STUDI EKSPERIMENTAL ENERGI BANGKITAN
VIBRATION ENERGY RECOVERY SYSTEM (VERS) GENERASI I DAN PENGARUHNYA TERHADAP PERFORMA SUSPENSI MOBIL ISUZU PANTHER
Dito Renady Harto Jurusan Teknik Mesin
Institut Teknologi Sepuluh Nopember
Jl. Arief Rahman Hakim, Kampus Sukolilo, Surabaya Jawa Timur, Indonesia
Telp. (031) 5946230, Fax. (031) 5922941, E-mail: [email protected] Abstrak
ABSTRAK
Menurut Center for Energy, Transportation and the Environment (CETE) sebuah program penelitian yang diterapkan oleh University of Tennessee Chattanooga untuk mengembangkan dan menyebarkan teknologi maju yang memanfaatkan sumber yang bersih dan aman energi, sebuah kendaraan motor pembakaran dalam hanya efektif menggunakan 16% dari tenaga bahan bakar yang digunakan untuk menjalankan mobil. Sisanya sebesar 65% menjadi engine losses sebagai panas dan getaran, 11% engine idling, 6% transmission losses, serta 2% dari penambahan aksesori seperti Air Conditioner (AC). Beberapa cara telah dilakukan untuk memanen energi yang terbuang tersebut, seperti Kinetic Energy Recovery System (KERS) yang memanen energi terbuang saat pengereman, Thermal Energy Recovery System (TERS) yang memanen energi terbuang dari panas engine kendaraan, dan Vibration Energy Recovery System (VERS) yang memanen energi terbuang dari getaran saat sistem suspensi bekerja.Dalam tugas akhir ini, akan dilakukan studi eksperimental karakateristik generator dan energi bangkitan yang dapat dihasilkan VERS hasil rancang bangun kami pada kendaraan uji. Kemudian energi listrik bangkitan dari VERS yang diujikan selama bebrapa waktu. Selain energi listrik bangkitan, tugas akhir ini juga akan melakukan studi performa sistem suspensi dengan melakukan perbandingan grafik respon suspensi ketika tidak menginstalasikan VERS dan saat mengintalasikan VERS.Dari tugas akhir ini didapatkan redaman yang dihasilkan VERS adalah 1,75 (Nm/s). Penambahan nilai ini terhadap redaman sistem suspensi yang sudah ada akan berakibat menurunnya kinerja suspensi sebesar 6 % bila diujikan dengan suspension tester, namun voltase maksimum yang dihasilkan VERS saat pengujian sebesar 1,16 v dan arus maksimum sebesar 0,03 A..
Kata kunci: Energy harvesting, voltase bangkitan, sistem suspensi mobil, gear box, pengukuran 1. Pendahuluan
Hukum kekekalan energi mengatakan bahwa energi tidak dapat dibuat dan energi tidak dapat dihancurkan, energi hanya bisa diubah dari satu bentuk ke bentuk lain. Berangkat dari hukum tersebut, dapat disimpulkan bahwa manusia tidak akan kekurangan energi sampai akhir masa. Namun, saat ini isu yang berbanding terbalik dengan hukum tersebut yaitu kekurangan energi justru timbul ke permukaan. Isu tersebut timbul karena kekurang siapan kita dalam memanfaatkan segala bentuk energi
yang beredar dalam kehidupan. Sejak revolusi industri manusia sudah menetapkan sebuah sumber energi yang sebenarnya jumlahnya sangat terbatas. Akibatnya energi menjadi semakin mahal dari waktu ke waktu dan terasa makin menipis. Mulailah manusia mengenal suatu usaha dalam melakukan proses untuk mendapat energi dari sumber lain seperti matahari, termal, angin, gradien salinitas, atau energi kinetis. Lalu dengan suatu mekanisme yang dikembangkan sedemikian rupa dapat menangkap dan menyimpan energy tersebut untuk
digunakan dalam pemenuhan kebutuhan perangkat kebutuhan manusia. Kegiatan ini disebut dengan memanen energi (energy harvesting). Sejak beberapa dekade lalu
manusia mencoba untuk mengeksplorasi kemungkinan pemanenan energi ini untuk memanfaatkan energi yang terbuang dari aktivitas hari. Aktivitas
sehari-hari itu antara lain adalah aktivitas berjalan, transportasi, olah raga, hiburan, ekspedisi, dan kegiatan-kegiatan lain yang umum dilakukan manusia walau pemanenan masih dilakukan dalam skala kecil. Sumber-sumber energi yang biasa dipakai dalam memanen energi ini antara lain adalah radiasi ambien, biomekanik, piezoelektrik, piroelektrik, termoelektrik, elektrostatik, biofuelcell (gula darah atau glukosa), aktivitas metabolisme pepohonan, polimer elektroaktif, atau generator mini.
Contoh produk yang telah umum diketahui dari kegiatan memanen energi tersebut adalah senter atau alat penerangan darurat yang memiliki sumber energi dari gerakan tangan. Prinsip dari senter ini pada intinya adalah getaran (vibrasi). Energi genggaman tangan yang berulang tersebut merupakan energi yang dimanfaatkan untuk menggenerisasi cahaya senter. Contoh lain adalah pemanfaatan energi potensial tekanan akibat berat mobil sebagai sumber pencahayaan dari penanaman piezoelektrik di jembatan dan polisi tidur. Tenaga yang kita dapatkan dari berat mobil tersebut bisa dimanfaatkan sebagai energi pada lampu penerangan jalan yang dilalui oleh mobil.
Berbeda dengan kedua contoh di atas, tugas akhir ini akan membahas mengenai gerak relatif naik-turun suspensi yang akan ditangkap oleh sebuah alat terpisah dan dikonversi menjadi energi listrik. Alat pemanen energi yang akan dikembangkan ini memanfaatkan gerak naik-turun suspensi yang kemudian dikonversi menjadi gerak rotasi. Gerak rotasi ini akan dilipatgandakan melalui gear box dan dihubungkan ke generator sehingga menghasilkan listrik. Alat ini dinamakan Vibration Energy Recovery System (VERS).
2. Dasar Teori
Sistem Massa Pegas Sederhana
Contoh sistem getaran yang paling sederhana dapat dilihat pada gambar 2.8.
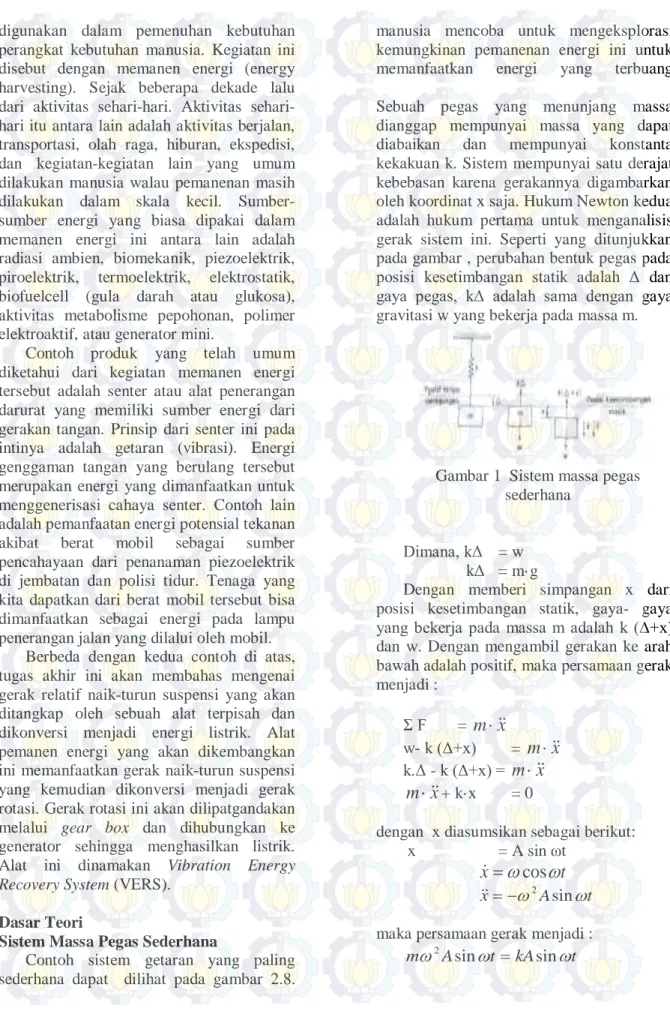
Sebuah pegas yang menunjang massa dianggap mempunyai massa yang dapat diabaikan dan mempunyai konstanta kekakuan k. Sistem mempunyai satu derajat kebebasan karena gerakannya digambarkan oleh koordinat x saja. Hukum Newton kedua adalah hukum pertama untuk menganalisis gerak sistem ini. Seperti yang ditunjukkan pada gambar , perubahan bentuk pegas pada posisi kesetimbangan statik adalah Δ dan gaya pegas, kΔ adalah sama dengan gaya gravitasi w yang bekerja pada massa m.
Gambar 1 Sistem massa pegas sederhana
Dimana, kΔ = w kΔ = m·g
Dengan memberi simpangan x dari posisi kesetimbangan statik, gaya- gaya yang bekerja pada massa m adalah k (Δ+x) dan w. Dengan mengambil gerakan ke arah bawah adalah positif, maka persamaan gerak menjadi : Σ F =
m
⋅
x
w- k (Δ+x) =m
⋅
x
k.Δ - k (Δ+x) =m
⋅
x
x
m
⋅
+ k·x = 0dengan x diasumsikan sebagai berikut: x = A sin ωt
t
x
=
ω
cos
ω
t A x=−ω
2 sinω
maka persamaan gerak menjadi :t kA t A
m k n = 2
ω
atau m k n =ω
dengan A dan B adalah konstanta yang diberikan dari kondisi awal x(0) danx(0), sehingga persamaan menjadi :
t x t x x n n n
ω
ω
ω
sin (0)cos ) 0 ( + = Gerak HarmonikGerak osilasi dapat berulang secara teratur, seperti pada roda pengimbang arloji atau juga sangat tidak teratur seperti pada gempa bumi. Jika gerak tersebut berulang dalam selang waktu yang sama (
τ
), maka disebut gerak periodik. Waktu pengulanganτ
disebut periode osilasi dan kebalikannya,τ
1 =f yang disebut frekuensi
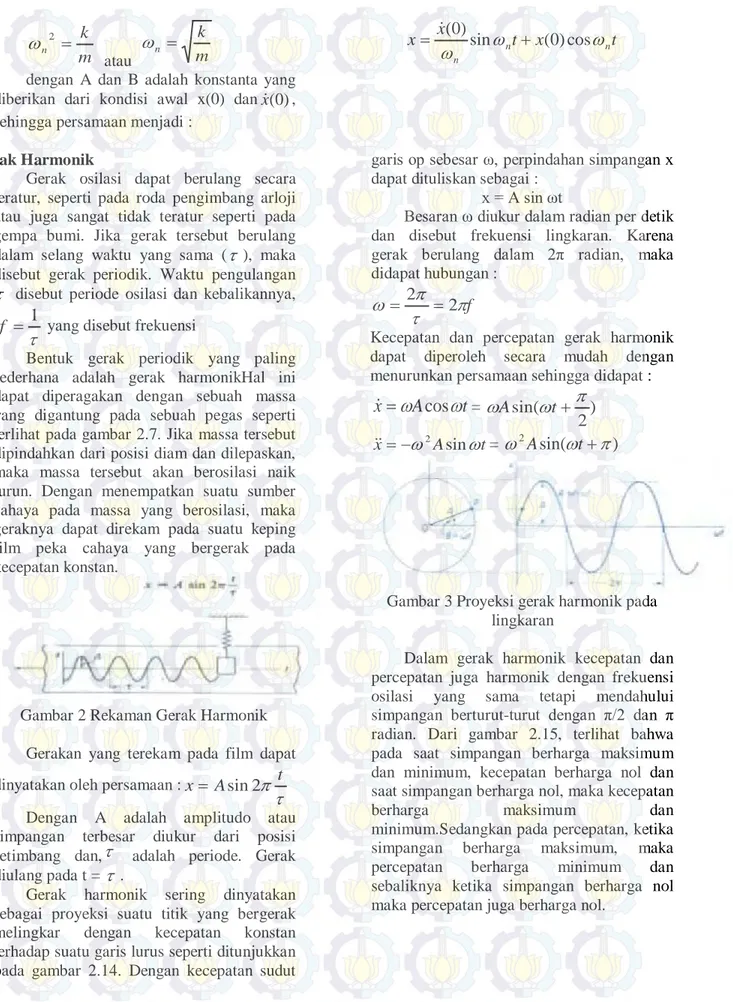
Bentuk gerak periodik yang paling sederhana adalah gerak harmonikHal ini dapat diperagakan dengan sebuah massa yang digantung pada sebuah pegas seperti terlihat pada gambar 2.7. Jika massa tersebut dipindahkan dari posisi diam dan dilepaskan, maka massa tersebut akan berosilasi naik turun. Dengan menempatkan suatu sumber cahaya pada massa yang berosilasi, maka geraknya dapat direkam pada suatu keping film peka cahaya yang bergerak pada kecepatan konstan.
Gambar 2 Rekaman Gerak Harmonik Gerakan yang terekam pada film dapat dinyatakan oleh persamaan :
τ
π
tA
x= sin2
Dengan A adalah amplitudo atau simpangan terbesar diukur dari posisi setimbang dan,
τ
adalah periode. Gerak diulang pada t =τ
.Gerak harmonik sering dinyatakan sebagai proyeksi suatu titik yang bergerak melingkar dengan kecepatan konstan terhadap suatu garis lurus seperti ditunjukkan pada gambar 2.14. Dengan kecepatan sudut
garis op sebesar ω, perpindahan simpangan x dapat dituliskan sebagai :
x = A sin ωt
Besaran ω diukur dalam radian per detik dan disebut frekuensi lingkaran. Karena gerak berulang dalam 2π radian, maka didapat hubungan : f
π
τ
π
ω
= 2 =2Kecepatan dan percepatan gerak harmonik dapat diperoleh secara mudah dengan menurunkan persamaan sehingga didapat :
t
A
x
=
ω cos
ω
= ) 2 sin(ω
π
ω
A t+ t A x=−ω
2 sinω
=ω
2A
sin(
ω
t
+
π
)
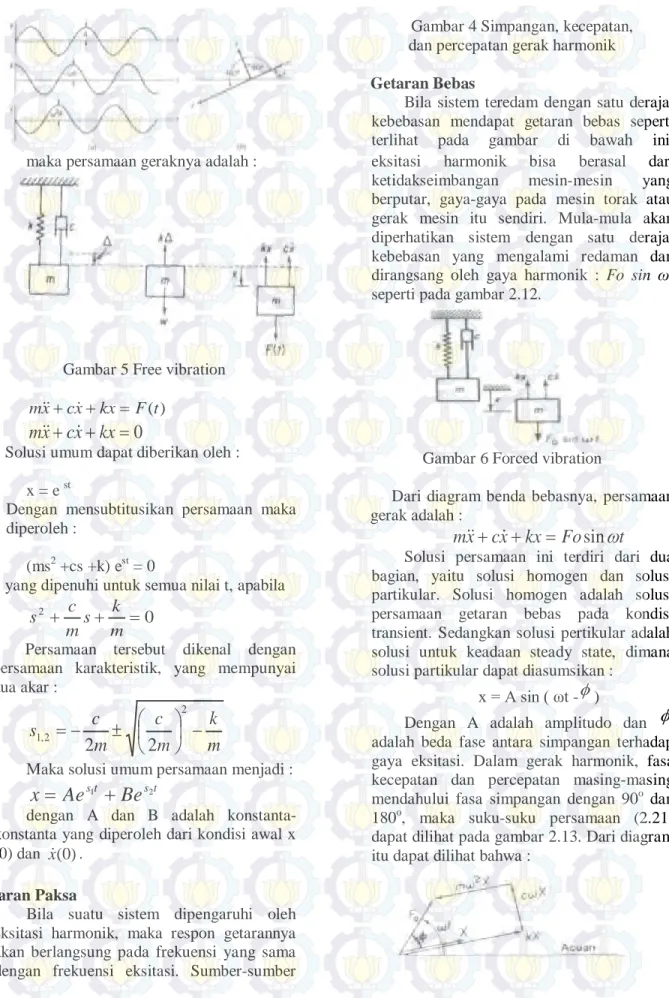
Gambar 3 Proyeksi gerak harmonik pada lingkaran
Dalam gerak harmonik kecepatan dan percepatan juga harmonik dengan frekuensi osilasi yang sama tetapi mendahului simpangan berturut-turut dengan π/2 dan π radian. Dari gambar 2.15, terlihat bahwa pada saat simpangan berharga maksimum dan minimum, kecepatan berharga nol dan saat simpangan berharga nol, maka kecepatan
berharga maksimum dan minimum.Sedangkan pada percepatan, ketika
simpangan berharga maksimum, maka percepatan berharga minimum dan sebaliknya ketika simpangan berharga nol maka percepatan juga berharga nol.
Gambar 4 Simpangan, kecepatan, dan percepatan gerak harmonik Getaran Bebas
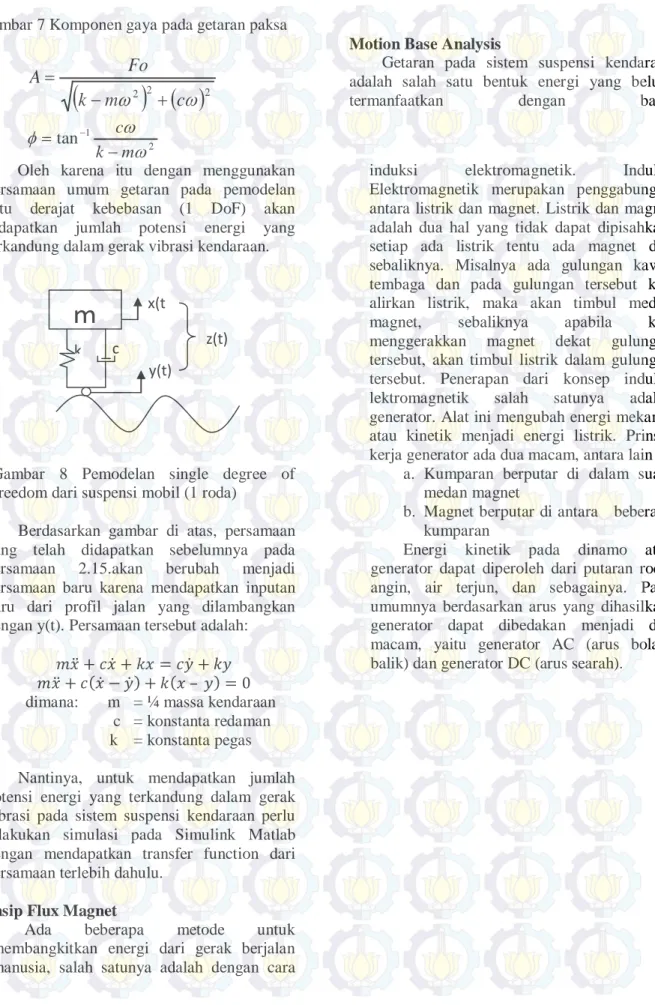
Bila sistem teredam dengan satu derajat kebebasan mendapat getaran bebas seperti terlihat pada gambar di bawah ini, maka persamaan geraknya adalah :
Gambar 5 Free vibration ) (t F kx x c x m+ + =
0
=
+
+
c
x
kx
x
m
Solusi umum dapat diberikan oleh : x = e st
Dengan mensubtitusikan persamaan maka diperoleh :
(ms2 +cs +k) est = 0
yang dipenuhi untuk semua nilai t, apabila 0 2 + + = m k s m c s
Persamaan tersebut dikenal dengan persamaan karakteristik, yang mempunyai dua akar :
m
k
m
c
m
c
s
−
±
−
=
2 2 , 12
2
Maka solusi umum persamaan menjadi :
t s t s
Be
Ae
x
=
1+
2dengan A dan B adalah konstanta-konstanta yang diperoleh dari kondisi awal x (0) dan x(0).
Getaran Paksa
Bila suatu sistem dipengaruhi oleh eksitasi harmonik, maka respon getarannya akan berlangsung pada frekuensi yang sama dengan frekuensi eksitasi. Sumber-sumber
eksitasi harmonik bisa berasal dari ketidakseimbangan mesin-mesin yang berputar, gaya-gaya pada mesin torak atau gerak mesin itu sendiri. Mula-mula akan diperhatikan sistem dengan satu derajat kebebasan yang mengalami redaman dan dirangsang oleh gaya harmonik : Fo sin ωt seperti pada gambar 2.12.
Gambar 6 Forced vibration
Dari diagram benda bebasnya, persamaan gerak adalah :
t
Fo
kx
x
c
x
m
+
+
=
sin
ω
Solusi persamaan ini terdiri dari dua bagian, yaitu solusi homogen dan solusi partikular. Solusi homogen adalah solusi persamaan getaran bebas pada kondisi transient. Sedangkan solusi pertikular adalah solusi untuk keadaan steady state, dimana solusi partikular dapat diasumsikan :
x = A sin ( ωt -
φ
)Dengan A adalah amplitudo dan
φ
adalah beda fase antara simpangan terhadap gaya eksitasi. Dalam gerak harmonik, fasa kecepatan dan percepatan masing-masing mendahului fasa simpangan dengan 90o dan 180o, maka suku-suku persamaan (2.21) dapat dilihat pada gambar 2.13. Dari diagram itu dapat dilihat bahwa :Gambar 7 Komponen gaya pada getaran paksa
(
2)
2( )
2ω
ω
c
m
k
Fo
A
+
−
=
2 1 tanω
ω
φ
m k c − = −Motion Base Analysis
Getaran pada sistem suspensi kendaraan adalah salah satu bentuk energi yang belum
termanfaatkan dengan baik.
Oleh karena itu dengan menggunakan persamaan umum getaran pada pemodelan satu derajat kebebasan (1 DoF) akan didapatkan jumlah potensi energi yang terkandung dalam gerak vibrasi kendaraan.
Gambar 8 Pemodelan single degree of freedom dari suspensi mobil (1 roda)
Berdasarkan gambar di atas, persamaan yang telah didapatkan sebelumnya pada persamaan 2.15.akan berubah menjadi persamaan baru karena mendapatkan inputan baru dari profil jalan yang dilambangkan dengan y(t). Persamaan tersebut adalah:
𝑚𝑥̈ + 𝑐𝑥̇ + 𝑘𝑥 = 𝑐𝑦̇ + 𝑘𝑦 𝑚𝑥̈ + 𝑐(𝑥̇ − 𝑦̇) + 𝑘(𝑥 – 𝑦) = 0 dimana: m = ¼ massa kendaraan
c = konstanta redaman k = konstanta pegas
Nantinya, untuk mendapatkan jumlah potensi energi yang terkandung dalam gerak vibrasi pada sistem suspensi kendaraan perlu dilakukan simulasi pada Simulink Matlab dengan mendapatkan transfer function dari persamaan terlebih dahulu.
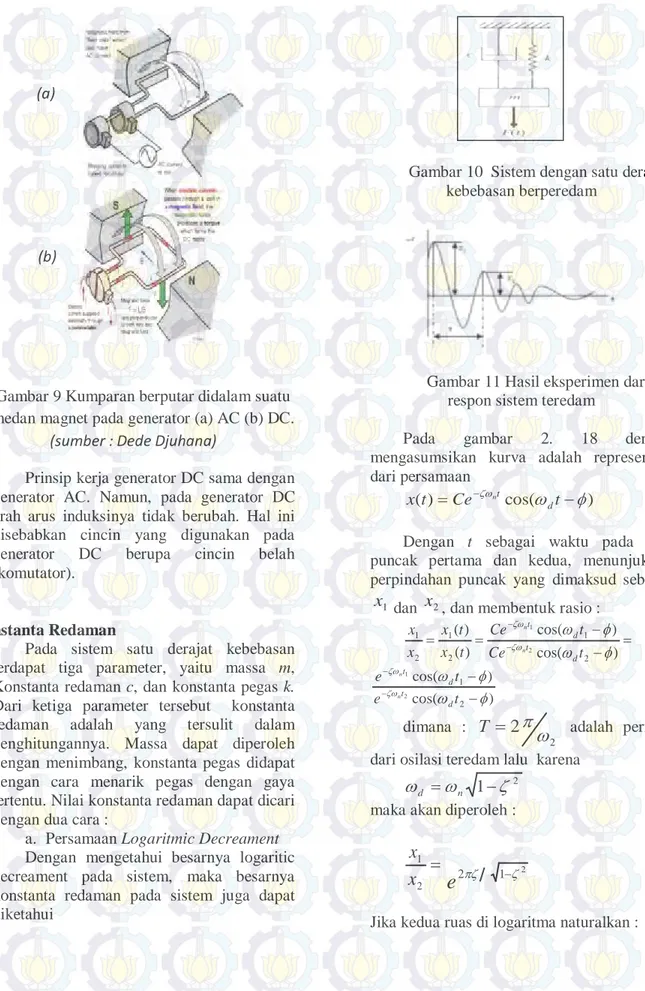
Prinsip Flux Magnet
Ada beberapa metode untuk membangkitkan energi dari gerak berjalan manusia, salah satunya adalah dengan cara
induksi elektromagnetik. Induksi Elektromagnetik merupakan penggabungan antara listrik dan magnet. Listrik dan magnet adalah dua hal yang tidak dapat dipisahkan, setiap ada listrik tentu ada magnet dan sebaliknya. Misalnya ada gulungan kawat tembaga dan pada gulungan tersebut kita alirkan listrik, maka akan timbul medan magnet, sebaliknya apabila kita menggerakkan magnet dekat gulungan tersebut, akan timbul listrik dalam gulungan tersebut. Penerapan dari konsep induksi lektromagnetik salah satunya adalah generator. Alat ini mengubah energi mekanik atau kinetik menjadi energi listrik. Prinsip kerja generator ada dua macam, antara lain :
a. Kumparan berputar di dalam suatu medan magnet
b. Magnet berputar di antara beberapa kumparan
Energi kinetik pada dinamo atau generator dapat diperoleh dari putaran roda, angin, air terjun, dan sebagainya. Pada umumnya berdasarkan arus yang dihasilkan, generator dapat dibedakan menjadi dua macam, yaitu generator AC (arus bolak-balik) dan generator DC (arus searah).
m
x(ty(t)
z(t) k c
Gambar 9 Kumparan berputar didalam suatu medan magnet pada generator (a) AC (b) DC.
(sumber : Dede Djuhana)
Prinsip kerja generator DC sama dengan generator AC. Namun, pada generator DC arah arus induksinya tidak berubah. Hal ini disebabkan cincin yang digunakan pada generator DC berupa cincin belah (komutator).
Konstanta Redaman
Pada sistem satu derajat kebebasan terdapat tiga parameter, yaitu massa m, Konstanta redaman c, dan konstanta pegas k. Dari ketiga parameter tersebut konstanta redaman adalah yang tersulit dalam penghitungannya. Massa dapat diperoleh dengan menimbang, konstanta pegas didapat dengan cara menarik pegas dengan gaya tertentu. Nilai konstanta redaman dapat dicari dengan dua cara :
a. Persamaan Logaritmic Decreament Dengan mengetahui besarnya logaritic decreament pada sistem, maka besarnya konstanta redaman pada sistem juga dapat diketahui
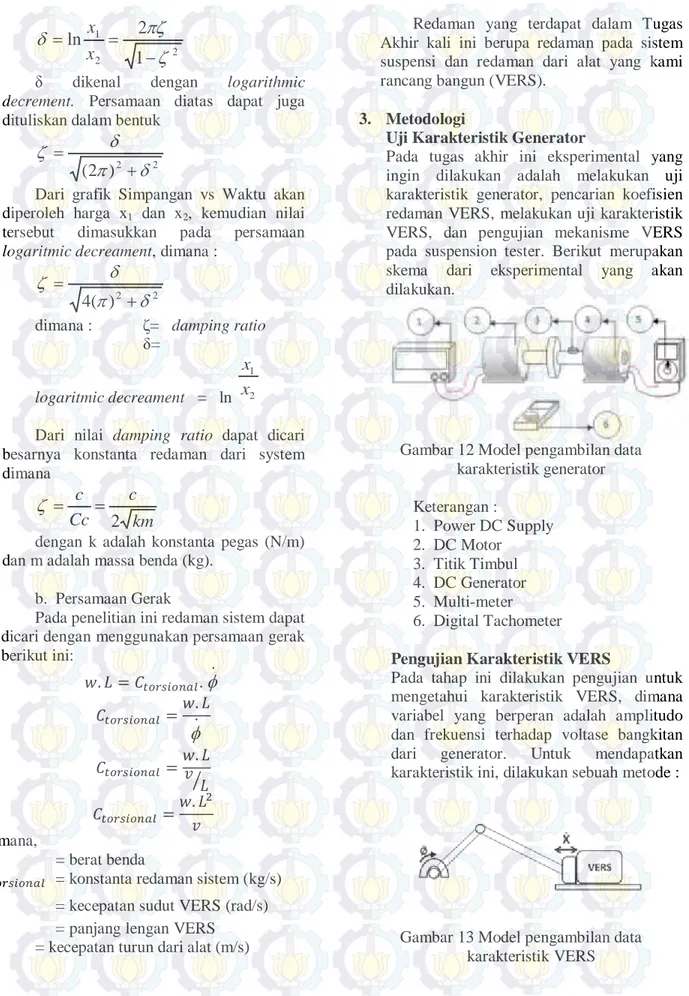
Gambar 10 Sistem dengan satu derajat kebebasan berperedam
Gambar 11 Hasil eksperimen dari respon sistem teredam
Pada gambar 2. 18 dengan mengasumsikan kurva adalah representasi dari persamaan ) cos( ) (t =Ce−ζω
ω
t−φ
x nt dDengan t sebagai waktu pada saat puncak pertama dan kedua, menunjukkan perpindahan puncak yang dimaksud sebagai
1
x dan x2, dan membentuk rasio :
= − − = = −− ) cos( ) cos( ) ( ) ( 2 1 2 1 2 1 2 1 φ ω φ ω ζω ζω t Ce t Ce t x t x x x d t d t n n ) cos( ) cos( 2 1 2 1 φ ω φ ω ζω ζω − − − − t e t e d t d t n n dimana : 2
2
π
ω
=
T
adalah periode dari osilasi teredam lalu karena2 1
ζ
ω
ω
d = n − maka akan diperoleh :=
2 1x
x
2 1 2πζ −ζe
Jika kedua ruas di logaritma naturalkan : (b)
2 2 1
1
2
ln
ζ
πζ
δ
−
=
=
x
x
δ dikenal dengan logarithmic decrement. Persamaan diatas dapat juga dituliskan dalam bentuk
2 2 ) 2 (
π
δ
δ
ζ
+ =Dari grafik Simpangan vs Waktu akan diperoleh harga x1 dan x2, kemudian nilai tersebut dimasukkan pada persamaan logaritmic decreament, dimana :
2 2 ) ( 4
π
δ
δ
ζ
+ =dimana : ζ= damping ratio δ= logaritmic decreament = ln 1 2 x x
Dari nilai damping ratio dapat dicari besarnya konstanta redaman dari system dimana
km
c
Cc
c
2
=
=
ζ
dengan k adalah konstanta pegas (N/m) dan m adalah massa benda (kg).
b. Persamaan Gerak
Pada penelitian ini redaman sistem dapat dicari dengan menggunakan persamaan gerak berikut ini: 𝑤. 𝐿 = 𝐶𝑡𝑜𝑟𝑠𝑖𝑜𝑛𝑎𝑙.
φ
̇ 𝐶𝑡𝑜𝑟𝑠𝑖𝑜𝑛𝑎𝑙 =𝑤. 𝐿φ
̇ 𝐶𝑡𝑜𝑟𝑠𝑖𝑜𝑛𝑎𝑙 =𝑤. 𝐿𝑣 𝐿 � 𝐶𝑡𝑜𝑟𝑠𝑖𝑜𝑛𝑎𝑙 =𝑤. 𝐿 2 𝑣 Dimana, w = berat benda𝐶𝑡𝑜𝑟𝑠𝑖𝑜𝑛𝑎𝑙 = konstanta redaman sistem (kg/s)
φ
̇ = kecepatan sudut VERS (rad/s) L = panjang lengan VERSv = kecepatan turun dari alat (m/s)
Redaman yang terdapat dalam Tugas Akhir kali ini berupa redaman pada sistem suspensi dan redaman dari alat yang kami rancang bangun (VERS).
3. Metodologi
Uji Karakteristik Generator
Pada tugas akhir ini eksperimental yang ingin dilakukan adalah melakukan uji karakteristik generator, pencarian koefisien redaman VERS, melakukan uji karakteristik VERS, dan pengujian mekanisme VERS pada suspension tester. Berikut merupakan skema dari eksperimental yang akan dilakukan.
Gambar 12 Model pengambilan data karakteristik generator Keterangan : 1. Power DC Supply 2. DC Motor 3. Titik Timbul 4. DC Generator 5. Multi-meter 6. Digital Tachometer Pengujian Karakteristik VERS
Pada tahap ini dilakukan pengujian untuk mengetahui karakteristik VERS, dimana variabel yang berperan adalah amplitudo dan frekuensi terhadap voltase bangkitan dari generator. Untuk mendapatkan karakteristik ini, dilakukan sebuah metode :
Gambar 13 Model pengambilan data karakteristik VERS
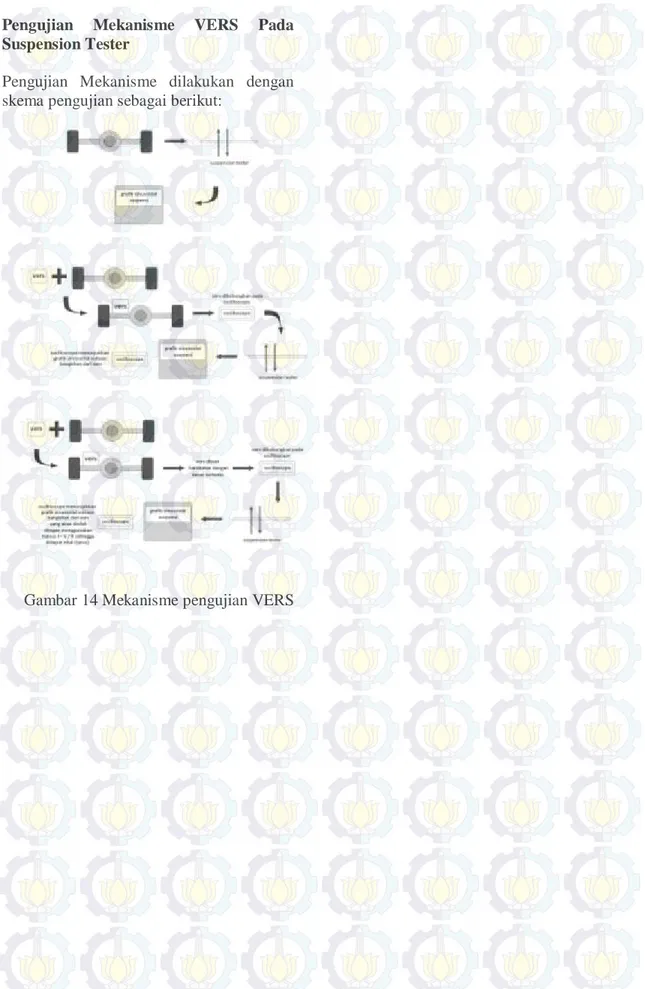
Pengujian Mekanisme VERS Pada Suspension Tester
Pengujian Mekanisme dilakukan dengan skema pengujian sebagai berikut: