SISTEM KENDALI ROKET UNTUK GERAK
UNPITCHING
Rika Andiarti, Edi Sofyan
Peneliti Bidang Kendali, Pustekwagan, LAPAN
ABSTRACT
A missile control system utilizing Proportioncd-Integrcd-Derivative (PID) controller is proposed. With this controller, t h e missile is constrained to flight with zero pitch angle. By choosing LAPAN's missile RKX-100 as a dynamic model, this PID controller is applied. Simulation results show t h a t the applying controller seems to be effective in missile unpitching manuver.
ABSTRAK
Dalam p a p e r ini, m e t o d a kontrol Proportional-Integral-Deriuative (PID) d i g u n a k a n u n t u k gerak unpitching roket (sudut pitch s a m a dengan nol). Gerakan ini diperlukan misalnya u n t u k m e n g a r a h k a n k a m e r a p a d a target tertentu. Model roket yang dipakai a d a l a h model roket kendali y a n g t e n g a h d i k e m b a n g k a n LAPAN, yaitu RKX-100, d i m a n a parameter-parameter aero-dinamiknya d i d a p a t k a n dari analisa software. Hasil simulasi m e n u n j u k a n b a h w a kontroler PID c u k u p efektif d i g u n a k a n dalam k a s u s ini.
Kata k u n c i : PID Controller, Missile, Unpitching
1 PENDAHULUAN
Pengembangan roket kendali yang dilakukan LAPAN, sedikit demi sedikit telah m e n u n j u k a n hasil y a n g c u k u p menggembirakan. Hal ini d i d u k u n g oleh perkembangan yang dicapai dalam sistem telemetri, sensor navigasi, sensor indra dinamik d a n t e n t u saja sistem aktuator.
S a a t ini p e n g e m b a n g a n roket kendali s u d a h m e m a s u k i t a h a p aplikasi kendali aktif. Berbeda d e n g a n pengen-dalian secara pasif, dimana gerakan roket s u d a h diatur sejak sebelum terbang, dalam kendali aktif, m a s u k a n n y a h a n y a b e r u p a tujuan yang ingin dicapai (bisa b e r u p a s u d u t , posisi, a t a u yang lainnya). Dan dalam sistem kendali aktif ini, kontroler a k a n mengeluarkan perintah ke control surface u n t u k bergerak meme-n u h i tujuameme-n yameme-ng telah ditetapkameme-n.
Dalam paper ini, m e t o d a kontrol PID d i g u n a k a n u n t u k mengendalikan gerakan roket agar selama terbang tidak m e m b e n t u k s u d u t pitch (sudut pitch s a m a dengan nol). Hal inilah yang men-dasari istilah gerak unpitching. Gerakan ini diperlukan misalnya u n t u k
mengarah-k a n mengarah-k a m e r a p a d a target tertentu, dalam h a l ini target h a r u s l a h b e r u p a target diam. Gerakan unpitching j u g a d i b u t u h -k a n saat -kita mengingin-kan traye-ktori roket b e r b e n t u k garis datar, seperti y a n g biasa dilakukan oleh misil jelajah (cruise missile). Tetapi u n t u k m e n d a p a t k a n tra-yektori datar ini, kontroler unpitching saja belum c u k u p . Kita h a r u s m e m b u a t s e b u a h kontrol yang m a m p u menjaga gerak unpitching d a n sekaligus menjaga ketinggian roket selalu k o n s t a n .
Dalam simulasi y a n g dilakukan, model roket yang dipakai adalah model roket kendali yang tengah dikembang-k a n LAPAN, yaitu RKX-100, d i m a n a parameter-parameter aerodinamiknya didapatkan dari analisa software. Simu-lasi gerak unpitching ini dilakukan dengan menggunakan software SIMULINK.
2 DINAMIKA TERBANG ROKET
Pembuatan dinamika terbang roket p a d a prinsipnya terdiri dari 5 b u a h u n i t seperti terlihat p a d a G a m b a r 2 - 1 . Unit pertama adalah p e n e n t u a n karakteristik geometri roket, dinamik a t a u inersia roket
dan aerodinamik roket yang b i a s a n y a diberikan dalam stability derivatives seperti CI, Cd, Cm dan lain sebagainya. Penentuan karakteristik aerodinamik ini dilakukan dengan m e n g g u n a k a n Missile DATCOM, CFD seperti FLUENT dan Experimental di terowongan angin serta uji terbang. Dalam tulisan ini pendekatan DATCOM d i g u n a k a n u n t u k memodelkan roket RKX-100.
Setelah karakteristik roket didapat-kan, dan kondisi terbang serta sistem kontrol dan navigasi d i t e n t u k a n , m a k a semuanya menjadi m a s u k a n u n t u k u n i t penyelesaian persamaan gerak roket, yang bisa direpresentasikan baik dalam 3 derajat k e b e b a s a n (3DOF) a t a u p u n 6 DOF. Software yang digunakan MATLAB untuk menyelesaikan nonlinear differential equations dengan basis metode Runga-Kutta. Sebenarnya, selain MATLAB a d a juga pemodelan dengan Visual Nastran. Software ini c u k u p baik digunakan u n t u k melihat p e n g a r u h p e r u b a h a n gaya-gaya yang ada pada roket terhadap kinematika
roket. Representasi grafisnya-pun c u k u p baik, n a m u n software ini m e m e r l u k a n waktu proses yang agak lama. Sehingga hanya d i g u n a k a n u n t u k pemodelan lokal gerak seperti u n t u k melihat olah gerak pada s a a t - s a a t kritis seperti s a a t roket keluar launcher, p e n g a r u h gerakan sirip dan fenomena lain sejenisnya.
Unit terakhir adalah bagian visualisasi hasil dari olah gerak roket yang dimodelkan. Ada beberapa cara yang d a p a t d i g u n a k a n u n t u k memvisua-lisasikan hasil ini tergantung dari tujuan penggunaannya. Misalnya Simulink 3DOF dan 6DOF animation blok di Aerospace
blockset s a n g a t m u d a h d i g u n a k a n u n t u k digabungkan dengan blok-blok lainnya di simulink, n a m u n a d a keterbatasan fleksibilitas penampilannya. Virtual Reality, bisa d i g u n a k a n u n t u k menampilkan pe-modelan roket d a n hasil gerakannya dengan c u k u p fleksibel, n a m u n k a r e n a kecepatan processing a g a k r e n d a h , m a k a VR k u r a n g cocok u n t u k d i g u n a k a n pe-modelan secara real-time.
2 . 1 Karakteristik Roket RKX-100
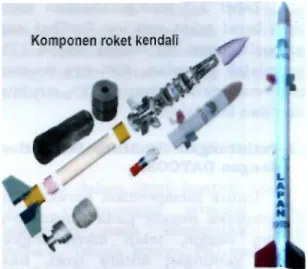
Roket RKX-100 m e r u p a k a n seri roket yang didesain u n t u k d i g u n a k a n sebagai platform penguji sistem kendali yang sedang dikembangkan di kedeputian Bidang Teknologi Dirgantara-LAPAN. Roket-roket ini m e m p u n y a i panjang sekitar 1.5 m dengan berat total 20 s.d 25 kg. Roket ini berkonfigurasi canard, dan mempunyai 4 b u a h fixed sirip dipasang menyilang di bagian belakang (Gambar 2-2). T e r g a n t u n g dari elevasi p e l u n c u r a n yang digunakan, roket ini bisa m e n c a p a i j a r a k j a n g k a u dari 3 hineea 7 km.
Gambar 2-2: Contoh roket RKX100-C04 dengan breakdown kom-p o n e n y a n g d i g u n a k a n Komponen u t a m a roket RKX 100-C04 terdiri dari steel nosel, grafit, HTPB propelan, steel cap, igniter, t a b u n g motor, sistem recovery, dan m u a t a n roket seperti terlihat p a d a G a m b a r 2-2 d a n Tabel 2 - 1 . T a b u n g roket berdiameter 100 cm ini terbuat dari Seamless Stainless Steel A304, sedangkan s t r u k t u r canard-nya terbuat dari b a h a n a l u m u n i u m .
Tabel 2-1: MATERIAL RGKET RKX100-C04
G a m b a r 2-3: R a n c a n g a n roket RKX100-C04
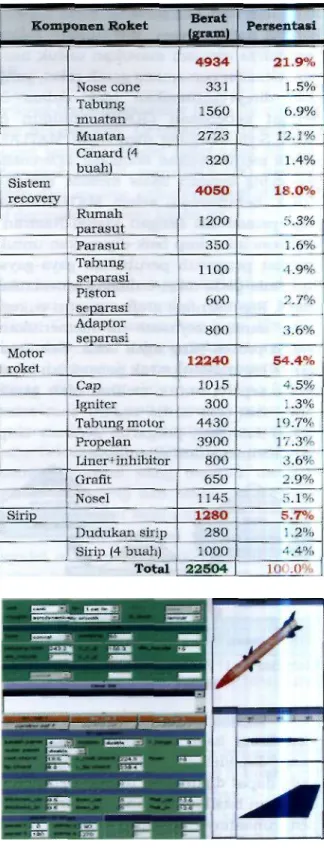
Tabel 2-2 me m pe rlih at ka n kom-posisi berat roket seri ini. Terlihat dari komposisi berat ini b a h w a h a n y a 17% nya a d a l a h propelan, 40%-nya m u a t a n s e r t a recovery d a n sisanya 3 3 % s t r u k t u r roket d a n lain-lainnya.
2 . 2 Perhitungan Stability Derivatives dengan DATCOM
U n t u k memprediksi karakteristik aerodinamika missile p a d a tingkat pre-liminary design, telah dikembangkan metoda g a b u n g a n a n t a r a teori, hasil pengujian terowongan angin d a n r u m u s semi-empiris. Metoda ini dibuat menjadi program yang d i s e b u t sebagai DATCOM method. K h u s u s u n t u k missile telah dibuat Missile DATCOM. Perhitungan karakteristik aerodinamik missile dengan Missile DATCOM d a p a t dilakukan d a l a m waktu yang singkat. Dengan Missile DATCOM, preliminary design s e b u a h missile d a p a t dipercepat dan tidak me-ngeluarkan biaya y a n g mahal. Sistem a n t a r - m u k a DATCOM telah
dikembang-k a n dengan m e n g a n d a l dikembang-k a n dikembang-k e m a m p u a n sistem graphical user interface (GUI) t e r b a r u yang terdapat di dalam software MATLAB Release 13. Dengan a n t a r m u k a ini p e n g g u n a a n software ini menjadi lebih m u d a h d a n interactive. G a m b a r di bawah memperlihatkan tampilan a n t a r -m u k a tersebut.
Tabel 2-2: KOMPOSISI TIPIKAL BERAT ROKET RKX-100
Hasil dari perhitungan y a n g di peroleh di-plot u n t u k melihat trend dari derivatives y a n g didapat, seperti g a m b a r di bawah ini.
2.3 Persamaan gerak roket
Penyelesaian p e r s a m a a n gerak roket disini dilakukan dengan melakukan beberapa pendekatan diantaranya dengan mencoba menyelesaikan p e r s a m a a n n o n l i n e a r differential equation d a l a m 3 Dof d a n 6 Dof. P a d a u m u m n y a gerak roket d a p a t dimodelkan dalam gerakan dan s u m b u aksis seperti terlihat di Gambar 2-4.
P e r s a m a a n gerak roket 3 derajat k e b e b a s a n (3Dof) diberikan oleh per-s a m a a n 2 - 1 .
Simulasi gerak roket dilakukan dengan menggunakan aerospace blockset toolbox yang a d a di Matlab. Toolbox ini sangat m u d a h digunakan d a n memper-cepat proses pemodelan yang biasanya h a r u s dilakukan dengan c u k u p lama. Blok Euler angles mensimulasikan gerak roket dalam 6 derajat kebebasan. Keenam b u a h p e r s a m a a n diferensial secara simultan diselesaikan dengan m e n g g u n a k a n metode Runge Kutta yang c u k u p h a n d a l di Matlab.
3 SISTEM KENDALI ROKET
Di dalam teori kontrol modern, teknik p e r a n c a n g a n sebagian besar d id as ar k an p a d a konfigurasi state-feedback. Teknik kontrol PID merupakan satu bentuk k h u s u s dari skema kontrol state feedback tersebut. Dan dapat d i k a t a k a n p u l a b a h w a kontrol PID m e r u p a k a n s u a t u b e n t u k yang paling sederhana dari s e m u a teknik kompensasi sistem kontrol yang m e n g g u n a k a n operasi t u r u n a n d a n integral. Dalam blok diagram, kontroler PID dapat di-g a m b a r k a n sebadi-gai berikut :
Sistem unity feedback secara u m u m dapat dilihat p a d a blok diagram G a m b a r 3 - 1 .
Dalam konfigurasi ini, kontroler ditempatkan secara seri dengan plant. Maka, konfigurasi sistem seperti ini biasa disebut series atau cascade compensation. Konfigurasi ini paling b a n y a k dipakai di dalam desain sistem kontrol.
Seperti telah diketahui, salah s a t u manfaat p e n g g u n a a n feedback adalah u n t u k m e n i n g k a t k a n performansi sistem kontrol itu sendiri. Di dalam prakteknya, bisa saja kita h a n y a m e n g g u n a k a n term proporsional saja (P), term integral dan proporsional (PI) a t a u term proporsional dan derivative (PD). Hal itu disesuai dengan k e b u t u h a n d a n s a n g a t t e r g a n t u n g dari karakteristik sistem yang a k a n kita kontrol.
S e k a r a n g m a r i kita p e r h a t i k a n cara kerja pengendali PID p a d a sistem loop t e r t u t u p m e n g g u n a k a n s k e m a yang terlihat p a d a G a m b a r 3 - 1 . Variabel (e) m e n g g a m b a r k a n tracking error, nilai m a s u k a n yang berbeda (R), keluaran a k t u a l (Y). Signal error ini a k a n dikirim ke pengendali PID, dan pengendali a k a n menghitung k e s e l u r u h a n t u r u n a n dan
integral dari signal error ini. Signal (u) yang telah melewati pengendali, sekarang s a m a dengan proporsional p e n g u a t a n (Kp) dikalikan u k u r a n k e s a l a h a n n y a d i t a m b a h p e n g u a t a n integral (Ki) dikalikan u k u r a n k e s a l a h a n integralnya d i t a m b a h p e n g u a t a n t u r u n a n (KD) dikalikan u k u r a n k e s a l a h a n derivasinya. Pengendali Proporsional a k a n memberikan efek mengurangi waktu naik, tetapi tidak m e n g h a p u s k e s a l a h a n k e a d a a n t u n a k . Pengendali Integral a k a n memberikan efek m e n g h a p u s k e s a l a h a n k e a d a a n t u n a k , tetapi berakibat m e m -b u r u k n y a respon transient. Pengendali Derivatif a k a n memberikan efek mening-k a t n y a stabilitas sistem, mengurangi overshoot, d a n menaikkan respon transfer.
Teknik kontrol PID ini diterapkan p a d a p e r s a m a a n gerak roket di paragraf 2 . 3 , d e n g a n t u j u a n u n t u k m e m b u a t s u d u t pitch (9) s a m a dengan nol. Manuver ini diperintahkan k e p a d a roket p a d a fase k e d u a , yaitu fase sustainer. P a d a fase ini thrust relatif kecil, dan kecepatan roket-p u n c u k u roket-p kecil, sehingga m a n u v e r unpitching dapat berjalan dengan baik.
4 HASIL SIMULASI DAN ANALISA 4.1 Desain Simulasi
Persamaan-persamaan model roket, berikut sistem kendalinya, sebelum disimulasikan, d i b u a t model simulasinya. Model simulasi ini m e n g g u n a k a n blok-blok fungsi yang ada dalam software SIMULINK. Hal ini a k a n m e m u d a h k a n dilakukannya simulasi, j u g a m e m u d a h -k a n -kita u n t u -k mengganti parameter-parameter yang dibutuhkan. Gambar 4-1 m e n u n j u k k a n model simulasi gerak un-pitching roket dengan software SIMULINK.
Dalam simulasi ini diberikan thrust sebesar 1500 N, u n t u k booster, sedangkan s u s t a i n e r n y a m e m p u n y a i thrust sebesar 250 N. Kontroler PID mulai diaktifkan pada saat sustainer s u d a h bekerja, tepat-nya p a d a detik ke-12. Dan sustainer ini d i a s u m s i k a n bekerja efektif selama 33 detik.
Roket RKX10-C04 merupakan roket kendali, dengan sistem a k t u a t o r
meng-gunakan servo motor. Empat b u a h aktuator d i p a s a n g p a d a masing-masing sirip kanard u n t u k menggerakan roket sesuai dengan p e r i n t a h {command). Se-dangkan s u d u t defleksi k a n a r d dapat dibaca dari encoder yang dipasang di setiap kanard. Adapun spesiiikasi struktur roket ini seperti disampaikan p a d a paragraf 2 . 1 .
4 . 3 Analisa Hasil Simulasi
Dari hasil simulasi terlihat b a h w a kontroler y a n g telah dirancang dapat bekerja dengan baik, h a l ini ditunjukan oleh kurva s u d u t pitch t e r h a d a p waktu (Gambar 4-2). Sesaat setelah roket di-p e r i n t a h k a n u n t u k m e m b e n t u k s u d u t pitch s a m a d e n g a n nol, yaitu p a d a detik ke-12, canard mulai terdefleksi dan
respons fime-nya c u k u p baik, sekitar 6 detik, dengan k e s a l a h a n p a d a k e a d a a n t u n a k s a m a dengan nol. Defleksi canard (Gambar 4-3) terlihat di awal mengalami overshoot, tetapi kembali bergerak stabil setelahnya u n t u k m e m e n u h i s u d u t pitch s a m a dengan nol. Adapun range a t a u j a r a k j a n g k a u roket y a n g dicapai sekitar
14 km, dengan ketinggian m a k s i m u m 1 km (Gambar 4-4). Dalam k a s u s ini, ketinggian tidak menjadi u k u r a n perfor-m a n s i roket. Sedangkan j a r a k j a n g k a u sejauh ini diperoleh dengan s u s t a i n e r yang bekerja efektif selama 33 detik d a n s u d u t elevasi roket sebesar 70°.
Memang s e c a r a hardware, desain ini tidak begitu saja m u d a h dibuat. Tetapi, d a p a t memanfaatkan HWIL
(hardware in the loop simulation) u n t u k menguji kinerja kontroler, d i m a n a roketnya sendiri bisa b e r u p a sebuah model simulasi. Pengujian inilah yang selanjutnya h a r u s dilakukan sebelum
selanjutnya h a r u s dilakukan sebelum memasuki pengujian terowongan angin m a u p u n pengujian terbang.
5 KESIMPULAN
Ada b e b e r a p a haj y a n g d a p a t di-simpulkan dari hasil simulasi pengen-dalian roket u n t u k gerak unpitching, yaitu
• Hasil simulasi m e n u n j u k k a n b a h w a kontroler PID c u k u p baik digunakan u n t u k gerak unpitching roket.
• Dari bentuk input y a n g diperlukan u n t u k menghasilkan gerak unpitching ini, m a k a d a p a t dilihat b a h w a gerakan canard d a p a t direalisasikan dalam b e n t u k hardware.
• Langkah berikutnya dari hasil simulasi ini a k a n dilakukan simulasi HW1L {hardware in the loop) simulation dimana sistem kontroler y a n g telah dirancang dan d i b u a t a k a n b i s a diuji kinerjanya sebelum roket secara keseluruhan dapat diuji di terowongan angin m a u p u n diuji- t e r b a n g k a n .
• J e n i s kontroler lain y a n g d a p a t dikembangkan a d a l a h sistem constant-height controller, d i m a n a roket diperin-tahkan u n t u k bisa menjaga ketinggian
yang tetap selama terbang. Tipe kontroler ini sangat diperlukan ter-u t a m a ter-u n t ter-u k roket tipe jelajah sehingga tidak d a p a t terdeteksi radar, selain itu u n t u k menghasilkan range y a n g c u k u p j a u h .
DAFTAR RUJUKAN
Franklin, Gere F., \998.Digital Control of Dynamic Systems,3*Men\o Park, CA: Addison Wesley Longmann.
Garnell, P., a n d East, D., 1980. Guided Weapon Systems, Pergamon, Oxford. Ogata, Katsuhito, 1 9 9 1 . Modern Control
Engineering, 2n d. Prenuce Hall of
India.
Riyadl, Ahmad; Sofyan, Edi, 2005. Pengembangan Sistem Antar-Muka Missile Datcom Untuk Perhitungan Karakteristik Aerodinamika Roket Dan Rudal, Seminar SIPTEKGAN IX, 2 2 S e p t e m b e r 2 0 0 5 , J a k a r t a .
The Mathworks, 2005. Aerospace Blockset User's Guide, version 2, sept-05. W. Bolton. MECHATRONICS, 1995.
Elec-tronic Control Systems In Mechanical Engineering I. Addison Wesley Longman Limited.