Aplikasi Sensor Pada Sistem
Telemetri Multitone
TUGAS AKHIR
Diajukan untuk Memenuhi Salah Satu Syarat Memperoleh Gelar Sarjana Teknik
Program Studi Teknik Elektro
Disusun oleh :
I Putu Eka Putra Wiantara NIM : 035114040
PROGRAM STUDI TEKNIK ELEKTRO
JURUSAN TEKNIK ELEKTRO
FAKULTAS SAINS DAN TEKNOLOGI
UNIVERSITAS SANATA DHARMA
YOGYAKARTA
Sensor Aplication Of Multitone
Telemetry System
FINAL PROJECT
Presented as Partial Fulfillment of the Requirements to Obtain the SARJANA TEKNIK Degree
in Electrical Engineering
by:
I Putu Eka Putra Wiantara Student number : 035114040
STUDY PROGRAM OF ELECTRICAL ENGINEERING
ELECTRICAL ENGINEERING DEPARTMENT
SCIENCE AND TECHNOLOGY FACULTY
SANATA DHARMA UNIVERSITY
YOGYAKARTA
LEMBAR PENGESAHAN OLEII PEMBIMBING
TUGAS AKHIR
Apilikasi Scnsor Pada Sistem
Telemetri Multitone
disuzun oleh
Pembimbing II
LEMBAR PENGESAHAN OLEH PENGUJI
TUGASAKHIR
APLIKASI SENSOR PADA SISTf,M TELEMETRI
MT]LTITONE
Oleh:
I Putu Eka
Wiantara
: B. Wuri Harini, S.T., M.T.
Febnrari 2009
Ketua
Anggota
Anggota
Anggota
vl 67
tb
Yoryakarta Februari2009
Fakultas
Sains
dan Teknologi
Dharma
Teknologi
dffi3
3"firy**, s.rf,ra.eng.
,.d ,
PERNYATAAN KEASLIAN KARYA
Saya menyatakan dengan sesungguhnya bahwa tugas akhir yang saya tulis ini tidak memuat karya atau bagian karya orang lain, kecuali yang telah disebutkan dalam kutipan dan daftar pustaka, sebagaimana layaknya karya ilmiah.
Yogyakarta, 31 Desember 2008
Penulis
HALAMAN MOTTO dan PERSEMBAHAN
Motto:
Hidup Adalah Sebuah Pilihan
Persembahan:
Pada Ida Sang Hyang Widhi Wasa atas asung kerta wara nugraha-Nya sehingga karya tulis ini bisa saya selesaikan tepat waktu.
Untuk yang tercinta kedua orang tuaku Nyoman Winten dan Ketut Wariati yang telah memberikan cinta kasih sayangnya, yang tidak pernah lelah memberikan dorongannya, nasehat dan biaya untuk menyelesaikan kuliah ini. Serta ketiga adikku yang jail-jail, Kadek Hery Budi Adnyana, Komang Hera Budi Sukrantara dan Ketut Vera Budi Lesmana.
LEMBAR PERNYATAAN PERSETUJUAN
PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS
Yang bertanda tangan di bawah ini, saya mahasiswa Universitas Sanata Dharma :
Nama : I Putu Eka Putra Wiantara
Nomor Mahasiswa : 035114040
Demi pengembangan ilmu pengetahuan, saya memberikan kepada Perpustakaan Universitas Sanata Dharma karya ilmiah saya yang berjudul :
APLIKASI SENSOR PADA SISTEM TELEMETRI MULTITONE
beserta perangkat yang diperlukan (bila ada). Dengan demikian saya memberikan kepada Perpustakaan Universitas Sanata Dharma hak untuk menyimpan, mengalihkan dalam bentuk media lain, mengelolanya dalam bentuk pangkalan data, mendistribusikan secara terbatas dan mempublikasikannya di internet atau media lain untuk kepentingan akademis tanpa perlu meminta ijin dari saya maupun memberikan royalti kepada saya selama tetap mencantumkan nama saya sebagai penulis.
Demikian pernyataan ini yang saya buat dengan sebenarnya. Dibuat di Yogyakarta
Pada tanggal : 24 Februari 2009
Yang menyatakan
Intisari
Aplikasi sensor pada sistem telemetri multitone adalah sistem pendukung dari sistem yang lebih besar yaitu sistem telemetri multitone yang merupakan alat ukur dengan tiga sinyal data pengukuran, yaitu data pengukuran suhu udara, tekanan udara dan kelembaban udara, dengan sistem komunikasi gelombang radio FM.
Aplikasi sensor pada sistem telemetri multitone ini, terdiri dari bagian sensor, pengondisi sinyal, VCO dan penjumlah sinyal. Untuk mengukur suhu menggunakan sensor LM335, tekanan udara menggunakan sensor MPX4100 dan kelembaban udara menggunakan sensor HS-15. Masing-masing sensor akan mendeteksi keadaan sekitar dan mengubahnya dari besaran fisik menjadi tegangan. Tegangan ini akan dikondisikan oleh pengondisi sinyal agar bisa dipakai sebagai tegangan kendali dari VCO. Frekuensi keluaran untuk pengukuran suhu memiliki rentang dari 2kHz sampai 7kHz, pengukuran tekanan dari 8kHz sampai 13kHz dan pengukuran kelembaban dari 14kHz sampai 19kHz. Frekuensi keluaran dari masing-masing VCO akan dijumlahkan untuk dipancarkan oleh pemancar FM.
Abstract
Sensor application of multi tone telemetry system is a support system to measure instrument atmospheric temperature, atmospheric pressure and atmospheric humidity that were transmitted trough radio communication system.
This sensor application consist of sensor, signal conditioning, voltage controller oscillator (VCO) and signals adder. Measuring for atmospheric temperature using LM335, atmospheric pressure using MPX4100 and atmospheric humidity using HS-15P. Each sensor will detect its around condition then convert physical quantity to voltage level. Signal conditioning will modify sensor output for control voltage at VCO to generate frequency. The frequency atmospheric temperature are 2kHz-7kHz, atmospheric pressure are 8kHz-13kHz and atmospheric humidity are 14kHz-19kHz. This frequency will be added by signals adder and transmitted by FM transmitter.
KATA PENGANTAR
Puji dan syukur penulis panjatkan kepada Ida Sang Hyang Widhi Wasa atas asung kerta wara nugraha-Nya sehingga penulis dapat menyelesaikan tugas akhir yang berjudul “Aplikasi Sensor Pada Sistem Telemetri Multi tone”.
Tugas akhir ini disusun sebagai salah satu syarat untuk memperoleh gelar Sarjana Teknik Elektro di Fakultas Sains dan Teknologi Universitas Sanata Dharma sekaligus sebagai upaya untuk memperdalam dan memperkaya wawasan berpikir serta menambah wacana di bidang elektronika khususnya dan sains teknologi pada umumnya.
Pembuatan tugas akhir ini tidak terlepas dari bantuan dan bimbingan berbagai pihak, untuk itu penulis ingin mengucapkan terima kasih kepada :
1. B. Wuri Harini S.T., M.T Kepala Jurusan Teknik Elektro telah
memberikan perhatiannya selama kuliah di Universitas Sanata Dharma.
2. A. Bayu Primawan, S.T., M.Eng selaku dosen pembimbing I yang telah
memberikan bimbingan, masukan, waktu, dan perhatiannya selama penyusunan tugas akhir ini.
3. Martanto, S.T., M.T selaku dosen pembimbing II yang telah memberikan bimbingan, masukan, waktu, dan perhatiannya selama penyusunan tugas akhir ini.
4. Segenap dosen dan laboran Teknik Elektro Universitas Sanata Dharma. 5. Segenap karyawan sekretariat Fakultas Teknik.
6. Bapak, Ibu dan keluarga yang selalu memberi semangat supaya bisa cepat dalam menyelesaikan kuliah dan mengerjakan tugas akhir ini.
7. Luh Sari Yudarini yang selalu menjadi inspirasi dan semangat dalam
berkarya, juga orang yang sangat berarti dalam hidup ini
8. Sahabat, saudara, dan teman-temanku di kontrakan 120 C, yang selalu
bikin suasana ceria sehingga tidak kesepian.
10.Teman-teman TE angkatan 2003 atas dukungan dan kekompakannya. 11.Semua pihak yang telah membantu dan tidak dapat disebutkan satu persatu
sehingga skripsi ini dapat diselesaikan.
Penulis dengan penuh kesadaran memahami dalam pembuatan tugas akhir ini masih banyak terdapat kekurangannya. Oleh karenanya sumbang saran yang bersifat membangun dari pembaca sangat diharapkan. Akhirnya penulis berharap semoga tugas akhir ini dapat bermanfaat bagi pembaca khususnya dan dunia elektronika umumnya.
Yogyakarta, 31 Desember 2008. Penulis
DAFTAR ISI
HALAMAN JUDUL ... i
HALAMAN JUDUL DALAM BAHASA INGGRIS ... ii
LEMBAR PERSETUJUAN TUGAS AKHIR ... iii
LEMBAR PENGESAHAN TUGAS AKHIR ... iv
PERNYATAAN KEASLIAN KARYA ... v
HALAMAN MOTTO DAN PERSEMBAHAN ... vi
LEMBARA PERNYATAAN PERSETUJUAN PUBLIKASI KARYA ILMIAH UNTUK KEPENTINGAN AKADEMIS ... vii
INTISARI ... viii
ABSTRACT ... ix
KATA PENGANTAR ... x
DAFTAR ISI ... xii
DAFTAR GAMBAR ... xvi
DAFTAR TABEL ... xviii
DAFTAR GRAFIK ... xix
DAFTAR LAMPIRAN ... xxiii
BAB I PENDAHULUAN ... 1
1.1 Judul ... 1
1.2 Latar Belakang Masalah... 1
1.3 Tujuan Penelitian ... 2
1.4 Manfaat Penelitian ... 2
1.5 Batasan Masalah ... 3
1.6 Metodologi Penelitian ... 3
1.7 Sistematika Penulisan ... 4
BAB II DASAR TEORI ... 5
2.1 Sensor Suhu Elektronis ... 6
2.2 Sensor Tekanan Udara ... 7
2.3 Sensor Kelembaban (Relative Humididy HS-15P ... 10
2.4.1 Penyangga (Buffer) ... 12
2.4.2 Penguat Inverting ... 13
2.4.3 Penguat Non-Inverting ... 13
2.4.4 Penjumlah membalik N-masukan ... 14
2.4.5 Subtractor/Pengurang ... 15
2.5 Pengondisi Sinyal ... 16
2.6 VCO (Voltage Control Oscilator) ... 17
2.7 Pengikut dan Penyimpan Puncak Positif ... 18
2.8 Multivibrator Astabil ... 19
2.9. Osilator Gelombang Sinus ... 22
2.10 Karakteristik Alat Ukur ... 23
2.11 Jenis-jenis Kesalahan ... 25
2.12 Analisa Statistik ... 25
2.12.1 Nilai Rata-rata (Arithmetic Mean) ... 26
2.12.2 Penyimpangan Terhadap Nilai Rata-rata ... 26
2.12.3 Penyimpangan Rata-rata (Average Deviation) ... 27
2.12.4 Deviasi Standar ... 27
2.13 Regresi Linier ... 27
2.13.1 Kriteria Untuk Kecocokan Terbaik ... 28
2.13.2 Kecocokan Kuadrat Terkecil dari Garis Lurus ... 28
2.13.3 Pengukuran Galat Regresi Linier ... 29
BAB III PERANCANGAN ... 32
3.1 Pengukuran Suhu ... 32
3.1.1 Sensor Suhu (LM335) ... 32
3.1.2 Pengondisi Sinyal I ... 33
3.1.3 VCO I ... 36
3.2 Pengukuran Tekanan ... 37
3.2.1 Sensor Tekanan Udara ... 37
3.2.2 Pengondisi Sinyal II ... 38
3.2.3 VCO II ... 41
3.3.1 Sensor Kelembaban Udara ... 41
3.3.2 Peak Detector Penyearah Tegangan Puncak Positif ... 43
3.3.3 Pengondisi Sinyal III ... 44
3.3.4 VCO III ... 46
3.4 Penjumlah Membalik N-masukan ... 47
3.5 Buffer (Penyangga) ... 49
BAB IV HASIL DAN PEMBAHASAN ... 50
4.1 Pengukuran Suhu ... 50
4.1.1 Sensor Suhu (LM335) ... 50
4.1.2 Pengondisi Sinyal I ... 53
4.1.3 Voltage Controlled Oscilator (VCO) I ... 56
4.2 Pengukuran Tekanan ... 61
4.2.1 Sensor Tekanan (MPX4100) ... 61
4.2.2 Pengondisi Sinyal II ... 62
4.2.3 Voltage Controlled Oscilator (VCO) II ... 66
4.3 Pengukuran Kelembaban ... 70
4.3.1 Sensor Kelembaban (HS-15) ... 71
a. Kelembaban Suhu 250C ... 71
b. Kelembaban Suhu 350C ... 73
c. Kelembaban Suhu 450C ... 74
d. Pengukuran Kelembaban Pada Suhu 280C ... 75
4.3.2 Peak Detector Penyearah Tegangan ... 76
a. Peak Detector Suhu 250C ... 76
b. Peak Detector Suhu 350C ... 79
c. Peak Detector Suhu 450C ... 82
d. Kinerja Peak Detector ... 84
4.3.2 Pengondisi Sinyal III ... 85
a. Pengondisi Sinyal III Suhu 250C ... 85
b. Pengondisi Sinyal III Suhu 350C ... 87
d. Kinerja Pengondisi Sinyal ... 95
4.3.4 Voltage Controlled Oscilator (VCO) III ... 95
a. Voltage Controlled Oscilator (VCO) III Suhu 250C ... 96
b. Voltage Controlled Oscilator (VCO) III Suhu 350C ... 98
c. Voltage Controlled Oscilator (VCO) III Suhu 450C ... 101
d Kinerja Voltage Controlled Oscilator (VCO) III ... 104
4.4 Bagian Penjumlah ... 104
BAB V KESIMPULAN DAN SARAN ... 107
5.1 Kesimpulan ... 107
5.2 Saran ... 107
DAFTAR GAMBAR
Gambar 2.1 Blok diagram ... 5
Gambar 2.2 Simbol dan bentuk IC LM335 ... 6
Gambar 2.3 Sensor suhu sederhana tanpa kalibrasi ... 6
Gambar 2.4 Sensor tekanan udara dengan unsur piezoelektrik ... 8
Gambar 2.5 Efek piezoelektrik secara umum... 8
Gambar 2.6 Rongga terisolasi dari lingkungan ... 9
Gambar 2.7 Rangkaian sederhana sensor HS-15 ... 11
Gambar 2.8 Penyangga ... 12
Gambar 2.9 Rangkaian penguat Inverting ... 13
Gambar 2.10 Rangkaian penguat Non-Inverting ... 14
Gambar 2.11 Rangkaian penjumlah Inverting ... 15
Gambar 2.12 Rangkaian pengurang ... 16
Gambar 2.13 Konfigurasi pin IC CD4046 ... 17
Gambar 2.14 Bila E1 melebihi VC, C diisi menuju E1 melalui DP ... 18
Gambar 2.15 Bila E1 lebih kecil dari VC, C mempertahankan tegangan pada E1tertinggi sebelumnya ... 18
Gambar 2.16 Multivibrator simetris bebas ... 19
Gambar 2.17 Bentuk-bentuk gelombang untuk multivibrator bebas ... 21
Gambar 2.18 Sine wave oscillator ... 23
Gambar 3.1 Blok diagram perancangan ... 32
Gambar 3.2 Rangkaian dasar sensor suhu terkalibrasi ... 33
Gambar 3.3 Pengondisi sinyal sensor suhu ... 36
Gambar 3.4 VCO I ... 37
Gambar 3.5 Pengondisi sinyal sensor tekanan udara ... 40
Gambar 3.6 VCO II ... 41
Gambar 3.7 Rangkaian Sensor Kelembaban... 42
Gambar 3.8 Penyearah tegangan AC ... 44
Gambar 3.10 VCO III ... 47
Gambar 3.11 Rangkaian penjumlah tiga masukan... 49
Gambar 3.12 Buffer ... 49
Gambar 4.1 Keluaran VCO I ... 105
Gambar 4.2 Keluaran VCO II ... 105
Gambar 4.3 Keluaran VCO III ... 106
DAFTAR TABEL
Tabel 2.1 Karakteristik sensor HS-15P ... 10
Tabel 3.1 Hasil pengujian awal VCO I ... 34
Tabel 3.2 Hasil pengujian awal VCO II ... 39
Tabel 3.3 Hasil pengujian awal VCO III ... 44
Tabel 4.1 Data pengukuran sensor tekanan ... 62
Tabel 4.2 Data pengukuran kelembaban ... 71
Tabel 4.3 Data pengukuran kelembaban suhu 280C ... 75
Tabel 4.4 Error pengukuran kelembaban pada suhu 280C ... 76
Tabel 4.5 Persentase error rata-rata peak detector ... 85
Tabel 4.6 Persentase error rata-rata pengondisi sinyal ... 95
DAFTAR GRAFIK
Grafik 2.1 Grafik perbandingan impedansi terhadap kelembaban ... 11
Grafik 3.1 Perancangan pengondisi sinyal sensor suhu ... 34
Grafik 3.2 Perbandingan Vout dengan tekanan udara ... 38
Grafik 3.3 Perancangan pengondisi sinyal sensor tekanan udara ... 39
Grafik 3.4 Perancangan pengondisi sinyal sensor kelembaban udara ... 44
Grafik 4.1 Grafik Perbandingan Tegangan Keluaran LM335 Terukur dan Teoritis ... 51
Grafik 4.2 Grafik Perbandingan Suhu Udara terhadap Persentase Galat Hasil Pengukuran dari Teoritis ... 53
Grafik 4.3 Grafik Perbandingan Tegangan Masukan Pengondisi Sinyal Terhadap Tegangan Keluaran pengondisi Sinyal Terukur dan Teoritis ... 54
Grafik 4.4 Garfik Perbandingan Tegangan Masukan Pengondisi Sinyal Terhadap Persentase Galat Tegangan Keluaran Pengondisi Sinyal Terukur dari Teoritis ... 56
Grafik 4.5 Grafik Perbandingan Tegangan Input Kendali VCO Terhadap Frekuensi Keluaran VCO Terukur dan Teoritis ... 57
Grafik 4.6 Grafik Perbandingan antara Frekuensi Keluaran VCO Hasil Pengukuran dengan Galat Keluaran VCO Hasil Pengukuran dengan Teoritis ... 59
Grafik 4.7 Grafik Perbandingan Suhu Udara Terhadap Frekuensi Keluaran Sistem Sensor Suhu ... 60
Grafik 4.8 Grafik Perbandingan Suhu Udara Terhadap Persentase Galat Frekuensi Keluaran Sistem Terukur dari Teoritis ... 60
Grafik 4.9 Grafik Perbandingan Tegangan Keluaran MPX4100 Terhadap Tekanan Udara ... 62
Grafik 4.11 Grafik Perbandingan Tegangan Input Pengondisi Sinyal Terhadap Persentase Galat Tegangan Keluaran Terukur dari Teoritis ... 65 Grafik 4.12 Grafik Perbandingan Tegangan Input Kendali VCO Terhadap Frekuensi Keluaran VCO Hasil Terukur dan Toritis ... 66 Grafik 4.13 Grafik Perbandingan Tegangan Input Kendali VCO Terhadap Persentase Galat Frekuensi Keluaran VCO Terukur dari
Teoritis ... 68 Grafik 4.14 Grafik Perbandingan Tekanan Udara Terhadap Frekuensi
Keluaran Sistem Sensor Tekanan ... 69 Grafik 4.15 Grafik Perbandingan Tekanan Udara Terhadap Persentase Galat Frekuensi Keluaran Sistem Terukur dari Teoritis ... 70 Grafik 4.16 Grafik Perbandingan Kelembaban Udara (%RH) terhadap Impedansi (kOhm) yang Dihasilkan. ... 72 Grafik 4.17 Gafik Perbandingan Kelembaban Udara Terhadap Tegangan Keluaran Sensor HS-15 ... 73 Grafik 4.18 Grafik Perbandingan Kelembaban Udara (%RH) terhadap Impedansi (kOhm) yang Dihasilkan ... 73 Grafik 4.19 Gafik Perbandingan Kelembaban Udara Terhadap Tegangan Keluaran Sensor HS-15 ... 74 Grafik 4.20 Grafik Perbandingan Kelembaban Udara (%RH) terhadap Impedansi (kOhm) yang Dihasilkan ... 74 Grafik 4.21 Gafik Perbandingan Kelembaban Udara Terhadap Tegangan Keluaran Sensor HS-15 ... 75 Grafik 4.22 Grafik perbandingan tegangan input terhadap tegangan
Grafik 4.25 Grafik Perbandingan Tegangan InputPeak Detector Terhadap Persentase Galat Tegangan Keluaran Peak Detector Terukur dari Teoritis ... 81 Grafik 4.26 Grafik perbandingan tegangan input terhadap tegangan
outputpeak detector terukur dengan teoritis ... 82 Grafik 4.27 Grafik Perbandingan Tegangan InputPeak Detector Terhadap Persentase Galat Tegangan Keluaran Peak Detector Terukur dari Teoritis ... 84 Grafik 4.28 Grafik Perbandingan Tegangan Input Pengondisi Sinyal
Terhadap Tegangan Keluaran Pengondisi Sinyal Terukur dan Teoritis ... 86 Grafik 4.29 Grafik Perbandingan Tegangan Input pengondisi Sinyal
Terhadap Persentase Galat Tegangan Output Pengondisi Sinyal Terukur dari Teoritis ... 88 Grafik 4.30 Grafik Perbandingan Tegangan Input Pengondisi Sinyal
Terhadap Tegangan Keluaran Pengondisi Sinyal Terukur dan Teoritis ... 89 Grafik 4.31 Grafik Perbandingan Tegangan Input pengondisi Sinyal
Terhadap Persentase Galat Tegangan Output Pengondisi Sinyal Terukur dari Teoritis ... 91 Grafik 4.32 Grafik Perbandingan Tegangan Input Pengondisi Sinyal
Terhadap Tegangan Keluaran Pengondisi Sinyal Terukur dan Teoritis ... 92 Grafik 4.33 Grafik Perbandingan Tegangan Input pengondisi Sinyal
Grafik 4.36 Grafik Perbandingan Input Kendali VCO Terhadap Frekuensi Keluaran VCO Terukur dan Teoritis ... 98 Grafik 4.37 Grafik Tegangan Input Kendali VCO Terhadap Persentase
Galat Keluaran VCO Terukur dari Teoritis ... 101 Grafik 4.38 Grafik Perbandingan Input Kendali VCO Terhadap Frekuensi Keluaran VCO Terukur dan Teoritis ... 101 Grafik 4.39 Grafik Tegangan Input Kendali VCO Terhadap Persentase
DAFTAR LAMPIRAN
Lampiran 1 Gambar Sinyal Keluaran VCO Sensor Suhu dengan Frekuensi 2,02kHz ... L1 Lampiran 2 Gambar Sinyal Keluaran VCO Sensor Tekanan dengan
Frekuensi 7,964kHz ... L1 Lampiran 3 Gambar Sinyal Keluaran VCO Sensor Kelembaban dengan
BAB I
PENDAHULUAN
1.1
Judul
Aplikasi Sensor Pada Sistem Telemetri Multitone
1.2
Latar Belakang Masalah
.
Dalam suatu pengukuran biasanya dibutuhkan suatu instrumen yang
digunakan untuk menentukan suatu besaran (kuantitas) atau variabel. Instrumen
tersebut membantu mempermudah pekerjaan manusia dan juga bisa meningkatkan
ketrampilan manusia serta dalam banyak hal memungkinkan seseorang untuk
menentukan nilai dari suatu besaran yang tidak diketahui manusia atau di luar
jangkauan indra manusia. Dengan demikian, sebuah instrumen dapat didefinisikan
sebagai sebuah alat yang digunakan untuk menentukan nilai atau besaran dari suatu
kuantitas atau variabel.
Sistem Telemetri Multitone merupakan suatu alat ukur yang menggunakan
beberapa sensor untuk mengukur atau mendeteksi keadaan sekitar yang akan
dtransmisikan dalam beberapa frekuensi yang digabungkan atau dijumlahkan. Pada
sistem penerima, frekuensi yang diterima akan dipisahkan menjadi beberapa
frekuensi, yang kemudian diterjemahkan menjadi nilai-nilai hasil pengukuran dari
sensor-sensor tersebut.
Pada sistem transmisi, Sistem Telemetri Multitone ini terdiri dari tiga sensor,
berfungsi untuk mendeteksi keadaan di sekitar sensor, dari suhu lingkungan, tekanan
udara dan kelembaban udara dimana ketiga sensor ini diletakkan.
Hasil pengukuran dari sensor adalah berupa tegangan. Karena tegangan yang
dihasilkan sangat kecil, maka dibutuhkan pengondisi sinyal untuk penyesuaiannya.
Tegangan keluaran dari pengondisi sinyal ini akan diubah menjadi bentuk frekuensi,
dimana perubahan frekuensi ini menujukkan perubahan tegangan hasil pengukuran
sensor yang menyatakan kondisi tempat atau lingkungan dimana sensor ini
diletakkan, yang kemudian frukuensi-frekuensi dari ketiga sensor ini akan
dijumlahkan yang selanjutnya akan ditransmisikan melalui pemancar FM dengan
frekuensi carrier 140MHz.
Dengan adanya sistem telemetri multitone ini, untuk mengukur perubahan
keadaan suatu lingkungan, tidak harus ke tempat tersebut untuk melakukan
pengukuran sewaktu-waktu, hanya dengan mengamati perubahan dari penerima
frekuensi dan penampil hasil pengukuran.
1.3
Tujuan Penelitian
Tujuan dari penelitian ini adalah untuk mengukur suhu, tekanan udara dan
kelembaban udara dan ditransmisikan dengan frekuensi 140 MHz. Selain itu,
penelitian ini bertujuan untuk mendukung sistem telemetri multitone.
1.4
Manfaat Penelitian
Adapun manfaat dari pembuatan alat ini adalah sebagai alat bantu pengukuran
dalam memeroleh data suhu udara, tekanan udara dan kelembaban udara, agar dapat
1.5
Batasan Masalah
Rangkaian aplikasi sensor pada sistem telemetri multitone, dirancang dengan
menggunakan tiga sensor, yaitu sensor suhu menggunakan LM335 dengan rentang
pengukuran dari oC
15 sampai oC
95 dan dengan rentang frekuensi 2kHz sampai
7kHz, sensor tekanan udara menggunakan MPX4100 dengan rentang pengukuran dari
30kPa sampai 90kPa dan dengan rentang frekuensi 8kHz sampai 13kHz dan sensor
kelembaban udara menggunakan HS-15 dengan rentang pengukuran dari 20% sampai
80% dengan batasan frekuensi 14kHz samapai 19kHz. Hasil keluaran dari sensor,
dimasukan ke pengondisi sinyal, kemudian diubah dalam bentuk frekuensi dengan
menggunakan IC CD4046B. Keluaran dari IC CD4046B yang dalam bentuk
frekuensi, kemudian dijumlahkan dan yang terakhir ditransmisikan dengan frekuensi
140MHz.
1.6
Metodologi Penelitian
Langkah langkah yang dipakai dalam penelitian adalah:
1. Menentukan garis besar dari bagian-bagian alat yang akan di buat.
2. Mengumpulkan literatur mengenai teori-teori yang mendasari perangkat
dari aplikasi sensor pada sistem telemetri multitune.
3. Perancangan tiap bagian dari aplikasi sensor pada sistem telemetri
multitune berdasarkan karakteristik tiap komponen.
4. Pengambilan data dilakukan dengan cara mengukur tiap keluaran dari
bagian-bagian sistem telemetri multitune dengan menggunakan alat
multimeter, oscilloscope dan frequency counter.
5. Menganalisa data dengan membandingkan data hasil pengukuran dengan
1.7
Sistematika Penulisan
Sistematika penulisan yang digunakan dalam laporan tugas akhir ini disusun
dalam bentuk sebagai berikut:
Bab I. Pendahuluan yang berisi mengenai latar belakang penulisan, Perumusan
masalah, Pembatasan masalah, Tujuan penelitian, Manfaat penelitian, Metodologi
penelitian dan Sistematika penelitian.
Bab II. Dasar Teori yang berisi mengenai teori-teori yang mendasari perangkat dari
aplikasi sensor pada sistem telemetri multitune.
Bab III. Perancangan aplikasi sensor pada sistem telemetri multitune yang berisi
perancangan tiap bagian dari aplikasi sensor pada sistem telemetri multitune
berdasarkan karakteristik tiap komponen.
Bab IV. Pembahasan yang berisi data-data hasil pengujian aplikasi sensor pada sistem
telemetri multitune.
Bab V. kesimpulan dan Saran yang berisi mengenai spesifikasi alat dan saran-saran
BAB II
DASAR TEORI
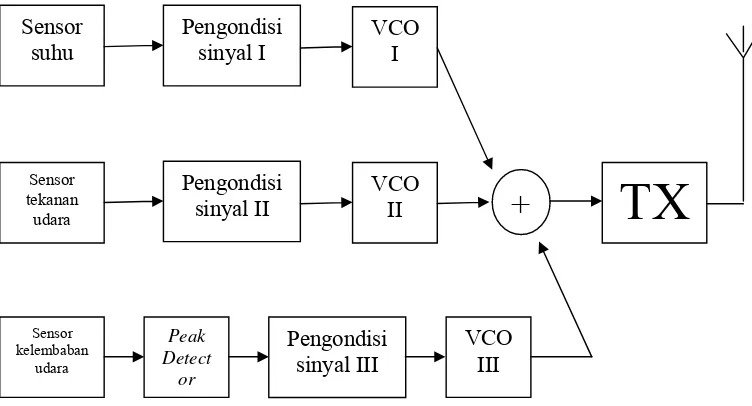
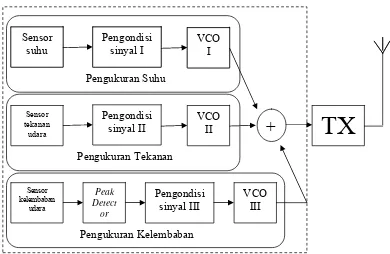
Aplikasi sensor pada sistem telemetri multitone adalah penggunaan sensor
untuk melakukan pengukuran jarak jauh, yang terdiri dari tiga sensor, yaitu sensor
suhu, tekanan udara dan kelembaban udara. Ketiga sensor ini akan mengubah besaran
fisik menjadi besaran listrik, yang berupa sinyal DC. Sinyal ini kemudian dirubah
menjadi frekuensi, dimana setiap terjadi perubahan sinyal tegangan, maka akan terjadi
perubahan frekuensi. Sensor suhu akan memakai rentang perubahan frekuensi dari
2kHz sampai 7kHz, sensor tekanan akan memakai rentang frekuensi dari 8kHz
sampai 13kHz dan sensor kelembaban udara akan memakai rentang frekuensi 14kHz
sampai 19Khz. Agar hasil penjumlahan bisa dipisahkan lagi, sebelum dijumlahkan,
amplitudo dari masing-masing sinyal frekuensi di bedakan. Blok diagram alir dari
aplikasi sensor pada sistem multitone ditunjukan pada gambar 2.1.
Gambar 2.1. Blok Diagram
Sensor kelembaban
udara
Pengondisi sinyal III
VCO III
+
TX
Sensor tekanan
udara
Pengondisi sinyal II
VCO II Sensor
suhu
Pengondisi sinyal I
VCO I
2.1 S
semik bahan memp tegan berup LM3 tiga k ditent anoda yang secarSensor Suh
Untuk trakonduktor d
n semikond
punyai sifat
ngan keluara
pa IC LM35
35 berupa s
kaki. Dilihat
tukan kaki-k
a dan kaki k
stabil. Kar ra sederhana G
hu Elektro
ansduser su dengan bent duktor init yang benar
an yang dih
dan LM335 Gambar semikondukt dari bawah kakinya. Ka ketiga adalah
rena itu pen
untainya da
Gambar 2.3.
onis
uhu secara k
tuk fisik sep
mempunyai
r-benar linie
hasilkan. Co
5.
r 2.2. Simbol
tor yang sec
dengan bida
aki pertama
h kaki katod
nerapannya apat digamba Sensor Suh khusus suda perti transist i jangkauan
er antara pe
ontohnya ada
l dan Bentuk
cara fisik be
ang yang me
merupakan
da. IC LM33
dalam untai
arkan seperti
hu Sederhana
ah tersedia
tor tiga bua
n pengukura
erubahan suh
alah semi k
k IC LM335
entuknya sa
endatar berad
kaki adj, ka
35 sebenarny
i elektronis
i gambar 2.3
a Tanpa Kali
dalam bent
ah kaki. Ke
an yang le
hu yang dite
konduktor te
.
ama dengan
da di atas ma
aki kedua ad
ya adalah di
Berikut ini adalah beberapa karakteristik dari LM335 yang mendukung
pembuatan perangkat telemetri ini.
1. LM335 mempunyai perubahan pada keluaran sebesar 10mV setiap 10K bila
pada komponen ini diberi catu daya maka IC ini akan bekerja sebagai sensor
suhu yang brsifat linier.
2. Mempunyai rentang pengukuran suhu yang besar, dari -400C sampai dengan
100 0C.
Bila setiap 10K menyebabkan perubahan sebesar 10mV maka jangkauan dari 16 0C =
289,15 K sampai dengan 950C = 368,15 mempunyai 80 perubahan sehingga
menyebabkan perubahan pada tegangan keluaran sebesar 80 × 10mV = 800mV = 0,8
volt.
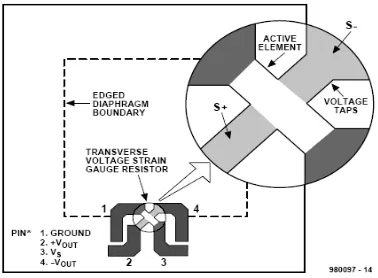
2.2 Sensor Tekanan Udara
Sensor berisi sebuah rongga tipis yang nantinya akan bergeser ke derajat yang
lebih tingi bila terkena tekanan udara seperti terlihat pada gambar 2.4. Suatu unsur
piezoelektrik yang ditunjukan pada gambar 2.5 yang dipadukan sepanjang tepi sekat
rongga yang ada yang nantinya akan mengikuti pergerakan sekat rongga tersebut.
Setiap sensor tekanan udara memiliki persamaan fungsi alih tertentu. Fungsi
persamaan ini adalah mengubah level tekanan udara menjadi besaran tegangan
tertentu yang dapat diterima oleh komponen elektronika. Untuk sensor yang
digunakan menggunakan persamaan 2.1 di bawah ini.
E p
Vs
Vout = (0,01059 −0,1518)± ...(2.1)
Dengan Vs = Tegangan sumber (Volt)
E = ± error
Unsur piezoelektrik adalah suatu bahan-bahan kristal yang tidak simetri
(seperti kuartz, garam Rochelle, dan barium titanit) yang akan menghasilkan suatu
gaya gerak listrik (ggl) bila diregangkan dan sebaliknya dapat berubah dimensinya
bila dikenai tegangan listrik.
Gambar 2.4. Sensor tekanan udara dengan unsur piezoelektrik
Gambar 2.5. Efek piezoelektrik secara umum.
Sifat piezoelektrik adalah sebagai berikut:
Sifat piezoelektrik langsung:
1. Bila pelat piezoelektrik diberi tekanan, maka akan timbul muatan
listrik pada kedua permukaannya.
2. Pelat juga merupakan kapasitor dengan konstanta dielektrik tertentu,
Sifat piezoelektrik balik:
1. Bila pelat piezoelektrik diberi tegangan listrik, maka kedua
permukaannya mendapat tekanan.
2. Pelat juga merupakan bahan elastik dengan konstanta elastik tertentu,
tebalnya akan berubah.
3. Jika diberi tegangan bolak-balik maka pelat bergetar.
Ketika suatu catu daya diberikan pada sensor, maka akan menghasilkan
keluaran tegangan yang bervariasi yang akan menyesuaikan variasi perubahan karena
tekanan.
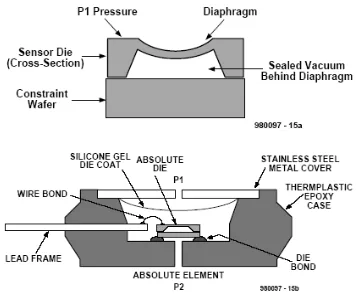
Di dalam diferensial tekanan, sensor diaplikasikan pada kedua sisi sekat
rongga, lalu sesudah itu alat menyediakan suatu level tegangan yang berbanding lurus
dengan perbedaan tekanan di kedua sisinya.
Standar tekanan sensor yang dibangun sepanjang bentuk serupa dengan mode
diferensial. Jenis ini menggunakan tekanan yang berkenaan dengan lingkungan
sebagai acuannya, sehingga level tegangan keluaran sebanding dengan perubahan
tekanan relatif di lingkungan.
Gambar 2.6. Rongga terisolasikan dari lingkungan
Di dalam nilai absolut sensor, digunakan dalam desain saat ini, ruang
referensi tekanan seperti ditunjukan pada gambar 2.6. Tegangan keluaran sebanding
dengan nilai absolut tekanan udara, yang membuat sensor ini pantas digunakan dalam
altimeter dan barometer.
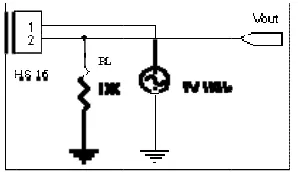
2.3 Sensor Kelembaban (Relative Humidity HS-15P)
Sensor Relative Humidity HS-15P adalah sensor kelembaban relatif.
Karakteristik dari sensor HS-15P adalah seperti pada Tabel 2.1. Pada dasarnya cara
kerja dari sensor ini adalah mendeteksi besarnya kelembaban relatif udara disekitar
sensor tersebut, yang menghasilkan perubahan nilai impedansi sensor. Semakin besar
tingkat kelembaban relatif maka semakin kecil pula nilai impedansi sensor. Kurva
perbandingan antara besarnya perubahan resitansi dan besarnya perubahan
kelembaban relatif untuk sensor HS-15P adalah seperti pada gambar 2.7.
Tabel 2.1. Karakteristik sensor HS-15P
Sesuai dengan tabel karakteristik, tegangan kerja sensor HS-15P adalah 1VAC
dengan frekuensi antara 50Hz sampai 1KHz, dengan jangkauan kepekaan antara 20%
sampai 100% RH (Relative Humidity).
Untuk mengetahui besarnya impedansi sensor sesuai dengan tingkat
tingk
gamb
pengu
kat kelembab
bar 2.7, impe
Karena k
ubahan menj
Grafik
ban 50%RH
edansi senso
keluaran se
jadi teganga
2.1. Grafik P
Gambar 2
dan suhu ru
r adalah sek
ensor berup
an DC.
Perbandinga
.7. Rangkaia
uangan adala
kitar 60KΩ.
pa tegangan
an Impedans
an Sederhana
ah 25°C, ma
n AC, ma
i Terhadap K
a sensor
HS-aka sesuai gr
aka perlu
Kelembaban
-15
rafik pada
dilakukan
2.4
Penguat Operasional
2.4.1
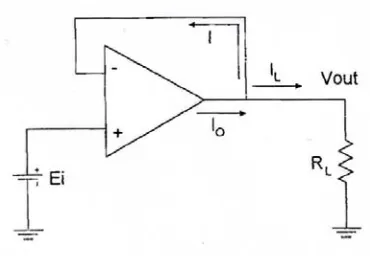
Penyangga
(Buffer)
Rangkaian pada gambar 2.8 adalah rangkaian penyangga yang berfungsi untuk
menghindari terjadinya penurunan tegangan karena penggunaan kabel yang
panjang dan untuk menghindari tejadinya pembebanan yang berlebihan pada saat
keluaran dari sensor menuju pengubah tegangan menjadi frekuensi.
Gambar 2.8. Penyangga
Beda potensial antara masukan membalik dan masukan tak membalik adalah 0
volt maka Vo = Ei.
Penguatan tegangan : = =1
i out v
E V A
...(2.2)
L o I I
I = + karena ≈ 0
L o I
I =
L i L out L
R E
R V
I = =
...(2.3)
Penyangga ini digunakan karena mempunyai impedansi masukan yang sangat
2.4.2
Penguat
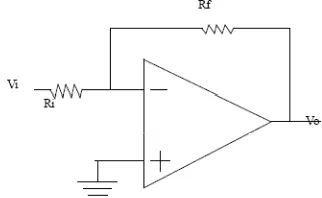
Inverting
Inverting amplifier ini, input dengan outputnya berlawanan polaritas. Jadi
ada tanda minus pada rumus penguatannya. Penguatan inverting amplifier adalah
bisa lebih kecil nilai besaran dari satu dan selalu negatif rumusnya :
...(2.4)
Gambar 2.9. Rangkaian Panguat Inverting
2.4.3
Penguat
Non-Inverting
Rangkaian non inverting ini hampir sama dengan rangkaian inverting
hanya perbedaannya adalah terletak pada tegangan inputnya dari masukan
noninverting.
Rumusnya seperti berikut :
...(2.5)
Sehingga persamaan menjadi:
Hasil tegangan output noninverting ini akan lebih dari satu dan selalu positif.
Rangkaiannya adalah seperti pada gambar berikut ini :
Gambar 2.10. Rangkaian Penguat Non-Inverting
2.4.4
Penjumlah membalik N-masukan
Rangkaian penjumlah atau rangkaian adder adalah rangkaian penjumlah
yang dasar rangkaiannya adalah rangkaian inverting amplifier dan hasil outputnya
adalah dikalikan dengan penguatan seperti pada rangkaian inverting. Pada
dasarnya nilai outputnya adalah jumlah dari penguatan masing masing dari
inverting, seperti :
Va Ra Rf
Voa =− Vb
Rb Rf
Vob =− Vc
Rc Rf
Voc =−
⎟ ⎠ ⎞ ⎜
⎝
⎛ + +
−
= Vc
Rc Vb Rb Va Ra Rf
Vot 1 1 1 ...(2.7)
Untuk penguatan sama dengan satu, maka Rf =Ra =Rb =Rc, maka persamaan
menjadi:
) (Va Vb Vc
Vot =− + +
...(2.8)
Tahanan
Rom
gunanya adalah untuk meletak titik nol supaya tepat, terkadangtanpa
Rom
sudah cukup stabil. Maka rangkaian ada yang tanpaRom
juga baikdilakukan karena tegangan yang diparalel akan menjadi tegangan terkecil yang
ada., sehingga susah terjadi proses penjumlahan.
Gambar 2.11. Rangkaian Penjumlah Inverting
2.4.5
Subtractor/pengurang.
Rangkaian pengurang ini berasal dari rangkaian inverting dengan
memanfaatkan masukan non-inverting, sehingga persamaan menjadi sedikit ada
perubahan. Rangkaian pengurang dengan satu op-amp, memanfaatkan kaki
inverting dan kaki non-inverting. Supaya benar-benar terjadi pengurangan, maka
nilai dibuat seragam seperti gambar 2.12. dengan rumus:
Va R R Vb R R
R R
R
Vo ⎟ −
⎠ ⎞ ⎜ ⎝ ⎛
+ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ +
= 1
Sehingga:
)
(
Vb
Va
Gambar 2.12. Rangkaian Pengurang
2.5
Pengondisi Sinyal
Pengondisi sinyal ini berfungsi untuk menyesuaikan keluaran dari sensor
supaya dapat diterima dengan benar oleh pengubah tegangan ke frekuensi atau
VCO (Voltage Control Oscilator). Pengolah sinyal ini menggunakan penguat
operasional (op-amp). Penerapan op-amp ini mudah untuk digunakan pada
beberapa rangkaian pengolah sinyal, seperti penguat tegangan, penguat arus,
penjumlah dan pengurang sinyal, baik itu berupa sinyal DC atau sinyal AC.
Penggunaan op-amp diperlukan karena op-amp mempunyai sifat penting salah
satunya yaitu mempunyai impedansi masukan tinggi dan impedansi keluaran
rendah, sehingga tidak perlu arus yang besar untuk mengaktifkan op-amp dan
mempunyai nilai penguatan yang tinggi. Pengondisi sinyal ini terdiri dari dua
bagian, yaitu:
- Bagian penguat tegangan (pengali tegangan)
2.6
VCO (
Voltage Control Oscilator
)
Voltage Control Oscilator adalah sebuah rangkaian yang dapat menghasilkan
sinyal keluaran yang bervariasi (tipe gelombang kotak dan tipe gelombang gigi
gergaji) dengan daerah frekuensinya dikendalikan oleh tegangan DC.
VCO dalam sistem ini dirancang dengan menggunakan IC CD4046B, dimana
sinyal keluaran dari VCO dengan daerah frekuensinya ditentukan oleh tegangan input
VCOin, kapasitor yang terhubung dengan
Cin
1
keCin
2
, serta resistor R1 keVss
dan2
R ke
Vss
.Konfigurasi pin untuk VCO dalam IC CD4046 dapat dilihat dalam gambar
2.13.
2.7
Pengikut dan Penyimpan Puncak Positif
Rangkaian pengikut dan penyimpan puncak terlihat dalam gambar 2.114 dan
gambar 2.15. Rangkaian ini terdiri dari dua op-amp, dua diode, sebuah tahanan,
sebuah kapasitor penyimpan dan sebuah saklar reset. Op-amp A adalah penyearah
gelombang penuh presisi yang hanya akan mengisi C bila tegangan masukan E1
melebihi tegangan kapasitor VC. Op-amp B adalah pengikut tegangan pengikut
tegangan yang keluarannya sama dengan VC. Impedansi masukan yang tinggi dari
pengikut ini tidak hanya memberi kemungkinan untuk mengosongkan kapasitornya.
Gambar 2.14. Bila E1 melebihi VC, C diisi menuju E1 melalui DP
Gambar 2.15. Bila E1 lebih kecil dari VC, C mempertahankan
Pada gambar 2.14, bila E1 melebihi VC, diode DP terbias maju mengisi
kapasitor penahan C. Bila E1 turun dibawah VC, diode DM hidup seperti terlihat
dalam gambar 2.15. diode DP mati dan melepaskan C dari keluaran op-amp A. diode
P
D harus merupakan jenis bocoran rendah, karena kalau tidak, tegangan kapsitornya
akan terkosongkan (layu). Untuk memperkecil kelayuan ini, op-amp B memerlukan
arus bias masukan yang kecil dank arena alasan ini harus merupakan op-amp
efek-medan-bipolar (BIFET), atau semi-konduktor-oksida-logam (MOS).
2.8
Multivibrator Astabil
Pada sebuah multivibrator astabil, dua keadaan rangkaian yang dapat dicapai
adalah bersifat stabil sementara. Rangkaian akan bekerja untuk secara bergantian
mencapai kedua keadaan ini (beralih dari keadaan satu ke keadaan lainnya) secara
berulang-ulang, yaitu pada kondisis saturasi positif dan saturasi negative keluaran
penguat. Jadi keluaran penguat akan berupa gelombnag persegi.
Rangkaian pada gambar 2.16 berikut ini memperlihatkan sebuah op-amp
dengan masukan diferensial yang bekerja sebagai sebuah multivibrator simetris bebas
(free running symmetrical multivibrator).
Periode dari gelombang persegi ini ditentukan oleh konstanta waktu CR dan
rasio umpan balik yang dibangun oleh pembagi tegangan resistif R1,R2.
Kerja rangkaian ini dapat dijelaskan dengan mengacu pada bentuk-bentuk
gelombang yang ditampilka pada gambar 2.17. dengan mulai dari titik
t
'
yaitu saatpenguat berada dalam kondisi saturasi negative, tegangan pada terminal A dapat
dirumuskan sebagai:
sat o
A
V
V
=
β
− ... ...(2.9) Dimana:2 1
1 R R
R
+ =
β
Terminal B berada dalam potensial yang lebih positif relative terhadap
terminal A. Potensial terminal B ini akan berkurang seiring dengan terjadinya
pelepasan muatan kapasitor C yang terjadi melalui resistor R. pada saat perbedaan
potensial diantara kedua terminal ini (terminal B dan A) mendekati nol, penguat akan
keluar dari kondisi saturasinya. Umpan balik positif dari terminal keluaran op-amp ke
terminl A akan mengakibatkan kondisi peralihan regenerative yang menggerakkan
penguat menuju kondisi saturasi positif. Tegangan pada kapsitor yang terhubung seri
dengan resistor tidak dapat berubah seketika, dan oleh karenanya potensial pada
terminal B akan tetap konstan selama proses transisi yang terjadi secara cepat ini.
Pada kondisi ini kapasitor C akan mengalami proses pengisian muatan melalui
resistor R, sehingga potensial terminal B akan naik atau bertambah secara
eksponensial. Ketika potensial terminal B ini mencapai kondisi
V
BV
o sat+
=
β
,rangkaian akan beralih kembali ke keadaan dimana penguat berada dalam kondisi
Gambar 2.17. Bentuk-bentuk gelombang untuk multivibrator bebas
Periode osilasi dapat diperoleh berdasarkan persamaan umum untuk proses
pengisian muatan kapasitor. Kapasitor C dengan tegangan mula-mula sebesar Vi,
yang dimuati melalui resistor R oleh tegangan Vt akan mencapai tegangan Vb dalam
selang waktu yang dirumuskan oleh persamaan:
⎟ ⎟ ⎠ ⎞ ⎜
⎜ ⎝ ⎛
− − =
b f
i f
V V
V V CR
t ln ...(2.10)
Dengan mensubstitusikan nilai-nilai tegangan yang bersesuaian dari gambar
2.15 diatas maka persamaan periode waktu di atas dapat dinyatakan sebagai :
⎟⎟ ⎠ ⎞ ⎜⎜
⎝ ⎛
− −
= − +
− +
sat o sat o
sat o sat o
V V
V V
CR t
β β
Atau ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − − = + − + ) 1 ( ln 1 β β sat o sat o sat o V V V CR t ...(2.11)
Dan ⎟⎟
⎠ ⎞ ⎜⎜ ⎝ ⎛ − − = − − + − sat o sat o sat o sat o V V V V CR t β β ln 1
Atau ⎟⎟
⎠ ⎞ ⎜⎜ ⎝ ⎛ − − = − + ) 1 ( ln _ 1 β β sat o sat o sat o V V V CR t ...(2.12)
Jika nilai positif dan negative dari tegangan saturasi penguat memiliki
magnitude yang sama maka t1 =t2dan persamaan untuk periode osilasi rangkaian
akan menjadi: ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ − + = + =
β
β
1 1 ln 2 21 t CR
t
t ...(2.13)
Yang dapat disederhanakan lebih lanjut menjadi :
⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ + = 2 1 2 1 ln 2 R R CR T ...(2.14)
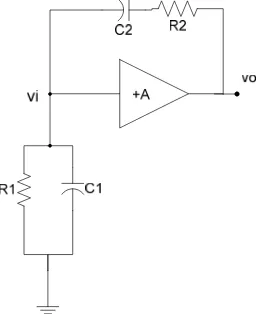
2.9
Osilator Gelombang Sinus
Osilator gelombang sinus Wien Bridge merupakan osilator dengan kerja
osilasi yang disebabkan pengulangan osilasi dari output ke input. Kerena
menggunakan sedikit komponen, Wien Bridge Oscillator sering digunakan dalam
rangkaian. Inti dari rangkaian ini adalah rangkaian feedback negatif yang membuat
operasi osilasi menjadi lebih stabil.
Osilator gelombang sinus adalah sebuah osilator, dimana pembuatannya sulit,
karena distorsi dari sinyal osilasi, dibandingkan dengan osilator gelombang kotak dan
Dengan menggunakan C=C1 =C2, R=R1 =R2, frekuensi osilasi dapat
dihitung dengan menggunakan persamaan 2.18.
CR f
π
2 1
= ...(2.15)
Gambar 2.18. Sine Wave Oscillator
2.10
Karakteristik Alat Ukur
Dalam pengukuran’ digunakan istilah-istilah yang menentukan karakteristik
suatu alat ukur sebagai berikut:
1. Presisi (ketelitian)
Presisi merupakan suatu ukuran kemampuan untuk mendapatkan hasil
pengukuran yang serupa. Dengan memberikan suatu harga tertentu bagi
suatu variable, ketelitian (presisi) merupakan suatu ukuran tingkatan yang
menunjukan perbedaan hsil pengukuran pada pengukuran-pengukuran
2. Akurasi (ketepatan)
Akurasi merupakan sifat kedekatan pembacaan alat ukur dengan nilai
sebenarnya dari variable yang diukur. Akurasi ditentukan dengan cara
mengkalibrasi dengan kondisi operasi tertentu.
3. Sensitivitas (kepekaan)
Sensitivitas merupakan perubahan terkecil dari masukan yang
mempengaruhi keluaran.
4. Resolusi (kemampuan pembacaan skala)
Resolusi diartikan sebagai satuan terkecil dari keluaran.
5. Repeatability (kemampuan mengulangi)
Repeatability adalah sebagai ukuran devisiasi dari hasil uji nilai rata-rata.
Hal ini mengindikasikan kedekatan diantara sejumlah pengukuran yang
dilakukan secara berulang dengan kondisi yang sama.
6. Threshold
Threshold merupakan nilia minimum perubahan masukan yang tidak dapat
diamati atau dideteksi, bila masukannya berangsur-angsur bertambah dari
nol.
7. linearitas
Linearitas merupakan kemampuan untuk menghasilkan ukuran alat ukur
yang menghasilkan keluaran yang secara linier. Dalam hal ini, dapat
didefinisikan dengan persamaan sebagai berikut:
c
mx
y
=
+
... (2.16)Keterangan:
y = keluaran
x = masukan
m = kemiringan (slope)
2.11
Jenis-jenis Kesalahan
Kesalahan-kesalahan dapat terjadi karena berbagai sebab dan umumnya dibagi
dalam tiga jenis utama, yaitu:
1. Kesalahan-kesalahan umum (gross-errors)
Gross-errors ini kebanyakan disebabkan oleh kesalahan manusia,
diantaranya adalah kesalahan pembacaan alat ukur, penyetelan dan
pemakaian instrument yang tidak sesuai, dan kesalahan penaksiran.
2. Kesalahan-kesalahan sistematik (systematic errors)
Systematic errors ini disebabkan oleh kekurangan-kekurangan pada
instrument sendiri seperti kerusakan atau adanya bagian-bagian yang aus
dan pengaruh lingkungan terhadap peralatan atau pemakai.
3. Kesalahan-kesalahan yang tidak disengaja (random error)
Random error diakibatkan oleh penyebab-penyebab yang tidak dapat
langsung diketahui sebab perubahan-perubahan parameter atau sistem
pengukuran terjadi secara acak.
2.12
Analisis Statistik
Analisa statistic terhadap data pengukuran adalah pekerjaan yang
biasa, sebab menentukan penentuan ketidakpastian hasil pengujian akhir
secara analisis. Hasil dari pengukuran dengan metode tertentu dapat
diramalkan berdasarkan contoh (data sampel) tanpa memiliki informasi atau
keterangan yang lengkap mengenai semua faktor-faktor gangguan.
Agar cara-cara statistic dan keterangan yang diberikan bermanfaat,
2.12.1
Nilai Rata-rata
(Arithmetic Mean)
Nilai yang paling mungkin dari suatu variable yang diukur adalh nilai
rata-rata dari semua pembacaan yang dilakukan. Pendekatan yang paling baik
akan diperoleh bila semua pembacaan untuk suatu besaran sangat banyak.
Secara teoritis, pembacaan yang tak berhingga akan memberikan hasil paling
baik, walaupun dalam prakteknya hanya dapat dilakukan pengukuran yang
terbatas.
Nilai rata-rata akan diberikan oleh persamaan:
n x n
x x
x x
x= 1+ 2 + 3+...+ n = Σ ... (2.17) Dimana:
x= nilai rata-rata
=
n
x x x
x1, 2, 3, data pembacaan yang dilakukan
n = jumlah data pembacaan
2.12.2
Penyimpangan Terhadap Nilai Rata-rata
Penyimpangan (deviasi) adalah selisih antara suatu pembacaan
terhadap nilai rata-rata dalam sekelompok pembacaan. Jika penyimpangan
pembacaan pertama x1 adalah d1, penyimpangan pembacaan kedua x2
adalah d2 dan seterusnya, maka penyimpangan-penyimpangan terhadap nilai
rata-rata adalah:
x x
d1 = 1− d2 =x2 −x dn = xn −x...(2.18)
Perlu dicatat bahwa penyimpangan terhadap nilai rata-rata boleh positif atau
2.12.3
Penyimpangan Rata-rata
(Average Deviation)
Devisiasi rata-rata adalah suatu indikasi ketepatan
instrument-instrumen yang digunakan untuk pengukuran. Menurut definisi, deviasi
rata-rata adalah penjumlahan nilai-nilai mutlak dari penyimpangan-penyimpangan
dibagi dengan jumlah pembacaan. Diviasi rata-rata dapat dinyatakan dengan:
n d
n
d d
d d
D= 1 + 2 + 3 +...+ n =
∑
...(2.19)2.12.4
Deviasi Standar
Deviasi standar (root mean square) merupakan cara yang sangat
ampuh untuk menganalisis kesalahan-kesalahan acak secara stastitik. Deviasi
standar dari jumlah data terbatas didefinisikan sebagai akar dari penjumlahan
semua penyimpangan (deviasi) setelah kuadratkan dibagi dengan banyak
pembacaan. Tetapi dalam praktek, jumlah pengamatan yang mungkin adalah
terbatas. Deviasi standar untuk sejumlah data terbatas adalah:
1 1
... 2 2
2 3 2 2 2 1
− = −
+ + + + =
n d n
d d
d
d n t
σ ...(2.20)
2.13
Regresi Linier
Regrasi linier mempunyai tujuan untuk melinierkan hasil pengukuran
yang tertampil dipenampil. Jadi diusahakan membuat garis lurus dari grafik
pengukuran dan tampilan seperti pada persamaan dibawah ini:
e x a a
y= 0+ 1 + ...(2.21)
Dengan a0 dan a1 adalah koefisien-koefisien yang masing-masing
model standard an pengamatan, maka galat dapat dinyatakan dengan
persamaan:
x a a y
e= − 0− 1 ...(2.22)
2.13.1
Kriteria Untuk Kecocokan Terbaik
Ada beberapa criteria untuk mencocokkan garis terbaik melalui data
yaitu:
b. Meminimumkan jumlah galat-galat sisa
c. Meminimumkan jumlah nilai-nilai mutlak ketidaksesuaian
d. Kriteria minimum maksimum (minmaks)
Dari ketiga criteria diatas, strategi kriteria minmaks yang paling baik untuk
mencocokkan garis. Dalam teknik ini, garis yang dipilih meminimumkan jarak
maksimum suatu titik dari garis tersebut. Untuk sebuah titik tunggal dengan
kesalahan yang besar, strategi ini kurang baik.
Untuk mengatasi kelemahan pendekatan tersebut dilakukan dengan
cara meminimumkan jumlah kuadrat sisa (kuadrat residu) Sr, sebagai
berikut:
(
)
21
1 0 1
2
∑
∑
= =
− − =
= n
i
i i
n
i i
r e y a ax
S ...(2.23)
Kriteria ini mempunyai sejumlah keuntungan, termasuk kenyataan bahwa
dapat menghasilkan garis yang unik untuk himpunan data yang diberikan.
2.13.2
Kecocokan Kuadrat Terkecil dar Garis Lurus
Untuk menentukan nilai-nilai a0 dan a1, persamaan 2.23
∑
− − = ∂ ∂ ) (2 0 1
0
i i
r y a ax
a S ...(2.24)
[
]
∑
− − − = ∂ ∂ i i ir y a ax x
a S
) (
2 0 1
1
...(2.25)
Dengan membuat turunan-turunan ini sama dengan nol, akan menghasilkan
sebuah Sr yang minimum. Jika dilakukan, maka persamaan menjadi:
∑
−∑
−∑
= yi a0 a1xi
0 ...(2.26)
∑
−∑
−∑
= 2
1 0
0 yixi a xi axi ...(2.27)
Setelah melihat bahwa
∑
a0 =na0, persamaan-persamaannya dapatdiungkapkan sebagai himpunan dua persamaan linier dengan dua bilangan (a0
dan a0).
∑
=∑
+a xi yi
na0 1 ...(2.28)
∑
xia +∑
xia1 =∑
xiyi2
0 ...(2.29)
Dengan menyelesaikan persamaan tersebut diperoleh:
(
)
∑
∑
∑
∑ ∑
− − = 2 2 1 i i i i i i x x n y x y x n a ...(2.30)Dengan persamaan (2.29) yang disubstitusikan ke persamaan (2.30)
dihasilkan:
x a y
a0 = − 1 ...(2.31)
Dimana y dan x masing-masing adalah rata-rata (mean) dari x dan y.
2.13.3
Pengukuran Galat Regresi Linier
Untuk kasus-kasus dimana sebaran titik di sekeliling garis mempunyai
di sekitar garis adalah normal, maka regresi kuadrat terkecil akan
menyediakan taksiran-taksiran a0 dan a1 yang terbaik (yang paling mungkin).
Jika criteria ini terpenuhi, maka simpangan baku untuk garis regresi
adalah:
2 − =
n S
S r
x
y ...(2.32)
Dimana
x y
S dinamakan galat taksiran baku (standard error of the estimate).
Pembagi adalah n-2 karena dua taksiran yang diturunkan dari data a0dan a1
dipakai untuk menghitung Sr.
Sama halny dengan simpangan baku, galat taksiran baku mengukur
sebaran data. Namun
x y
S mengukur sebaran di sekeliling garis regresi.
Besarnya seberan dalam peubah tidak bebas yang ada sebelum regresi
dinamakan jumlah total kuadrat St.
(
)
∑
−= 2
Y Y
St i ...(2.33)
Setelah melaksanakan regresi linier, dapat dihitung Sr (jumlah kuadrat
sisa-sisa di sekeliling garis regresi).
Selisih antara St dan Sr mengukur perbaikan atau pengurangan galat
sehubungan dengan model garis lurus.
Selisih ini dapat dinormalkan terhadap galat total untuk memberikan:
t r t
S S S
r2 = − ...(2.34) Dimana
2
r = koefisien determinan (
( )
r2Untuk kecocokan yang sempurna, Sr =0 dan 1
2 =
r , yang
menandakan bahwa garis tersebut menerangkan 100% dari ketidaktepatan
(kevariabilitasan). Untuk r =r2 =0, Sr =St kecocokan ini menyatakan tidak
ada perbaikan.
Kolerasi ( r ) dapat dihitung dengan persamaan sebagai berikut:
(
)(
)
(
)
∑
(
∑
)
∑
∑
∑
∑
∑
− −
− =
2 2
2 2
i i
i i
i i i
i
y y
n y y
n
x x y
x n
r ...(2.35)
Dimana
r = korelasi
n = frekuensi pengukuran
i
x = data masukan
i
BAB III
PERANCANGAN
Mengacu pada gambar 2.1, bagian yang akan dibuat ditunjukkan pada gambar
3.1 yang berada dalam kotak garis putus-putus.
Pengukuran Suhu
Pengukuran Tekanan
Pengukuran Kelembaban
Gambar 3.1 Blok diagram perancangan
3.1.
Pengukuran Suhu
Pada bagian pengukuran suhu, terdiri dari sensor suhu LM335, pengondisi
sinyal I dan VCO I seperti pad gambar 3.1.
3.1.1.
Sensor Suhu (LM335)
Sensor suhu
Pengondisi sinyal
VCO
Sensor kelembaban
udara
Pengondisi sinyal III
VCO III
+
TX
Sensor tekanan
udara
Pengondisi sinyal II
VCO II Sensor
suhu
Pengondisi sinyal I
VCO I
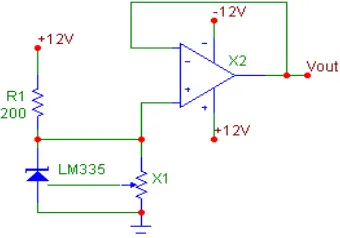
Sesuai dengan dasar teori, penerapannya dalam untai elektronis sama
dengan dioda, secara sederhana untainya dapat digambarkan seperti gambar 3.2.
Gambar 3.2. Rangkaian Dasar Sensor Suhu Terkalibrasi
Rs pada rangkaian dasar dipakai untuk membatasi arus pada sensor.
Sesuai dengan data sheet, arus maju adalah 15mA, pada perancangan tegangan
umpan yang dipakai adalah 12 Volt DC, jadi :
Ω = × =
= − 200
10 15
12
3
Is V
Rs CC
3.1.2.
Pengondisi Sinyal I
Dalam data sheet IC LM335, keluaran sensor suhu LM335 adalah sebesar
10mVolt/0K. Jika diketahui suhu terukur adalah 160C, maka dikonversi dalam
sekala Kelvin berarti 289,150K, sehingga keluaran sensor adalah:
Volt V
K mVolt K
V
LM LM
8915 , 2
/ 10 15
, 289
335
0 0
335
=
× =
Pengondisi sinyal pada sensor suhu dirancang dengan menggunakan data
Vin pada VCO, agar menghasilkan frekuensi keluaran sesuai dengan
perancangan, yaitu frekuensi minimum adalah 2kHz pada pengukuran 0C
16
yaitu tegangan masukannya adalah 1,06Volt dan frekuensi maksimum adalah
dari hasil pengukuran awal perancangan VCO dengan nilai
C
=
10
nF
,Ω = k
R1 15 dan R2 =56kΩ seperti pada tabel 3.1 dengan menggunakan VDD= 5
Volt.
Tabel 3.1. Hasil Pengujian awal VCO I
IN
V
(Volt)
out
f
(kHz)
0 1,930
1,06 2,014
1,696 3,000 2,260 4,047 2,508 4,505 2,777 5,001 3,332 5,996
3,963 7,013
5,51 7,1
Dibawah ini adalah grafik perancangannya. Untuk tegangan input pada
pengondisi sinyal adalah tegangan keluaran sensor sebagai x, dan tegangan
keluaran pengondisi sinyal adalah tegangan kendali VCO sebagai y.
Grafik 3.1. Perancangan Pengondisi Sinyal Sensor Suhu
Persamaan y = 3,674x - 9,559 pada grafik 3.1 diperoleh dengan menggunakan
prinsip persamaan 2.16 dengan perhitungan sebagai berikut:
Untuk nilai kemiringan (m)dihitung sebagai berikut:
y = 3.674x ‐9.559
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
2.5 3 3.5 4
Tegangan
Kelu
aran
Peng
on
disi
Siny
al
(Volt
DC
)
Tegangan Keluaran Sensor Suhu (Volt DC)
SUHU
674 , 3 79 , 0 903 , 2 89 , 2 68 , 3 06 , 1 963 , 3 1 2 1
2 = =
− − = − − = x x y y m
Untuk nilai offset (c) dihitung sebagai berikut:
559 , 9 619 , 10 06 , 1 89 , 2 674 , 3 06 , 1 674 , 3 − = − = + × = + = c c c x y
Dari hasil di atas, dapat dirancang pengondisi sinyal sebagai berikut:
- Untuk penguatannya, digunakan penguat non-inverting,
Untuk penguatan non-inverting dengan R1=10kΩ:
Ω = → + = → +
= 26.740
10000 1 674 , 3 1 1 f f f R R R R Av
- Untuk pengurangnya, digunakan rangkaian pengurang/subtractor dengan
nilai setiap R = 10kΩ
- Untuk pengurangan nilai tegangan sebesar 9,559Volt dengan menggunakan
pembagi tegangan, dengan tegangan masukan sebesar 12Volt dan R1 = 10kΩ
yaitu: Ω = = × + → = × + k R R R V V R R R OUT in 160 , 39 559 , 9 12 10000 2 2 2 2 1 2
Jadi rangkaian pengondisi sinyal pada sensor suhu seperti gambar 3.3,
dimana dengan nilai praktisnya adalah sebagai berikut:
Untuk R =26,74kΩ diganti dengan menghubungkan dua buah resistor
dengan nilai 22kΩ dan 4,7kΩ, dan untuk nilai R=39,160kΩ diganti dengan
Gambar 3.3. Pengondisi Sinyal Sensor Suhu
3.1.3 VCO I
Dalam perancangan ini, batasan frekuensi yang dirancang dari 2kHz
samapai 7kHz. Untuk merancang batasan frekuensi tersebut, ditentukan dengan
menentukan nilai R1, R2 dan C pada rangkaian external VCO dari IC CD4046B.
Nilai dari rangkaian tersebut, dapat ditentukan dengan melihat grafik pada
datasheet dari IC CD4046B. Nilai C dapat dilihat pada figure 4 dan nilai
perbandingan R1 dan R2 dapat dtentukan dari figure 8. Untuk menen tukan nilai
C, terlebih dahulu harus menentukan center frequency ( f )o dan untuk
menentukan nilai R1 dan R2, terlebih dahulu harus menentukan batasan
maksimun dan minimum frekuensi.
Untuk VCO I, batas frekuensi yang dipakai adalah dari 2kHz sampai
7kHz dan nilai f o adalah 4,5kHz, yang diperoleh dari rumus pada datasheet
L MIN o
MIN MAX L
f f f
f f f
+ =
− = 2
Jadi untuk menghasilkan batasan frekuensi tersebut, menggunakan C = 10nF, R1=
15kΩ dan R2= 56kΩ seperti gambar rangkaian VCO I pada gambar 3.4.
Gambar 3.4 VCO I
3.2.
Pengukuran Tekanan
Pada bagian pengukuran tekanan, terdiri dari sensor tekanan
MPX4100, pengondisi sinyal II dan VCO II seperti pada gambar 3.1.
3.2.1.Sensor Tekanan Udara
Untuk sensor tekanan udara menggunakan MPX4100 dan untuk
perancangan dibatasi pengukurannya pada 30 kPa sampai 90kPa. Untuk keluaran
tegangan pada Sensor dapat dilihat pada grafik 3.2, yaitu grafik tekanan udara
dalam kPa terhadap output tegangan dalam volt.
+5Volt C2
10n
R2 56k
Penjumlah U1
CD4046B
1 2 3
4 5
9
10 13 14
16 6 7 11 12 15
PHPULSE PHCOMP I OUT COMP IN
VCO OUT INH
VCO IN
DEMOD OUT PHCOMP II OUT SIG IN
Grafik 3.2. Perbandingan Vout dengan tekanan udara
Pada perancangan sensor, yang dipakai hanya kaki 1 yang merupakan
VOUT, kaki 2 yang dihubungkan dengan ground dan kaki 3 yang dihubungkan
dengan V sumber yaitu 5,1 volt DC.
3.2.2.
Pengondisi Sinyal II
Pengondisi sinyal pada sensor tekanan udara yang dirancang dengan
menggunakan data Vin pada VCO, agar menghasilakan frekuensi keluaran sesuai
dengan perancangan, yaitu frekuensi minimum adalah 8kHz yaitu tegangan
masukannya adalah 1,269Volt dan frekuensi maksimum adalah 13kHz yaitu pada
tegangan 3,992Volt. Nilai ini didapat dari hasil pengukuran perancangan VCO,
seperti pada tabel 3.2 dibawah ini dengan menggunakan nilai C = 1nF, R1=
184kΩ, R2= 200kΩ dan VDD= 5 Volt.
Untuk tegangan input pada pengondisi sinyal adalah tegangan keluaran
sensor sebagai x, dan tegangan keluaran pengondisi sinyal adalah tegangan
Tabel 3.2. Hasil Pengujian awal VCO II IN V (Volt) out f (kHz) 0 7,410 1,269 8,002 1,816 9,010 2,356 10,055 2,580 10,492 2,843 11,007 3,349 11,991 3,92 13,062 5,06 13,837
Dibawah ini adalah grafik perancangannya. Untuk tegangan input pada
pengondisi sinyal adalah 0,8volt sampai 4,1volt:
Grafik 3.3. Perancangan Pengondisi Sinyal Sensor Tekanan Udara
Persamaan y = 0,803x +0,626 pada grafik 3.1 diperoleh dengan menggunakan
prinsip persamaan 2.16 dengan perhitungan sebagai berikut:
Untuk nilai kemiringan (m)dihitung sebagai berikut:
803 , 0 3 , 3 651 , 2 8 , 0 1 , 4 269 , 1 92 , 3 1 2 1
2 = =
− − = − − = x x y y m
Untuk nilai offset (c) dihitung sebagai berikut:
626 , 0 6424 , 0 269 , 1 8 , 0 803 , 0 269 , 1 803 , 0 = − = + × = + = c c c x y
y = 0.803x + 0.626
0 1 2 3 4 5
0.5 2.5 4.5
Tegangan Keluar an Pen g o n di si Siny al (Volt DC )
Tegangan Keluaran Sensor Tekanan (Volt DC)
TEKANAN
Dari hasil di atas, dapat dirancang pengondisi sinyal sebagai berikut:
y = 0.803x + 0,626
- Untuk penguatannya, digunakan penguat inverting, Untuk penguatan
inverting 0,803 dengan R1=10kΩ:
Ω =
→ =
→
= 8030
10000 803
, 0
1
f f
f
R R
R R Av
- Untuk penjumlahnya, digunakan penjumlah non inverting dengan nilai setiap
R = 10kΩ
- Untuk penambahan nilai tegangan sebesar 0,626Volt dengan menggunakan
pembagi tegangan, dengan tegangan masukan sebesar 5Volt dan R1 = 10kΩ
yaitu:
Ω =
= × + →
= × +
184 , 1431
626 , 0 5 10000
2
2 2
2 1
2
R
R R V
V R R
R
OUT in
Jadi rangkaian pengondisi sinyal pada sensor tekanan udara seperti gambar
3.5, yaitu dengan nilai praktisnya adalah sebagai berikut:
Untuk
R
=
8030
Ω
diganti dengan menghubungkan dua buah resistor dengannilai 6,8kΩ dan 1,2kΩ, dan untuk nilai R=1431,184Ω diganti dengan
menghubungkan dua buah resistor dengan nilai 1kΩ dan 470Ω
3.2.3.
VCO II
Dalam perancangan ini, batasan frekuensi yang dirancang dari 8kHz
samapai 13kHz. Untuk merancang batasan frekuensi te