1 BAB 1
PENDAHULUAN I.I. Latar Belakang
Laut memiliki peran penting dalam kehidupan manusia. Menurut Stewart (2008), laut paling tidak memiliki tiga peran utama bagi manusia. Pertama, manusia mengambil banyak bahan makanan dari laut. Kedua, laut juga dimanfaatkan sebagai sarana transportasi, rekreasi, serta sumber energi yang terbarukan, sehingga banyak kegiatan-kegiatan konstruksi yang dilakukan di laut. Ketiga, laut mempengaruhi kondisi iklim dan atmosfer. Laut mempengaruhi iklim regional, banjir, sampai perkembangan badai.
Sebagai negara maritim, Indonesia seharusnya memiliki banyak keuntungan dari luasnya wilayah laut yang dimiliki. Namun saat ini sumber daya laut yang melimpah itu belum banyak tergali potensinya. Salah satu faktor penyebabnya adalah kurangnya informasi tentang laut itu sendiri, terutama informasi geospasial. Dengan informasi yang memadai dapat dilakukan pembangunan yang lebih optimal, misalnya kegiatan konstruksi di laut, serta pengambilan cadangan minyak di bawah permukaan laut. Pemetaan laut, khususnya pemetaan bathimetri merupakan keperluan mendasar dalam rangka penyediaan informasi spasial untuk kegiatan, perencanaan, dan pengambilan keputusan yang berkaitan dengan informasi di bidang kelautan (Soeprapto, 2001)
Kegiatan Survei bathimetri dilakukan dengan berbagai peralatan dan metode. Kedalaman laut telah diukur secara sistematis selama seabad ini (Hall, 2006). Pada periode tersebut, metode dan peralatan yang digunakan telah berubah secara drastis, mulai dari pengukuran single beam sampai multibeam echosounder (MBES) yang menghasilkan ratusan titik kedalaman pada waktu yang singkat.
Dewasa ini alat yang umum dipakai pada pemetaan bathimetri adalah MBES, karena kemampuannya dalam menghasilkan banyak titik kedalaman dalam sekali pengukuran. Ferreira (2013) menjelaskan metode pengolahan data MBES, dalam penyajian data bathimetri, baik dalam bentuk peta topografi maupun pembentukan garis kontur, mutlak dibutuhkan proses gridding. Gridding adalah salah satu pendekatan dalam pembentukan model permukaan digital (Li, Zhu, dan Gold, 2005).
Pendekatan lainnya adalah dengan berbasis titik, segitiga, dan hybrid. Pendekatan yang paling umum digunakan adalah dengan segitiga dan grid.
Pendekatan grid lebih populer digunakan karena banyak prosedur perhitungan pada ilmu kebumian membutuhkan data dengan pola geometris yang teratur, termasuk analisis Fourier dan berbagai algoritma penggambaran peta (Smith dan Wessel, 1990). Pembuatan grid pada data bathimetri selain berguna untuk memfasilitasi berbagai perhitungan, juga dibutuhkan karena kebanyakan alat untuk penyajian data seperti monitor dan printer menggunakan prinsip grid. Pembuatan hill shading (Ware, 1989) dan penurunan data topografi seperti perhitungan slope (Zhou dan Liub, 2004) juga memanfaatkan data grid.
Tetapi kenyataannya banyak bidang pengukuran bidang geosaintis yang dilakukan secara tidak teratur pada bidang 2D karena beberapa halangan. Seperti keterjangkauan, biaya, dan waktu survei, sehingga distribusi pengukuran tersebar pada area sepanjang garis survei atau pada area tertentu. (Hell dan Jakobson, 2011). Metode rekonstruksi data pengukuran yang tidak teratur menjadi bentuk Cartesian grid inilah yang disebut dengan proses gridding (Sedarat dan Nishimura, 2000).
Salah satu contoh data MBES adalah data hasil pengukuran dalam rangka investigasi pencarian kapal karam di perairan Selat Sunda. Survei tersebut dilakukan oleh , Kapal Baruna Jaya IV milik Balai Teknologi Survei Kelautan – BPPT pada tahun 2012. Data ini telah diolah menggunakan software MB-System dan penyajiannya menggunakan Generic Mapping Tool dan menghasilkan titik-titik kedalaman terkoreksi dan memiliki kualitas yang baik (Afifuddin dan Prayogo, 2015). Hasil pengolahan data MBES berupa titik-titik kedalaman yang menggambarkan keadaan dasar laut. Visualisasi data MBES dihasilkan dengan software Generic Mapping Tool (GMT).
GMT adalah paket software yang digunakan untuk membuat atau memanipulasi visualisasi atau gambar, umumnya adalah data-data kebumian (Wessel dkk, 2014). Paket software GMT digunakan oleh software MB-System untuk visualisasi data MBES. Pengolahan data bathimetri menggunakan kedua paket software ini telah umum digunakan pada komunitas ilmiah karena sifatnya yang open source, gratis, serta menyediakan keleluasaan dalam pengolahan serta penyajian data.
Untuk menyajikan model permukaan digital, terdapat beberapa metode gridding. GMT menyediakan tiga jenis metode, yaitu triangulasi, nearest neighbor, dan continuous curvature (Okubo dkk, 2004). Ketiga metode ini menyajikan algoritma penentuan grid yang berbeda. Untuk itu perlu digali metode mana yang paling cocok dalam penyajian model permukaan digital dari data bathimetri, dengan melihat metode mana yang memiliki hasil interpolasi paling mendekati titik sampel.
I.2. Rumusan Masalah
Tahapan akhir pada pengolahan data MBES adalah visualisasi. Umumnya sebelum data bathimetri disajikan dalam bentuk peta bathimetri, perlu dilakukan proses gridding dengan spasi tertentu. Sebab beberapa proses perhitungan dan penurunan data topografi membutuhkan model data grid. Data MBES yang diolah pada software MB-System mengalami proses gridding yang berbasis GMT. GMT memiliki tiga metode gridding, yaitu nearest neighbor, continuous curvature, dan triangulasi.
Penelitian yang dilakukan oleh Bater dan Coops (2008) serta Yang dkk (2012) menunjukkan bahwa metode interpolasi grid yang berbeda akan menghasilkan titik elevasi yang berbeda. Perlu dilakukan pengkajian lebih dalam lagi, metode interpolasi grid manakah yang paling baik dalam menyajikan data bathimetri. Serta apakah pada pada jenis permukaan yang berbeda, metode interpolasi terbaik yang bisa digunakan juga berbeda.
I.3. Pertanyaan Penelitian
Berdasarkan permasalahan pada sub-bab 1.2 maka dapat dirumuskan beberapa pertanyaan penelitian sebagai berikut:
1. Apakah model permukaan digital hasil dari metode gridding triangulasi, nearest neighbor, dan continuous curvature bisa mewakili titik observasi dengan beda yang tidak signifikan?
2. Dalam penyajian model permukaan, metode manakah yang paling representatif dan baik diantara ketiga metode gridding tersebut?
I.4. Ruang Lingkup Masalah
Permasalahan yang akan dibahas pada penelitian ini dibatasi pada beberapa hal berikut:
1. Data bathimetri yang digunakan adalah hasil pengukuran MBES yang dilakukan oleh Kapal Baruna Jaya IV milik Balai Teknologi Survei Kelautan – BPPT Jakarta yang telah diolah sebelumnya. Pengolahan data MBES menggunakan software MB-System.
2. Data bathimetri yang digunakan berlokasi di laut dangkal, yaitu Selat Sunda. Survei dilakukan untuk investigasi lokasi kapal karam.
3. Perangkat lunak yang digunakan adalah MB-System dan GMT.
4. Metode gridding yang dibandingkan adalah metode triangulasi, nearest neighbor, dan continuous curvature.
5. Jenis permukaan yang dijadikan sampel ada tiga, yaitu permukaan yang relatif datar, curam, dan bergelombang (hilly).
6. Titik kedalaman hasil pengolahan MBES diasumsikan telah mewakili kedalaman sebenarnya.
I.5. Tujuan Penelitian Tujuan dari penelitian ini adalah sebagai berikut:
1. Mengetahui adanya perbedaan yang signifikan diantara perbandingan hasil ketiga metode gridding yang disediakan oleh software GMT dengan titik observasi.
2. Mengetahui metode gridding mana yang paling baik dalam menyajikan model permukaan digital dari data bathimetri pada jenis permukaan yang relatif datar, curam, dan bergelombang.
I.6. Manfaat Penelitian Manfaat dari penelitian ini adalah sebagai berikut:
1. Dapat dijadikan sebagai dasar penelitian selanjutnya tentang perbedaan metode gridding dari data bathimetri, khususnya menggunakan metode-metode lain.
2. Dapat mendalami pemanfaatan software GMT yang berbasis open source untuk melakukan penyajian data geografis.
3. Dapat dijadikan pertimbangan penentuan metode gridding yang tepat dalam penyajian data bathimetri sesuai dengan jenis permukaannya.
I.7. Tinjauan Pustaka
Kurnia (2014) melakukan pengolahan Data Multibeam Echosounder menggunakan perangkat lunak MB-System. Penyajian hasil dalam bentuk visualisasi 2D dan 3D menggunakan perangkat lunak Generic Mapping Tool (GMT). Setelah dilakukan pengolahan, data diuji kualitasnya dengan mengacu pada standar IHO pada orde spesial. Hasilnya semua hasil uji kualitas data telah memenuhi standar toleransi yang ditetapkan oleh IHO, sehingga data hasil pemrosesan dan koreksi menggunakan MB-System memiliki kualitas yang telah teruji sesuai dengan standar IHO pada orde spesial.
Yang dkk (2012) melakukan perbandingan 12 metode interpolasi grid yang disediakan software Surfer. Pada penelitian ini, Digital Terrain Model (DTM) dengan spasi grid lima meter dijadikan acuan. Kemudian data interpolasi dari metode gridding dengan spasi grid 40 meter dibandingkan dengan data acuan. Hasilnya tidak ada metode yang terbaik, tetapi terdapat metode paling optimal yang diterapkan sesuai dengan kondisi yang ada.
Penelitian tentang perbandingan metode gridding dilakukan oleh Braile (1978). Terdapat empat metode gridding yang dibandingkan, yaitu: weighted average of closest points, weighted average of three closest points with azimuth control, local polynomial surface fitting, dan piecewice cubic polynomial interpolation along profiles. Pengujian metode ini menggunakan data peta aeromagnetic barat daya Ilinois. Dari perbandingan hasil perhitungan Root Mean Square Error (RMSE) didapatkan hasil bahwa metode local polynomial surface fitting memiliki permukaan grid yang lebih akurat dibanding metode lainnya.
Heritage, dkk (2009) melakukan penelitian tentang pengaruh strategi survei dan model interpolasi terhadap kualitas Digital Elevation Model (DEM). Data yang digunakan didapatkan dari hasil pengukuran Terrestrial Laser Scanner (TLS) di
Sengai Nent, Inggris. Model interpolasi yang dibandingkan adalah metode Kriging, Variogram Kriging, Inverse Distance to a power, Minimum curvature, dan Triangulasi dengan interpolasi linear. Salah satu hasil penelitian ini adalah metode Triangulasi adalah metode interpolasi paling baik pada lingkungan fluvial.
Penelitian lain dilakukan oleh Okubo, Schultz, dan Stefanelli (2004) yang melakukan gridding terhadap data Mars Orbiter Laser Altimeter (MOLA) dan membandingkan efek ukuran piksel dan metode interpolasi pada DEM. Permukaan planet Mars dibuatkan model permukaan digital menggunakan software GMT. Metode gridding yang dibandingkan adalah metode nearest neighbor, triangulasi Delaunay, dan continuous spline in tension. Perbandingan dilakukan dengan menghitung perbedaan ketinggian dari data hasil interpolasi GMT dengan data hasil pengukuran. Kesimpulan dari penelitian ini adalah metode continuous spline in tension menghasilkan rerata beda ketinggian dan standar deviasi paling rendah dibanding metode lainnya, sehingga metode ini dipilih sebagai metode paling efektif dan akurat. Penelitian yang penulis lakukan bertujuan untuk membandingkan metode gridding nearest neighbor, continuous curvature, dan triangulasi terhadap titik-titik observasi yang mewakili kondisi sebenarnya. Proses perbandingan dilakukan dengan cara uji statistik dan uji kualitas sesuai dengan standar IHO, sehingga didapatkan metode yang paling mendekati kondisi sebenarnya. Data yang digunakan adalah data bathimetri hasil pengukuran MBES dengan tiga buah sampel jenis kelerengan, yaitu datar, bergelombang, dan curam.
I.8. Landasan Teori I.8.1. Survei Bathimetri
Bathimetri adalah metode atau teknik penentuan kedalaman laut atau profil dasar laut dari hasil analisa data kedalaman (BSN, 2010). Survei Bathimetri secara umum dilaksanakan dengan menggunakan tranduser memancarkan sekaligus menerima kembali gelombang suara tadi yang dipantulkan oleh dasar perairan. Perbedaan waktu saat gelombang dipancarkan dan diterima kembali dihitung, untuk menentukan kedalaman perairan tersebut. Pada waktu yang sama, seperangkat alat GPS digunakan untuk menentukan posisi kapal tersebut. (Anonim, 2012). Standardisasi kegiatan
survei bathimetri mengacu pada standar International Hydrographic Organization (IHO) Special Publication (SP) No. 44 tahun 2008. Secara umum, tahapan survei bathimetri adalah sebagai berikut:
a. Tahap Pengumpulan data
Tahap pengumpulan data merupakan tahap awal dalam survei bathimetri. Tahap pengumpulan data disini mencakup pengukuran kedalaman menggunakan multibeam echosounder, pengukuran sound velocity, pengamatan pasang surut dan penentuan posisi fix perum.
b. Pengukuran kedalaman
Pengukuran kedalaman bertujuan untuk memperoleh nilai kedalaman yang akan digunakan untuk memberoleh bentuk topografi dasar perairan. Pengukuran kedalaman memanfaatkan gelombang akustik yang dipancarkan tranduser yang dipasangkan di bawah vessel menuju dasar perairan dan dipantulkan kembali menuju hydrophone sehingga diperoleh nilai kedalaman berdasarkan waktu tempuh gelombang akustik pergi-pulang.
Kedalaman suatu perairan dapat dinyatakan dalam persamaan (I.1),
d
=½
. 𝝂 . 𝛥
t
...(I.1) Keterangand : kedalaman perairan yang terukur
v : cepat rambat gelombang suara ( +/- 1500 m/s )
𝛥
t : rentang waktu antara gelombang suara yang saat dipancarkan dengan saat gelombang diterima kembali.I.8.2. Prinsip Kerja Multibeam Echosounder
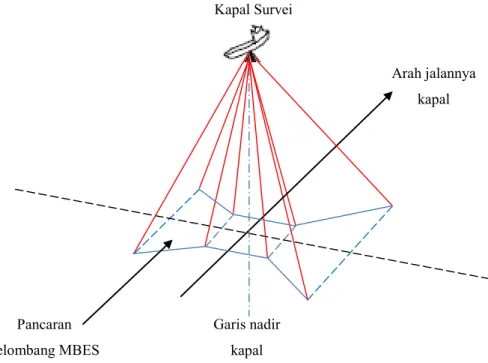
Prinsip kerja Multibeam echosounder adalah dengan memanfaatkan gelombang akustik yang dapat merambat dengan baik di bawah air. Multibeam echosounder akan memancarkan gelombang akustik dan kemudian akan dipantulkan kembali ketika gelombang tersebut menyentuh material di dasar laut. Gelombang kembali atau pantulan gelombang akan diterima kembali oleh sensor (receiver) dan akan dihitung beda waktu saat gelombang dipancarkan dan saat gelombang kembali diterima, sehingga dapat diketahui kedalaman dasar laut yang diakusisi. Pola pancaran
melebar dan memanjang terhadap badan kapal, dan setiap beam yang dipancarkan mendapatkan satu titik kedalaman yang jika dihubungkan akan membentuk profil dasar laut. Dan jika kapal bergerak maju hasil sapuan multibeam tersebut akan menghasilkan suatu luasan yang menggambarkan permukaan dasar laut.
Sistem pemancaran gelombang pada multibeam echosounder ada dua yaitu sistem sweep dan sistem swath. Sistem sweep bekerja dengan memancarkan banyak gelombang single atau dengan kata lain merupakan multi-single beam, sedangkan sistem swath bekerja dengan satu pancaran gelombang yang memiliki lebar dan panjang yang membentuk sebuah kolom dan dapat juga dipakai sebagai Side Scan Sonar (SSS) (de Jong dkk, 2010). Apabila sistem swath dan sistem sweep dibandingkan, sistem swath akan menghasilkan area lebih besar pada perairan dalam, namun pada perairan dangkal kedua sistem tersebut akan menghasilkan cakupan area yang sama.
Gambar I.1. Ilustrasi sapuan multibeam echosounder
Pada sistem swath maupun sistem sweep multibeam echosounder mempunyai alat yang bernama tranduser yang digunakan sebagai pemancar gelombang akustik dan dilengkapi sensor (receiver) untuk menangkap kembali sinyal pantulan dari dasar laut. Konfigurasi tranduser adalah gabungan beberapa stave yang tersusun seperti array (matrik). Stave adalah bagian trasduser yang berfungsi sebagai saluran untuk
Arah jalannya kapal Kapal Survei Garis nadir kapal Pancaran gelombang MBES
memancarkan maupun menerima pulsa akustik hasil pantulan dari dasar laut (stave tranducer beam). Stave - stave tersebut akan menerima sinyal akustik dari segala arah hasil pantulan objek - objek di dasar laut. Semakin dekat objeknya dengan sumber maka intensitasnya pun semakin kuat. Gelombang akustik yang dipantulkan tersebut kemudian dianalisis oleh tranduser dan dapat dibedakan gelombang pantul yang datang dari arah yang berbeda. Tiap stave pada multibeam tersebut memancarkan sinyal akustik dengan kode tertentu sehingg kode sinyal antara stave yang satu dengan stave yang lain berbeda walaupun menggunakan frekuensi yang sama.
Sebuah tranduser menggunakan tiga prinsip untuk mendeteksi arah datangnya sinyal yang dipantulkan oleh dasar laut yaitu pendeteksian amplitudo, fase dan interferometrik (sudut). Kebanyakan multibeam echosounder menggunakan teknik interferometrik untuk mendeteksi arah datangnya gelombang pantul sebagai fungsi dari waktu.
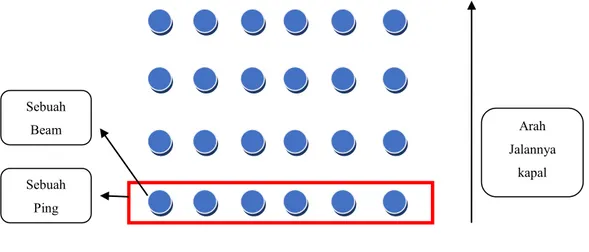
Pada multibeam echosounder, dua istilah, yaitu ping dan beam. Ping adalah sekali tembakan gelombang yang diterima kembali oleh tranduser. Di dalam satu ping dapat mencakup beberapa beam. Beam inilah yang menjadi footprint dari multibeam echosounder. Ilustrasinya dapat dilihat pada Gambar I.2. Singlebeam echosounder hanya memiliki 1 beam dalam sekali ping. Titik-titik kedalaman hasil pengukuran MBES memiliki pola yang tidak beraturan. Hal ini ditunjukkan pada gambar I.3.
Gambar I.2. Ilustrasi ping dan beam Sebuah Ping Sebuah Beam Arah Jalannya kapal
Gambar I.3. Sebaran titik MBES yang tidak merata
I.8.3 Kalibrasi Multibeam Echosounder
Setiap pengukuran pada dasarnya harus dilakukan kalibrasi terlebih dahulu untuk meminimalisir kesalahan sistematik karena alat. Kalibrasi merupakan kegiatan untuk memeriksa dan menentukan besarnya kesalahan yang ada dalam alat ukur. Sebelum pengukuran kedalaman menggunakan multibeam echosounder dilakukan perlu adanya kalibrasi pada alat multibeam echosounder. Menurut presentasi dari L3 Communication Elac Nautik (2009) paling tidak ada empat jenis kalibrasi yang harus dilakukan sebelum pengukuran dimulai yaitu :
1.8.3.1 Kalibrasi nilai offset
Kalibrasi nilai offset ini diukur atau ditentukan dari titik referensi atau titik tengah kapal. Pada saat pengukuran terkadang pemasangan alat tidak dalam posisi yang sama. Setiap posisi alat didefinisikan menjadi posisi X, Y, dan Z, hal ini menyesuaikan dengan bentuk kapal yang memiliki panjang lebar dan tinggi.
Keterangan gambar: Titik-titik berwarna hitam
merupakan sebaran titik kedalaman yang dihasilkan oleh MBES
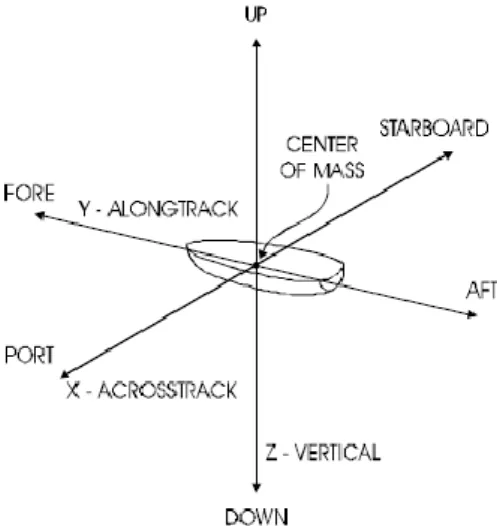
Gambar I.4. Sistem koordinat pada kapal (Anonim, 2000)
Pada pendefinisian koordinat alat, nilai X positif didefinisikan dari titik tengah kapal kearah kiri (port), sedangkan Y positif dari titik tengah kearah depan kapal (fore), dan Z positif dari titik tengah kearah bawah kapal. Gambar I.4 menunjukkan sistem koordinat pada kapal. Pada dasarnya nilai offset ini didefinisikan untuk mendapatkan nilai posisi sebenarnya dari titik pemeruman karena terkadang posisi GPS dan tranduser tidak pada titik yang sama. Sehingga dari nilai offset yang ada dapat dihitung posisi sebenarnya pada tranduser bukan pada titik dipasangnya GPS.
1.8.3.2. Kalibrasi roll
Kalibrasi roll adalah kalibrasi yang digunakan untuk mengkoreksi kesalahan kedalaman akibat perubahan gerakan kapal searah putaran sumbu Y. Kesalahan ini juga bisa terjadi akibat pemasangan tranduser yang tidak sama rata antara kedua sisi. Kalibrasi roll ini penting dilakukan karena pengaruhnya sangat besar dan harus dilakukan secara hati - hati. Arah yang seharusnya benar adalah sepanjang sumbu X namun terdapat kesalahan sebesar α. Ilustrasi kesalahan roll dapat dilihat pada gambar I.5. Nilai α ini dapat dicari dengan persamaan (I.2)
α = Arctan
(
𝑥Keterangan: α = Sudut roll
x = Ukuran yang menyimpang pada sumbu X y = Ukuran yang menyimpang pada sumbu Y
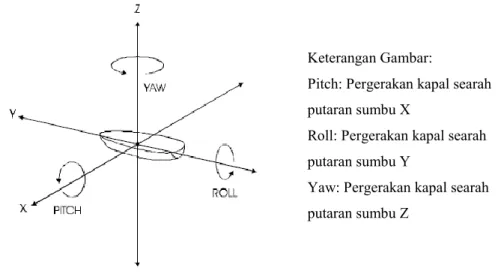
Gambar 1.5. Perputaran sumbu koordinat kapal dari pusat massa (Anonim, 2000)
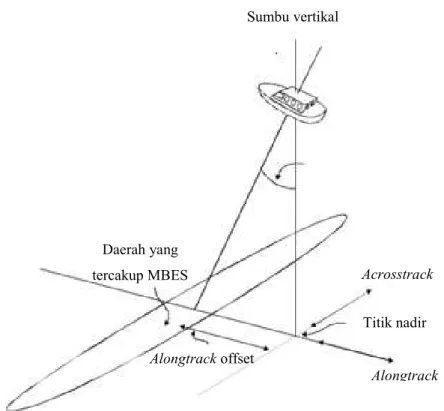
1.8.3.3. Kalibrasi pitch
Kalibrasi pitch merupakan pekerjaan untuk meminimalisir kesalahan akibat anggukan kapal atau pergerakan kapal searah putaran sumbu X. Kesalahan ini akan mengakibatkan pergeseran jalur akibatnya geometri dari jalur pengukuran menjadi tidak sesuai. Ilustrasi besar pergeseran atau offset yang disebabkan oleh kesalahan pitch dapat dilihat pada gambar I.6.
Keterangan Gambar:
Pitch: Pergerakan kapal searah putaran sumbu X
Roll: Pergerakan kapal searah putaran sumbu Y
Yaw: Pergerakan kapal searah putaran sumbu Z
Gambar I.6. Ilustrasi offset ping yang terjadi akibat kesalahan pitch (Anonim, 2000)
Jarak antara kesalahan figur pada kedua jalur disimbolkan sebagai da. Penjelasan lebih lanjut mengenai da bisa dilihat pada Gambar I.6.
Gambar I.7. Penjelasan mengenai da (Anonim, 2009)
Titik putih merupakan letak dari objek yang sebenarnya, namun karena kesalahan pitch maka objek berubah posisi menjadi bulatan merah. Untuk mendapatkan nilai koreksi nya yaitu pitch offset maka bisa dicari dengan persamaan (I.3). dα = arctan
(
𝑑𝑎 2𝑧)
... (I.3) Daerah yang tercakup MBES Alongtrack offset Alongtrack Acrosstrack Titik nadir kapalKeterangan: dα : pitch offset
da : jarak antara dua objek yang mengalami kesalahan z : kedalaman
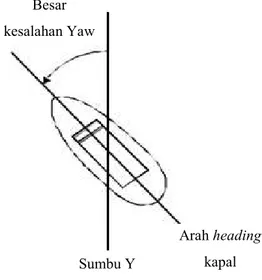
1.8.3.4. Kalibrasi yaw (Gyro)
Kalibrasi yaw adalah kalibrasi yang dilakukan untuk mengurangi kesalahan akibat perubahan dari heading kapal sepanjang survei berjalan. Kesalahan ini biasanya dikarenakan angin kencang atau gelombang yang menghempas kapal. Gambar I.8 memperlihatkan ilustrasi dari kesalahan yaw. Persyaratan dari kalibrasi yaw (gyro) adalah sebagai berikut (Anonim, 2000):
i. Melintasi dua lajur yang sejajar dengan spasi 2 kali kedalaman ii. Arah yang sama
iii. Jalur kapal melintasi kedangkalan dengan gradien yang tajam
iv. Kecepatan sama dan menggunakan pancaran terdalam yang overlap sebagai koreksi.
Gambar I.8. Ilustrasi kesalahan yaw (Anonim, 2000) Arah heading kapal Sumbu Y Besar kesalahan Yaw
I.8.4 MB-System
MB-System adalah software untuk mengolah data sonar hasil pemetaan bathimetri dalam lebih dari empat lusin format dari peralatan sonar yang dioperasikan di seluruh dunia. MB-System secara khusus digunakan dengan dengan dihubungkan pada Generic Mapping Tools (GMT). GMT adalah kumpulan proses yang efektif untuk memanipulasi data dan membuat post script yang menyertai peta. MB-System dapat mendukung berbagai data sonar (Ferreira, 2013)
MB-System merupakan perangkat lunak open source yang berjalan dalam sistem operasi Linux. Source Code untuk MB-System dapat diunduh secara bebas pada situs www.mb‐system.org. Mirip seperti GMT, MB-System secara umum berisi kumpulan command line tools, tapi juga memiliki beberapa editor dengan tampilan grafis.
Adapun pemanfaatan MB-System sekarang lebih banyak pada pengolahan data Multi Beam Echo Sounder. Tetapi software ini juga dapat dimanfaatkan untuk mengolah data bathimetri lain, seperti Side Scan Sonar (Ferreira, 2013)
Pada penelitian yang dilakukan oleh (Caress dkk, 2008), data Sidescan diproses setelah dilakukan editing data bathimetri dan navigation adjustment. Kemudian data Sidescan dikoreksi untuk berbagai variasi amplitude dan grazing angle menggunakan model rerata yang didapatkan dari data mentah. Selanjurnya adalah dengan melakukan mosaicking citra side scan dengan prioritas tertentu untuk melihat azimuth dan swath position.
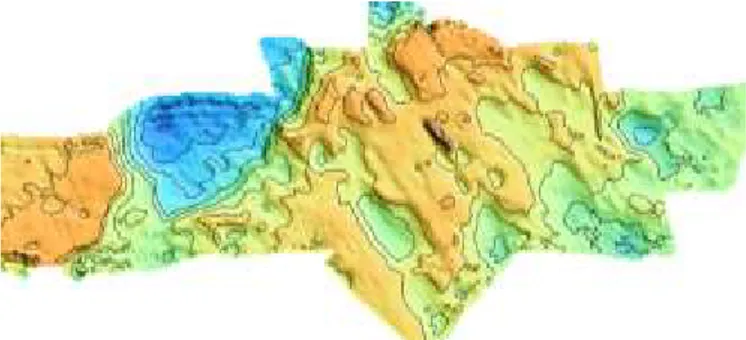
Beberapa hal yang menjadi keunggulan dari software ini adalah kemudahan dalam melakukan plotting data bathimetri, cukup memasukkan perintah sederhana pada command line. Selain itu, dapat melakukan konversi dari berbagai format data yang dikeluarkan oleh vendor. MB-System juga bisa menghitung roll and pitch bias serta melakukan koreksi terhadapnya. (Schmidt, Caress, dan Chayes, 2008). Salah satu contoh hasil dari pengolahan data bathimetri pada software MB-System dapat dilihat pada gambar I.9.
Gambar I.9. Hasil plotting data bathimetri pada software MB-System.
I.8.5. Generic Mapping Tool
Generic Mapping Tool (GMT) adalah paket software yang digunakan untuk membuat sebuah visualisasi atau gambar. GMT dapat melakukan berbagai proses pengolahan data untuk menghasilkan gambar. Mulai dari mengubah kolom dari data tabular, time-series, dan data grid, serta menampilkan data tersebut dalam berbagai jenis gambar, plot x-y sederhana sampai peta dengan berbagai perspektif dan ilustrasi relief dan bayangan. GMT menggunakan bahasa Postscript (Wessel dkk, 2015a)
GMT populer digunakan karena sifatnya open source atau gratis. Selain itu GMT memiliki fleksibilitas dalam mengolah data karena perintah-perintah dalam GMT menggunakan command line. GMT juga bisa diinstal pada hampir semua sistem operasi komputer (Wessel dkk, 2015a). Contoh sistem operasi yang mendukung GMT adalah sistem operasi Linux dan Macintosh.
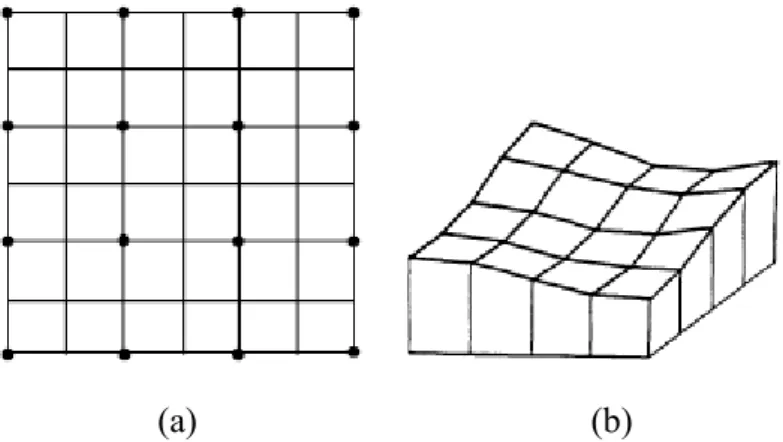
I.8.6. Model Grid
Grid adalah bentuk penyajian data spasial dalam bentuk grafik Cartesian dengan spasi titik yang teratur pada sumbu x dan y. Model grid adalah salah satu pendekatan utama untuk pembentukan model permukaan digital (Li dkk, 2005). Metode rekonstruksi data pengukuran yang tidak teratur menjadi bentuk Cartesian grid disebut dengan proses gridding (Sedarat dan Nishimura, 2000).
(a) (b) Gambar I.10. Model grid (Li dkk, 2005)
Pada pembentukan model permukaan digital, model grid memiliki banyak keuntungan (Li dkk, 2005). Salah satunya yaitu dalam hal penanganan data. Contoh model grid ada pada gambar 1.9a. Ilustrasi model permukaan digital berbasis grid dapat dilihat pada gambar 1.9b. Semakin kecil ukuran grid, maka model permukaan akan semakin lembut
Untuk membentuk model grid dari titik-titik yang tidak beraturan diperlukan proses interpolasi. Ilustrasi model grid yang terbentuk dari titik-titik yang tidak beraturan dapat dilihat pada gambar I.11. Terdapat banyak metode untuk melakukan interpolasi grid. Gallant dan Hutchinson (2005) menjelaskan metode triangulasi, local surface patches, dan locally adaptive gridding. Sementara Yang dkk (2012) menjelaskan 12 metode gridding yang disediakan oleh software Surfer.
Gambar I.11. Ilustrasi pembentukan model grid dari titik observasi yang tidak beraturan (Matarozzo, 2004)
I.8.7. Metode Gridding Triangulasi
Metode gridding triangulasi memanfaatkan algoritma triangulasi Delaunay. Titik-titik observasi membentuk segitiga dengan algoritma Delaunay. Setiap segitiga yang terbentuk mendefinisikan sebuah bidang datar diatas titik grid didalam segitiga. Kemiringan dan elevasi segitiga ditentukan dari tiga titik data yang membentuk segitiga. Metode gridding triangulasi bekerja paling baik ketika data awal telah terdistribusi diatas area grid (Yang, 2012).
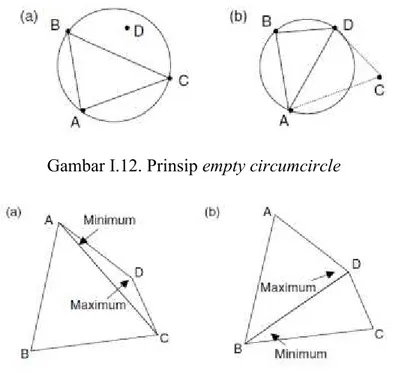
Algoritma triangulasi Delaunay memiliki tiga prinsip untuk membentuk rangkaian segitiga yang optimal. Pertama prinsip empty circumcircle, ketika tiga titik disambungkan menjadi sebuah lingkaran, maka tidak boleh ada titik lain didalam lingkaran tersebut. Kedua, rangkaian segitiga yang dibentuk harus memenuhi prinsip local equiangularity (Tsai, 1993). Prinsip ini mengatakan bahwa pada jaringan segitiga yang menggabungkan dua segitiga, maka jika diagonal yang membatasi segitiga tersebut ditukar posisinya tidak akan mengubah sudut jaringan tersebut secara drastis. Artinya sudut minimum pada jaringan tersebut tidak akan berubah menjadi maksimal jika diagonalnya ditukar, begitupun sebaliknya. Ketiga, jari-jari pada lingkaran yang menghubungkan ketiga titik harus sekecil mungkin.
Gambar I.12. Prinsip empty circumcircle
Pada gambar 1.12.a, segitiga yang terbentuk tidak termasuk segitiga Delaunay, karena titik D berada didalam lingkaran. Gambar 1.12.b menunjukkan segitiga Delaunay. Gambar 1.13.a tidak menunjukkan segitiga Delaunay, karena memiliki sudut maximum dan minimum yang berbeda secara drastis. Gambar 1.13b menunjukkan segitiga Delaunay yang optimal.
I.8.8. Metode Gridding Nearest Neighbor
Metode gridding Nearest neighbor memberikan nilai dari titik observasi terdekat dari titik grid (Anonim, 2011). Metode ini sangat berguna apabila data telah memiliki spasi titik yang merata. Ketika data berada dekat dengan grid tetapi terdapat beberapa nilai yang hilang, metode ini efektif untuk mengisi lubang yang ada di data observasi. Pada software GMT, radius pencarian titik observasi terdekat dari titik grid dapat ditentukan.
Secara umum terdapat dua cara mencari titik observasi terdekat dari titik grid (Huang dkk, 2012), yaitu: (1) menentukan jumlah titik tertentu yang ada disekitar titik grid dan (2) Semua titik yang ada pada radius tertentu di sekitar titik grid (J-nearest points). Metode lainnya yaitu dengan menggunakan KD-tree (Xiao, Liu, dan Nie, 2011). Metode pencarian KD-tree memandaatkan indeks struktur dua dimensi, dan memiliki struktur lebih sederhana dan proses traversing yang lebih sederhana. Caranya dengan membagi kotak grid menjadi dua bagian sehingga membatasi titik observasi yang ada di dalamnya. Pada gambar 1.13. titik p5 berada tepat di garis yang membatasi kedua grid. Kemudian dibuat dua garis yang membagi dua kotak pertama, disini titik p2 dan p7 terkena garis tersebut. Langkah ini diulangi terus sehingga terbentuk search path untuk mencari titik p4, p1, p8, dan p9 yang jaraknya paling dekat dengan titik grid.
(a) (b) Gambar I.14. Algoritma pencarian KD-tree (Huang dkk, 2012)
I.8.9. Metode Gridding Continuous Curvature
Metode continuous curvature, atau continuous spline in tension pertama kali diperkenalkan oleh Smith dan Wessel (1990). Metode ini adalah generalisasi dari metode minimum curvature. Pada metode minimum curvature, sebuah interpolant dengan turunan kedua kontinyu dibangun sehingga lengkungan kuadrat yang digabungkan pada seluruh permukaan menjadi minimal. Grid dihasilkan dengan menerapkan persamaan secara berulang untuk memperoleh grid yang lembut (Anonim, 2011). Persamaan tersebut akan diulangi sampai mencapai jumlah batas iterasi yang ditentukan. Metode ini memiliki analogi seperti lembaran karet tipis yang diregangkan sehingga menghasilkan permukaan yang halus dan kontinyu.
Persamaan awal dari algoritma minimum curvature ditunjukkan persamaan (I.4). C
= ∬(𝛁
2z)
2 dx dy...(I.4) Persamaan (I.4) valid untuk total kelengkungan dari z ketika |∇z| kecil. Briggs (1974) menunjukkan bahwa memperkecil persamaan (I.4) membawa pada persamaan diferensial (I.5).
𝛁
2(𝛁
2z) = ∑
𝑓
𝑖 i
𝛿
(
x – xi,
y - yi)
... (I.5)Perubahan kecil z pada plat elastis dengan konstanta flexural rigidity D, bergantung pada tekanan vertikal normal q dan tekanan horizontal konstan per unit panjang vertikal Txx, Txy, dan Tyy, memenuhi persamaan (I.6).
D
𝛁
2(𝛁
2z) – [
Txx 𝜕2𝑧𝜕𝑥2 + 2Txy 𝜕𝑥𝜕𝑦𝜕2𝑧+
Tyy 𝜕𝑦2𝜕2𝑧]
= q...(1.6)
Pada persamaan (1.4), ketika T = 0, maka menjadi ekuivalen dengan persamaan (1.5); tetapi untuk nilai T yang besar, solusi didominasi oleh persamaan kedua. Disini T adalah tekanan per unit panjang dan nilai T dibutuhkan untuk menyesuaikan solusi untuk D dan q, hal ini dihindari dengan persamaan (1.7)
(
1 – T1) ∇
2(∇
2z) –
Ti∇
2z= ∑
𝑖𝑓
iδ(
x – xi, y – yi)
... .(1.7)Disini T1 merupakan tension parameter dan I menunjukkan internal tension. Nilai T1 bervariasi mulai dari 0 sampai 1, dengan 0 dan 1 digambarkan sebagai garis utuh. Dengan analogi elastis, T1 = 0 merepresentasikan infinite tension. Untuk nilai T1 pada 0 <= T1 < 1, persamaan (I.7) memberikan solusi dengan lengkung kontinyu, meskipun ini tidak akan memperkecil persamaan (I.4), kecuali T1 = 0.
Persamaan-persamaan diatas akan menghasilkan solusi unik yang disebut dengan true solution. Tersebab persamaan tersebut diselesaikan dengan cara iterasi dengan presisi terbatas, maka tidak akan dicapai true solution. Sehingga hasilnya tergantung pada batas konvergensi dari iterasi yang dilakukan. Iterasi akan mencapai batas konvergensi ε ketika perubahan absolut maksimal pada node selama satu kali iterasi lebih kecil dari ε. Hal ini bukan berarti hasilnya ada di dalam ε dari true solution; ini berarti perbaikan lebih lanjut pada hasil akan lebih kecil dari ε untuk setiap iterasi.
I.8.10. Uji Kualitas
Robinson dan Metternicht (2005) melakukan perbandingan beberapa metode interpolasi. Dilakukan perbandingan antara data yang telah diketahui (data observasi) dengan data prediksi (hasil interpolasi) menggunakan mean error (ME) dan root mean square error (RMSE). Persamaan ME serupa dengan varian sampel, sedangkan RMSE serupa dengan standar deviasi, seperti pada persamaaan (I.9) dan (I.10) (Johnson dan Bhattacharyya, 2010). Jika nilai prediksi sama dengan nilai observasi, maka standar deviasi akan sama dengan nol, seperti pada persamaan (I.8). Sehingga besaran standar deviasi akan menunjukkan kedekatan nilai-nilai hasil prediksi dengan nilai observasi. Semakin kecil standar deviasi, nilai prediksi akan semakin mendekati nilai observasi.
S (Simpangan) = S
(x
i– x
t)
...(I.8)𝜎
2 = ∑ (xi – xt) 𝑛 𝑖=1 2 𝑛−1...(I.9)
𝜎
= √𝜎
2 ...(I.10) Keterangan:xi = titik hasil interpolasi xt = titik observasi n = jumlah sampel 𝜎2 = Varian
𝜎 = Standar Deviasi
Untuk menentukan kualitas dari titik kedalaman hasil interpolasi dengan titik observasi, dilakukan uji kualitas beda kedalamannya. Uji kualitas ini mengaju pada batas toleransi yang diatur pada IHO SP-44 tahun 2008 dan SNI 7646-2010 untuk tingkat kepercayaan 95%. Persamaan untuk menghitung batas toleransi dapat dilihat pada persamaan I.11.
±√𝑎2+ (𝑏 𝑥 𝑑)2 ...(I.11) Keterangan:
a : Bagian ketidak pastian yang tidak tergantung kedalaman b : Koefisien ketidak pastian yang tergantung dengan kedalaman d : kedalaman rata-rata
(b x d) : Bagian ketidak pastian yang tergantung dengan kedalaman
Nilai a dan b pada persamaan I.11 sesuai dengan orde survei yang dilakukan seperti tercantum pada Tabel I.1 menurut IHO SP-44 tahun 2008.
Tabel I.1. Standar Ketelitian Kedalaman
Spesial 1a 1b 2
Konstanta a = 0.025m
b = 0.075m a = 0.5m b = 0.013m a = 0.5m b = 0.013m a = 1.0m b = 0.023m Uji kualitas ini dilakukan dengan menghitung nilai kesalahan data beda kedalaman dengan tingkat kepercayaan 95%, yang jika mengacu pada IHO SP-44
Orde Ketentuan
tahun 2008 sebesar 1.96 x 𝜎. Jika nilai ini masih masuk kedalam batas toleransi yang diperoleh dengan persamaan I.11, maka beda kedalaman masih dalam batas toleransi.
I.8.9. Uji Perbandingan Data
Uji perbandingan data dilakukan untuk membandingkan apakah data kedalaman sebuah lajur berbeda secara signifikan dengan data kedalaman lajur lain yang bertampalan. Untuk melakukan uji perbandingan ini dilakukan uji Z, karena jumlah sampel yang diambil dapat dikategorikan sebagai sampel besar (>30).
Persamaan untuk mencari nilai Z0 pada sampel yang berpasangan telah dijabarkan oleh Widjajanti (2011) seperti pada rumus (I.12). Berdasarkan nilai Z0, dapat diketahui apakah data kedalaman hasil pengukuran masuk dalam batas toleransi atau tidak dengan tingkat kepercayaan 95% (± 1.96).
...(I.12)
Keterangan:
= Rerata kedalaman lajur 1 = Rerata kedalaman lajur 2
= Varian Sampel lajur 1 = Varian Sampel lajur 2 n1 = Jumlah Sampel lajur 1 n2 = Jumlah Sampel lajur 2 Hipotesis:
a. H0 ; atau b. HI; atau
Sehingga:
a. H0 ditolak, jika Z0 > +1.96 atau Z0 < -1.96 b. H0 diterima, jika -1.96 < Z0 < +1.96 2 2 2 1 2 1 2 1 0 n n x x Z 1 x 2 x 2 1
2 2
2 1 1 2 2 1 12 Keterangan: H0 = Hipotesis nol HI = Hipotesis alternatif
= Selisih kedalaman
I.9. Hipotesis
Metode yang berbeda akan menghasilkan nilai yang berbeda, maka pada jenis permukaan yang relatif datar, curam, dan tidak rata diperkirakan masing-masing memiliki metode gridding terbaik yang berbeda. Diperkirakan seluruh metode gridding tidak memiliki perbedaan yang signifikan dari titik observasi.