Perancangan Miniatur Lampu Lalu Lintas Pintar Sistem Fuzzy Logic Berbasis Mikrokontroler AT89S51
Kolombus Siringo-ringo, ST., MM dan Kosmas Manalu Politeknik Santo Thomas
Ringkasan dan Summary
Miniatur lampu lalu lintas pintar sistem fuzzy logic berbasis mikrokontroler dirancang bangun dengan memakai IC AT89S51 sebagai pusat pengolah data bit, mikrokontroler IC AT89S51 terlebih dulu diprogram dengan memakai downloader MCS-51. Metal detektor dipasang pada jalur persimpangan untuk mendeteksi jumah kendaraan. Kendaraan ada maka metal detektor mengeluarkan bit 1 dan tidak ada kendaraan sehingga dikeluarkan bit 0, bit ini diterima mikrokontroler untuk diproses.
Durasi waktu hidup lampu hijau lebih lama bila metal detektor pada jalur tersebut mengirimkan bit 1 lebih banyak dan tetap lampu merah pada jalur yang tidak ada kendaraan. Dijalur yang kendaraannya sangat sedikit maka durasi waktu hidup lampu hijau sebentar.
Keyword: lampu lalu lintas pintar, fuzzy logic, mikrokontroler AT89S51
Pendahuluan
Perkembangan teknologi elektronika sekarang ini cukup pesat sehingga berbagai jenis peralatan listrik/ elektronika yang berkualitas tinggi dan ekonomis dapat dibuat. Peralatan listrik/ elektronika yang berkualitas dan ekonomis dapat dibuat dengan menggunakan teknologi mikrokontroler karena mikrokontroler merupakan suatu chip yang dapat diprogram dan dihapus isi memorinya berbantuan komputer. Mikrokontroler yang diprogram dapat berfungsi sebagaimana layaknya sebuah CPU menerima dan memproses sinyal bit data yang diterima untuk mengendalikan peralatan listrik/ elektronika.
Perumusan Masalah
Perumusan masalah dari penelitian ini dalam bidang rancang bangun dapat dirumuskan sebagai berikut:
a. Bagaimana lampu lalu lintas dapat bekerja secara otomatis menyesuaikan waktu merah dan hijau sesuai dengan perubahaan panjang antrian kendaraan dijalur persimpangan jalan raya?
b. Bagaimana sistem fuzzy logic diterapkan pada lampu lalu lintas pintar dapat mengendus panjang antrian dijalur persimpangan jalan raya?
c. Apakah jenis komponen/ bahan metal detektor mampu mendeteksi panjang antrian kendaraan sehingga miniatur lampu lalu lintas pintar sistem fuzzy logic dapat direalisasikan?
Tinjauan Pustaka 1. Mikrokontroler
Mikrokontroler AT89S51 merupakan sebuah chip yang dapat diprogram dan dihapus isi memorinya berkali-kali berbantuan komputer. Konfigurasi pin-pin IC Mikrokontroler AT89S51 seperti ditunjukkan pada gambar 1.
Gambar 1. Konfigurasi Pin-Pin IC AT89S51 a. Pin 1 sampai 8 (Port 1.0 s/d Port 1.7)
c. Pin 9 Merupakan masukan reset (aktif tinggi), pulsa transisi dari rendah ke tinggi akan mereset mikrokontroler ini.
d. Pin 10 sampai 17 (Port 3.0 s/d Port 3.7)
e. Ini adalah port 3 merupakan saluran/bus I/O 8 bit dua arah dengan internal pull-ups yang memiliki fungsi pengganti. Bila fungsi pengganti tidak dipakai, maka ini dapat digunakan sebagai port paralel 8 bit serbaguna. Selain itu sebagian dari port 3 dapat berfungsi sebagai sinyai.8 kontrol pada saat proses pemograman dan verifikasi.
f. Bit Fungsi Alternatif
g. P3.0 sebagai RXD alamat BOH; Untuk menerima data port serial h. P3.1 sebagai TXD alamat B1H; Untuk mengirim data port serial i. P3.2 sebagai INT0 alamat B2H; Interupsi eksternal 0
j. P3.3 sebagai INTI 1 alamat B3H; Interupsi eksternal 1
k. P3.4 sebagai T0 alamat B4H; InputEksternal waktu/pencacah 0 l. P3.5 sebagai Tl alamat B5H; Input Eksternal waktu/pencacah 1 m. P3.6 sebagai WR alamat B6H; Jalur menulis memori data eksternal n. P3.7 sebagai RD alamat B7H; Jalur membaca memori data eksternal o. Pin 18 dan 19
Ini merupakan masukan ke penguat osilator berpenguat tinggi. Pada mikrokontroier ini memiliki seluruh rangkaian osilator yang diperlukan pada serpih yang sama (on chip) kecuali rangkaian kristal yang mengendalikan frekuensi osilator. Karenanya 18 dan 19 sangat diperlukan untuk dihubungkan dengan kristal. Selain itu XTAL 1 dapat juga sebagai input untuk inverting oscilator amplifier dan input ke rangkaian internal clock sedangkan XTAL 2 merupakan output dari
inverting oscilator amplifier. p. Pin 20
Merupakan ground sumber tegangan yang diberi simbol GND. q. Pin 21 sampai 28 (Port 2.0 s/d Port 2.7)
Ini adalah port 2 yang merupakan saluran/bus I/O 8 bit dua arah dengan internal pull-ups. Saat pengambilan data dari program memori eksternal atau selama mengakses data memori eksternal yang menggunakan alamat 16 bit (MOVX @ DPTR), port 2 berfungsi sebagai saluran/bus alamat tinggi (A8-A15). Sedangkan pada saat mengakses ke data.9 memori eksternal yang menggunakan alamat 8 bit (MOVX @ Rl), port 2 mengeluarkan isi dari P2 pada Special Function Register.
r. Pin 29
Program Store Enable (PSEN) merupakan sinyal pengontrol untuk
mengakses program memori eksternal masuk ke dalam bus selama proses pemberian/pengambilan instruksi (fetching).
s. Pin 30
Address Latch Enable (ALE)/PROG merupakan penahan alamat memori
t. Pin 31
External Access Enable (EA) merupakan sinyal kontrol untuk
pembacaan memori program.
u. Apabiia diset rendah (L) maka mikrokontroler akan melaksanakan seluruh instruksi dari memori program eksternal sedangkan apabila diset tinggi (H) maka mikrokontroler akan melaksanakan instruksi dari memori program internal ketika isi program. 11 counter kurang dari 4096. Ini juga berfungsi sebagai tegangan pemograman (VPP = +12 V) selama proses pemograman.
v. Pin 32 sampai 39 (Port 0.0 s/d Port 0.7)
Ini adalah port 0 yang merupakan saluran/bus I/O 8 bit open colector, dapat juga digunakan sebagai multipleks bus alamat rendah dan bus data selama adanya akses ke memori program eksternal. Pada saat proses pemograman dan verifikasi port 0 digunakan sebagai saluran/bus data.
External pull-ups diperlukan selama proses verifikasi. w. Pin 40
Merupakan positif sumber tegangan yang diberi simbol Vcc.
2. Pengertian Logika Fuzzy
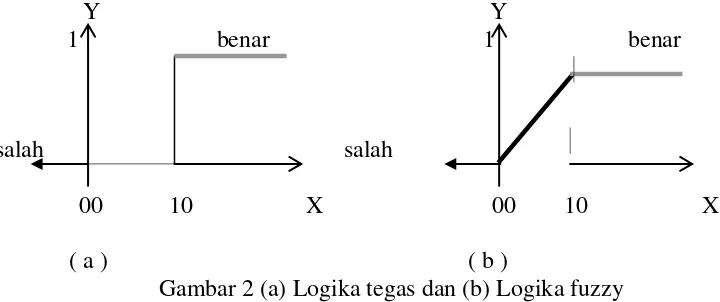
Sebelum munculnya teori logika fuzzy ( Fuzzy Logic ), dikenal sebuah logika tegas ( Crisp Logic ) yang memiliki nilai benar atau salah secara tegas. Sebaliknya logika fuzzy merupakan sebuah logika yang memiliki nilai kekaburan atau kesamaran (Fuzzyness) antara benar dan salah. Dalam teori logika fuzzy sebuah nilai bisa bernilai benar dan salah secara bersamaan namun berapa besar kebenaran dan kesalahan suatu nilai tergantung kepada bobot keanggotaan yang memilikinya. Perbedaan antara kedua jenis logika tersebut adalah: logika tegas memiliki nilai salah = 00 dan benar = 10, sedangkan logika fuzzy memiliki nilai antara 00 hingga 10 secara grafik perbedaan antara logika tegas dan logika fuzzy ditunjukkan oleh gambar 2.
Gambar 2 (a) Logika tegas dan (b) Logika fuzzy
dikatakan salah. Didalam ganbar 2.1 b) nilai X sama dengan 9, atau 8 atau 7 atau nilai antara 0 dan 10 adalah dikatakan ada benarnya dan ada juga salahnya.
Dalam teori logika fuzzy dikenal himpunan fuzzy ( fuzzy set ) yang merupakan pengelompokan sesuatu berdasarkan variabel bahasa ( linguistik
variable ), yang dinyatakan dalam fungsi keanggotaan. Didalam semesta
pembicaraan (universe of discourse) U, fungsi keanggotaan dari suatu himpunan fuzzy tersebut benilai antara 00 sampai dengan 10.
3. Konsep Perancangan
Blok diagram konsep perancangan sistem pengaturan lampu Ialu lintas dengan pengendali logika fuzzy berbasis Mikrokontroler AT89S51 ini secara lengkap ditunjukkan pada gambar 3.
Gambar 3. Diagram Blok Perancangan Lampu Lalu Lintas Pintar Beberapa istilah yang digunakan dalam pengendalian lampu lalu lintas (LL), antara lain, untuk sebaran kendaraan adalah : Tidak Padat (TP), Kurang Padat (KP), Cukup Padat (CP), dan Sangat Padat (SP). Jelas istilah-istilah tersebut dapat menimbulkan kerancuan (ambiguity) dalam pengertiannya. Logika Fuzzy dapat mengubah kerancuan tersebut ke dalam model matematis sehingga dapat diproses lebih lanjut untuk dapat diterapkan dalam sistem kendali. Menggunakan teori himpunan Fuzzy, logika bahasa dapat diwakili oleh sebuah daerah yang mempunyai jangkauan tertentu yang menunjukkan derajat keanggotaannya. Untuk kasus disini, sebut saja derajat keanggotaan itu adalah u(x) untuk x adalah jumlah kendaraan. Derajat keanggotaan tersebut mempunyai nilai yang bergradasi sehingga mengurangi lonjakan pada sistem.
Sistem pengendalian fuzzy yang dirancang mempunyai dua masukan dan satu keluaran. Masukan adalah jumlah kendaraan pada suatu jalur yang sedang diatur dan jumlah kendaraan pada jalur Iain, dan keluaran berupa lama nyala lampu hijau pada jalur yang diatur. Penggunaan dua masukan dimaksudkan supaya sistem tidak hanya memperhatikan sebaran kendaraan pada jalur yang sedang diatur saja, tetapi juga memperhitungkan kondisi jalur yang sedang menunggu. Pencuplikan dilakukan pada setiap putafan (lewat 4 sensor yang dipasang pada semua jalur). Satu putaran dianggap selesai apabila semua jalur telah mendapat pelayanan lampu.
Tujuan dan Manfaat Penelitian
Adapun tujuan penelitian ini adalah:
1. Merancang dan membuat miniatur lampu lalu lintas pintar sistem fuzzy
logic berbasis mikrokontroler AT89S1 yang dapat menyesuaikan waktu
merah, kuning, dan hijau sesuai dengan perubahan panjang antrian dijalur persimpangan jalan raya.
2. Mengaplikasikan sistem fuzzy logic pada perancangan miniatur lampu lalu lintas pintar berbasis mikrokontroler AT89S51 untuk dapat mengendus panjang antrian kendaraan dijalur persimpangan jalan raya. 3. Menerapkan metal detektor dan sebagai sensor pendeteksi panjang
antrian kendaraan dijalur persimpangan jalan raya.
Metode Penelitian
Metode penelitian yang dilakukan adalah pengamatan langsung ke alat yang dirancang bangun. Alat yang dirancang bangun dikerjakan dilaboratorium dan workshop elektronika Politeknik Santo Thomas dengan cara melakukan tahapan pemilihan dan penentuan komponen/ bahan yang dipakai, perakitan, pengujian, dan pengukuran. Alat yang sudah selesai dirancang bangun diuji coba untuk diamati bagaimana pengaruh perubahan panjang antrian disetiap jalur terhadap waktu tunda hidup lampu merah, kuning, dan hijau. Hasil pengujian dan pengamatan dianalisis untuk dapat dibuat kesimpulan dan saran.
Diagram Blok Perancangan
Blok diagram sistem pengaturan lampu lalu lintas dengan pengendali logika fuzzy berbasis Mikrokontroler AT89S51 ini secara lengkap ditunjukkan pada gambar 4.
Gambar 4. Diagram Blok Sistem Pengaturan Lampu Lalu Lintas
kendaraan. Derajat keanggotaan tersebut mempunyai nilai yang bergradasi sehingga mengurangi lonjakan pada sistem.
Sistem pengendalian fuzzy yang dirancang mempunyai dua masukan dan satu keluaran. Masukan adalah jumlah kendaraan pada suatu jalur yang sedang diatur dan jumlah kendaraan pada jalur lain, dan keluaran berupa lama nyala lampu hijau pada jalur yang diatur.
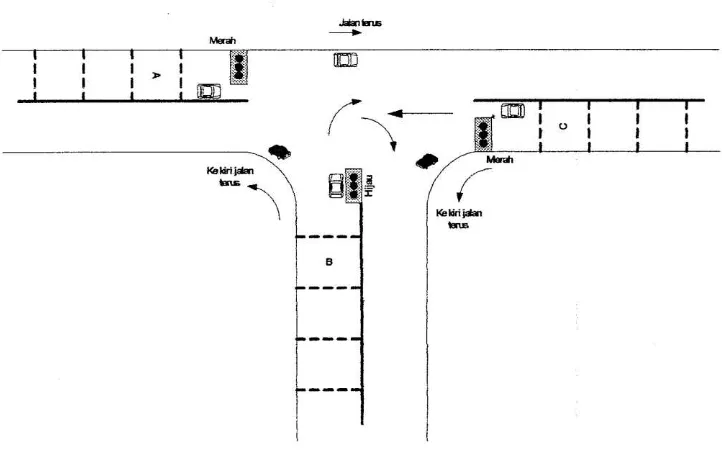
1. Perancangan Jalur Lalu Lintas
Perancangan yang dibuat ini adalah persimpangan 3 (tiga) seperti pada gambar 5, dimana setiap waktu ada satu jalur yang diperbolehkan melintas. Misal pada saat jalur A dan C berhenti (merah), maka jalur B dapat berjalan (hijau).
Pada realisasi penggunaan lampu lalu lintas setiap persimpangan yang menggunakan lampu lalu lintas setiap tanda yang diberikan oleh rambu ini seperti hijau, kuning, dan merah memiliki durasi yang berbeda-beda sesuai dengan kepadatan lalu lintas pada jalur. Pada perancangan ini dirancang pengontrol lampu lalu lintas dimana lampu merah ini akan bekerja dengan sinyal data yang diberikan oleh metal detektor ke mikrokontroler yang akan bekerja sendiri (automatis).
Pada perancangan ini lampu lalu lintas ini tentunya untuk meletakkan sensor di dalam tanah dan jarak antara sensor sangatlah penting. Kedalaman sensor yang dimasukkan ke dalam tanah tentunya berdasarkan spesilikasi dari sensor tersebut (ditentukan berapa jauh kemampuan sensor untuk mendeteksi benda metal). Sedangkan untuk jarak antar sensor juga ditentukan oleh panjangnya jalan pada masing-masing jalan dipersimpangan tersebut. Untuk menentukan hal-hal tersebut diatas tentunya oleh orang yang berkompeten dalam urusan jalan tersebut.
Gambar 4.2. Perancangan Denah Jalur Lalu Lintas
Perancangan Perangkat Keras
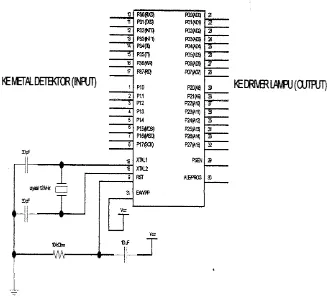
Rangkaian Sistem Minimum Mikrokontroler
Digunakan mikrokontroler AT89S51 karena sistem minimum mikrokontroler ini sangat sederhana. Internal flash PEROM 4 Kbyte membuat rangkaian sistem minimum menjadi sederhana, dan tidak memerlukan chip pendukung sama sekali. Jumlah dari portnya memadai untuk merealisasikan perancangan. Rangkaian sistem minimumnya dapat dilihat pada gambar 6.
Gambar 6. Rangkaian Minimum Sistem Mikrokontroler AT89S51
Kristal 12 MHz dan Kapasitor C1 dan C2 membentuk osilator pembangkit
frekuensi kerja AT89S51. Rangkaian merupakan rangkaian baku, artinya osilator selalu seperti ini untuk semua rangkaian AT89S51, kecuali untuk keperluan yang lain nilai kristalnya saja yang berbeda.
Kombinasi C3 dan tahanan R juga merupakan rangkaian baku, komponen
ini dipakai untuk membentuk rangkaian "power on reset", artinya rangkaian yang akan otomatis mereset AT89S51 setiap kali mulai menerima sumber daya listrik. Agar rangkaian mikrokontroler akan direset sewaktu dihidupkan, sehingga mikrokontroler akan selalu menjalankan program dari alamat 0000H. Lama waktu
reset dapat dihitung dengan menggunakan persamaan : t = 0.7 x R x C
t = (0.7) (10x103) (10 x l0-6) t = 0.07 s
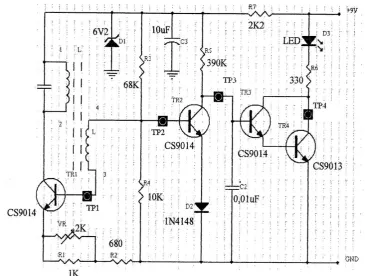
Metal Detektor
Metal detektor dirancang dengan cara menerapkan teori prinsip kerja transformator yaitu harus memiliki kumparan primer, sekunder, dan inti besi lunak. Jumlah lilitan kumparan primer sebanyak 65 lilitan dan kumparan sekunder 65 lilitan juga dimana diameter kabel Ø 0,25 mm dan koker Ø 10,48 mm. Didalam perancangan ini dibuat kumparan primer dan sekunder saja yang dililitkan pada koker. Intin kumparan dibuat dari kendaraan yang berada diatas kumparan in, bila ada kendaran maka terjadilah induksi tegangan dari kumparan primer ke sekunder dan tidak ada kendaraan diatas kumparan tersebut maka tidak ada induksi dari kumaran primer ke sekunder.
Kumparan primer dirangkai secara pararel dengan kapasitor yang berfungsi sebagai pembangkit sinyal osilasi. Sinyal osilasi yang belum mantap maka perlu diperkuat dengan menggunakan transistor CS9014. Sinyal osilasi yang telah diperkuat oleh transistor dikirim lagi ke kumparan primer untuk diinduksikan ke kumparan sekunder. Bentuk rangkaian yang dirancang seperti ditunjukkan pada gambar 7.
Gambar 7. Rangkaian Metal Detektor
Perancangan Perangkat Lunak
Sesuai dengan judul penulisan laporan penelitian yaitu pengontrolan automatis pengendali logika fuzzy berbasis mikrokontroler AT89S51 pada pengatur lampu lalu lintas, maka mikrokontroler juga akan dirancang untuk dapat menerima interupsi dari rangkaian metal detektor sebagai input, di mana data perintah yang diterima dari rangkaian tersebut akan diproses untuk dijadikan acuan pengaturan lalu lintas.
Untuk mempermudah perancangan, peneliti mencoba membuat diagram alir yang akan menggambarkan proses berjalan program yang dibuat, seperti pada gambar 8.
1
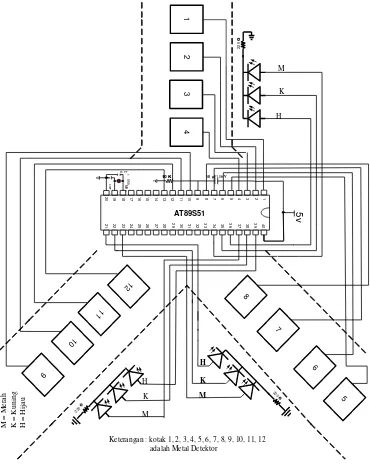
Rangkaian Lengkap Pengatur Lampu Lalu Lintas Dengan Menggunakan Logika Fuzzy Berbasis Mikrokontroler AT89S51
Keterangan : kotak 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12
adalah Metal Detektor
10 K 10 µF / 16 V
Rangkaian Lengkap
Rangkaian lengkap kendali lamu lalu lintas menggunakan metode logika fuzzy berbasis mikrokontroler AT89S51 seperti ditunjukkan pada gambar 9.
Rangkaian lengkap dari alat yang di buat peneliti seperti ditunjukkan pada gambar 4.8. Bahwa sinyal yang dikeluarkan oleh setiap sensor metal detektor dikirim ke port 1 dan 3 mikrokontroler. Sinyal yang diterima oleh mikrokontroler AT89S51 diproses dengan memperhatikan dari jalur mana yang lebih besar sinyal yang diterima dan hasil pemrosesannya dikeluarkan melalui port 2 dan 0. Sinyal bit yang keluar dari port 2 dan 0 diteruskan ke lampu led untuk menyatakan merah atau kuning atau hijau.
Kesimpulan
Setelah menyelesaikan rancang bangun dan analisis hasil alat Pengaturan Lampu Lalu Lintas Sistem Fuzzy Logic Berbasis Mikrokontroler AT89S51, maka dapat disimpulkan sebagai berikut
1. Pengendalian waktu hijau pada lampu lalu lintas sesuai dengan panjang antrian, bila panjang antriannya pendek maka waktu hijau singkat dan antrian panjang maka waktu hijaunya lama.
2. Penentuan waktu hijau maupun merah pada lampu lalu lintas disetiap jalur dapat disesuaikan secara otomatis sesuai dengan tingkat panjang antrian. 3. Metal detektor dapat bekerja untuk menginduksikan tegangan dari kumparan
primer ke sekunder bila ada logam ditempatkan didekat kumparan tersebut yang menjadi intinya.
Saran
Pengaturan Lampu Lalu lintas Sistem Fuzzy Logic Berbasis Mikrokontroler AT89S51 ini masih berbentuk miniature, karena itu penulis menyarankan selanjutnya:
1. diterapkan langsung ke sistem lalu lintas yang sebenarnya dalam penelitian berikutnya karena alat yang dirancang masih miniatur.
2. alat yang dirancang bangun dapat berfungsi dengan baik bila ukuran kendaraan sama, untuk kendaraan yang berbagai ukuran belum berfungsi alat ini dengan baik.
Daftar Pustaka
Barmawi Malvino. 1984. Prinsip-prinsip Elektronika. Erlangga, Jakarta. Erlangga.
B. Kosko, 1992. Neural Network and Fuzzy System, chapter 8, Prentice Hall. J. W. Lea, 1994. Sistem Pengaturan Lampu Lalulintas dengan Menggunakan
Teori Himpunan Fuzzy, September.
MacKenzie Scoot I. 1999, The 8051 Microcontroller, Third Edition, New Jersey Prentice-Hall, Inc.
Nalwan Andi Paulus. Teknik Antarmuka dan Pemograman Mikrokontroler
AT89C51. 2003. PT Gramedia, Jakarta.
L. Shrader Robert. 1991. Komunikasi Elektronika. Erlangga, Jakarta.
L, Tokheira Roger, 1995, Elektronika Digital, Edisi Kedua, Erlangga, Jakarta. S. Marsh et al., 1992. Fuzzy Logic Education Program, Center of Emerging
Sri Widodo Thomas, Dr. Ir. 2002. Elektronika Dasar. Erlangga, Jakarta. http//www.atmel.com/dyn/resources/prod_documents/doc2487, pdf
14 Agustus 2011
http://www.geocities.com/SiliconValley/Lakes/3947/SONY.HTML,pdf,
14 Agustus 2011
UCAPAN TERIMA KASIH
LAMPIRAN
PHOTO ALAT YANG DIRANCANG BANGUN
Gambar Lampu Hijau Hidup
Gambar Susunan Metal Dtektor dan Minimum Sistem Mikrokontroler