengertian ini maka relasi (5.a) dapat ditulis
2 12 1 11 1 V V I =Y −y (6.a)
Dengan pengertian yang sama, kita peroleh relasi untuk bus-2 sebagai
1 12 2 22 2 V V I =Y − y (6.b)
Dengan demikian kita memperoleh persamaan untuk sistem dengan dua bus (dengan mengubah urutan penulisan pada (6.b)
1 22 1 12 2 2 12 1 11 1
V
V
I
V
V
I
y
Y
y
Y
+
−
=
−
=
(7)Sistem Dengan Tiga Bus. Untuk sistem dengan tiga bus, relasi (7) dikembangkan menjadi 3 33 23 2 12 3 3 23 1 22 1 12 2 3 13 2 12 1 11 1 V V V I V V V I V V V I Y y y y Y y y y Y + − − = − + − = − − = (8.a)
Secara formal, penulisan persamaan (8.a) adalah
3 33 23 2 12 3 3 23 1 22 1 12 2 3 13 2 12 1 11 1 V V V I V V V I V V V I Y Y Y Y Y Y Y Y Y + + = + + = + + = (8.b)
dengan
Y
ij=
−
y
ij. Persamaan (8.b) dapat kita tuliskan dalam bentuk matriks sebagai = 3 2 1 33 23 13 23 22 12 13 12 11 3 2 1 V V V I I I Y Y Y Y Y Y Y Y Y (9)
Sistem Dengan n Bus. Persamaan untuk sistem dengan tiga bus (9) dikembangkan untuk sistem dengan n bus menjadi
=
n nn n n n n n n nY
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
Y
V
V
V
V
I
I
I
I
.
.
.
.
.
.
.
.
.
.
.
3 2 1 3 2 1 3 33 23 13 2 23 22 12 1 13 12 11 3 2 1 (10.a)Persamaan (10.a) ini dapat kita tulis dengan ringkasn menjadi: bus bus bus
Y
V
I
[
]
~
~
=
(10.b)Persamaan Aliran Daya
Persamaan aliran daya dapat kita turunkan dengan memperhatikan arus yang mengalir ke saluran transmisi di setiap bus (tidak termasuk arus ke beban langsung). Untuk bus ke-i dalam sistim dengan n bus, kita dapatkan
∑
==
n j j ij iY
1V
I
(11) j V j i Y Y n i j j j j j ij ij ij ij bus di tegangan fasa sudut ; dan -bus antara admitansi fasa sudut ; ; ... , ... 2, , 1 = ∠ = = ∠ = =ψ
ψ
θ
θ
VDengan persamaan (11) ini kita dapat menghitung daya dari bus-i yang menuju saluran transmisi, yaitu
(
)
i i n j j j ij ij i i n j j ij i i i i jQ P V Y V Y S + = − ∠ − ∠ ∠ = = =∑
∑
= = ∗ ∗ ) ( 1 1ψ
θ
ψ
V V I V (12) dengan − − = − − =∑
∑
= = n j j ij i j ij i i n j j ij i j ij i i V Y V Q V Y V P 1 1 ) sin( dan ) cos(ψ
θ
ψ
ψ
θ
ψ
(13)Perhatikan bahwa Si adalah daya yang mengalir ke saluran transmisi. Hubungan dengan daya
generator bisa diperoleh melalui relasi (3) yaitu
Bi Gi i i i P jQ S S S = + = − sehingga − − = − − − = −
∑
∑
= = n j ij j i ij j i Bi Gi n j ij j i ij j i Bi Gi Y V V Q Q Y V V P P 1 1 ) sin( dan ) cos(θ
ψ
ψ
θ
ψ
ψ
(14)Persamaan (14) adalah dua persamaan yang kita peroleh untuk setiap bus-i. Dalam persamaan ini terdapat enam besaran peubah yang terkait dengan bus yang bersangkutan, yaitu
i i Bi Bi Gi Gi Q P Q V P , , , , , dan
ψ
(15)Jika bus-i adalah bus-generator, maka sebagian besaran yang terdapat pada persamaan (14) merupakan besaran yang diketahui atau ditentukan:
- PBi dan QBi adalah daya beban yang diketahui.
- PGi merupakan besaran yang diketahui karena daya nyata ini bisa ditentukan dengan mengatur
masukan uap di turbin misalnya.
- Vi juga tertentu besarnya karena bisa di atur melalui arus eksitasi.
- QGi walaupun tidak diketahui namun, akan tertentu besarnya jika tegangan dan sudut fasa di bus
yang lain diketahui.
- dengan demikian hanya tinggal satu peubah yang harus dihitung yaitu ψi (sudut fasa tegangan di
bus-i).
Jika bus-i adalah bus-beban, tak ada generator terhubung ke sini; PGi dan QGi bernilai nol, dan Bi
i Bi
i P Q Q
P =− dan =− keduanya diketahui (tanda minus pda PBi dan QBi diberikan karena daya
dianggap mengalir ke saluran). Dengan demikian untuk bus-beban hanya ada dua besaran peubah yang harus dihitung yaitu tegangan dan sudut fasanya, Vi dan ψi.
Jadi di setiap bus pada dasarnya hanya ada dua atau satu peubah yang harus dicari, yaitu Vi dan ψi di bus-beban dan ψi di bus-generator. Dalam satu jaringan transmisi yang terdiri dari total n bus,
dengan nG bus-generator dan satu slack-bus, terdapat besaran yang harus dihitung sebanyak G n n− − =2( 1) dihitung harus besaran (16)
Kebanyakan bus dalam sistem tenaga adalah bus-beban; hanya sebagian kecil dari total jumlah bus merupakan bus-generator.
Proses Pencarian Solusi
Solusi suatu persamaan aliran daya adalah mencari profil tegangan di semua bus dalam suatu sistem tenaga. Karena persamaan daya merupakan persamaan non-linier, maka solusi dilakukan dengan cara iterasi. Proses pencarian solusi adalah sebagai berikut:
1. Berdasarkan data teknis dari jaringan, tentukan elemen-elemen dari matriks [Ybus].
2. Pada bus-beban tentukan PB dan QB.
3. Pada bus-generator tentukan nilai tegangan bus V dan PG.
4. Buat slack-bus (bus nomer-1) bertegangan V1=1∠0o.
5. Asumsikan profil tegangan dan sudut fasanya, Vdan ψ, bus yang lain.
6. Masukkan data [Ybus] danprofil tegangan yang diasumsikan ke persamaan (14) untuk mencari Pi
dan Qi. Setiap kali iterasi dilakukan, bandingkan hasil perhitungannya dengan besaran yang
ditetapkan sesuai langkah-2 dan langkah-3 atau hasil perhitungan sebelumnya.
7. Selisih yang diperoleh pada langkah-6, digunakan sebagai dasar untuk melakukan koreksi pada langkah iterasi berikutnya sedemikian rupa sehingga selisih tersebut menjadi semakin kecil. 8. Ulangi langkah-langkah iterasi sampai selisih yang didapat mencapai nilai kecil yang dapat
Metoda Newton-Raphson
Formula Iterasi – Persamaan Rekursi. Dalam buku buku referensi, formula iterasi biasanya diturunkan melalui penguraian fungsi nonlinier menjadi deret Taylor dan mengabaikan suku-suku dengan orde tinggi. Di sini kita akan menurunkannya melalui pengamatan grafis.
Persamaan dengan Peubah Tunggal. Kita misalkan sebuah persamaan nonlinier dengan peubah tunggal
0 ) (x =
p (17) dan kita akan mencari solusinya dengan cara iterasi. Ruas kiri persamaan ini dapat kita pandang sebagai sebuah fungsi, dan kita misalkan fungsi ini adalah kontinyu dalam domain yang ditinjau. Kita dapat menggambarkan kurva fungsi ini di bidang px; nilai x sebagai solusi adalah titik potong kurva dengan sumbu-x, yaitu xsol, seperti terlihat pada Gb.2 di bawah ini. Indeks atas digunakan untuk menunjukkan langkah iterasi; misalnya x0 adalah iterasai ke-0 yaitu dugaan awal, x1 adalah iterasi ke-1, dan seterusnya.
Gb.2. Proses iterasi untuk persamaan p(x)=0.
Langkah pertama adalah menentukan dugaan awal solusi persamaan, yaitu x0. Jika kita masukkan solusi dugaan ini ke dalam persamaannya, kita memperoleh p(x0). Antara p(x0) ini dengan nilai yang ditentukan pada persamaan (17) yaitu 0, terdapat selisih sebesar
) ( 0 ) (x0 p x0 p = −
∆ ; perhatikan bahwa selisih ini bernilai negatif. Karena terjadi selisih tersebut, kita melakukan dugaan solusi baru yaitu x1 yang mendekati xsol; dugaan baru ini kita masukkan ke persamaan, dan akan memberikan p(x1). Jika p(x1)belum juga bernilai nol sebagaimana diharapkan, kita coba lagi nilai x2, dan demikian seterusnya sampai kita memperoleh suatu nilai x yang memberikan p(x)=0 atau sangat dekat dengan 0.
Menetukan x1 secara efektif dilakukan sebagai berikut. Setelah dugaan solusi x0 memberikan
p(x0), kita buat garis singgung pada kurva di titik p(x0) yaitu
dp
/ dx
0; garis singgung ini akan memotong sumbu-x di x1 yang berposisi tergeser sebesar ∆x0 dari posisi x0. Karena0 0 0 / ) ( /dx p x x dp = ∆ maka 0 0 0 ) / ( ) ( dx dp x p x = ∆
∆ . Karena ∆p(x0)bernilai negatif maka x1 kita tentukan dengan formula: 0 0 0 0 0 1 ) / ( ) ( dx dy x p x x x x = +∆ = + ∆ x1 akan memberikan ( 1) x
p yang memungkinkan kita menghitung
∆
x
1=
∆
p
(
x
1)
/
(
dp
/
dx
)
1yang akan memberikan x2; dan demikian seterusnya sampai kita mendapatkan ∆xnyang akan memberikan p(xn)≈0. p x sol x 0 dx dp 0 x ∆ 1 x ∆ ) (x p ) (x0 p 0 x 1 x 2 x ) (x1 p ) (x2 p
Secara umum formulasi dari proses iterasi ini dapat kita turunkan sebagai berikut: Jika xk adalah nilai x untuk iterasi ke-k maka
1 1 1 ) / ( ) ( − − − + ∆ = k k k k dx dp x p x x (18)
Persamaan (18) inilah persamaan rekursi atau formula iterasi.
Uraian di atas adalah untuk persamaan (17) dimana ruas kanan bernilai nol. Kita tinjau sekarang persamaan dengan ruas kanan tidak bernilai nol, yang kita tuliskan sebagai
P x
p( )= (19) denganP adalah tetapan. Ruas kiri (19) kita pandang sebagai fungsi x dengan kurva seperti pada Gb.2; akan tetapi solusi xsol yang dicari adalah nilai x pada titik potong antara p(x) dengan garis P sejajar sumbu-x . Situasi ini digambarkan pada Gb.3.
Gb.3. Proses iterasi untuk persamaan p(x)=P. Untuk persamaan (19) ini ∆x0 adalah
) / ( 0 0 0 dx dp p P x = +∆ x ∆ (20)
Kita coba untuk memahami persamaan terakhir ini. ∆px0 =P−p(x0)adalah perbedaan antara
nilai fungsi yang seharusnya, yaitu P, dengan nilai fungsi jika dugaan awal peubah x0 kita terapkan; perbedaan ini bernilai negatif. Perbedaan ini harus dikoreksi dengan mengoreksi dugaan awal sebesar ∆x0 sehingga nilai peubah berubah dari x0 menjadi x1 =x0 +∆x0; koreksi inilah koreksi terhadap dugaan awal. Setelah koreksi awal ini, perbedaan nilai fungsi terhadap nilai seharusnya adalah ∆p1=P−p(x1) yang lebih kecil dari ∆p0yang berarti nilai fungsi mendekati P. Koreksi peubah kita lakukan lagi untuk lebih mendekat lagi ke P; langkah koreksi ini merupakan iterasi pertama. Pada iterasi pertama ini kita akan memperoleh perbedaan ∆px2 =P− p(x2)
yang mungkin masih harus di koreksi lagi pada itersi ke-dua. Demikian seterusnya sampai kita peroleh ( − ( n))≈0
x p
P . Dalam perjalanan menuju P tersebut alur yang kita lewati adalah kurva
p(x). Secara umum, pada iterasi ke-k kita akan mempunyai persamaan yang memberikan
perbedaan nilai fungsi dengan nilai seharusnya, yaitu
k k k x dx dp p = ∆ ∆ ( / ) (21) Dengan pemahaman ini kita lanjutkan pengamatan pada suatu persamaan dengan dua peubah.
p x 0 x ) (x0 p sol x 0 / dx dp 1 x 0 x ∆ 2 x 1 x ∆ P ) (x p ) ( ) (x0 p x1 p − ) (x1 p
Persamaan Dengan Dua Peubah. Sepasang persamaan dengan dua peubah kita tuliskan sebagai
Q
y
x
q
P
y
x
p
=
=
)
,
(
)
,
(
(22) denganP dan Q adalah tetapan. Kita harus melakukan iterasi untuk dua peubah x dan y. Dugaan solusi awal memberikan persamaan yang merupakan pengembangan dari (21) yaitu0 0 0 0 0 0 0 0 0 0 0 0 0 0
)
/
(
)
/
(
)
,
(
)
/
(
)
/
(
)
,
(
y
y
q
x
x
q
y
x
q
P
q
y
y
p
x
x
p
y
x
p
P
p
∆
∂
∂
+
∆
∂
∂
=
−
=
∆
∆
∂
∂
+
∆
∂
∂
=
−
=
∆
(23)yang dapat kita tuliskan dalam bentuk matriks
0 0 0 0 0 / / / / ∆ ∆ = ∆ ∆ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = ∆ ∆ y x J y x y p x p y p x p q p (24) Matriks 2×2 turunan parsial terhadap x dan y disebut jacobian dan dinyatakan dengan simbol J. Apabila ∆p0 dan ∆q0 tidak bernilai nol maka
( )
0 0 1 0 ∆ ∆ = ∆ ∆ − q p J y x (25) Inilah persamaan untuk menentukan besar koreksi yang harus dilakukan setelah kita membuat dugaan awal. Dengan (25) ini dapat dihitung ∆x0 dan ∆y0 sehingga dapat diperoleh x1 dan y1 gunaiterasi selanjutnya. 0 1 ∆ + ∆ + = y y x x y x (26) Persamaan (26) ini adalah langkah iterasi ke-1. Secara umum, pada langkah ke-k kita mempunyai identitas dan persamaan-persamaan sebagai berikut:
( )
k k k k k k k k k k q p J y x y p x p J y x J q p y p P x p P q p ∆ ∆ = ∆ ∆ ∂ ∂ ∂ ∂ = ∆ ∆ = ∆ ∆ − − ≡ ∆ ∆ −1 4). ; / / ). 3 ; 2). ; ) ( ) ( ). 1 (27)Kita perhatikan persamaan ini. Persamaan pertama dari (27), yang berupa identitas, akan menentukan perlu tidaknya dilakukan koreksi (iterasi) lagi terhadap hasil perhitungan sebelumnya; oleh karena itu persamaan pertama tersebut disebut corrective force. Identitas ini menjadi ruas kiri persamaan ke-dua, yang terkait dengan koreksi peubah yang harus dilakukan melalui jacobian Jk yang nilainya diberikan oleh persamaan ke-tiga. Besar koreksi yang harus dilakukan diberikan oleh persamaan ke-empat. Setelah koreksi dilakukan, kita kembali pada persamaan pertama untuk melihat perlu tidaknya iterasi dilanjutkan lagi.
Aplikasi Metoda Newton-Raphsin Pada Analisis Aliran Daya
Berapa banyak peubah yang harus ditentukan dalam satu jaringan transmisi diberikaan oleh persamaan (16). Namun dalam menuliskan persamaan aliran daya, kita memperlakukan semua bus sebagai bus-beban, agar penulisan lebih terstruktur; ini berarti bahwa semua bus megandung dua peubah yaitu tegangan dan sudut fasanya, walaupun ada peubah yang sudah ditetapkan di beberapa bus-generator.
Karena slack-bus ditetapkan sebagai bus nomer-1, dengan tegangan 1∠0opu , maka kita bekerja mulai dari bus-2, dan nilai peubah yang harus dicari agar persamaan aliran daya terpenuhi adalah tegangan serta sudut fasa di setiap bus yaitu (V2 , V3, Vi ,..., Vn) dan (ψ2, ψ3, …., ψi, … ψn).
Pengembangan dari persamaan (28) untuk jaringan transmisi dengan n bus adalah sebagai berikut: k nk k n n nk k nk k n n nk k nk k n n k V q Q V q Q V p P V p P V p P q q p p p ψ − ψ − ψ − ψ − ψ − ≡ ∆ ∆ ∆ ∆ ∆ = ∆ ) ,..., ( ) ,..., ( ) ,..., ( ) ,..., ( ) ,..., ( ~ . ) 1 2 2 2 2 2 2 3 3 2 2 2 2 3 2 M M M M u (28.a) k k k J x u = ∆ ∆~ ). 2 (28.b) k n n n n n n n n n n n n n n n n n n n k q q V q V q V q q q V q V q V q p p V p V p V p p p V p V p V p p p V p V p V p ψ ∂ ∂ ψ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ψ ∂ ∂ ψ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ψ ∂ ψ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ψ ∂ ∂ ψ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ψ ∂ ψ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ = 2 2 3 2 2 2 2 2 3 2 2 2 2 3 2 3 2 3 3 3 3 2 3 2 2 2 2 3 2 2 2 ). 3 L L M L L L L M L L L L J (28.c)
( )
k k k n n k V V V u J x ~ ~ ). 4 1 2 3 2 ∆ = ψ ∆ ψ ∆ ∆ ∆ ∆ ≡ ∆ − M M (28.d)Kiranya perlu kita fahami arti dari persamaan-persamaan (28) ini, sebelum kita melangkah lebih lanjut.
• ∆u~k adalah vektor yang berisi perbedaan nilai daya di setiap bus terhadap nilai daya
yang ditetapkan/diperoleh di bus yang bersangkutan pada iterasi ke-k, baik daya nyata maupun daya reaktif.
• ∆x~kadalah vektor yang berisi koreksi peubah di setiap bus, yaitu tegangan dan sudut fasanya, yang diperoleh pada iterasi ke-k untuk melakukan iterasi selanjutnya. Pada waktu menetapkan dugaan awal misalnya, diperoleh ∆~x0 untuk melakukan koreksi pada iterasi ke-1; pada itersai ke-1 diperoleh ∆~x1 untuk melakukan koreksi pada iterasi ke-2; dan seterusnya.
• Matriks jacobian adalah matriks yang berisi laju perubahan daya, baik daya nyata maupun reaktif, terhadap perubahan tegangan maupun sudut fasa di setiap bus. Perhatikan bahwa daya merupakan fungsi semua peubah di setiap bus.Oleh karena itu perbedaan nilai daya di setiap bus dengan daya yang diperoleh dalam perhitungan pada iterasi ke-k, merupakan hasil kali matriks jacobian pada iterasi ke-k dengan
vektor koreksi tegangan maupun sudut fasa pada iterasi ke-k. Jika matriks jacobian
tidak bernilai nol, yang berarti bahwa dalam peninjauan secara grafis (pada persamaan dengan peubah tunggal misalnya), garis singgung pada kurva tidak sejajar dengan sumbu-x, besaran koreksi dapat dihitung dengan relasi (28.d),
( )
k k k u J x ~ ~ = 1 ∆∆ − . Inversi matriks jacobian dalam relasi ini, akan kita fahami
dengan meninjau sistem dengan dua bus seperti dalam contoh berikut. CONTOH Sistem Dua Bus
Untuk melihat aplikasi dalam perhitungan, kita akan melihat sistem dua bus seperti pada gambar berikut. Contoh ini diambil dari buku referensi, sedangkan perhitungan-perhitungan akan dilakukan secara manual dengan menggunakan “excel”. Dengan cara ini kita akan memahami langkah demi langkah proses perhitungan; angka hasil perhitungan yang kita lakukan dengan cara ini sedikit berbeda dengan angka yang tercantum dalam buku referensi karena pembulatan angka desimal. Diagram rangkaian untuk contoh ini terlihat pada halaman berikut, dimana saluran transmisi digambarkan sebagai rangkaian ekivale π.
Bus-1 adalah bus-generator tanpa beban langsung.Bus-2 adalah bus-beban.
Hal pertama yang harus dilakukan adalah mengumpulkan data jaringan; kemudian data jaringan ini kita nyatakan dalam per unit dengan memilih suatu nilai basis tertentu. Data jaringan adalah: S 75,65 0,011865 011495 , 0 002942 , 0 S 10 27 , 0 S 011765 , 0 002941 , 0 96 , 75 012127 , 0 96 , 75 4621 , 82 / 1 96 , 75 4621 , 82 80 20 o 12 22 11 3 o o 12 o 12 − ∠ = − = + = = × = − = − ∠ = ∠ = Ω ∠ = + = − j y y y y j y j y j z p p
Kemudian kita tetapkan nilai basis dan menyatakan besaran-besaran dalam per-unit, termasuk besaran yang ditetapkan.
Nilai Basis: S 001890 , 0 529 / 1 ; 529 230 / 100 kV 230 ; MVA 100 2 = Ω = = = ⇒ = = basis basis basis basis Y Z V S pu 0 1 o 1= ∠ V 1 -bus bus-2 1 1,Q P 80 20 12 j z = + S 10 27 , 0 × −3 = p y yp pu 1 1 2 j SB + = pu 2 2 2=V ∠ψ V
Besaran dalam per-unit: o 22 11 22 11 o 21 12 21 12 12 21 12 65 , 75 ; 2766 , 6 04 , 104 180 96 , 75 4151 , 6 00189 , 0 / 012127 , 0 − = θ = θ = = → = + − = θ = θ = = = − = = → Y Y Y Y y Y Y
Nilai-nilai peubah dan daya yang ditetapkan di bus adalah:
dihitung) (harus dan ; 1 ; 1 : beban) -(bus 2 0 ; 1 : ) (sebagai 1 -2 2 2 2 o 1 1 ψ − = − = = ψ = V Q P Bus V bus slack Bus
Matriks Y-bus. Dari data jaringan kita peroleh matriks [Ybus] sebagai berikut
[ ]
− ∠ ∠ ∠ − ∠ = = oo oo 22 21 12 11 64 , 75 2766 , 6 04 , 104 4151 , 6 04 , 104 4151 , 6 64 , 75 2766 , 6 Y Y Y Y bus Y (29)Persamaan Aliran Daya dan Jacobian. Secara umum, persamaan aliran daya di bus-i adalah
) sin( ) cos( 1 2 1 2 j ij j n j ij i i j ij j n j ij i i V Y V q V Y V p ψ − θ − ψ ∠ = ψ − θ − ψ ∠ =
∑
∑
= =Karena bus-1 menjadi slack bus sedangkan system ini terdiri dari hanya dua bus, maka perhitungan hanya dilakukan untuk bus-2. Persamaan daya untuk bus-2 dalam contoh ini menjadi )] sin( ) sin( [ )] sin( ) sin( [ ] cos( ) cos( [ )] cos( ) cos( [ 22 2 22 1 21 2 1 21 2 2 22 2 2 22 1 21 2 1 21 2 2 22 2 22 1 21 2 1 21 2 2 22 2 2 22 1 21 2 1 21 2 2 θ − + ψ − θ − ψ = ψ − θ − ψ + ψ − θ − ψ = θ − + ψ − θ − ψ = ψ − θ − ψ + ψ − θ − ψ = V Y V Y V V Y V Y V q V Y V Y V V Y V Y V p (30)
Daya nyata maupun reaktif untuk bus-2, dituliskan dengan huruf kecil karena ia masih akan berubah menuju nilai yang ditetapkan yaitu P2 = −1 dan Q2 = −1.
Sebenarnya, nilai yang sudah diketahui (ditetapkan) yaitu V1 =1 ,ψ1 =0 di slack bus, dan elemen-elemen matriks [Ybus], dapat kita masukkan ke dalam persamaan daya ini dan kita akan
mendapatkan persamaan yang lebih sederhana. Namun karena kita akan menggunakan excel, kita biarkan persamaan aliran daya ini seperti apa adanya agar mudah ditelusuri dalam
spreadsheet.
Karena kita hanya menghadapi dua persamaan daya, yaitu persamaan p2 dan q2 dengan dua
peubah yaitu V2 dan ψ2, maka matriks jacobian akan berukuran 2×2.
∂ ∂ ψ ∂ ∂ ∂ ∂ ψ ∂ ∂ = 2 2 2 2 2 2 2 2 / / / / V q q V p p J (31.a) dengan elemen-elemen:
)] sin( 2 ) sin( ) cos( ] cos( 2 ) cos( ) sin( 22 2 22 1 21 2 1 21 2 2 1 21 2 1 21 2 2 2 22 2 22 1 21 2 1 21 2 2 1 21 2 1 21 2 2 2 θ − + ψ − θ − ψ = ∂ ∂ ψ − θ − ψ = ψ ∂ ∂ θ − + ψ − θ − ψ = ∂ ∂ ψ − θ − ψ − = ψ ∂ ∂ V Y V Y V q V Y V q V Y V Y V p V Y V p (31.b)
Dugaan Awal dan Iterasi. Kita buat dugaan awal yaitu nilai awal daya di bus-2. Seberapa dekat nilai dugaan yang kita buat ini ke nilai yang ditetapkan, akan menentukan seberapa cepat kita sampai ke iterasi terakhir. Kita coba dugaan awal
= ψ ≡ 1 0 ~ 0 2 0 2 0 V x (32)
Kita masukkan dugaan awal ini ke persamaan aliran daya (30) untuk mendapatkan nilai
0 2 0
2 dan q
p . Dari sini kita peroleh corrective force:
− − − − == ∆ ∆ = ∆ 0 2 0 2 0 2 2 0 1 1 ~ q p q p u (33)
Corrective force menentukan besar koreksi yang harus dilakukan, yaitu koreksi atas dugaan
awal yang kita buat. Koreksi itu adalah:
( )
( )
− − − − = ∆ = ∆ ψ ∆ ≡ ∆ − − 0 2 0 2 0 1 0 0 1 0 2 0 2 0 1 1 ~ ~ q p V J u J x (34)Setelah dugaan awal dikoreksi, hasil koreksi menjadi besaran-besaran pada iterasi berikutnya yaitu iterasi ke-1. Formulasi (29) sampai dengan (34) kita gunakan dalam perhitungan menggunakan excel. Semua besaran akan berubah setiap kali iterasi, kecuali besaran yang sudah ditetapkan, P2, Q2, dan elemen matriks [Ybus].
Hasil Perhitungan. Dalam perhitungan ini, sudut fasa tegangan dinyatakan dalam radian.
Perhitungan jacobian inversi dilakukan dengan eliminasi Gauss-Jordan. Berikut ini ditulis lagi data [Ybus] , persamaan aliran daya, kemudian diberikan hasil perhitungan dalam tabel. Elemen
matriks jacobian dan inversinya langsung dicantumkan dalam tabel.
[ ]
− ∠ ∠ ∠ − ∠ = = oo oo 22 21 12 11 64 , 75 2766 , 6 04 , 104 4151 , 6 04 , 104 4151 , 6 64 , 75 2766 , 6 Y Y Y Y bus Y θ − + ψ − θ − ψ θ − + ψ − θ − ψ = ) sin( ) ( ) sin( ) cos( ) ( ) cos( 22 2 2 22 1 21 2 1 21 2 22 2 2 22 1 21 2 1 21 2 2 2 V Y V Y V V Y V Y V q p θ − + ψ − θ − ψ ψ − θ − ψ θ − + ψ − θ − ψ ψ − θ − ψ − = )] sin( 2 ) sin( ) cos( ] cos( 2 ) cos( ) sin( 22 2 22 1 21 2 1 21 1 21 2 1 21 2 22 2 22 1 21 2 1 21 1 21 2 1 21 2 V Y V Y V Y V V Y V Y V Y V JBesaran Awal Iterasi ke-1
P2 -1 (tetapan)
Q2 -1
ψ2 0 (dugaan awal) -0.1169 (koreksi atas
dugaan awal) V2 1 0.8250 substitusi ke persamaan p2 5.29E-06 -0.8149 q2 -0.14283 -0.8109 Corrective force ∆p2 -1.0000 -0.1851 ∆q2 -0.8572 -0.1891 Elemen jacobian 6.2235 1.5559 4.9496 0.2959 -1.5559 5.9379 -1.8739 4.0337
Elemen jacobian inversi 0.1508 -0.0395 0.1966 -0.0144
0.0395 0.1581 0.0913 0.2412
Koreksi ∆ψ∆v2 -0.1169 -0.0337
2 -0.1750 -0.0625
Besaran Iterasi ke-2 Iterasi ke-3
P2 Q2 ψ2 -0.1506 (koreksi atas iterasi ke-1) -0.1552 (koreksi atas iterasi ke-2) V2 0.7625 0.7535 substitusi ke persamaan p2 -0.9803 -0.9996 q2 -0.9784 -0.9996 Corrective force ∆p2 -0.0197 -0.0004 ∆q2 -0.0216 -0.0004 Elemen jacobian 4.5137 -0.0993 4.4518 -0.1543 -1.8849 3.3532 -1.8830 3.2551
Elemen jacobian inversi 0.2243 0.0066 0.2292 0.0109
0.1261 0.3020 0.1326 0.3135
Koreksi ∆ψ∆v2 -0.0046 -0.0001
2 -0.0090 -0.0002
Besaran Iterasi ke-4 Iterasi ke-5
P2
Iterasi ke-5 tidak dilakukan. Pada iterasi ke-4
p2 dan q2 sudah dianggap sama dengan P2 dan Q2 yang ditetapkan. Daya di slack bus: P1 = 1.1229 Q1 = 1.2677 Q2 ψ2 -0.1553 (koreksi atas iterasi ke-3) V2 0.7533 substitusi ke persamaan p2 -0.99999983 ≈−1 q2 -0.99999981 ≈−1 Corrective force ∆p2 -2.0000 ∆q2 -2.0000 Elemen jacobian 4.4505 -0.1554 -1.8829 3.2531 Elemen jacobian inversi 0.2293 0.0110 0.1327 0.3137 ∆ψ2 -0.4806
Sampai iterasi ke-3, p2 =−0.9996≈−1 dan q2 =−0.9996≈−1. Pada iterasi ke-4 nilai tersebut sudah dapat dikatakan sama dengan nilai P2 dan Q2 yang ditetapkan. Oleh karena itu
iterasi ke-5 tidak perlu dilakukan lagi.
Profil Tegangan Sistem dan Daya Pada Bus-Generator. Pada Iterasi terakhir (iterasi ke-4) kita peroleh profil tegangan sistem dua bus ini sebagai berikut
o 2
2 o
1
1=1pu; ψ =0 dan V =0,7533pu ;ψ =−0,1553rad=-8.90 V
dengan diagram fasor:
Pada kondisi ini, daya yang dialirkan ke saluran transmisi dari bus-2 adalah (seperti tercantum dalam tabel, iterasi terakhir):
beban) -(bus pu 1 ; pu 1 2 2 =− Q =− P
Sedang dari slack bus (dihitung dari persamaan aliran daya) adalah: generator) -(bus pu 1,27 ; pu 12 , 1 1 1 = Q = P
Dalam contoh ini tegangan jatuh di saluran cukup besar, dan susut daya di saluran, yang diperlihatkan oleh selisih P1 dan P2 cukup besar pula yaitu Psal =1,12−1=0,12 pu≈ 12%.
CONTOH Sistem Tiga Bus
Contoh ini juga diambil dari buku referensi. Seperti pada contoh sebelumnya, perhitungan-perhitungan di sini dilakukan secara manual dengan menggunakan excel.
Diagram rangkaian beserta data jaringan yang diketahui diberikan berikut ini.
S 00189 , 0 529 / 1 , 529 100 / 230 V 230 MVA, 100 2 = Ω = = = = = basis basis basis basis Y Z V S kV 15 MVA, 300 1= G kV 15 MVA, 250 3 = G
Saluran transmisi dianggap sebagai lossless line dan admitansi parallel tidak
diperhitungkan. Admitansi seri saluran per fasa sudah dihitung dalam per unit:
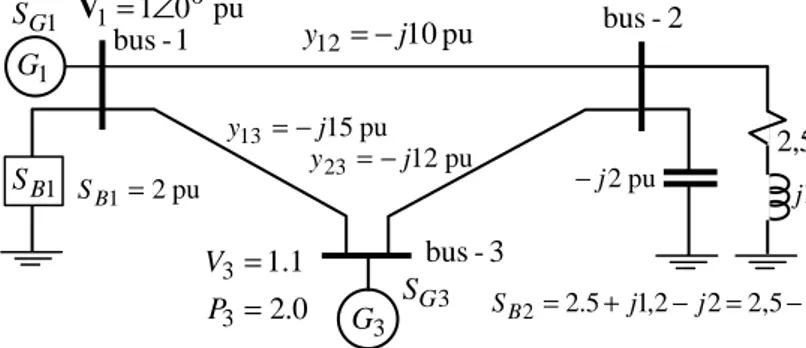
o 32 32 o 31 31 o 32 31 33 o 23 23 o 21 21 o 23 12 22 o 13 13 o 12 12 o 13 12 11 90 12 ; 90 15 ; 90 27 90 12 ; 90 10 ; 90 22 90 15 ; 90 10 ; 90 25 ∠ = − = ∠ = − = − ∠ = + = ∠ = − = ∠ = − = − ∠ = + = ∠ = − = ∠ = − = − ∠ = + = y Y y Y y y Y y Y y Y y y Y y Y y Y y y Y pu 0 1 o 1= ∠ V 1 -bus y12=−j10pu bus-2 pu 15 13 j y =− 0 . 2 1 . 1 3 3 = = P V 1 B S 2pu 1= B S pu 12 23 j y =− 3 -bus 1 G S 3 G S 3 G 1 G pu 2 j − pu 5 , 2 pu 2 , 1 j 0,8 2,5 2 2 , 1 5 . 2 2 j j j SB = + − = − 2 V V1
Matriks Ybus. Dari perhitungan di atas kita dapatkan matriks sebagai berikut:
[ ]
− ∠ ∠ ∠ ∠ − ∠ ∠ ∠ ∠ − ∠ = = o o o o o o o o o 33 32 31 23 22 21 13 12 11 90 27 90 12 90 15 90 12 90 22 90 10 90 15 90 10 90 25 Y Y Y Y Y Y Y Y Y bus Y (35)Peubah-Peubah Dan Pembebanan Pada Bus. Bus-1: slack bus, V1=1 ψ1=0o. Daya di bus
1 1 dan Q
P ini tergantung dari profil tegangan di semua bus; jadi P1 dan Q1 merupakan peubah
tak bebas, dihitung setelah iterasi selesai.
Bus-2: bus-beban. Beban di bus ini dinyatakan dengan resistor yang menyerap daya nyata pu 5 , 2 = R
P , terhubung seri dengan induktor yang menyerap daya reaktif QL = j1,2pu . Sebuah kapasitor dihubungkan ke bus-2 dan menyerap daya reaktif sebesarQC =−j2. Total beban yang tersambung ke bus-2 menjadi SB2 =2,5− j0,8. Beban di bus-2 yang mengalir ke saluran transmisi menjadi P2 =−2,5 dan Q2 = j0,8. Peubah di bus ini adalah tegangan dan sudut fasanya, V2 dan ψ2.
Bus-3: bus-generator. Daya nyata dari generator di diberikan melalui pengaturan masukan uap (di turbin) sebesar P3 =2,0pu sedangkan tegangan diatur melalui arus eksitasi sebesar
pu 1 , 1
3 =
V ; oleh karena itu peubah di bus ini tinggallah sudut fasa tegangan ψ3. Jadi peubah yang harus dihitung pada sistem ini adalah V2,ψ2 ,dan ψ3.
Persamaan Aliran Daya.Bentuk umum persamaan aliran daya adalah
ψ − θ − ψ = ψ − θ − ψ =
∑
∑
= = n j j ij i j ij i i n j j ij i j ij i i V Y V q V Y V p 1 1 ) sin( ) cos(Karena bus-1 adalah slack bus maka kita akan bekerja pada bus-2 dan bus-3. Di bus-2, daya yang harus dicapai pada akhir iterasi adalah P2 =−2,5 dan Q2 =0,8. Sedangkan di bus-3 daya nyata yang harus dicapai adalah P2 =2,0. Jadi dalam sistem ini diberikan tiga tetapan daya, dengan tiga peubah. Oleh karena itu persamaan aliran daya terdiri dari tiga persamaan yaitu untuk p2, p3, dan q2. )] sin( ) ( ) sin( ) sin( )] cos( ) ( ) cos( ) cos( )] cos( ) ( ) cos( ) cos( 22 2 2 22 3 23 2 3 23 2 1 21 2 1 21 2 2 33 2 3 33 2 32 3 2 32 3 1 31 3 1 31 3 3 22 2 2 22 3 23 2 3 23 2 1 21 2 1 21 2 2 θ − + ψ − θ − ψ + ψ − θ − ψ = θ − + ψ − θ − ψ + ψ − θ − ψ = θ − + ψ − θ − ψ + ψ − θ − ψ = V Y V Y V V Y V q V Y V Y V V Y V p V Y V Y V V Y V p (36)
Jacobian.Persamaan aliran daya terdiri dari tiga persamaan seperti ditunjukkan oleh (36) dengan tiga peubah yaitu V2,ψ2,dan ψ3. Matriks jacobian akan berukuran 3×3, yaitu
∂ ∂ ψ ∂ ∂ ψ ∂ ∂ ∂ ∂ ψ ∂ ∂ ψ ∂ ∂ ∂ ∂ ψ ∂ ∂ ψ ∂ ∂ = 2 2 3 2 2 2 2 3 3 3 2 3 2 2 3 2 2 2 / / / / / / / / / V q q q V p p p V p p p J (37.a)
) sin( 2 ) cos( ) cos( ) cos( ) cos( ) sin( ) sin( ) sin( )] cos( 2 ) cos( ) cos( ) sin( ) sin( ) sin( 22 2 22 3 23 2 3 23 2 3 2 3 23 2 3 23 2 1 21 2 1 21 2 2 2 2 32 3 32 3 2 3 2 32 3 2 32 3 1 31 3 1 31 3 3 3 2 32 3 2 32 3 2 3 22 2 22 3 23 2 3 23 1 21 2 1 21 2 2 3 23 2 3 23 2 3 2 3 23 2 3 23 2 1 21 2 1 21 2 2 2 θ − + ψ − θ − ψ − = ψ ∂ ∂ ψ − θ − ψ + ψ − θ − ψ = ψ ∂ ∂ ψ − θ − ψ + = ∂ ∂ ψ − θ − ψ − ψ − θ − ψ − = ψ ∂ ∂ ψ − θ − ψ + = ψ ∂ ∂ θ − + ψ − θ − ψ + ψ − θ − ψ = ∂ ∂ ψ − θ − ψ + = ψ ∂ ∂ ψ − θ − ψ − ψ − θ − ψ − = ψ ∂ ∂ V Y V Y V q V Y V V Y V q Y V V p V Y V V Y V p V Y V p V Y V Y V Y V p V Y V p V Y V V Y V p (37.b) Dugaan Awal dan Iterasi. Kita coba dugaan awal
= ψ ψ ≡ ∆ 0 0 1 ~ 0 3 0 2 0 2 0 V x (38)
Kita masukkan dugaan awal ini ke persamaan aliran daya untuk mendapatkan corrective force:
− − − − = − − − = ∆ ∆ ∆ ≡ ∆ 0 2 0 3 0 2 0 2 2 0 3 3 0 2 2 2 3 2 0 8 , 0 2 5 , 2 ~ q p p q Q p P p P q p p u (39) Besar koreksi
( )
( )
− − − − = ∆ = ∆ − − 0 2 0 3 0 2 0 1 0 0 1 0 8 , 0 2 5 , 2 ~ ~ q p p J u J x (40)Hasil Perhitungan. Dalam perhitungan ini, sudut fasa tegangan dinyatakan dalam radian. Perhitungan jacobian inversi pada dilakukan dengan eliminasi Gauss-Jordan. Berikut ini ditulis lagi data Ybus , persamaan aliran daya, formulsi jacobian, kemudian diberikan hasil perhitungan
dalam tabel. Elemen matriks jacobian dan inversinya langsung dicantumkan dalam tabel.
− ∠ ∠ ∠ ∠ − ∠ ∠ ∠ ∠ − ∠ = = o o o o o o o o o 33 32 31 23 22 21 13 12 11 90 27 90 12 90 15 90 12 90 22 90 10 90 15 90 10 90 25 Y Y Y Y Y Y Y Y Y bus Y
θ − + ψ − θ − ψ + ψ − θ − ψ θ − + ψ − θ − ψ + ψ − θ − ψ θ − + ψ − θ − ψ + ψ − θ − ψ = )] sin( ) ( ) sin( ) sin( )] cos( ) ( ) cos( ) cos( )] cos( ) ( ) cos( ) cos( 22 2 2 22 3 23 2 3 23 2 1 21 2 1 21 2 33 2 3 33 2 32 3 2 32 3 1 31 3 1 31 3 22 2 2 22 3 23 2 3 23 2 1 21 2 1 21 2 2 3 2 V Y V Y V V Y V V Y V Y V V Y V V Y V Y V V Y V q p p ∂ ∂ ψ ∂ ∂ ψ ∂ ∂ ∂ ∂ ψ ∂ ∂ ψ ∂ ∂ ∂ ∂ ψ ∂ ∂ ψ ∂ ∂ = 2 2 3 2 2 2 2 3 3 3 2 3 2 2 3 2 2 2 / / / / / / / / / V q q q V p p p V p p p J
Sistem 3 bus Besaran Awal Iterasi ke-1
P2 -2.5 (tetapan) P3 2 Q2 0.8 ψ1 0 V1 1 ψ2 0 (dugaan awal) -0.0929 Koreksi atas dugaan awal V2 1 1.0962 ψ3 0 0.0260 V3 1.1 (tetapan) substitusi ke persamaan aliran daya p,q p2 0.0000 -2.7349 p3 3E-15 2.2399 q2 -1.2000 1.1530 corrective force ∆p2 -2.5 0.2349 ∆p3 2 -0.2399 ∆q2 2.0000 -0.3530 Elemen matriks jacobian 23.2000 -13.2000 0.0000 25.2812 -14.3669 -2.4950 -13.2000 29.7000 0.0000 -14.3669 30.8614 1.5668 0.0000 0.0000 20.8000 -2.7349 1.7175 25.1673 Elemen matriks jacobian inversi 0.0577 0.0256 0.0000 0.0542 0.0250 0.0038 0.0256 0.0451 0.0000 0.0250 0.0441 -0.0003 0.0000 0.0000 0.0481 0.0042 -0.0003 0.0402 Koreksi ψ2 -0.0929 0.0054 ψ3 0.0260 -0.0046 V2 0.0962 -0.0131
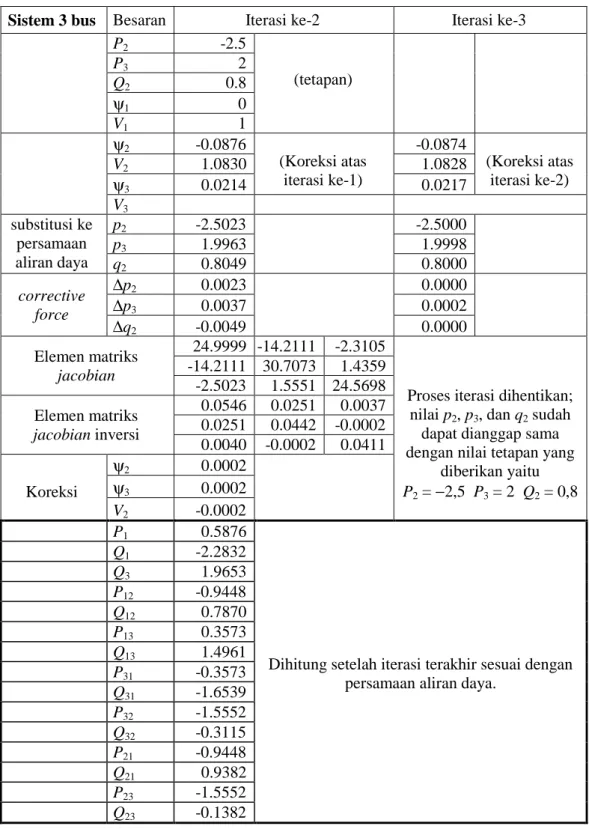
Sistem 3 bus Besaran Iterasi ke-2 Iterasi ke-3 P2 -2.5 (tetapan) P3 2 Q2 0.8 ψ1 0 V1 1 ψ2 -0.0876 (Koreksi atas iterasi ke-1) -0.0874 (Koreksi atas iterasi ke-2) V2 1.0830 1.0828 ψ3 0.0214 0.0217 V3 substitusi ke persamaan aliran daya p2 -2.5023 -2.5000 p3 1.9963 1.9998 q2 0.8049 0.8000 corrective force ∆p2 0.0023 0.0000 ∆p3 0.0037 0.0002 ∆q2 -0.0049 0.0000 Elemen matriks jacobian 24.9999 -14.2111 -2.3105
Proses iterasi dihentikan; nilai p2, p3, dan q2 sudah
dapat dianggap sama dengan nilai tetapan yang
diberikan yaitu P2 = −2,5 P3 = 2 Q2 = 0,8 -14.2111 30.7073 1.4359 -2.5023 1.5551 24.5698 Elemen matriks jacobian inversi 0.0546 0.0251 0.0037 0.0251 0.0442 -0.0002 0.0040 -0.0002 0.0411 Koreksi ψ2 0.0002 ψ3 0.0002 V2 -0.0002 P1 0.5876
Dihitung setelah iterasi terakhir sesuai dengan persamaan aliran daya.
Q1 -2.2832 Q3 1.9653 P12 -0.9448 Q12 0.7870 P13 0.3573 Q13 1.4961 P31 -0.3573 Q31 -1.6539 P32 -1.5552 Q32 -0.3115 P21 -0.9448 Q21 0.9382 P23 -1.5552 Q23 -0.1382
Profil Tegangan Sistem. Pada iterasi terakhir kita perloeh profil tegangan sistem tiga bus ini yaitu o 3 3 o 2 2 o 1 1 24 , 1 rad 0214 , 0 pu 1 , 1 0 , 5 rad 0876 , 0 pu 08 , 1 0 pu; 1 = = ψ = − = − = ψ = = ψ = V V V
Aliran Daya Antar Bus. Kita akan melihat bagaimana aliran daya antar bus di saluran transmisi. Aliran daya ini kita hitung menggunakan relasi
(
)
) sin( ) sin( ) cos( ) cos( ) ( 1 2 1 2 j ij j ij i ij i ij ij j ij j ij i ij i ij ij j ij i i ij i j i ij i ij i ij V Y V V Y Q V Y V V Y P Y Y Y S ψ − θ − ψ − θ − = ⇒ ψ − θ − ψ − θ − = ⇒ − = − = × =V I∗ V V V ∗ V ∗V ∗ V ∗V∗yang tidak lain adalah bentuk awal dari persamaan aliran daya sebelum cara penulisannya diubah untuk memperoleh bentuk pernyataan yang lebih terstruktur. Hasil perhitungan tercantum dalam bagian tabel yang diberi batas garis tebal. Dari bagian tabel tersebut kita peroleh daya kompleks antar bus dan daya kompleks di setiap bus.
Bus-1: pu 2,283 0,588 pu 1,496 0,357 pu 0,787 0,945 1 13 12 j S j S j S + − = ⇒ + = + − = Bus-3: pu 1,965 1,912 pu 0.311 555 , 1 pu 1,654 0,357 3 32 31 j j S j S j S − − = ⇒ − − = − − = Bus-2: pu 0,800 2,500 pu 138 , 0 555 , 1 pu 0.938 945 , 0 2 23 21 j S j S j S + − = ⇒ − − = + − =
Antara bus-1 dan bus-3 aliran daya hanya terjadi dari bus-3 ke bus-1; daya di bus-3 1,654
0,357
31 j
S =− − sedangkan daya di bus-1 S13 =0,357+ j1,496. Daya nyata yang dikirim oleh bus-3 tepat sama dengan daya nyata yang diterima bus-1; hal ini terjadi karena saluran transmisi merupakan lossless line. Perbedaan antara daya reaktif yang dikirim bus-3 dan yang diterima bus-1 adalah daya reaktif yang terserap di saluran yaitu sebesar j0,158pu.
Aliran daya di bus-2 dari arah bus-1 adalah S21=−0,945+ j0.938 sedang dari arah bus-3 138 , 0 555 , 1 23 j
S =− − dengan jumlah yang sesuai yang ditetapkan yaitu S2 =−2.500+ j0.800. Penyerapan daya reaktif di saluran antara bus-1 dan bus-2 adalah j0,151pu sedangkan antara bus-3 dan bus-2 j0,499pu.
Bus-Generator.Kita perhatikan sekarang dua bus-generator pada sistem ini yaitu bus-1 dan bus-3. Seperti kita pelajari di bab sebelumnya, mesin sinkron memiliki batas-batas maksimum dan minimum dalam mencatu daya reaktif agar tidak over-excited ataupun under-excited. Oleh karena itu pada setiap langkah iterasi perlu dicermati apakah batas-batas tersebut tidak dilampaui.Jika pada suatu tahap iterasi batas tersebut dicapai, maka batas tersebut dijadikan besaran tetapan untuk dipakai dalam melakukan iterasi selanjutnya.
3 V 1 V 2 V
Persamaan aliran daya di bus generator adalah θ − ψ − ψ = − θ − ψ − ψ = −
∑
∑
= = n j ij j i ij j i Bi Gi n j ij j i ij j i Bi Gi Y V V Q Q Y V V P P 1 1 ) sin( dan ) cos( atau PGi −PBi =Pi dan QGi −QBi =QiDengan demikian maka
pu 3 , 58 684 , 2 283 , 2 412 , 1 pu 283 , 2 0 283 , 2 pu 412 , 1 2 588 , 0 o 1 1 1 1 1 1 1 ∠ = + = ⇒ = + = + = = + − = + = j S Q Q Q P P P G B G B G dan pu 8 , 45 742 , 2 pu 965 , 1 0 965 , 1 pu 912 , 1 0 912 , 1 o 3 3 3 3 3 3 3 ∠ = ⇒ − = + − = + = − = + − = + = G B G B G S Q Q Q P P P
Karena daya basis adalah 100 MVA, maka
MVA 2742 dan MVA 2684 3 1= G = G S S
Ternyata SG1 masih dalam batas kapasitas G1 yaitu 300 MVA; akan tetapi SG3 melebihi
kapasitas generator G3 yang 250 MVA. Kita dapat menurunkan pasokan daya nyata oleh G3;
pasokan daya ini ditetapkan PG3 =2pu pada awal iterasi. Jika tetapan ini kita kurangi dengan diimbangi tambahan daya nyata dari G1 agar kebutuhan daya di seluruh sistem terpenuhi, maka
hasil iterasi ulang dari awal (tidak disajikan dalam tabel) memberikan: profil tegangan o 3 3 o 2 2 o 1 1 21 , 0 rad 0035 , 0 pu 1 , 1 60 , 5 rad 0977 , 0 pu 083 , 1 0 pu; 1 = = ψ = − = − = ψ = = ψ = V V V
daya di setiap bus
pu 1.9491 1.5022 pu 0.8000 2.5000 pu 2.2772 0.9978 3 2 1 j S j S j S − − = + − = + − = daya generator: pu 52,38 2,461 1,9491 1,5022 pu 25 , 66 2,488 2,2772 1,0022 3 o 1 ∠ = − − = − ∠ = − = j S j S G G