PENDAHULUAN
I.1. Latar Belakang
Bangunan sejarah mempunyai nilai penting di suatu negara karena dari bangunan bersejarah tersebut dapat diketahui kisah yang terkait dari bangunan tersbut. Pemanfaatan bangunan bersejarah perlu dimaksimalkan untuk menjaga dan melestarikan bangunan tersebut agar tidak hilang ditelan waktu sehingga nantinya dapat memberikan informasi kepada generasi muda mengenai kejadian-kejadian bersejarah yang telah terjadi. Salah satunya Jakarta yang mempunyai Monumen Nasional (Monas) yang mempunyai arti penting di saat kemerdekaan Republik Indonesia. Ada beberapa hal yang dilakukan sebelum memanfaatkan kembali bangunan bersejarah tersebut, antara lain Preservasi, Rehabilitasi, Konservasi, Replikasi, Relokasi, Rekonstruksi dan Revitalisasi. Dari tujuh kegiatan dalam pemanfaatan bangunan bersejarah, Rekonstruksi dan Konservasi memerlukan tingkat ketelitian dan kedetilan yang tinggi.
Rekonstruksi yaitu suatu kegiatan penyusunan kembali struktur bangunan yang rusak/runtuh, yang pada umumnya bahan-bahan bangunan yang asli sudah banyak yang hilang. Konservasi yaitu memelihara dan melindungi tempat-tempat yang indah dan berharga, agar tidak hancur atau berubah sampai batas-batas yang wajar. Rekonstruksi dan konservasi biasanya mengacu pada dokumentasi bangunan tersebut sebelum terjadi perubahan. Pendokumentasian tersebut tidak hanya terbatas untuk mengetahui dimensi geometri bangunan, namun juga terkait dengan seberapa besar perubahan dimensi geometri bangunan yang terjadi dalam kurun waktu tertentu (Didik, 2011). Oleh karena itu perlu untuk dilakukan pembuatan model 3D dengan menggunakan teknologi yang mudah dan membutuhkan waktu cepat dalam melakukan pengukuran.
Seiring dengan perkembangan teknologi yang begitu cepat, saat ini banyak perusahaan pembuat alat ukur yang bergerak di bidang survey untuk membuat keringkasan dan kemudahan dalam pengumpulan dan pengambilan data pengukuran, salah satu alat yang dibuat oleh Leica, yaitu Multistation. Multistation adalah alat ukur berupa Total Station yang mempunyai banyak fitur dalam penggunaannya, salah satunya bisa digunakan untuk melakukan scanning dalam melakukan pemodelan tangki, stockpile, bangunan, dll.
Penggunaan Multistation dapat digunakan untuk pemodelan 3D dari data scanning yang berupa point cloud.
Metode scanning mempunyai beberapa keunggulan antara lain dalam satu kali berdiri alat dapat merekam ribuan hingga jutaan titik sehingga mempersingkat waktu dalam pengukuran yang kemudian data dari hasil scanning dapat di bentuk menjadi model 3D. Pemodelan bangunan dalam bentuk 3D merupakan suatu cara yang tepat dengan didukungnya perkembangan teknologi yang semakin canggih seperti sekarang ini karena model yang ditampilkan adalah hasil real dari bangunan dalam bentuk 3D. Pengukuran akan lebih aman karena tidak harus dilakukan dengan menyentuh objek yang bersangkutan, hal ini sangat membantu dalam pengukuran Monas mengingat tingginya bangunan tersebut.
Berdasarkan dari kebutuhan serta uraian yang telah disebutkan mengenai alat
Multistation, fitur scanning Multistation dapat diaplikasikan untuk pekerjaan ini.
I.2. Lingkup Kegiatan Ruang lingkup dari kegiatan ini yaitu :
1. Lokasi kegiatan terletak di lapangan Medan Merdeka, Jakarta Pusat dan berupa bangunan Monumen Nasional (Monas).
2. Pengukuran dilakukan dengan menggunakan alat Leica Nova MS50 Multistation 3. Pengolahan data dilakukan dengan menggunakan software Leica Infinity, dan meshlab 4. Kontrol kualitas data pada pemodelan 3D Monas dilakukan dengan cara visual bentuk
geometri dari dokumentasi foto Monas.
I.3. Tujuan
Kegiatan ini bertujuan untuk membuat model 3D Monumen Nasional (Monas), berdasarkan data hasil pengukuran menggunakan Multistation Leica Nova MS50.
I.4. Manfaat
Manfaat dari proyek ini adalah untuk membuat model 3D suatu bangunan bersejarah yang nantinya akan memudahkan dalam proses rekonstruksi suatu bangunan bersejarah.
I.5. Landasan Teori I.5.1. Multistation
Multistation merupakan salah satu alat dibidang survey yang diproduksi berdasarkan
didalam pengoperasian alat. Sehingga bisa dilakukan pengukuran dengan menggunakan beberapa metode baik menggunakan total station ataupun menggunakan scanner, tergantung dari kebutuhan dalam melakukan pengukuran. Banyaknya titik objek yang dapat direkam (scanning) pada satu kali berdiri alat mencapai ribuan, bahkan jutaan titik, sehingga data hasil perekam dikenal dengan nama Point Cloud (titik awan). Prinsip menggunakan scanner pada
Multistation sama seperti prinsip laser scanner yaitu, apa yang dilihat maka itu yang
ditangkap. Banyaknya titik yang direkam dapat diatur dengan mengatur jarak spasi titik objek yang akan di rekam. Kecanggihan teknologi dalam Multistation juga sudah dilengkapi dengan kemampuan robotik pada alat dan laser yang sudah diterapkan pada alat, sehingga dalam penggunaanya bisa dilakukan pengukuran tanpa prisma atau reflectorless dan bisa dilakukan pengukuran ke prisma tanpa mengarahkan teropong alat ke prisma karena bisa dilakukan secara robotik.
Secara umum spesifikasi Multistation ialah jarak pengukuran menggunakan prisma 1,5 m > 10000 m, jarak pengukuran tanpa menggunakan prisma 1,5 m – 2000 m, akurasi pengukuran menggunakan prisma 1 mm + 1,5 ppm x D, akurasi pengukuran tanpa menggunakan prisma 2 mm + 2 ppm x D, kecepatan scanning 1000 titik pada jarak 300 m, jarak datar maksimum scanning sampai 1000 m, presisi scanning < 1 mm @ 50 m. Spesifikasi alat lebih rincinya dilampirkan pada lampiran A.
Multistation bisa digunakan untuk melakukan monitoring jembatan, kilang minyak
atau pun untuk tambang. Dan bisa juga di gunakan untuk menghitung volume cut and fill, sangat jarang untuk dilakukan pemodelan suatu bangunan bersejarah karena memang fiturnya merupakan total station bukan laser scanner (anonim 2013). Pada alat Multistation bisa juga dijadikan smartstation yaitu, menambahkan base GPS yang dipasang pada headstation, namun masih jarang digunakan di Indonesia karena tergantung dari pada kebutuhan penggunaan. Beberapa penjelasan mengenai tampilan dari Multistation seperti pada gambar 1.1
Gambar I.1 Leica nova ms50 (multistation) (Anonim, 2013)
Keterangan gambar : 1. Handgrip
2. Collimator. Digunakan sebagai pendekatan dalam membidik target 3. Lensa obyektif
4. Sekrup penggerak halus vertikal 5. Keyboard
6. Layar
7. Tribach levelling screw
8. Sekrup penggerak halus horisontal 9. Sekrup fokus
1.5.1.1. Pengukuran menggunakan Multistation. Multistation merupakan revolusi dari penggunaan alat ukur di dalam dunia survey pemetaan. Pada dasarnya Multistation merupakan alat ukur total station dari konsep pengukurannya, namun pada alat ini telah dilengakapi dengan fitur yang lebih canggih. Alat ini telah dilengkapi dengan sistem robotik dan bisa juga digunakan tanpa menggunakan prisma ataupun menggunakan prisma,
Multistation juga telah dilengkapi sengan sistem scanning sehingga memudahkan dalam
penggunaan alat saat melakukan pengukuran.
Konsep dasar pengukuran menggunakan Multistation sama seperti konsep dasar pengukuran menggunakan total station, yaitu harus menentukan backsight dan foresight
2 3 8 5 1 6 4 7 9
sebelum melakukan pengukuran, yang membedakan hanya fitur yang tersedia pada alat
Multistation tersebut. Fitur yang tersedia pada alat Multistation yaitu, penggunaan pada totalstation bisa menggunakan reflektor ataupun reflektorless tergantung dari kebutuhan di
dalam pengambilan data (Anonim, 2013).
Terdapat tiga komponen dalam alat multistation, yaitu alat pengukur sudut, alat pengukur jarak, scanning. Parameter yang dapat diukur menggunakan alat ini adalah sudut horizontal, sudut vertikal, jarak miring. Koordinat titik didapatkan dengan menggunakan sudut dan jarak hasil ukuran. Data mentah yang diperoleh dari pengukuran dengan
Multistation adalah sudut dan jarak. Gambar I.2 menunjukkan prinsip penentuan koordinat
plenimetris dengan menggunakan Multistation.
U
α d12 2 (X2,Y2)
1 (X1,Y1)
Gambar I.2 Penentuan koordinat planimetris
Keterangan gambar :
X1,Y1 : Koordinat titik 1 yang telah diketahui posisi Multistation α12 : Azimuth 1-2
d12 : Jarak 1-2
X2,Y2 : Koordinat titik 2 yang akan dicari
Dari gambar diatas, diperoleh persamaan untuk mencari X2,Y2 seperti yang ditunjukkan dalam persamaan I.1 dan I.2 sebagai berikut:
X2 = d12 Cos (α12) + X1 ... (I.1) Y2 = d12 Sin (α12) + Y1 ... (I.2)
Prinsip penentuan tinggi dalam pengukuran Multistation sama seperti dengan total
station, yaitu menggunakan metode trigonometris (Anonim, 2013). Prinsip penentuan tinggi
menggunakan total station adalah dengan mengukur sudut miring atau sudut vertikalnya dengan jarak yang diketahui seperti pada gambar I.3 (Basuki, 2006).
S V tr h B ∆hAB Ta A D
Gambar I.3. Penentuan tinggi (Basuki, 2006)
Dari Persamaan I.1, I.2, dan I.3 sebagai berikut :
∆hAB = ta + V – tr ... (I.3) V = S sin h – D tan h ... (I.4) HB = HA + ∆hAB – HA + ta + V – tr ... (I.5)
Keseluruhan persamaan di atas tidak artinya ketika alat Multistation tidak di setting dengan benar atau dalam hal ini mengalami kesalahan pada proses orientasi. Orientasi bertujuan sebagai referensi dalam penentuan koordinat detil selanjutnya.
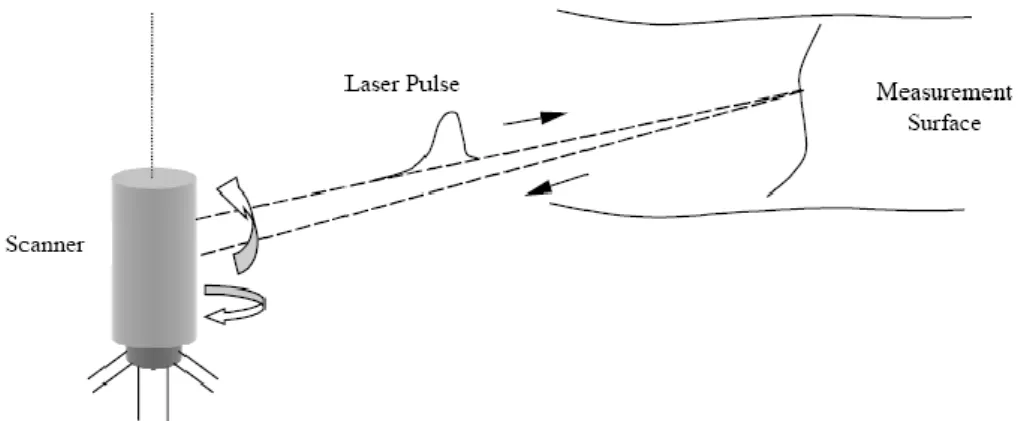
1.5.1.2. Sistem Perekaman data. Prinsip dasar perekaman data scanning pada Multistation adalah sama seperti perekaman data menggunakan laser scanner, yaitu pulsa ditransmisikan ke objek yang kemudian dikembalikan ke sistem penerima yang memancarkan gelombang sinar laser hingga mengenai objek yang akan diukur kemudian objek tersebut memantulkan kembali gelombang sinar tersebut ke sistem penerima (Kholiq, 2006).
Selama proses pancaran gelombang akan diperoleh perbedaan lama waktu saat gelombang laser dipancarkan ke objek dan waktu saat gelombang dipantulkan kembali ke
alat. Perbedaan waktu tersebut yang akan digunakan dalam menentukan jarak ukuran dari
Multistation ke objek (Lichti, 2000).
Adapun prinsip perekaman data jarak dan arah jalannya sinar laser dapat dijelaskan pada gambar I.4 berikut :
Gambar I.4. Perekaman data jarak ( Lichti, 2000 )
Persamaan untuk menentukan jarak ukuran dari scan head / telescope camera ke objek pada Multistation sebagai berikut :
Distance ( R ) = ( C x △T )/2 …...…………...………(1.6) Dimana :
R : jarak scanner dari titik objek
C : kecepatan gelombang sinar laser ( 3 x 108 m/s) △T : jumlah waktu pergi dan pulang
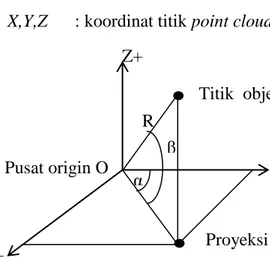
Data yang direkam berupa data sudut horizontal (α), sudut vertikal (β), dan jarak antara pusat koordinat scanner dengan obyek yang direkam (R) seperti pada persamaan 1.4. dan Seperti dapat dilihat pada Gambar 1.5 prinsip perekaman data scanner untuk bidang X dan Y dijadikan sebagai reference plane dalam koordinat scan. Laser bergerak dari atas ke bawah dan ke samping kanan sesuai dengan arah perputaran jarum jam (Wicaksono, 2005).
Hasil pengukuran koordinat 3D obyek yang direkam dapat ditentukan dengan persamaan berikut :
X= R . cos β.Sin α....………...……….….……(1.7) Y= R . cos β. cos α …….………..……….…...…....(1.8)
Z= R . sin β……….……….……….….…...(1.9)
R : jarak dari scanner ke titik objek α : sudut horizontal titik objek β : sudut vertikal objek
X,Y,Z : koordinat titik point cloud
Gambar I.5. Prinsip perekaman data dengan scanner (Soeta’at, 2005)
1.5.1.3. Sistem registrasi data. Registrasi dari tiap scanworld pada Multistation ialah auto
register yaitu registrasi berdasarkan dari titik stasiun berdiri alat yang mengacu pada backsight. Koreksi geometric dan atmospheric pada point clud dapat diganti selama
pengukuran dari prosedur scanning. Hasil dari pengukuran dapat langsung ditampilkan pada layar alat Multistation sehingga dapat diketahui point cloud dari bentuk obyek yang telah diukur dan memudahkan pengukuran ulang apabila terjadi kesalahan pada hasil scanning. Kesalahan hasil scanning yang terjadi pada Multistation adalah tidak teregestrasinya dari tiap
scanworld karena tidak tepatnya pengukuran backsight saat melakukan scanning (Anonim,
2013).
I.5.2. Scanner
Scanner adalah suatu sistem yang memanfaatkan aplikasi sinar laser di mana digunakan untuk penyiaman suatu kenampakan objek dengan memanfaatkan sensor aktif. Sensor aktif ini memberikan suatu keuntungan yaitu tidak adanya ketergantungan terhadap kondisi pencahayaan yang mungkin berbeda secara signifikan misal daerah bervegetasi. Hasil dari peyiaman ini akan memperoleh kumpulan titik-titik 3D (X, Y dan Z) atau point cloud dari objek tersebut secara cepat dan akurat dalam jumlah titik penyiaman ( point cloud ) yang banyak dan real time (Reddington, 2005).
Titik objek Proyeksi objek bidang XY Pusat origin O Y+ X+ α β R Z+
1.5.3. Pemodelan 3D
Model tiga dimensi adalah sekumpulan titik-titik tiga dimensi, garis-garis, kurva, dan
surface yang dapat digunakan untuk menyajikan kembali obyek atau scene. Sebuah model
tiga dimensi akan dapat dibuat dari registrasi beberapa scan world yang bertampalan yaitu sekumpulan tiga dimensi (x,y,z) yang dapat merepresentasikan suatu obyek.
Hasil dari proses regitrasi adalah pemodelan tiga dimensi dalam bentuk point cloud. Namun pembentukan model tiga dimensi dari tiap metode registrasi tidak akan sama. Hal itu dipengaruhi titik konstrain (garis-garis seasal) yang digunakan untuk penggabungan frame
(scan world) sehingga menjadi pemodelan tiga dimensi.
Ada beberapa metode yang digunakan untuk pemodelan 3D. Ada jenis metode
pemodelan obyek yang disesuaikan dengan kebutuhannya seperti dengan nurbs dan poligon ataupun subdivision.
1.5.3.1. Modelling Polygon. Merupakan bentuk segitiga dan segiempat yang menentukan area dari permukaan sebuah karakter. Setiap poligon menentukan sebuah bidang datar dengan meletakkan sebuah jajaran poligon sehingga kita bisa menciptakan bentuk-bentuk permukaan. Untuk mendapatkan permukaan yang halus, dibutuhkan banyak bidang poligon. Bila hanya menggunakan sedikit poligon, maka obyek yang didapat akan terbagi sejumlah pecahan poligon. Ilustrasi pembentukan model menggunakan metode polygon seperti pada gambar I.6 berikut.
Gambar I.6. Ilustrasi modelling metode polygon (Amy, 2013)
1.5.3.2. Modelling NURBS (Non-Uniform Rational Bezier Spline). Merupakan metode paling populer untuk membangun sebuah model organik. Kurva pada nurbs dapat dibentuk dengan
hanya tiga titik saja. Dibandingkan dengan kurva poligon yang membutuhkan banyak titik (vertex) metode ini lebih memudahkan untuk dikontrol. Satu titik CV (Control vertex) dapat mengendalikan satu area untuk proses tekstur (Purnawan, 2013). Sebuah permukaan NURBS dibuat dengan menyebarkan permukaan tiga dimensi di seluruh mesh kurva NURBS. Kurva sendiri melibatkan perhitungan matematika yang kompleks. Sebagai modeler, sangat diperlukan memahami beberapa konsep ketika bekerja dengan NURBS, tetapi perangkat lunak menangani sebagian besar proses matematika dengan canggih sehingga Anda dapat berkonsentrasi pada proses modeling. Pada awal sejarah komputer grafis 3D, NURBS digunakan untuk membuat permukaan organik bahkan karakter (Amy, 2013). Ilustrasi dari pemodelan menggunakan metode NURBS seperti pada gambar I.7 berikut.
Gambar I.7. Ilustrasi modelling NURBS (Amy, 2013)
1.5.3.3. Subdivision Surface. Pemodelan dengan menggunakan Subdivisional hampir serupa dengan pemodelan polygon karena dibuat dari kumpulan titik – titik, , edge, dan polygon (Amy, 2013). Namun, juga memiliki kelebihan dari pemodelan permukaan NURBS. Sehingga termasuk dalam kategori tersendiri. Ilustrasi modelling subdivision surface seperti pada gambar I.8 berikut.
Gambar I.8. Ilustrasi modelling subdivision surface (Amy, 2013)
Tahap di atas merupakan urutan yang standar dalam membentuk sebuah obyek untuk pemodelan, dalam hal ini texturing sebenarnya bisa dikerjakan overlap dengan modelling, tergantung dari tingkat kebutuhan. Rendering adalah proses akhir dari keseluruhan proses pemodelan ataupun animasi komputer. Dalam rendering, semua data-data yang sudah dimasukkan dalam proses modelling, animasi, texturing, pencahayaan dengan parameter tertentu akan diterjemahkan dalam sebuah bentuk output. Proses texturing ini untuk menentukan karakterisik sebuah materi obyek dari segi tekstur. Untuk materi sebuah obyek bisa digunakan aplikasi properti tertentu seperti reflectivity, transparency, dan refraction.
Texture kemudian bisa digunakan untuk membuat berbagai variasi warna pattern, tingkat
kehalusan/kekasaran sebuah lapisan obyek secara lebih detail. I.5.4. Resampling point
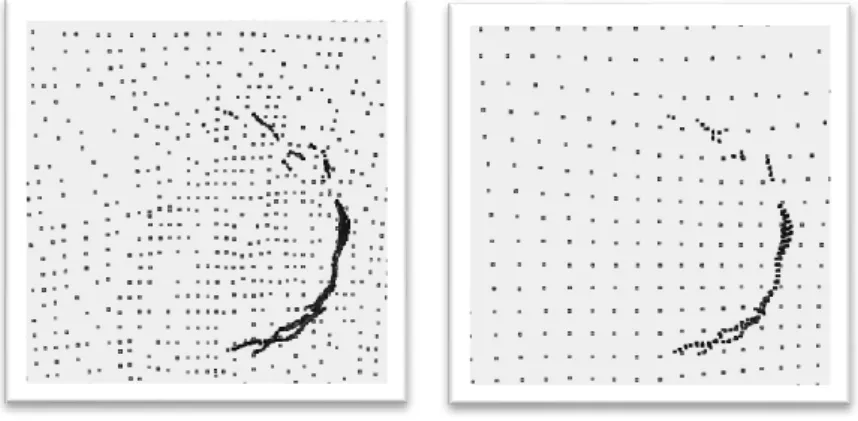
Resampling point adalah suatu proses untuk merenggangkan kerapatan point, yaitu
membuat point rapat menjadi point agak renggang. Bidang tinggi setiap point dilakukan sampling secara seragam untuk memfasilitasi pengolahan data titik 3D. Secara khusus, grid yang seragam ditarik di atas bidang dasar dan kemudian nilai tinggi yang baru dievaluasi pada setiap titik grid. Gambar. I.6 (a) menunjukkan jumlah point cloud yang akan dilakukan
resampling dan (b) menggambarkan setelah proses resampling. Struktur teratur grid yang
seragam akan memfasilitasi proses spektral bidang tinggi. Antara jumlah data dan akurasi geometri dapat di kontrol dengan mengubah resolusi sampling (Sim dan Lee, 2005).
(a) (b)
I.5.5. Leica Infinity
Merupakan software yang diproduksi oleh Leica Geosystems untuk memenuhi kebutuhan dalam dunia pemetaan dan bisa digunakan untuk mengimport data hasil ukuran dari Leica Nova Ms50 dan di export menjadi .pts. Yang nantinya akan dilakukan modelling untuk pekerjaan selanjutnya, ataupun hanya untuk melakukan modelling point cloud bisa dilakukan dengan menggunakan Leica Infinity.
1.5.6. Meshlab Software
Meshlab merupakan software opensource yang bisa digunakan oleh semua kalangan
masyarakat tanpa membeli sofware tersebut. Meshlab merupakan software yang digunakan untuk proses modelling 3D dan editing unstructured 3D triangular, yaitu dimana hasil dari
scanning bisa dibuat menjadi model 3D dengan menggabungkan titik-titik dari pointcloud
menjadi jaring-jaring segitiga dan kemudian dari hasil jaring-jaring segitiga tersebut menjadi sebuah bentuk obyek (Anonim, 2006).
Di dalam penggunaan software meshlab ada beberapa istilah yang harus diketahui dan di pahami terlbih dahulu, diantaranya adalah :
1. Vertex
Vertex, adalah komponen dasar pembentuk objek, berupa titik sudut dalam ruang 3D.
Sebuah vertex adalah sebuah titik koordinat dari sebuah polygon. Dalam memodifikasi sebuah objek dapat juga dilakukan dengan cara memodifikasi posisi vertex.
2. Edge
Edge, adalah garis yang menghubungkan vertex yang satu dengan yang lain.
Rangkaian garis-garis penghubung edge ini membentuk sebuah polygon tertutup. Sama seperti vertex, dapat juga dilakukan dengan memodifikasi garis edge guna membentuk objek.
3. Face
Face, adalah elemen-elemen yang lebih kecil berbentuk bidang segitiga. Gabungan
face face inilah yang membentuk sebuah polygon. Sebuah face sendiri terdiri dari vertex dan edge.
Mesh, adalah kumpulan dari jumlah vertex yang mempunyai koordinat 3D dan akan
terhubung menjadi sebuah bentuk obyek dari vertex. 5. Compute normal of point set
Compute normal of point set, adalah suatu kegiatan pemodelan yang bertujuan untuk
menghitung titik mesh tanpa melakukan eksploitasi dan menghubungkan jaringan segitiga dari point yang digunakan untuk dataset.
6. Surface reconstruction poisson
Surface reconstruction poisson, adalah suatu proses rekonstruksi ke bentuk
permukaan 3D dari himpunan titik-titik sampel yang akan dikoreksi menuju permukaan yang lebih halus karena ada data yang terdapat noise. Dan semua titik-titik akan direkonstruksi dalam sekali proses, tanpa harus mengurutkan secara parsial.
1.5.7. Kontrol kualitas data
Kontrol kualitas adalah aktivitas pengendalian proses untuk mengukur ciri-ciri kualitas produk, membandingkannya dengan spesifikasi atau persyaratan, dan mengambil tindakan yang sesuai apabila ada perbedaan antara penampilan yang sebenarnya dan standarnya (Purnomo, 2004). Aktivitas pengendalian kualitas pada umumnya meliputi kegiatan-kegiatan seperti berikut ini (Purnomo, 2004):
1. Pengamatan terhadap performansi bentuk.
Yaitu membandingkan dua buah obyek atau bentuk untuk mengetahui kelemahan dan kelebihan dari masing-masing obyek atau bentuk tersebut
2. Membandingkan performansi yang ditampilkan dengan standar yang berlaku.
Yaitu membandingkan dengan memberikan standar atau dasar terhadap salah satu bentuk atau obyek yang sudah dipatenkan dan dijadikan sebagai pembanding dengan bentuk lainnya.
Kontrol kualitas juga dengan dilakukannya pengukuran hasil pemodelan dan akan dibandingkan dengan data sebenarnya mengacu ukuran Monas pada publikasi Supriyadi. (2004) karena publikasi tersebut memberikan informasi dari ukuran Monas yang sudah dipublikasikan secara umum berdasarkan data ukuran monas sebenarnya yang menyatakan bahwa “terdapat beberapa bagian Monas yang mempunyai ukuran diantaranya adalah bagian pelataran bawah Monas mempunyai luas ukuran 45m x 45m dengan tinggi 17m dan tinggi
museum sebesar 8m. Bagian tiang Monas mempunyai ukuran 115m, sedangkan luas dari pelataran tugu Monas mempunyai ukuran sebesar 11m x 11m. Tinggi Monas secara kesuluruhan sebesar 132m”.