BAB 3
ANALISIS DAN PERANCANGAN
Bab ini membahas tentang data yang digunakan, penerapan algoritma dan analisis perancangan sistem terhadap implementasi algoritma Probabilistic Neural Network dalam melakukan proses penentuan lokasi parkir kosong. Tahapan yang dibahas pada bab ini ada dua, yaitu tahap analis dan tahap perancangan sistem. Adapun dalam tahap analis akan membahas mengenai analisis terhadap citra dan metode yang digunakan,
sedangkan pada tahap perancangan sistem akan membahas perancangan tampilan antarmuka.
3.1. Arsitektur Umum
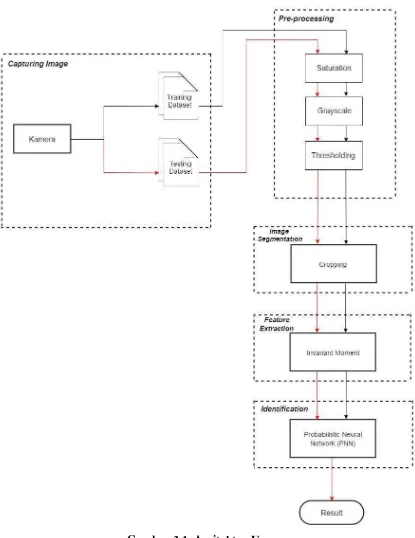
Metode yang diajukan penulis untuk menentukan lokasi parkir kosong terdiri dari beberapa proses. Adapan proses yang akan dilakukan adalah sebagai berikut: Citra akan di proses dari kamera yang diambil dari kamera DSLR yang kemudian akan memasuki proses pre-processing image. Dalam proses ini citra akan mengalami proses saturation, grayscale dan thresholding yang akan menghasilkan citra hitam dan putih dengan kontras yang lebih tajam untuk mempermudah sistem melakukan proses selanjutnya. Kemudian akan dilakukan proses cropping dimana setiap lokasi parkir mobil akan di potong sesuai dengan jumlah yang diinginkan. Proses selanjutnya adalah penerapan metode Probabilistic Neural Network (PNN) untuk mengenali lokasi mana sajakah yang sedang kosong atau terisi mobil dan hasil akhir akan menjadi lebih akurat dengan penerapan algoritma ini. Adapun arsitektur umum yang
Gambar 3.1. Arsitektur Umum
3.2. Data yang Digunakan
dengan intensitas cahaya yang memadai. Pada proses training dibutuhkan data citra untuk melatih sistem mengenali lokasi parkir yang kosong. Kemudian pada saat proses testing data yang digunakan adalah sebuah citra yang akan di identifikasi oleh sistem, dengan demikian akan diketahui lokasi parkir yang kosong atau terisi mobil. Citra diambil dengan menggunakan kamera Digital Single Lens Reflex (DSLR) yang memiliki format .jpg.
3.2.1. Capturing Image
Citra lokasi parkir yang digunakan untuk input adalah citra yang dapat menampung 5 jumlah mobil. Adapun input yang akan di proses pada tahap ini merupakan citra yang diambil dari kamera DSLR dan sistem secara otomatis menangkap citra setiap sekitar 30 detik sekali untuk diproses ke tahap selanjutnya.
3.2.2. Data training
Data training pada penelitian ini dibagi menjadi 2, yaitu data training parkir penuh dengan kondisi terisi mobil pada setiap slot parkir yang ada dan data training parkir kosong dengan kondisi tidak terisi mobil pada setiap slot parkir. Data tersebut akan disimpan ke dalam database untuk mempermudah sistem. Adapun jumlah data training parkir penuh adalah 40 citra yang setiap citra dibagi menjadi 5 data training,
jadi jumlah nya adalah 200 data training. Sedangkan untuk data training parkir kosong
terdiri dari 20 citra dengan jumlah 100 data training. Contoh data training yang digunakan dapat dilihat pada Gambar 3.2.
(B)
Gambar 3.2. Data Training (A) Data Training Terisi Penuh (B) Data Training
Kosong
3.2.3. Data testing
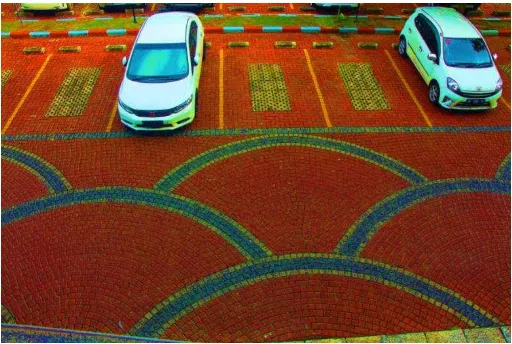
Data testing merupakan data yang digunakan untuk menguji sistem, dengan adanya data testing sistem dapat mengenali kondisi lokasi terisi atau penuh dengan membandingkan dengan data training. Data yang digunakan diambil dari kamera DSLR dengan posisi pengambilan tertentu yang akan menghasilkan citra yang dapat
di proses ke tahap selanjutnya. Contoh data testing dapat dilihat pada Gambar 3.3.
Gambar 3.3. Data Testing
3.3. Pre-processing
Pre-processing image adalah tahapan awal dalam penelitian ini. Tahap ini bertujuan
diproses lebih lanjut. Adapun tahapan dalam pre-processing image terdiri dari proses saturation, grayscale dan thresholding.
3.3.1. Saturation
Pada proses saturation, citra akan diubah menjadi lebih terang dan dipertajam untuk mendapatkan hasil yang maksimal. Setelah melalui tahap ini warna citra akan di dominasi oleh warna orange dan citra lebih terlihat lebih jelas. Gambar 3.4 akan menunjukan proses saturation.
Gambar 3.4. Proses Saturation Citra
3.3.2. Grayscale
Proses grayscale merupakan proses merubah warna red, green, blue (RGB) menjadi graylevel. Proses ini digunakan untuk mempermudah sistem mengetahui nilai citra
serta untuk mempermudah ke proses selanjutnya yaitu thresholding. Proses grayscale pada penelitian ini dapat dilihat pada Gambar 3.5.
3.3.3. Thresholding
Setelah citra melalui proses grayscale maka selanjutnya citra akan memasuki proses thresholding yang akan merubah warna citra menjadi hitam dan putih dengan kualitas
citra lebih tajam. Gambar 3.6 merupakan contoh thresholding.
Gambar 3.6. Proses Thresholding Citra
3.4. Image Segmentation
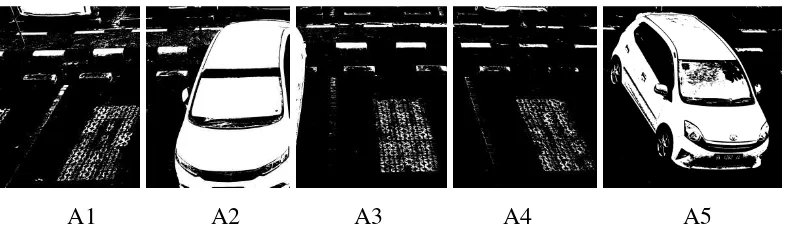
Image Segmentation yaitu proses yang dilakukan untuk memotong citra menjadi beberapa bagian sesuai dengan jumlah lokasi parkir yang ada untuk mempermudah sistem melakukan deteksi lokasi parkir kosong. Citra akan diproses sesuai dengan setiap potongan yang ada. Dalam penelitian ini terdapat lima potongan citra yang menandakan lokasi parkir dapat menampung lima mobil pada setiap potongan. Setiap slot parkir disimbolkan dengan A1, A2, A3, A4, dan A5 untuk mempermudah sistem
mengenali slot parkir yang ada. Berikut merupakan contoh citra pada saat proses cropping yang dapat dilihat di Gambar 3.7 dan Gambar 3.8 serta untuk ukuran setiap
Gambar 3.7. Proses Cropping pada Citra Utuh
A1 A2 A3 A4 A5 Gambar 3.8. Hasil Proses Cropping
Setiap slot parkir yang ada memiliki ukuran yang berbeda, ukuran dari setiap slot dapat dilihat pada Tabel 3.1.
Tabel 3.1. Daftar Ukuran Slot Citra Parkir
Parkir Ukuran
A1 1000 x 1200 piksel A2 950 x 1200 piksel
A3 1000 x 1200 piksel
A4 950 x 1200 piksel
A5 1184 x 1200 piksel
3.5. Feature Extraction
metode invariant moment. Untuk mendapatkan nilai dari metode ini adalah dengan menghitung nilai moment. Kemudian moment akan dihitung dengan menggunakan persamaan 2.13.
Nilai moment dari Gambar 3.8 dapat dilihat pada Tabel 3.2 :
Tabel 3.2. Hasil Perhitungan Matriks Citra
A1 2.9418585E7 1.3371697395E10 1.668511614E10 A2 1.55647665E8 1.03130162805E11 9.282440946E10 A3 2.7319935E7 1.420585977E10 1.2822189225E10 A4 1.4911125E7 7.444228515E9 7.695790605E9 A5 1.31097285E8 7.1011329765E10 7.781752992E10
Setelah nilai dari , dan di dapat, maka proses selanjutnya adalah
menghitung nilai moment dengan persamaan 2.14 dan 2.15. Adapun nilai yang diperoleh adalah :
Tabel 3.3. Hasil Perhitungan Nilai Moment Pusat
x y
Setelah proses diatas akan menghasilkan nilai :
Tabel 3.4. Hasil Perhitungan Nilai Moment Dimensi Citra A1 A1
Tabel 3.5. Hasil Perhitungan Nilai Moment Dimensi Citra A2 A2
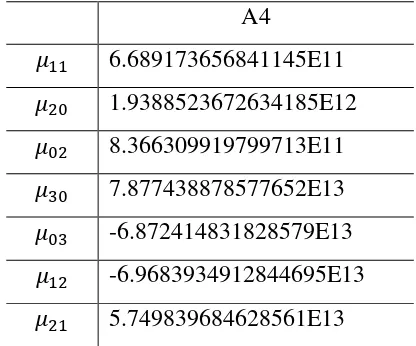
Tabel 3.7. Hasil Perhitungan Nilai Moment Dimensi Citra A4
Tabel 3.8. Hasil Perhitungan Nilai Moment Dimensi Citra A5 A5 kemudian proses selanjutnya adalah normalisasi nilai momentdengan persamaan 2.16
dan 2.17. Dari persamaan tersebut maka akan diperoleh nilai :
Tabel 3.10. Hasil Perhitungan Nilai Normalisasi Moment Pusat Citra A2
Tabel 3.11. Hasil Perhitungan Nilai Normalisasi Moment Pusat Citra A3 A3
Tabel 3.13. Hasil Perhitungan Nilai Normalisasi Moment Pusat Citra A5
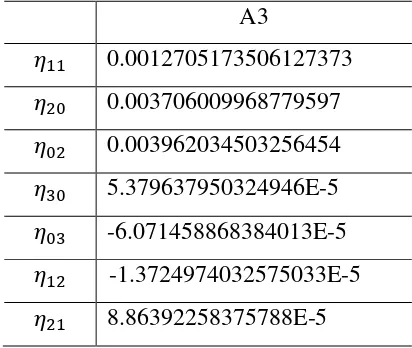
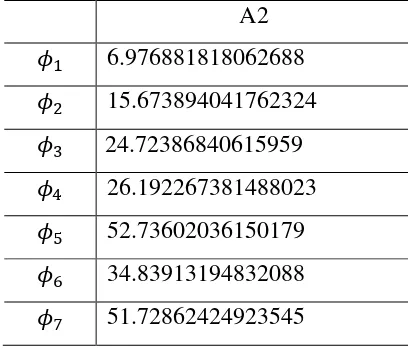
Tahap terakhir untuk memperoleh nilai dari invariant moment pada setiap citra dilakukan dengan menghitung nilai �. Setelah nilai dari � diperoleh, maka nilai
tersebut akan di definisikan |log |�| |. Nilai tujuh invariant moment dari citra adalah sebagai berikut:
Tabel 3.14. Hasil Perhitungan Nilai Invariant Moment Citra A1 A1
Tabel 3.16. Hasil Perhitungan Nilai Invariant Moment Citra A3
Tabel 3.17. Hasil Perhitungan Nilai Invariant Moment Citra A4 A4
3.6. Identification
3.6.1. Probabilistic Neural Network
Tahap selanjutnya setelah didapatkan nilai dari feature extraction adalah memasukkan nilai moment tersebut sebagai nilai input pada proses Neural Network. Pada proses PNN ini, nilai invariant moment dari data testing akan akan dibandingkan dengan nilai invariant moment dari data training yang sudah terlebih dahulu disimpan di dalam
database sehingga memudahkan sistem untuk mengenali citra kosong atau terisi.
Hasil dari proses tersebut akan mendapatkan nilai fA(X) yang berarti penjumlahan sederhana dari distribusi Gaussian multivariasi yang kecil yang terpusat pada setiap sampel pelatihan. Adapun hasil dari proses Probabilistic Neural Network menggunakan persamaan 2.26 dijelaskan pada Tabel 3.19.
Tabel 3.19. Hasil Perhitungan PNN
fA1(X) fA2(X)
A1 0.08401280201949875 0.02008791568259274 A2 0.005238101117113212 0.06519267004372732 A3 0.2080114173113885 0.004332461049073639 A4 0.07514096345071161 7.535308523203227E-4 A5 0.0449541439713515 0.1895348189567271
Dimana : fA1(X) : hasil perhitungan PNN citra terisi fA2(X) : hasil perhitungan PNN citra kosong
Maka dari hasil tersebut, akan dibandingkan nilai antara fA1(X) dan fA2(X). Jika nilai fA1(X) lebih besar dari fA2(X) maka citra akan terdeteksi terisi mobil , jika nilai fA1(X) lebih kecil dari fA2(X) maka citra akan terdeteksi kosong.
3.7. Perancangan Sistem
3.7.1.Tampilan Utama
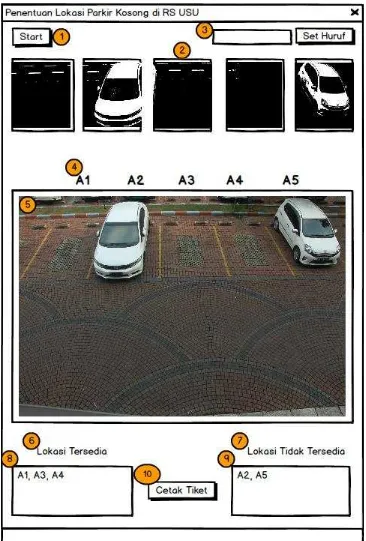
Gambar 3.9. Rancangan Sistem Tampilan Utama
pengguna agar dapat mengetahui lokasi yang kosong dan yang sedang terisi mobil. Di setiap lokasi parkir yang ada ditandai dengan kode A ataupun B untuk mempermudah pengunjung yang datang. Berikut merupakan penjelasan dari Gambar 3.9 :
1. Tombol start digunakan untuk memulai sistem
2. Menampilkan hasil thresholding citra dari setiap slot parkir yang ada 3. Kolom untuk input huruf sebagai informasi yang akan ditampilkan 4. Text untuk menandakan slot parkir A1, A2, A3, A4, A5
5. Merupakan tampilan utama yang menampilkan lokasi parkir Rumah Sakit Universitas Sumatera Utara secara real-time. Lokasi tersebut terletak di depan Rumah Sakit dan dalam penelitian ini tersedia 5 slot parkir.
6. Lokasi tersedia berfungsi untuk menginfokan tentang lokasi parkir yang masih tersedia agar pengunjung dapat parkir di tempat tersebut.
7. Lokasi tidak tersedia berfungsi untuk menginfokan tentang lokasi parkir yang sudah terisi mobil dan pengunjung tidak dapat parkir di lokasi tersebut.
8. Kolom untuk menampilkan lokasi mana saja yang tersedia/kosong. 9. Kolom untuk menampilkan lokasi mana saja yang sudah terisi mobil.
10. Tombol cetak tiket berfungsi untuk mencetak tiket parkir bagi pengunjung yang akan memarkirkan kendaraan nya di Rumah Sakit Universitas Sumatera Utara, dengan menekan tombol ini akan muncul tab baru untuk menampilkan form tiket.
3.7.2. Tiket Parkir
Gambar 3.10 menyatakan bahwa setiap pengunjung yang akan masuk ke Rumah Sakit Universitas Sumatera Utara akan mendapat tiket parkir seperti gambar di atas. Terdapat 5 buah informasi yang ada di dalam tiket parkir ini, berikut ini penjelasannya:
1. Merupakan header dari tiket parkir yang berisi info nama rumah sakit dan alamat rumah sakit.
2. Akan menampilkan kode unik dari sistem untuk penanda setiap kendaraan yang masuk.
3. Tanggal masuk akan menampilkan sesuai dengan tanggal pengunjung masuk ke Rumah Sakit Universitas Sumatera Utara.
4. Kolom ini akan menampilkan waktu yang sesuai dengan pengunjung memasuki lokasi parkir.
5. Menampilkan lokasi parkir mana saja yang tersedia dengan berupa kode disetiap lokasi parkir agar memudahkan pengunjung langsung memarkirkan kendaraannya di lokasi tersebut.
6. Total lokasi parkir yang tersedia akan ditampilkan di kolom ini.
3.7.3. Pengaturan Data Latih
Gambar 3.11. Rancangan Pengaturan Data Latih
1. Merupakan tombol untuk membuka file yang akan dijadikan sebagai data latih parkir kosong ataupun parkir terisi.
2. Tombol ini berfungsi untuk menetapkan citra sebagai data latih parkir kosong. 3. Berfungsi untuk menghapus semua data latih parkir kosong yang telah di
input.
4. Merupakan tombol untuk menetapkan citra sebagai data latih parkir penuh. 5. Berfungsi untuk menghapus semua data latih parkir penuh yang telah di input.
3.7.4. Flowchart pengunjung
Gambar 3.12. Flowchart Pengunjung
BAB 4
IMPLEMENTASI DAN PENGUJIAN
Bab ini membahas hasil yang didapatkan dari penelitian yang sudah dilakukan, yang terdiri dari tahap pre-processing, training dan testing dari implementasi algoritma Probabilistic Neural Network dalam melakukan identifikasi lokasi parkir kosong yang
telah dibahas pada Bab 3.
4.1. Spesifikasi Perangkat Keras dan Perangkat Lunak
Spesifikasi perangkat keras yang digunakan dalam penelitian ini adalah sebagai berikut :
1. Prosesor Intel® Core™ i5-3210M CPU @ 2.50 GHz. 2. Kapasitas harddisk sebesar 500 GB.
3. Memori RAM yang digunakan 4 GB
Spesifikasi perangkat lunak yang digunakan dalam penelitian ini adalah sebagai berikut :
1. Sistem operasi yang digunakan adalah Windows 7 Ultimate 64-bit 2. Netbeans IDE 8.0.2
3. Aplikasi digiCam Control 4. JDK 1.8.0
5. Sqlite-jdbc-3.8.11
4.2. Implementasi Perancangan Antarmuka
4.2.1. Halaman Utama
Pada Gambar 4.1 menampilkan halaman utama dari sistem yang telah dibuat, halaman ini muncul ketika pertama kali sistem dijalankan. Di halaman ini terdapat 2 tombol utama, yaitu tombol start untuk memulai proses deteksi lokasi parkir dan tombol cetak tiket untuk menampilkan form tiket sebagai informasi ke pengunjung Rumah Sakit.
Gambar 4.1. Halaman Utama 4.2.2. Tampilan hasil akhir
Gambar 4.2. Tampilan Hasil Akhir 4.2.3. Form tiket
Halaman ini menampilkan form tiket untuk pengunjung yang berisi kode, tanggal masuk, waktu, parkir tersedia dan total tersedia. Dengan adanya informasi tentang slot
parkir tersedia maka akan mempermudah pengunjung untuk langsung memarkirkan kendaraannya di lokasi tersebut.
Gambar 4.3. Form Tiket 4.2.4. Halaman Pengaturan Data Latih
parkir kosong dan data parkir penuh yang dapat mempermudah sistem untuk menentukan lokasi tersebut terisi atau kosong. Pada halaman ini juga terdapat tombol reset untuk menghapus semua data yang telah di input ke sistem. Adapun citra yang
telah di input akan disimpan ke dalam database sehingga akan mempermudah sistem ketika melakukan testing dataset.
Gambar 4.4. Halaman Input Citra Data Latih
4.3. Hasil Pre-processing
Bagian ini dijelaskan hasil yang telah diperoleh dari tahap pre-processing. Hasil yang telah didapat terdiri dari beberapa tahapan, yaitu saturation (mengubah citra RGB menjadi lebih terang dan tajam), Grayscale (merubah citra RGB menjadi citra keabuan) dan thresholding (merubah citra keabuan menjadi citra hitam putih. Hasil dari tahap pre-processing dapat dilihat pada Tabel 4.1.
Tabel 4.1. Contoh Hasil Pre-processing
No Citra Awal Saturation Grayscale Threshold
1
4.4. Hasil Cropping
Setelah memalui proses pre-processing, tahap selanjutnya adalah proses cropping untuk memisahkan citra menjadi 5 bagian yaitu A1, A2, A3, A4 dan A5. Hasil dari proses cropping dapat dilihat pada tabel 4.2.
Tabel 4.2. Contoh Hasil Proses Cropping
No Citra Awal A1 A2 A3 A4 A5
1
2
4.5. Hasil Feature Extraction
Setelah melalui proses cropping, tahap selanjutnya adalah feature extraction untuk mendapatkan nilai invariant moment yang dapat digunakan untuk mendapatkan nilai
dari Probabilistic Neural Network (PNN). Untuk mendapatkan nilai moment pada penelitian ini menggunakan persamaan 2.13.
Tabel 4.3. Contoh Hasil Feature Extraction Data Uji
No Data Latih A1 A2 A3 A4 A5
1 Citra 1 4.098491- 6.278307- 7.042961- 6.739016- 6.733052-
9.943201- 14.03941- 16.08176- 15.40898- 14.71975-
13.41766- 20.89642- 2.898760- 22.96087- 22.70909-
13.56476- 21.55843- 23.54267- 24.08324- 22.49110-
28.10616- 46.06057- 48.07092- 51.01975- 45.52590-
18.98785- 29.90284- 31.75497- 32.85426- 30.22043- 27.15183- 43.46281- 48.18759- 48.50312- 47.49174-
2 Citra 2 4.150035- 7.020285- 4.302159- 7.135532- 6.925294-
No Data Latih A1 A2 A3 A4 A5 14.91458- 25.98118- 13.88963- 27.38016- 26.59883-
15.39846- 27.79769- 14.81558- 30.49893- 27.18049-
31.95044- 54.06376- 29.92412- 58.14706- 54.70863-
21.97107- 36.96119- 22.21188- 39.90304- 35.72072- 29.89001- 54.87469- 28.80134- 60.41348- 53.67035-
Tabel 4.4. Contoh Hasil Feature Extraction Data Latih No Data
4.6. Hasil Probabilistic Neural Network (PNN)
akan menghasilkan 7 nilai. Setelah nilai dari invariant moment didapat, akan dilakukan proses selanjutnya menggunakan algoritma Probabilistic Neural Network untuk mendapatkan hasil yang lebih akurat. Hasil dari pengujian ini dapat dilihat pada Tabel 4.5.
Tabel 4.5. Hasil Deteksi Lokasi Parkir Menggunakan Algoritma PNN
No Citra Cropping fA1(X) fA2(X) Hasil
1 Citra 1 0.926331639690496 1.2343760328414248 Benar
4.976616402960417 0.7629464782582842 Benar
5.208034812772013 0.49019340817253765 Benar
6.167030725944883 0.303474738207344 Benar
4.697809560798862 0.33618741422252224 Benar
2 Citra 2 1.4218903890095156 1.6121673835808945 Benar
4.685449454216543 0.1588510446521784 Benar
No Citra Cropping fA1(X) fA2(X) Hasil
3.0696034739316334 0.09565226364496873 Benar
4.039088705028239 0.18366371256859812 Benar
…. ……. ………… ……… ………. ………..
19 Citra 19 5.126459597170545 0.5846024747078946 Benar
0.4076387301763532 1.6008599016254845 Benar
5.499073918738006 0.5074728466816005 Benar
5.113764606519538 0.5276056890456264 Benar
4.8519569913369995 0.1120033629225248 Benar
20 Citra 20
0.9402151459336704 1.3637315292919372 Salah
Dimana : fA1(X) : hasil perhitungan PNN citra terisi fA2(X) : hasil perhitungan PNN citra kosong
Maka dari hasil tersebut, akan dibandingkan nilai antara fA1(X) dan fA2(X). Jika nilai fA1(X) lebih besar dari fA2(X) maka citra akan terdeteksi terisi mobil , jika nilai fA1(X) lebih kecil dari fA2(X) maka citra akan terdeteksi kosong.
Pada penelitian ini, nilai Gaussian yang digunakan adalah 0.9 karena merupakan nilai yang paling akurat berdasarkan hasil pengujian. Hasil dari pengujian sistem yang telah dilakukan diperoleh nilai akurasi dengan menghitung jumlah data uji yang benar dibagi dengan jumlah keseluruhan data uji dikali dengan 100%. Maka diperoleh akurasi sebesar 94%.
Persentase Akurasi = Jumlah keseluruhan data ujiJumlah data uji benar × 100%
= 10094 × 100%
= 94 %
4.7.Analisis Precision dan Recall
Pada pattern recognition dan information retrieval, precision dan recall adalah dua
perhitungan yang banyak digunakan untuk mengukur kerja dari sistem yang digunakan. Precision merupakan tingkat ketepatan antara informasi yang diminta oleh
pengguna dengan jawaban yang diberikan sistem. Recall adalah tingkat keberhasilan
No Citra Cropping fA1(X) fA2(X) Hasil
0.734514022314506 1.506906181822697 Benar
0.1570968231145728 1.2938479988939489 Benar
sistem dalam menemukan kembali sebuah informasi. Precicion dan recall pada penelitian ini digunakan untuk mengukur kinerja algoritma Probabilistic Neural Network (PNN) yang berfungsi untuk menentukan lokasi parkir kosong atau terisi
mobil. Untuk menguji sistem digunakan 100 data yang merupakan citra dari lokasi parkir yang diambil dari Rumah Sakit Universitas Sumatera Utara.
Tabel 4.6. Analisis Hasil Penelusuran
No Relevan c : Missed (dokumen relevan yang tidak ditemukan)
Berdasarkan Tabel 4.6 nilai recall adalah 94% dan nilai precision adalah 94%. Efektifitas dibedakan menjadi dua bagian, yakni efektif jika nilai di atas 50% dan
BAB 5
KESIMPULAN DAN SARAN
Pada bab ini dijelaskan kesimpulan yang didapat dari hasil implementasi algoritma Probabilistic Neural Network (PNN) pada proses deteksi lokasi parkir kosong di
Rumah Sakit Universitas Sumatera Utara, beserta saran-saran yang dapat digunakan sebagai bahan pertimbangan untuk pengembangan ataupun riset selanjutnya.
5.1. Kesimpulan
Berdasarkan hasil penelitian yang dilakukan, maka dapat diambil kesimpulan bahwa algoritma Probabilistic Neural Network (PNN) dapat mendeteksi lokasi parkir kosong atau terisi mobil secara real-time sesuai dengan target yang telah ditentukan. Hal tersebut didukung oleh tingkat akurasi yang mencapai 94%. Adapun hal yang mempengaruhi keberhasilan penelitian ini adalah intensitas cahaya, dengan adanya tingkat intensitas cahaya matahari yang cukup sangat membantu untuk mempermudah sistem mendeteksi lokasi parkir tersebut kosong atau sedang terisi mobil. Sedangkan
jika penelitian dilakukan pada malam hari, sistem ini akan mengandalkan cahaya lampu yang ada. Dengan intensitas cahaya yang terlalu terang atau terlalu rendah juga akan mempengaruhi sistem untuk melakukan proses deteksi. Kemudian tingkat kerapatan citra atau piksel juga akan mempengaruhi keberhasilan sistem. Dari penelitian ini juga dapat disimpulkan bahwa warna mobil mempengaruhi tingkat keberhasilan, semakin gelap warna mobil yang dideteksi maka akan semakin besar resiko kegagalan dari sistem.
5.2. Saran
Berdasarkan penelitian yang telah dilakukan, maka terdapat beberapa saran sebagai berikut:
2. Dapat menggunakan ekstraksi fitur berdasarkan bentuk untuk mendapatkan hasil yang maksimal.