Perancangan dan Realisasi Sistem Kendali Kontinyu &
Digital pada Plant Debit Air dengan Metode
Ziegler-Nichols & Coohen-Coon menggunakan Matlab dan
Arduino
Laporan ini disusun untuk memenuhi salah satu syarat menyelesaikan mata kuliah Sistem
Kendali Kontinyu & Digital
DIPLOMA III PROGRAM STUDI TEKNIK ELEKTRONIKA Di Jurusan Teknik Elektro
Oleh
Mochammad Iqbal Try Wijaya
131311053
POLITEKNIK NEGERI BANDUNG
2015
Abstrak
Sistem kendali debit air telah banyak digunakan di berbagai industry, semisal industri minuman. Sistem kendali debit air pun seingkali ditemukan di Perusahaan pembangkit listrik tenaga air. Sistem ini dibutuhkan untuk mengatur kecepatan aliran air yang bisa menggerakan generator sehingga nantinya akan menghasilkan listrik. Dalam mengatur kecepatan aliran air di pembangkit listrik tenaga air, tentu saja tidak dapat dilakukan secara manual, oleh karena itu, dibuatlah sebuah sistem kendali untuk mengendalikan aliran air. Sistem ini dikendalikan dengan metode Proportional–Integral–Derivative (PID). Sebuah metode yang menggunakan prinsip penguatan posisi, penguatan integral, dan penguatan derivative untuk memperbaiki respon sistem kendali. Untuk mendapatkan nilai-nilai parameter PID, dapat digunakan beberapa metode desain kendali, yaitu Ziegler-Nichols tipe 1 dan 2, Cohen-Coen. Hasil dari pemodelan melalui kedua metode tersebut, nilai parameter-parameter pengendali PID dapat menghasilkan respon sistem kendali yang lebih responsif dibandingkan dengan tanpa pengendali. Sistem kendalii ini selain dapat digunakan untuk industri kecil, dapat pula digunakan untuk industri skala besar, contohnya seperti Pembangkit Listrik Tenaga Air.
Kata kunci : PID, Ziegler-Nichols tipe 1, Ziegler Nichols tipe 2, Cohen-Coen, Sistem Kendali debit air dengan Pengendali PID, Pemodelan.
Abstract
Flow water control system is very much applicated in industrial world, like drink industry. This control system usually found in Hidroelectryc Power Plant. This control system is needed to control the flow water that can move the generator to produce electricity. In controlling the flow water, can’t be by manual system. So that’s the purpose of control system exist. This system use Proportional–Integral– Derivative (PID) method. A methods that use position, integral, and derivative reinforcement principal to fixing control system responses. To obtain the value of PID, we can use some methods like Ziegler-Nichols I and II, and Cohen-Coen. With modelling through two methods above, PID controller can generate control system responses which more responsive compared without controller. This Control system is can be used not for small industry but also large industry, such as Hidroelectryc Power Plant.
Keywords : PID, Ziegler-Nichols type 1, Ziegler Nichols type 2, Cohen-Coen, Flow Water Control System with PID Controller, Modelling.
KATA PENGANTAR
Bismillahirrahmaanirrahiim. Assalamu‟alaikum Wr. Wb.
Alhamdulillahirobbil‟alamin segala puji syukur penulis panjatkan ke hadirat Allah S.W.T, karena atas limpahan rahmat dan hidayah-Nya penulis dapat menyelesaikan “Perancangan dan Realisasi Sistem Kendali Kontinyu & Digital pada Plant Debit Air dengan Metode Ziegler-Nichols & Coohen-Coon menggunakan Matlab dan Arduino”. Laporan akhir ini disusun sebagai persyaratan kelulusan pada Mata Kuliah Sistem Kendali Digital Program Studi D3-Teknik Elektronika Departemen Elektro Polieknik Negeri Bandung.
Dalam penyusunan Tugas Akhir ini penulis banyak mendapat saran, semangat, bimbingan dari teman-teman baik secara materil maupun moril. Oleh karena itu penulis mengucapkna terima kasih kepada:
1. Bapak Feriyonika , ST.M.Sc.Eng selaku dosen Mata Kuliah Sistem Kendali Digital.
2. Rahmawati Zakiyah selaku rekan satu grup dalam praktikum Sistem Kendali Digital.
3. Kedua orang tua yang selalu memberikan dukungan dan doanya.
4. Kedua kakak penulis yang telah memberikan dukungan mental dalam penulisan laporan akhir praktikum ini.
5. Seluruh teman-teman Program Studi D3-Teknik Elektronika Departemen Teknik Elektro Politeknik Negeri Bandung angkatan 2013 yang telah memberikan motivasi.
6. Semua pihak yang tidak dapat penulis sebutkan satu per satu yang telah banyak membantu sehingga laporan akhir praktikum ini dapat diselesaikan.
Dalam penyusunan laporan akhir ini, penulis menyadari masih terdapat banyak kekurangan yang dibuat baik sengaja maupun tidak sengaja, dikarenakan keterbatasan ilmu pengetahuan dan wawasan serta pengalaman yang penulis miliki. Untuk itu penulis mohon maaf atas
segala kekurangan tersebut tidak menutup diri terhadap segala saran dan kritik serta masukan yang bersifat kontruktif bagi diri penulis. Akhir kata semoga dapat bermanfaat bagi penulis sendiri, dan kalangan luas.
Wassalamu „alaikum Wr. Wb.
Bandung, Juli 2015
DAFTAR ISI
Abstract ... ii
KATA PENGANTAR ... iii
DAFTAR ISI ... v
DAFTAR TABEL ... vii
DAFTAR GAMBAR ... viii
BAB I PENDAHULUAN ... 1
1.1. Latar Belakang Masalah ... 1
BAB II DASAR TEORI ... 6
2.1. Perkembangan Sistem Kendali ... 6
2.1.1. Sistem Kendali Loop Terbuka ... 7
2.1.2. Sistem Kendali Loop Tertutup ... 9
2.1.3. Bagian / Elemen Sistem Kendali ... 10
2.2. Sistem Kendali PID ... 11
2.2.1. Kontrol Proporsional (Kp) ... 15
2.2.2. Kontrol Integratif (Ki) ... 16
2.2.3. Kontrol Derivatif (Kd) ... 17
2.3. Desain Kendali PID ... 18
2.3.1. Metode Ziegler-Nichols Tipe 1 ... 19
2.3.2. Metode Ziegler-Nichols Tipe 2 ... 20
2.3.3. Metode Cohen-Coen Open Loop ... 21
2.3.4. Manual Tunning ... 22
2.4. Perangkat Lunak (Software) MATLAB ... 22
2.5. Modul Miktrokontroller Arduino Uno ... 23
BAB 3 PERANCANGAN SISTEM KENDALI DEBIT AIR ... 25
3.1 Desain PID Ziegler-Nichols Tipe 1 ... 25
3.2 Desain PID Ziegler-Nichols Tipe 2 ... 26
3.2.1 Kondisi Mulai Berosilasi ... 26
3.2.2 Kondisi Saat Berosilasi ... 27
3.3 Desain PID Cohen-Coen ... 28
3.4 Desain PID Arduino-Matlab ... 29
3.5 Desain PID Stand-Alone Arduino ... 32
BAB 4 HASIL DAN PEMBAHASAN... 35
4.1. Desain Kendali dengan Metode Ziegler-Nichols Tipe I ... 35
4.2. Desain Kendali dengan Metode Ziegler-Nichols Tipe II ... 35
4.3. Desain Kendali dengan Metode Cohen-Coen ... 38
4.4. Desain Kendali dengan Metode Arduino-Matlab Script ... 39
BAB 5 KESIMPULAN DAN SARAN ... 43
5.1. Kesimpulan ... 43
5.2. Saran ... 44
DAFTAR TABEL
Tabel 2. 1. Fungsi Komponen P, I, dan D pada Pengendali PID ... 13
Tabel 2. 2. Penghitungan Kp, Ki, dan Kd Ziegler Nichols Tipe 1 ... 20
Tabel 2. 3. Penghitungan Kp, Ki, dan Kd Ziegler Nichols Tipe 2 ... 21
Tabel 2. 4: Parameter Perhitungan PID (Kp,Ti,Td) ... 22
Tabel 3. 1 Nilai Kp, Ki, dan Kd Ziegler Nichols Tipe 1 ... 26
Tabel 3. 2 Nilai Kp, Ki, dan Kd Ziegler Nichols Tipe 2(mulai osilasi) ... 26
Tabel 3. 3 Nilai Kp, Ki, dan Kd Ziegler Nichols Tipe 2(saat osilasi) ... 27
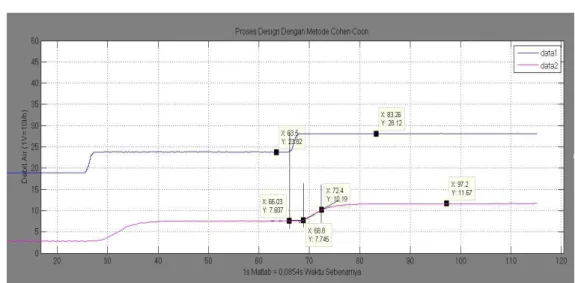
Tabel 3. 4 Proses Desain dengan Metode Cohen Coon ... 28
Tabel 3. 5 Nilai Kp, Ki, dan Kd Cohen-Coen ... 28
Tabel 4. 1. Nilai Kp, Ki, dan Kd Ziegler Nichols Tipe 1 ... 35
Tabel 4. 2. Nilai Kp, Ki, dan Kd Ziegler Nichols Tipe II ... 36
Tabel 4. 3. Nilai Kp, Ki, dan Kd Ziegler Nichols Tipe II ... 37
Tabel 4. 4. Nilai Kp, Ki, dan Kd Ziegler Nichols Tipe II ... 38
DAFTAR GAMBAR
Gambar 2. 1. Centrifugal Governor by James Watt... 6
Gambar 2. 2. Paper Pembuatan Sistem Kendali Stir Kapal Laut oleh Minorsky, Hazen, dan Nyquist ... 7
Gambar 2. 3. Diagram Blok Sistem Kendali Loop Terbuka ... 8
Gambar 2. 4. Diagram Blok Sistem Kendali Loop Tertutup... 9
Gambar 2. 5. Diagram Blok Sistem Kendali dengan Pengontrol PID ... 12
Gambar 2. 6. Respon Awal Sistem Kendali dengan Pengendali PID ... 14
Gambar 2. 7. Respon Sistem Kendali berdasarkan Rise Time ... 14
Gambar 2. 8. Respon Sistem Loop Terbuka ... 19
Gambar 2. 9. Respon Sistem Osilasi ... 20
Gambar 2. 10. Logo Simulink MATLAB ... 23
Gambar 2. 11. Arduino Uno ... 24
Gambar 3. 1 Respon Sistem Open Loop ... 25
Gambar 3. 2. Pemplotan untuk Mencari Nilai T dan L ... 25
Gambar 3. 3. Hasil Respon Steady State saat Respon Kondisi Awal Osilasi ... 26
Gambar 3. 4Hasil Respon Steady State saat Respon Kondisi Osilasi Maksimal 27 Gambar 3. 5Proses Desain dengan Metode Cohen Coon ... 28
Gambar 3. 6: Flowchat Script-Matlab ... 29
Gambar 3. 7: Script menentukan pin output arduino, time sampling dan parameter PID (nilai terdapat pada praktikum sebelumnya)... 30
Gambar 3. 8: Script menentukan Proses Value dan Perhitungan Error secara berulang menggunakan while ... 30
Gambar 3. 9: Script menentukan nilai VID agar tidak > dari 10, < dari 0 dan membulatkan nilai hasil keluaran dari PID ... 31
Gambar 3. 10 : Script membaca input hasil PID pada Arduino, menentukan Plot ... 31
Gambar 3. 11 : Flowchart Program Stand-Alone Arduino ... 32
Gambar 3. 12 : Program Stand-Alone Arduino ... 33
Gambar 3. 13 : Program Stand-Alone Arduino ... 33
Gambar 3. 14 : Program Stand-Alone Arduino ... 34
Gambar 4. 1 Gelombang ZN-1 pada scope ... 35
Gambar 4. 3 Respon Untuk kondisi Mulai Osilasi ... 37
Gambar 4. 4 Gelombang ZN-2 pada scope untuk kondisim osilasi maksimal ... 37
Gambar 4. 5 Respon Untuk kondisi Osilasi Maksimal ... 38
Gambar 4. 6 Hasil Desain Manual Tunning saat Respon Osilasi Maksimal ... 38
Gambar 4. 7 Hasil Respon Akhir ... 39
Gambar 4. 8 : Hasil gelombang output dari PLANT pada Matlab ... 39
Gambar 4. 9 : Hasil gelombang output dari PLANT pada Matlab ... 40
Gambar 4. 10 : Hasil gelombang output dari PLANT pada Matlab ... 40
Gambar 4. 11 : Hasil Setpoint dan Feedback Sistem Kendali Debit Air pada.... 41
Gambar 4. 12 : Hasil Proses Setpoint dan Feedback di Serial Monitor ... 41
BAB I
PENDAHULUAN
1.1. Latar Belakang Masalah
Sistem Kendali Debit Air sangat banyak digunakan di dalam dunia industri saat ini. Misalnya pada industri minuman dan pembangkit listrik tenaga air. Sistem kendali ini sangat berguna di pembangkit listrik tenaga air, karena dapat mengendalikan kecepatan aliran air untuk menggerakan generator penghasil listrik. Tetapi dalam mengendalikan kecepatan aliran air, tidak dapat dilakukan secara manual, sehingga dibuat lah sebuah sitem kendali yang mengendalikan debit air. Sistem ini bekerja berdasarkan nilai-nilai Proportional–Integral–Derivative (PID). Nilai-nilai ini yang akan menentukan bagaiman respon seharusnya untuk sebuah sistem kendali. Nilai-nilai tersebut didapat dari berbagai metode untuk desain kendali, antara lain Ziegler-Nichols I, Ziegler-Nichols II, Cohen-Coen.
Semua metode desain kendali tersebut menghasilkan nilai-nilai PID, yang membedakan adalah apakah plant yang digunakan cocok dengan metode desain kendali tersebut atau tidak. Tujuan dalam praktek ini adalah untuk merancang sebuah sistem kendali berdasarkan metode-metode yang telah disebutkan tadi. Juga untuk membuktikan apakah plant yang kita kendalikan cocok atau tidak dengan metode-metode yang sudah dipelajari. Metode yang pertama kali dilakukan adalah mendesain sistem kendali dengan metode Ziegler-Nichols I lalu dilanjut dengan Ziegler-Nichols II dan Cohen-Coen. Metode selanjutnya adalah kita membuat sebuah program melalui arduino matlab, dimana nilai PID yang digunakan adalah nilai PID yang berasal dari Ziegler-Nichols I dan II atau Cohen-Coen. Tahap akhir yang dilakukan adalah stand alone arduino, dimana hanya arduino saja yang digunakan untuk
mengendalikan plant debit air. Stand-Alone arduino merupakan tahap akhir dari praktikum sistem kendali digital.
6
BAB II
DASAR TEORI
2.1. Perkembangan Sistem Kendali
Sistem kendali memiliki peranan penting dalam perkembangan teknologi dalam berbagai bidang. Contoh penggunaan sistem kendali di industri adalah memberikan kemudahan dalam meningkatkan kualitas, menurunkan biaya produksi, meningkatkan laju produksi serta menggantikan pekerjaan yang bersifat rutin dan membosankan. Selain dunia industri, penggunaan sistem kendali juga memiliki peranan penting di dalam dunia militer, transportasi, dan sistem kendaraan luar angkasa. Aplikasi sistem kendali saat ini tidaklah lepas dari penelitian tentang sistem kendali yang dilakukan pada zaman dahulu. Di mana pada zaman dahulu, mayoritas penggunaan sistem kendali adalah dengan menggunakan sistem kendali on-off. Namun seiring berkembangnya teknologi di berbagai bidang, sistem kendali dengan metode lain mulai bermunculan. Diantaranya adalah sistem kendali PID dan Fuzzy.
Perangkat kendali otomatis yang berhasil dibuat pertama kali adalah pengatur sentrifugal untuk pengendali kecepatan mesin uap pada abad ke-18 oleh James Watt yang diperlihatkan pada Gambar 2.1.
Gambar 2. 1. CentrifugalGovernorby James Watt
Pengendali berikutnya yang berhasil dibuat pada awal periode perkembangan sistem kendali adalah perangkat pengendali otomatis untuk stir kapal laut oleh Minorsky, Hazen, dan Nyquist pada sekitar
tahun 1922. Mereka juga menunjukkan tingkat kestabilan yang dapat ditentukan dari persamaan-persamaan yang mendeskripsikan sistem tersebut. Gambar 2.2 menunjukan paper tentang pembuatan sistem kendali stir kapal laut yang dilakukan oleh Minorsky, Hazen, dan Nyquist.
Gambar 2. 2. Paper Pembuatan Sistem Kendali Stir Kapal Laut oleh Minorsky, Hazen, dan Nyquist
Secara garis besar, sistem kendali dibagi menjadi dua kategori besar, yaitu sistem kendali loop terbuka dan sistem kendali loop tertutup. Dan sistem kendali juga memiliki bagian atau elemen yang digunakan untuk dapat merancang dan mendesain sebuah sistem kendali. Beberapa hal ini akan dijelaskan lebih lanjut pada penjelasan di bawah ini(Aldi, 2014:6 ).
2.1.1. Sistem Kendali Loop Terbuka
Sistem Kendali Loop Terbuka adalah suatu sistem kendali yang keluarannya tidak akan berpengaruh terhadap aksi kendali. Sehingga keluaran sistem tidak dapat diukur dan tidak dapat digunakan sebagai
perbandingan umpan balik dengan masukan. Jadi pada setiap masukan akan didapatkan suatu kondisi operasi yang tetap. Sedangkan ketelitiannya akan tergantung pada kalibrasi. Dalam prakteknya, sistem kendali loop terbuka dapat digunakan jika hubungan output dan inputnya diketahui serta tidak adanya gangguan internal dan eksternal. Sistem kendali loop terbuka dapat digambarkan melalui diagram blok pada Gambar 2.3.
Gambar 2. 3. Diagram Blok Sistem Kendali Loop Terbuka
Sistem kendali loop terbuka memiliki kelemahan dan keunggulan. Kelemahan dari sistem kendali ini adalah sebagai berikut:
1. Tidak tahan gangguan dan perubahan kalibrasi.
2. Untuk menjaga kualitas yang diingankan pada keluaran perlu kalibrasi ulang dari waktu ke waktu.
Sedangkan kelebihan dari sistem kendali loop terbuka adalah sebagai berikut:
1. Kestabilan bukan merupakan persoalan utama. 2. Harga yang murah.
3. Cocok untuk keluaran yang susah diukur. 4. Mudah dirawat.
Sehingga dapat disimpulkan bahwa sistem kendali loop terbuka adalah sistem kendali yang tidak mengutamakan kestabilan dan tidak tangguh terhadap gangguan. Namun sistem kendali ini mudah untuk digunakan dan murah dari segi finansial(Aldi, 2014:7).
2.1.2. Sistem Kendali Loop Tertutup
Sistem kendali loop tertutup adalah suatu sistem kendali yang keluarannya berpengaruh langsung terhadap aksi kendali. Sistem ini berupaya untuk mempertahankan keluaran sehingga hampir sama bahkan sama dengan masukan acuan walaupun terdapat gangguan pada sistem. Sistem ini adalah sistem kendali berumpan balik, dimana kesalahan (error) penggerak adalah selisih antara sinyal masukan dan sinyal umpan balik (berupa sinyal keluaran dan turunannya) yang diteruskan ke pengendali (controller) sehingga melakukan aksi terhadap proses untuk memperkecil kesalahan dan membuat agar keluaran mendekati harga yang diingankan. Sistem kendali loop tertutup dapat digambarkan dengan diagram blok seperti pada Gambar 2.4.
Gambar 2. 4. Diagram Blok Sistem Kendali Loop Tertutup
Sama halnya seperti sistem kendali loop terbuka, sistem kendali loop tertutup juga memiliki kelemahan dan kelebihan. Kelemahan dari sistem kendali ini adalah sebagai berikut:
1. Sulit dalam hal desain dan perancangan, karena perlu memperhatikan kepresisian dan keakuratan sistem.
2. Harga relatif mahal.
3. Perawatan relatif sulit dilakukan.
Sedangkan kelebihan dari sistem ini adalah sebagai berikut:
2. Sistem lebih dinamis, sehingga kecepatan respon dapat diatur sesuai keinginan.
3. Tahan terhadap gangguan yang dihadapi.
4. Cocok digunakan untuk sistem yang komplek dan keluaran yang terukur.
Dapat disimpulkan bahwa sistem kendali loop tertutup adalah sistem kendali yang menjamin kepresisian, keakuratan, dan ketangguhan sistem terhadap gangguan. Namun dalam perancangan dan pendesainannya lebih sulit dan membutuhkan harga yang lebih mahal daripada sistem kendali loop tertutup(Aldi, 2014:9).
2.1.3. Bagian / Elemen Sistem Kendali
Pada perancangan sistem kendali haruslah diperhatikan bagian ataupun elemen dari sistem itu sendiri. Karena sistem kendali akan memanipulasi suatu masukan yang akan mengendalikan suatu keluaran, maka tentunya akan ada pula bagian yang dapat mengendalikan dan memanipulasi hal tersebut. Berikut akan dijelaskan mengenai bagian ataupun elemen dari sistem kendali(Aldi, 2014:10).
2.1.3.1. Variabel Terkontrol dan Variabel Termanipulasi
Variabel terkontrol (controlled variable) adalah kuantitas atau kondisi yang diukur dan dikendalikan. Variabel termanipulasi (Manipulated Variable) adalah kuantitas atau kondisi yang divariasikan oleh kontroler sehingga mengakibatkan adanya efek kepada nilai variabel terkontrol. Umumnya, variabel terkontrol adalah keluaran (output) dari sistem. Kontrol berarti mengukur nilai dari variabel terkontrol dan menerapkan variabel termanipulasi untuk mengoreksi nilai aktual menjadi nilai yang diinginkan (reference) (Aldi, 2014:10).
2.1.3.2. Plant
Plant dapat berupa peralatan ataupun seperangkat bagian mesin yang bekerja sama dengan tujuan untuk mencapai suatu operasi tertentu.
Contohnya dapat berupa obyek fisik yang dapat dikendalikan (peralatan mekanik, tungku pemanas, reaktor kimia, kendaraan angkasa) (Aldi, 2014:10).
2.1.3.3. Pengendali (Controller)
Pengendali (Controller) adalah bagian pada sistem kendali yang berfungsi untuk memanipulasi masukan sistem agar sistem bekerja sesuai dengan yang diinginkan. Bagian ini memiliki peranan yang sangat penting dalam sistem kendali. Karena bagian ini merupakan bagian inti dari sebuah sistem kendali, di mana sebuah sistem akan dikendalikan pada bagian ini(Aldi, 2014:11).
2.1.3.4. Gangguan (Disturbance)
Gangguan (disturbance) adalah sebuah sinyal yang cenderung merugikan nilai keluaran (output) sistem. Jika gangguan dihasilkan oleh sistem, maka ia disebut sebagai gangguan internal, sebaliknya apabila gangguan dihasilkan dari luar sistem, maka ia disebut sebagai gangguan eksternal(Aldi, 2014:11).
2.1.3.5. Sensor (Transduser)
Sensor (transduser) adalah suatu komponen elektronika yang berfungsi untuk mengubah besaran fisik (non-listrik) menjadi tegangan listrik. Hal ini digunakan untuk memanipulasi sebuah besaran fisik untuk dapat diolah dan dikendalikan agar menghasilkan keluaran pada plant sesuai dengan yang diinginkan pada sistem kendali. Pada sistem kendali loop tertutup, keluaran dari sensorlah yang menjadi umpan balik (feedback) (Aldi, 2014:11).
2.2. Sistem Kendali PID
Sistem kendali yang digunakan di berbagai bidang dituntut untuk memiliki kepresisian dan tingkat keakuratan yang cukup tinggi. Dan sistem tersebut dituntut pula memiliki kedinamisan yang baik, sehingga respon sistem dapat diatur sesuai dengan keinginan. Sehingga dibuatlah
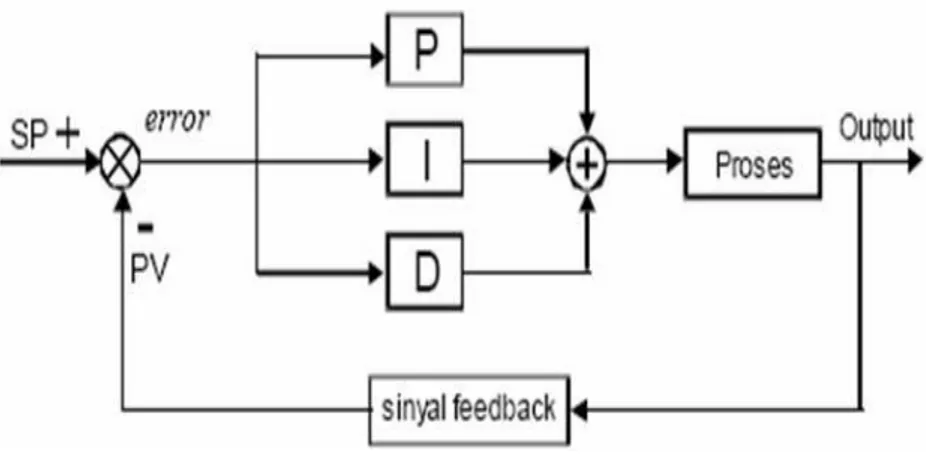
sebuah pengendali (controller) sehingga proses kendali dapat menjadi lebih efektif dan efisien. Ada berbagai metode yang digunakan dalam sistem kendali. Salah satunya adalah sistem kendali dengan Proportional-Integral-Derivative (PID) Controller. PID merupakan kontroler untuk menentukan presisi suatu sistem instrumentasi dengan karakteristik adanya umpan balik pada sistem tesebut. Pengontrol PID adalah pengontrol konvensional yang banyak dipakai dalam dunia industri. Pengontrol PID akan memberikan aksi kepada aktuator berdasarkan besar error yang diperoleh. Aktuator akan mengatur keluaran pada plant sesuai yang diinginkan disebut dengan Set Point. Error adalah perbedaan dari Set Point dengan keluaran aktual pada plant. Diagram blok sistem kendali dengan pengendali PID dapat dilihat pada Gambar 2.5.
Gambar 2. 5. Diagram Blok Sistem Kendali dengan Pengontrol PID
Dari Gambar 2.5 dapat diketahui bahwa pengendali PID akan mengendalikan galat (error) yang dihasilkan dari penjumlahan masukan (set point) dengan sinyal umpan balik (feedback). Sinyal umpan balik didapat dari keluaran plant yang berasal dari sensor pada plant tersebut. Keluaran dari pengendali PID akan mengaktifkan aktuator pada plant. Proses terus berulang hingga antara sinyal set point dengan sinyal galat selisihnya sama dengan nol. Pada pengendali PID diketahui terdapat tiga komponen, yaitu Proportional (Kp), Integratif (Ki), dan Derivatif (Kd).
Komponen tersebut memiliki fungsi tersendiri pada pengendali PID. Secara matematis, persamaan umum pengendali PID adalah:
( ) ( ) ∫ ( ) ( ) (1) Keterangan: ( ) = Set point ( ) = Galat (error) Karena ∫ () (2) Maka ( ) ( ) ( ) ( ) (3) Sehingga: ( ) ( ) ( ) (4)
Karena komponen-komponen P, I, dan D pada pengendali PID memiliki fungsi tersendiri, maka perubahan nilai komponen-komponen tersebut sangat berpengaruh terhadap respon sistem kendali. Fungsi komponen-komponen tersebut dapat dilihat pada Tabel 2.1.
Tabel 2. 1. Fungsi Komponen P, I, dan D pada Pengendali PID
Parameter Rise Time Overshoot Setting Time S-S Error
Proportional Berkurang Bertambah Minor Change Berkurang Integratif Berkurang Bertambah Bertambah Menghilangkan Derivatif Minor Change Berkurang Bertambah Minor Change
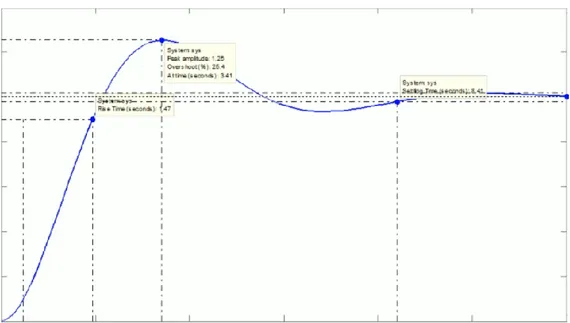
Dengan memperhatikan fungsi komponen tersebut, pengendali PID menghasilkan respon sistem awal seperti ditunjukan pada Gambar 2.6.
Gambar 2. 6. Respon Awal Sistem Kendali dengan Pengendali PID
Dalam sistem kendali PID ada beberapa parameter yang juga harus diperhatikan selain komponen-komponen penyusunnya. Seperti ditunjukkan pada tabel 2.1 dan Gambar 2.6 parameter tersebut adalah rise time, overshoot, settling time, dan steady state error (s-s error). Rise Time (Waktu Naik) adalah waktu yang diperlukan oleh sistem untuk dapat naik dari titik nol menuju titik mantap (steady state). Berdasarkan rise time, respon sistem kendali dibagi menjadi tiga jenis, yaitu Over Damp, Under Damp, dan Critical Damp. Perbedaan ketiga respon tersebut dapat dilihat pada Gambar 2.7.
Gambar 2.7 memperlihatkan tiga respon sistem kendali yang berbeda. Gelombang A dan C memperlihatkan kondisi over damp. Sedangkan gelombang B memperlihatkan kondisi under damp. Dan gelombang D memperlihatkan kondisi critical damp.
Parameter selanjutnya adalah overshoot. Overshoot adalah perbandingan selisih harga maksimum dengan harga akhir sistem. Secara matematis, overshoot dapat dicari dengan rumus berikut:
(5) Paramater yang lain adalah settling time. Settling time adalah waktu yang dibutuhkan agar respon sistem mencapai dan tetap berada di dalam batas-batas dengan nilai akhir dan dinyatakan pada 2% atau 5 %. Secara matematis settling time dapat diperoleh dengan cara:
( )
(6)
( )
(7)
Parameter terakhir adalah steady state error. Steady state error adalah selisih antara respon sistem saat steady state dengan set point. Keempat parameter tersebut dapat dikurangi dan ditambahkan dengan mengubah-ubah nilai komponen P, I, dan D pada pengendali PID sesuai dengan keinginan desainer. Penjelasan tentang komponen tersebut akan dijelaskan lebih lanjut pada pembahasan di bawah(Aldi, 2014:11).
2.2.1. Kontrol Proporsional (Kp)
Kontrol P jika G(s) = kp, dengan k adalah konstanta.
Jika ( ) ( ) ( ) (8)
Maka ( ) ( ) (9)
Dengan Kp adalah Konstanta Proporsional. Kp berlaku sebagai Gain (penguat) saja tanpa memberikan efek dinamik kepada kinerja kontroler. Penggunaan kontrol P memiliki berbagai keterbatasan karena sifat kontrol yang tidak dinamik ini. Walaupun demikian dalam aplikasi-aplikasi dasar yang sederhana kontrol P ini cukup mampu untuk
memperbaiki respon transien khususnya rise time dan settling time. Pengontrol proporsional memiliki keluaran yang sebanding/proporsional dengan besarnya sinyal kesalahan (selisih antara besaran yang diinginkan dengan harga aktualnya).
Ciri-ciri pengontrol proporsional :
1. Jika nilai Kp kecil, pengontrol proporsional hanya mampu melakukan koreksi kesalahan yang kecil, sehingga akan menghasilkan respon sistem yang lambat (menambah rise time). 2. Jika nilai Kp dinaikkan, respon/tanggapan sistem akan semakin
cepat mencapai keadaan mantapnya (mengurangi rise time).
3. Namun jika nilai Kp diperbesar sehingga mencapai harga yang berlebihan, akan mengakibatkan sistem bekerja tidak stabil atau respon sistem akan berosilasi.
4. Nilai Kp dapat diset sedemikian sehingga mengurangi steady state error, tetapi tidak menghilangkannya(Aldi, 2014:15).
2.2.2. Kontrol Integratif (Ki)
Pengontrol Integral berfungsi menghasilkan respon sistem yang memiliki kesalahan keadaan mantap nol (Error Steady State = 0 ). Jika sebuah pengontrol tidak memiliki unsur integrator, pengontrol proporsional tidak mampu menjamin keluaran sistem dengan kesalahan keadaan mantapnya nol.
Jika G(s) adalah kontrol I maka u dapat dinyatakan sebagai:
( ) ∫ ( ) (10)
Dengan Ki adalah konstanta Integral, dan dari persamaan di atas, G(s) dapat dinyatakan sebagai:
( ) ( )
(11)
Jika e(T) mendekati konstan (bukan nol) maka u(t) akan menjadi sangat besar sehingga diharapkan dapat memperbaiki error. Jika e(T) mendekati nol maka efek kontrol I ini semakin kecil. Kontrol I dapat memperbaiki sekaligus menghilangkan respon steady-state, namun
pemilihan Ki yang tidak tepat dapat menyebabkan respon transien yang tinggi sehingga dapat menyebabkan ketidakstabilan sistem. Pemilihan Ki yang sangat tinggi justru dapat menyebabkan output berosilasi karena menambah orde sistem.
Keluaran pengontrol ini merupakan hasil penjumlahan yang terus menerus dari perubahan masukannya. Jika sinyal kesalahan tidak mengalami perubahan, maka keluaran akan menjaga keadaan seperti sebelum terjadinya perubahan masukan. Sinyal keluaran pengontrol integral merupakan luas bidang yang dibentuk oleh kurva kesalahan / error.
Ciri-ciri pengontrol integral :
1. Keluaran pengontrol integral membutuhkan selang waktu tertentu, sehingga pengontrol integral cenderung memperlambat respon. 2. Ketika sinyal kesalahan berharga nil, keluaran pengontrol akan
bertahan pada nilai sebelumnya.
3. Jika sinyal kesalahan tidak berharga nol, keluaran akan menunjukkan kenaikan atau penurunan yang dipengaruhi oleh besarnya sinyal kesalahan dan nilai Ki.
4. Konstanta integral Ki yang berharga besar akan mempercepat hilangnya offset. Tetapi semakin besar nilai konstanta Ki akan mengakibatkan peningkatan osilasi dari sinyal keluaran pengontrol(Aldi, 2014:16).
2.2.3. Kontrol Derivatif (Kd)
Keluaran pengontrol diferensial memiliki sifat seperti halnya suatu operasi derivatif. Perubahan yang mendadak pada masukan pengontrol akan mengakibatkan perubahan yang sangat besar dan cepat. Ketika masukannya tidak mengalami perubahan, keluaran pengontrol juga tidak mengalami perubahan, sedangkan apabila sinyal masukan berubah mendadak dan menaik (berbentuk fungsi step), keluaran menghasilkan sinyal berbentuk impuls. Jika sinyal masukan berubah naik secara
perlahan (fungsi ramp), keluarannya justru merupakan fungsi step yang besar magnitudenya sangat dipengaruhi oleh kecepatan naik dari fungsi ramp dan faktor konstanta Kd. Sinyal kontrol u yang dihasilkan oleh kontrol D dapat dinyatakan sebagai:
( ) (12)
Dari persamaan di atas, nampak bahwa sifat dari kontrol D ini dalam konteks “kecepatan” atau rate dari error. Dengan sifat ini ia dapat digunakan untuk memperbaiki respon transien dengan memprediksi error yang akan terjadi. Kontrol Derivative hanya berubah saat ada perubahan error sehingga saat error statis kontrol ini tidak akan bereaksi, hal ini pula yang menyebabkan kontroler Derivative tidak dapat dipakai sendiri Ciri-ciri pengontrol derivatif :
1. Pengontrol tidak dapat menghasilkan keluaran jika tidak ada perubahan pada masukannya (berupa perubahan sinyal kesalahan) 2. Jika sinyal kesalahan berubah terhadap waktu, maka keluaran yang
dihasilkan pengontrol tergantung pada nilai Kd dan laju perubahan sinyal kesalahan.
3. Pengontrol diferensial mempunyai suatu karakter untuk mendahului, sehingga pengontrol ini dapat menghasilkan koreksi yang signifikan sebelum pembangkit kesalahan menjadi sangat besar. Jadi pengontrol diferensial dapat mengantisipasi pembangkit kesalahan, memberikan aksi yang bersifat korektif dan cenderung meningkatkan stabilitas sistem.
4. Dengan meningkatkan nilai Kd, dapat meningkatkan stabilitas sistem dan mengurangi overshoot(Aldi, 2014:17).
2.3. Desain Kendali PID
Desain kendali PID bertujuan untuk menentukan nilai Kp, Ki, dan Kd yang akan digunakan dalam realisasi sistem kendali menggunakan pengendali PID. Ada beberapa cara yang digunakan untuk mendesain kendali PID ini. Cara tersebut adalah dengan menggunakan metode
Ziegler-Nichols tipe 1 dan Ziegler-Nichols tipe 2. Kedua metode tersebut menggunakan cara yang berbeda untuk mencari nilai Kp, Ki, dan Kd pada pengendali PID. Setelah menemukan nilai Kp, Ki, dan Kd menggunakan kedua metode tersebut, maka biasanya desainer akan melakukan manual tunning dengan cara mengubah nilai Kp, Ki, dan Kd tersebut agar mendapatkan respon sistem yang lebih baik dari hasil desain awal. Ketiga metode tersebut akan dijelaskan lebih lanjut pada pembahasan di bawah ini(Aldi, 2014:18).
2.3.1. Metode Ziegler-Nichols Tipe 1
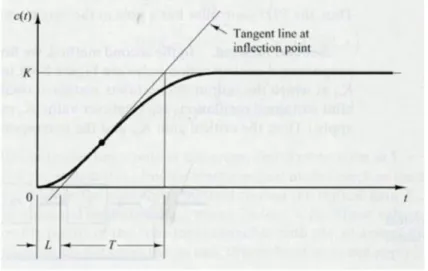
Desain pengendali PID menggunakan metode Ziegler-Nichols tipe 1 pada awalnya menggunakan sistem loop terbuka. Seperti ditunjukan pada Gambar 2.3. Respon sistem loop terbuka berupa gelombang step. Seperti ditunjukan pada Gambar 2.8.
Gambar 2. 8. Respon Sistem Loop Terbuka
Pencarian nilai Kp, Ki, dan Kd pada metode ini diawali dengan mencari nilai L dan T seperti pada Gambar 2.8. L adalah nilai dead time (time delay/lag) pada respon dari titik nol menuju waktu cut-off. Dan T adalah time constant. Nilai L dan T dalam satuan detik (sekon).
Penarikan garis diagonal pada respon loop terbuka adalah dengan menempelkannya pada bagian gelombang yang terlandai. Nilai L ditentukan dari perpotongan garis diagonal dengan sumbu x. Sedangkan
nilai T ditentukan dari perpotongan garis diagonal dengan garis perpanjangan steady state. Setelah menemukan nilai L dan T, selanjutnya dapat dicari nilai Kp, Ki, dan Kd berdasarkan penghitungan pada Tabel 2.2(Aldi, 2014:19).
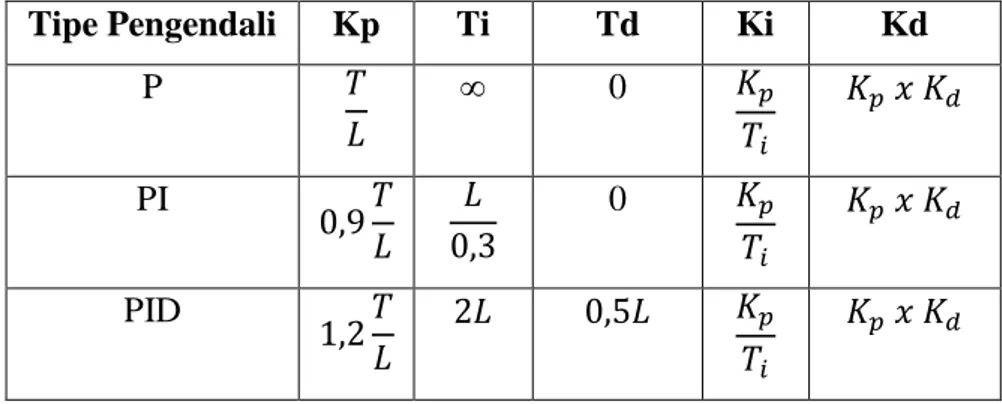
Tabel 2. 2. Penghitungan Kp, Ki, dan Kd Ziegler Nichols Tipe 1
Tipe Pengendali Kp Ti Td Ki Kd P ∞ 0 PI 0 PID
2.3.2. Metode Ziegler-Nichols Tipe 2
Desain pengendali PID menggunakan metode Ziegler-Nichols tipe 2 pada awalnya menggunakan sistem loop tertutup dengan feedback seperti ditunjukan pada Gambar 2.4. Pencarian diawali dengan mengatur nilai K (penguatan) hingga respon sistem osilasi. Respon sistem untuk desain menggunakan metode ini ditunjukan pada Gambar 2.9.
Gambar 2. 9. Respon Sistem Osilasi
Berdasarkan Gambar 2.9, pencarian nilai Kp, Ki, dan Kd menggunakan metode ini adalah dengan mencari nilai Kcr. Kcr adalah
nilai K (penguatan) saat respon sistem osilasi. Setelah didapatkan respon sistem yang berosilasi, selanjutnya adalah mencari nilai Pcr. Pcr adalah waktu yang dibutuhkan sistem untuk menempuh satu gelombang. Pcr dalam satuan waktu (sekon). Setelah menemukan nilai Kcr dan Pcr, selanjutnya dapat dicari nilai Kp, Ki, dan Kd berdasarkan penghitungan pada Tabel 2.3(Aldi, 2014:20).
Tabel 2. 3. Penghitungan Kp, Ki, dan Kd Ziegler Nichols Tipe 2
Tipe Pengendali Kp Ti Td Ki Kd P ∞ 0 PI 0 PID
2.3.3. Metode Cohen-Coen Open Loop Metoda Cohen Coon (Open Loop)
Berikut adalah tahapan Mendesain dengan CC adalah :
1. Plant diberi input step, lalu respon dibiarkan sampai mencapai steady-state.
2. Step input ditambah, lalu respon dibiarkan sampai mencapai steady-state. Sinyal perubahan inilah yang akan dipakai untuk mendesain kendali.
Parameter :
- Proses gain (
g
p) - Delay time Ԏd- Time constant (Ԏ)
3. Menentukan parameter PID (Kp, Ti, Td) berdasarkan perhitungan rumus yang tercantum pada tabel 2.
Tabel 2. 4: Parameter Perhitungan PID (Kp,Ti,Td)
2.3.4. Manual Tunning
Manual tunning adalah metode yang dilakukan dengan cara mengubah-ubah nilai Kp, Ki, dan Kd yang telah dihitung melalui pendesainan awal. Manual tunning digunakan untuk memperbaiki respon sistem agar menjadi lebih responsif. Pengubahan nilai Kp, Ki, dan Kd dilakukan dengan tetap memperhatikan parameter yang telah ditunjukan pada Tabel 2.1. Manual tunning biasanya dilakukan untuk menghilangkan overshoot, steady state error, dan settling time serta memperkecil nilai rise time(Aldi, 2014:21).
2.4. Perangkat Lunak (Software) MATLAB
MATLAB (matrix laboratory) adalah sebuah lingkungan komputasi numerikal dan bahasa pemrograman komputer generasi keempat. Dikembangkan oleh The MathWorks, MATLAB memungkinkan manipulasi matriks, pem-plot-an fungsi dan data, implementasi algoritma, pembuatan antarmuka pengguna, dan peng-antarmuka-an dengan program dalam bahasa lainnya. Meskipun hanya bernuansa numerik, sebuah kotak kakas (toolbox) yang menggunakan mesin simbolik MuPAD, memungkinkan akses terhadap kemampuan aljabar komputer. Sebuah paket tambahan, Simulink, menambahkan
simulasi grafis multiranah dan Desain Berdasar-Model untuk sistem terlekat dan dinamik.
Simulink MATLAB digunakan untuk membaca gelombang pada set poin dan keluaran sistem sebagai respon sistem kendali. Respon sistem ini kemudian akan diolah dalam pendesainan pengendali PID. Logo Simulink MATLAB dapat dilihat pada Gambar 2.10(Aldi, 2014:21).
Gambar 2. 10. Logo Simulink MATLAB
2.5. Modul Miktrokontroller Arduino Uno
Arduino Uno sebenarnya adalah salah satu kit mikrokontroller yang berbasis pada ATmega28. Modul ini sudah dilengkapi dengan berbagai hal yang dibutuhkan untuk mendukung mikrokontroler untuk bekerja, tinggal colokkan ke power suply atau sambungkan melalui kabel USB ke PCmu Arduino Uno ini sudah siap sedia. Arduino Uno ini memilki 14 pin digital input/output, 6 analog input, sebuah resonator keramik 16MHz, koneksi USB, colokan power input, ICSP header, dan sebuah tombol reset. Arduino Uno digunakan untuk membangun sebuah sistem kendali yang berdiri sendiri tanpa tergantung pada Personal Computer (PC) atau biasa disebut Stand Alone Control. Stand Alone Control dibangun agar sebuah sistem kendali dapat beroperasi dengan baik tanpa tergantung pada PC. Karena sebuah sistem kendali berjalan secara rutin sehingga haruslah dibuat sistem kendali yang dapat berdiri sendiri. Arduino Uno digunakan untuk membuat sebuah Stand Alone Control yang bersifat digital. Arduino Uno diprogram dengan script yang mirip
dengan bahasa C. Gambar dari modul Arduino Uno dapat dilihat pada Gambar 2.11(Aldi, 2014:6 ).
3.1 Desain PID Ziegler-Nichols Tipe 1
Liter(l)
Time(t)
Gambar 3. 1 Respon Sistem Open Loop
Respon sistem tersebut kemudian diolah dengan melakukan pemplotan untuk mencari nilai T dan L seperti ditunjukan oleh Gambar 3.1.
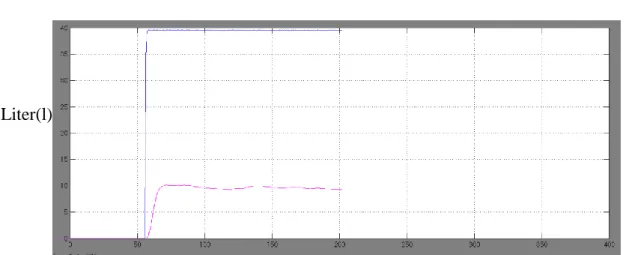
Liter(l)
Time(t)
Gambar 3. 2. Pemplotan untuk Mencari Nilai T dan L
Setelah mendapat nilai L, T, waktu gelombang pertama risetime, gelombang terakhir dan waktu asli yang didapat dari stopwatch. Hitung di program excel dengan rumus sebagai berikut :
Kp = 1,2 x (T / L), Ti = 2 x L,
Kd = Kp x Td DEBIT AIR PARAMETER L T Kp Ti Td Ki Kd REAL TIME 0.2064 0.5676 3.3 0.4128 0.1032 7.994186 0.34056 Time stopwatch 12.57 Time Matlab 146.2
Tabel 3. 1 Nilai Kp, Ki, dan Kd Ziegler Nichols Tipe 1
3.2 Desain PID Ziegler-Nichols Tipe 2 3.2.1 Kondisi Mulai Berosilasi
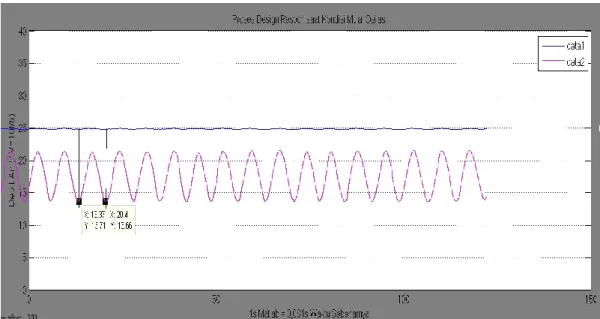
Gambar 3. 3. Hasil Respon Steady State saat Respon Kondisi Awal Osilasi
Setelah mendapatkan respon yang diinginkan dan melakukan desain, selanjutnya menghitung nilai Pcr, Kp, Ti, Td, Ki, Kd. Dan untuk Kcr didapat dari perhitungan ini :
Kcr = Nilai Pengukuran Keluaran PID / Pengukuran Keluaran di Set Point
= 9,94/0,578 = 17,197231 Inilah hasil perhitungan di Exel :
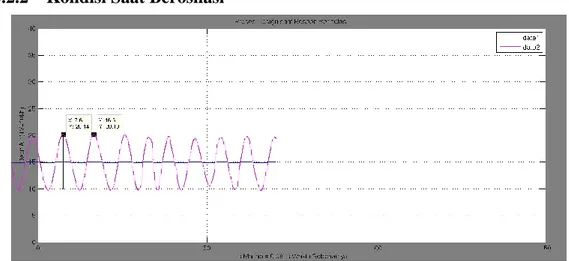
Gambar 3. 4Hasil Respon Steady State saat Respon Kondisi Osilasi Maksimal
Setelah mendapatkan respon yang diinginkan dan melakukan desain, selanjutnya menghitung nilai Pcr, Kp, Ti, Td, Ki, Kd. Dan untuk Kcr didapat dari perhitungan ini :
Kcr = Nilai Pengukuran Keluaran PID / Pengukuran Keluaran di Set Point
1s matlab=0,0854s real
Inilah hasil perhitungan di Exel :
Tabel 3. 4 Proses Desain dengan Metode Cohen Coon
g
p = Perubahan PV/Perubahan CO 11,67 – 7,607 / 4,3 = 0,94488372 Ԏd = 68,8 – 66,03= 0,236558Ԏ = 0,63*(11,67 – 7,607) = 2,55969
Jika diukur dari Y = 0 7,607 + 2,55969 = 10,16669 Maka nilai Ԏ = 72,4 – 68,8 = 3,6 (3,6 x waktu asli)
= 3,6 x 0,0854 = 0,030744
Lalu gunakan rumus untuk mencari parameter PID. Parameter PID yang didapat adalah sebagai berikut.
pada metode-metode sebelumnya mendesain hasil respon. Untuk sekarang menggunakan program yang dibuat di matlab, nilai PID-nya dimasukan ke dalam program, nilai PID yang digunakan berasal dari nilai PID yang dihasilkan dari desain kendali metode-metode sebelumnya. Flowchart dapat dilihat di gambar 3.7 dan program dapat dilihat di gambar 3.8-3.11.
Gambar 3. 6: Script menentukan pin output arduino, time sampling dan parameter PID (nilai terdapat pada praktikum sebelumnya)
Gambar 3. 7: Script menentukan Proses Value dan Perhitungan Error secara berulang menggunakan while
Gambar 3. 8: Script menentukan nilai VID agar tidak > dari 10, < dari 0 dan membulatkan nilai hasil keluaran dari PID
Gambar 3. 9 : Script membaca input hasil PID pada Arduino, menentukan Plot Respon dan Setpoint dan Script penutup pada Program
3.5 Desain PID Stand-Alone Arduino
Untuk desain PID dengan metode stand-alone arduino sedikit berbeda, jika pada metode-metode sebelumnya mendesain hasil respon. Untuk sekarang menggunakan program yang dibuat di arduino dan melihat respon melalui LCD. Nilai PID-nya dimasukan ke dalam program, nilai PID yang digunakan berasal dari nilai PID yang dihasilkan dari desain kendali metode-metode sebelumnya. Flowchart dapat dilihat di gambar 3.12 dan program dapat dilihat di gambar 3.8-3.11.
Gambar 3. 11 :Program Stand-Alone Arduino
4.1. Desain Kendali dengan Metode Ziegler-Nichols Tipe I
Data yang didapat, dihitung dengan menggunakan program excel.
DEBIT AIR
PARAMETER L T Kp Ti Td Ki Kd
REAL TIME 0.2064 0.5676 3.3 0.4128 0.1032 7.994186 0.34056
Time stopwatch 12.57
Time Matlab 146.2
Tabel 4. 1. Nilai Kp, Ki, dan Kd Ziegler Nichols Tipe 1
Hasil output dari plant terlihat pada scope Matlab, seperti pada gambar dibawah ini.
Gambar 4. 1 Gelombang ZN-1 pada scope
Keterangan : biru gelombang setpoint, ungu gelombang feedback debit air
Apabila pada gelombang setpoint dan feedback terdapat perbedaan besar, maka lakukan tahap manual tunning dan apabila gelombang rise time, steady-state dan overshootnya mendekati atau sama, maka tidak perlu dilakukan manual tunning.
4.2. Desain Kendali dengan Metode Ziegler-Nichols Tipe II
1. Untuk metode ini, digunakan 2 parameter perhitungan, yaitu pada saat mulai osilasi dan pada saat osilasi maksimal. Data yang didapat, dihitung dengan menggunakan program excel.
Tabel 4. 2. Nilai Kp, Ki, dan Kd Ziegler Nichols Tipe II
Hasil output dari plant terlihat pada scope Matlab, seperti pada gambar dibawah ini.
Gambar 4. 2 Gelombang ZN-2 pada scope untuk kondisim mulai osilasi
Gambar 4. 3 Respon Untuk kondisi Mulai Osilasi
Apabila pada gelombang setpoint dan feedback terdapat perbedaan besar, maka lakukan tahap manual tunning dan apabila gelombang rise time, steady-state dan overshootnya mendekati atau sama, maka tidak perlu dilakukan manual tunning.
2. Data PID untuk kondisi osilasi maksimal.
Kcr = Nilai Pengukuran Keluaran PID / Pengukuran Keluaran di Set Point 1s matlab=0,0854s real
Inilah hasil perhitungan di Exel :
Tabel 4. 3. Nilai Kp, Ki, dan Kd Ziegler Nichols Tipe II
Hasil output dari plant terlihat pada scope Matlab, seperti pada gambar dibawah ini.
Gambar 4. 4 Gelombang ZN-2 pada scope untuk kondisim osilasi maksimal
Gambar 4. 5 Respon Untuk kondisi Osilasi Maksimal
Pada saat point diubah-ubah, respon masih terlihat kurang baik, maka sebaiknya dilakukan manual tuning.
Dan didapat parameter baru yaitu Kp = 20 dan Ti = 0,45
Tabel 4. 4. Nilai Kp, Ki, dan Kd Ziegler Nichols Tipe II
.
Gambar 4. 6 Hasil Desain Manual Tunning saat Respon Osilasi Maksimal
4.3. Desain Kendali dengan Metode Cohen-Coen
Dengan menggunakan nilai-nilai PID(tabel 4.4) dari hasil desain sebelumnya, maka didapat respon seperti gambar 4.5.
Tabel 4. 5. Nilai Kp, Ki, dan Kd Cohen-Coen
Gambar 4. 7 Hasil Respon Akhir
4.4. Desain Kendali dengan Metode Arduino-Matlab Script
Program yang telah dibuat di script matlab akan menghasilkan respon seperti gambar 4.6
Gambar 4. 8 : Hasil gelombang output dari PLANT pada Matlab Kondisi setpoint normal (potensio tidak dirubah-rubah)
Gambar 4. 9 : Hasil gelombang output dari PLANT pada Matlab yang dirubah-rubah setpointnya
Amati gelombang tersebut, apabila delay, steady-state, overshoot pada gelombang time respon masih jauh dengan setpoint maka lakukan manual tunning dengan merubah nilai Kp, Ki dan Kd pada script program. Pada sistem ini, kami mengubah nilai Kd menjadi “0” agar frekuensi tidak terlalu besar, dan mengubah nilai Ti menjadi 0.3.
Gambar 4. 10 : Hasil gelombang output dari PLANT pada Matlab yang telah di manual tunning
4.5. Desain Kendali dengan Metode Stand-Alone Arduino
Dalam Metode Stand-Alone arduino, kita tidak menggunakan perangkat lain selain arduino, penggunaan matlab sudah tidak dibutuhkan. Sebagai gantinya, untuk melihat respon maka akan ditampilkan di LCD.
Gambar 4. 11 : Hasil Setpoint dan Feedback Sistem Kendali Debit Air pada LCD
Saat sistem kendali bekerja dengan baik, sehingga nilai feedback mengikuti nilai setpoint. Maka tahap selanjutnya dapat melepaskan arduino dari laptop dan menghubungkannya dengan Power Bank, jika dengan Power Bank plant tetap bekerja dengan baik maka dengan begitu sistem kendali debit air dapat dikendalikan hanya dengan menggunakan arduino atau stand alone.
Hasil data yang didapat pada serial monitor pada aplikasi arduino :
Hasil dari nilai diatas dikalikan 10, sesuai dengan rumus output dari Sistem Kendali Debit Air yaitu : 1V/10l x h. Sehingga didapat 2,38 x 10 = 23,8 . Namun pada data yang ke-2 terdapat osilasi sehingga tidak mendapatkan nilai yang permanen sehingga setpoint dan feedback-nya berubah-rubah dan respon pada feedback sangat lambat sehingga pada saat setpoint dirubah, proses penyesuaian nilai feedback agar mendekati setpoint sangat lambat. Inilah hasil keluaran di LCD dapat dilihat pada gambar 5.2.
BAB 5
KESIMPULAN DAN SARAN
5.1. Kesimpulan
Dari data hasil percobaan dapat disimpulkan beberapa hal sebagai berikut:
1. Sistem kendali debit air sudah dibuktikan dapat menggunakan metode desain kendali dari Ziegler-Nichols I dan II, dan Cohen-Coen.
2. Desain kendali PID Ziegler-Nichols tipe 1 cocok digunakan pada sistem kendali debit air, karena nilai-nilai PID yang dihasilkan menghasilkan respon yang baik dan tidak membutuhkan manual tunning.
3. Desain kendali PID Ziegler-Nichols tipe II oun cocok digunakan untuk sistem kendali debit air. Tetapi dalam percobaan ini digunakan 2 parameter desain, yaitu nilai PID pada saat kondisi mulai osilasi dan pada saat osilasi maksimal. Nilai PID yang dihasilkan dari kondisi mulai osilasi, menghasilkan respon yang sangat baik dan tidak perlu dilakukan manual tunning. Tetapi, untuk kondisi osilasi maksimal, nilai PID yang dihasilkan menghasilkan respon yang kurang baik sehingga perlu dilakukan manua tunning. Maka untuk Ziegler-Nichols tipe II harus menggunakan kondisi mulai osilasi untuk menghasilkan nilai PID yang baik.
4. Desain kendali PID dengan metode Cohen-Coen pun cocok digunakan untuk plant debit air, karena respon yang dihasilkan sangat baik dan tidak membutuhkan manual tunning.
5.2. Saran
1. Perlu dilakukan perbaikan dan perawatan pada pengendali PID agar pengaplikasian nilai Kp, Ki, dan Kd bisa lebih akurat.
2. Dalam proses desain, harus lebih teliti agar dapat menghasilkan nilai PID yang lebih akurat.
3. Selalu memeriksa setiap modul dan kabel-kabel untuk kelancaran praktikum.
[1]. Aldi, D.“ LAPORAN AKHIR PRAKTIKUM SISTEM KENDALI TEMPERATUR DENGAN PENGENDALI PID”, Laporan Akhir, Politeknik Negeri Bandung, 2014.
[2]. Edwar, Y. "PENERAPAN KENDALI CERDAS PADA SISTEM
TANGKI AIR DENGAN LOGIKA FUZZY", Jurnal Himpunan Fisika Indonesia, LIPI, 2009.
[3] Ahmad, S. Iwan, S. dan Sumardi "Aplikasi Kendali PID menggunakan Skema Gain Scheduling untuk Pengendalian Suhu Cairan pada Plant Electric Water Heater", Research Article, Universitas Diponegoro Semarang, 2010. [4] Ihdina, N. Hendro, P. Budi, K. "PEMODELAN SISTEM LEVEL AIR HEAD TANK MENGGUNAKAN PENGENDALI PID PADA PEMBANGKIT LISTRIK TENAGA MINI HIDRO MERASAP."Universitas Tanjungpura Pontianak.
[5] “Matlab R2013a”,
http://www.behdadsoft.com/Matlab-R2013a.html. Diakses 6 Juli 2015.