(Programmamble Logic Controller)
Diajukan Sebagai Salah Satu Syarat Dalam Meraih Gelar Sarjana Teknik ( S-1 ) Pada Fakultas Teknologi Industri Jurusan Teknik Mesin Universitas Mercu Buana
Disusun oleh :
Nama : Firman Febyansyah Nim : 01300 - 051
Jurusan : Teknik Mesin
FAKULATAS TEKNOLOGI INDUSTRI
UNIVERSITAS MERCU BUANA
JAKARTA
2007
LEMBAR PEMGESAHAN
RANCANGAN SISTEM PNEUMATIK PADA MESIN BOR
PNEUMATIK BERBASIS PLC
(Programmamble Logic Controller)
Diajukan Sebagai Salah Satu Syarat Dalam Meraih Gelar Sarjana Teknik ( S-1 ) Pada Fakultas Teknologi Industri
Jurusan Teknik Mesin Universitas Mercu Buana
Disetujui dan Diterima Oleh :
Pembimbing I
(Dr, H. Abdul Hamid. M.eng)
Pembimbing II
(Prof. Ir, Djoko W, Karmiadji. MSME,Ph,D)
UNIVERSITAS MERCU BUANA
-LEMBAR PEMGESAHAN
RANCANGAN SISTEM PNEUMATIK PADA MESIN BOR
PNEUMATIK BERBASIS PLC
(Programmamble Logic Controller)
Diajukan Sebagai Salah Satu Syarat Dalam Meraih Gelar Sarjana Teknik ( S-1 ) Pada Fakultas Teknologi Industri
Jurusan Teknik Mesin Universitas Mercu Buana
Disetujui dan Diterima Oleh :
Koordinator Tugas Akhir
(Nanang Ruhiyat. 1r)
Ketua Jurusan Teknik Mesin
JURUSAN TEKNIK MESIN
FAKULTAS TEKONOLOGI INDUSTRI UNIVERSITAS MERCU BUANA
JAKARTA
LEMBAR PERNYATAAN
Saya yang bertanda tangan dibawah ini : Nama : Firman Febyansyah Nim : 01300 - 051
Jurusan : Teknik Mesin Fakultas : Tenologi Industri
Menyatakan dengan ini sesungguhnya bahwa Tugas Akhir yang saya buat dan susun ini merupakan hasil pemikiran serta karya saya seorang. Tugas Akhir ini tidak dibuat oleh pihak lain baik alat maupun skripsi dari alat itu sendiri, kecuali kutipan-kutipan referensi yang telah disebutkan sumbernya.
Jakarta, Agustus 2007
Firman Febyansyah
UNIVERSITAS MERCU BUANA
-KATA PENGANTAR
Assalamu’alaikum Wr.Wb
Alhamdulillah puji dan syukur penulis panjatkan kehadirat Allah SWT yang telah memberikan taufik dan hidayah sehingga penulis dapat menyelesaikan penulisan Tugas Akhir ini tepat pada waktunya.
Penulisan tugas akhir ini adalah untuk memenuhi kurikulum jurusan Teknik Mesin Fakultas Teknologi Industri Universitas Mercu Buana yang diwajibkan kepada. setiap Mahasiswa Teknik Mesin. Penulisan dan penyusunan Tugas Akhir ini juga merupakan salah satu syarat untuk mendapatkan gelar Strata Satu. (S-1).
Penulis melakukan Tugas Akhir dengan judul " Rancangan Sistem Pneumatik Pada Mesin Bor Pneumatik". Bahasan yang diambil secara umum meliputi komponen - komponen alat tersebut serta teori dasar tentang alat itu sendiri. Pada kesempatan ini penulis mengucapkan terima kasih dan penhargaan yang sebesar - besarnya yang diajukan kepada
1. Bpk. Ir. Yuriadi Kusuma Msc, selaku Dekan Fakultas Teknologi Industri Universitas Mercu Buana.
2. Bpk. Dr. H. Abdul Hamid, M.eng, Selaku Dosen pembimbing Tugas akhir
3. Bpk. Ir. Rully Nutranta, M.eng Selaku Ketua Jurusan Teknik Mesin Universitas Mercu Buana.
4. Bpk. Nanag Ruhiat, ST selaku Koordinator Tugas Akhir.
5. Bapak dan Mama yang selalu memberikan bantuan baik spiritual maupun materiil ( Pak, Ma Makasih ya ... !!)
6. Bang Iwan yang telah banyak membantu baik saran dan tenaganya untuk pembutan alat dan penulisan Tugas Akhir ini.
7. Om dan Tante Andi yang selalu memberikan dorongan kepada penulis. 8. Andika Rayanti orang spesial yang selalu menyupot dan setia menemani. 9. Haryadi, ST, M. Nur, ST, kimung, tanpa kalian penulis ga bakal bisa
secepat ini selesaiin Tugas Akhir ini.
10. Rekan - rekan Mahasiswa Jurusan Teknik Mesin yang secara langsung maupun tidak langsung telah memberikan panduan dan bantuan dalam penyusunan Tugas Akhir ini.
Semoga amalan ibadah dan amalan yang telah diberikan tersebut mendapat pahala yang setimpal dan Allah SWT. Penulis menyadari kendati telah diupayakan sedemikian rupa tentunya masih banyak terdapat kekurangan dan kesalah- kesalahan yang melekat pada penulisan Tugas Akhir ini. Meskipun demikian semoga Tugas Akhir ini para pembaca khususnya rekan-rekan Mahasiswa Teknik Mesin Fakultas Teknologi Industri Universitas Mercu Buana. Wassalamualaikum Wr.Wb
Jakarta, Agustus 2007
Penulis
UNIVERSITAS MERCU BUANA
-DAFTAR ISI
HALAMAN JUDUL... i
LEMBAR PENGESAHAN... ii
LEMBAR PERNYATAAN... iv
KATA PENGANTAR... v
DAFTAR ISI... vii
DAFTAR GAMBAR ... x
DAFTAR NOTASI... xii
ABSTRAK ... xiii BAB I PENDAHULUAN 1.1. Latar Belakang ... 1 1.2. Tujuan Perancangan ... 2 1.3. Pembatasan Masalah ... 2 1.4. Metode Penulisan ... 2 1.5. Sistematika Penulisan... 3
BAB II TEORI DASAR 2.1. Pengertian dan Pembagian Pneumatik ... 5
2 2. Hukum-hukum dasar Pneumatik ... 7
i. Hukum Pascal... 8
ii Hukum Boyle ... 10
iii. Hukum Bernouli ... 10
2.4. Pengaturan Logika Pneumatik ... 12
i. Rangkaian AND ... 13
ii. Rangkaian OR ... 13
iii. Rangkaian NOT... 14
iv. Rangkaian Memori ... 15
2.5. Komponen Pneumatik ... 16
i. Silinder ... 16
ii. Katup ... 18
2.6. Keuntungan Penggunaan Pneumatik ... 22
2.7. Kerugian Menggunakan Pneumatik ... 26
BAB III PROSES PEMBUATAN ALAT DAN PERANCANGAN ALAT 3.1. Kerangka Utama ... 28
3.2. Box Panel... 29
3.3. Perakitan Alat ... 30
3.4. Perlakuan Pengelasan ... 30
3.5. Perlakuan Pengeboran ... 31
3.6. Pemasangan Mur dan Baut... 32
3.7. Komponen-komponen Utama Mesin Bor ... 33
i. PLC... 35
ii Prinsip Kerja PLC ... 36
iii Mata Bor... 36
3.8. Pneumatik ... 41
3.9. Selang ... 42
UNIVERSITAS MERCU BUANA
-3.10.Distribusi Udara ... 43
i. Katup Kontrol ... 44
ii Togel ... 44
iii Nepel ... 45
iv Katup Kontrol Kecepatan (Adjustable Throttle Valve) ... 46
3.11. Perancangan Sistem... 47
BAB IV PERHITUNGAN 4.1. Proses Pneumatik... 50
i Kompresor ... 50
ii Valve ... 51
iii Silinder Ganda ... 51
4.2. Data Teknik yang Diperlukan Dalam Perhitungan ... 51
4.3. Analisa dan Pengolaban Data... 52
i Perhitungan pada Silinder I ... 53
ii Perhitungan pada Silinder II & III... 55
BAB V PENUTUP 5.1. Kesimpulan ... 58
5.2. Saran ... 59
DAFTAR PUSTAKA LAMPIRAN
DAFTAR GAMBAR
Gambar 2.1 Hukum paskal ... 9
Gambar 2.2 Hukum boyle ... 10
Gambar 2.3 Sistem pneumatik sederhana ... 12
Gambar 2.4 Rangkaian logika AND ... 13
Gambar 2.5 Rangkaian logika OR ... 14
Gambar 2.6 Rangkaian logika NOT ... 14
Gambar 2.7 Rangkaian logika memori tak terbatas ... 15
Gambar 2.8 Silinder gerak tunggal ... 16
Gambar 2.9 Silinder gerak ganda ... 17
Gambar 2.10 Katup tiga lubang ... 19
Gambar 2.11 Katup lima lubang ... 21
Gambar 3.1 Perlakuaan pengelasan ... 31
Gambar 3.2 Pemasangan mur dan baut ... 32
Gambar 3.3 Prinsip kerja PLC secara sederhana ... 35
Gambar 3.4 Sensor photoelektrik retroreflektif ... 38
Gambar 3.5 Sensor photoelektrik ganda ... 38
Gambar 3.6 Penampang selanoid ... 39
Gambar 3.7 Silinder kerja ganda ... 42
Gambar 3.8 Selang penomatik ... 43
Gambar 3.9 Katup kontrol ... 44
Gambar 3.10 Katup togel ... 45
UNIVERSITAS MERCU BUANA
-Gambar 3.11 Nepel ... 46 Gambar 3.12 Katup kontrol kecepatan ... 46 Gambar 3.13 Perancangan sistem Pneumatik ... 48
DAFTAR NOTASI
Simbol Besaran Satuan
A Luas penampang m2 D Diagram dalam m ƒ Aliran turbulain g gaya gravitasi m/s hƒ Head loss m L langkah keja m
Pc Daya kompresor Watt
p Tekanan maksimum N/m2
P Pressure loss N/m2
T Tekanan udara Oc
V Kecepatan alir fluida m/s
Re Bilangan reynold.
ρ Masa jenis kg/m2
γ Berat jenis N/m3
UNIVERSITAS MERCU BUANA
-ABSTRAK
Dengan mengunakan ajas Bernouli, dalam tugas akhir, ini penulis merancang bangun sebuah alat mesin bor pneumatik berbasis PLC, Yang dilengkapi dengan sensor untuk menditeksi objek benda kerja. Berdasarkan dari analisa studi diatas dapat ditarik hasil-hasil perhitungan Sebagai berikut:
A. pada silinder I
1. Bilangan Reynold, (Rc) = 30,254 103
2. Head loss (hƒ) = 0,022 m
3. Kecepatan Fluida, (v) = 38,05 m/s
B. pada silinder II dan III
1. Bilangan Reynold, (Rc) = 30,254. 103
2. Head loss (hƒ) = 0,022 m.
BAB I PENDAHULUAN
1.1. Latar Belakang
Perkembangan ilmu pengetahuan dan teknologi, telah mendorong manusia untuk memanfaatkannya dalam kehidupan sehari-hari di segala bidang untuk memperoleh kemudahan atau menambah kenyamanan dan keamanan dalam melakukan tugas atau pekerjaan.
Di jaman yang serba modern dan teknologi yang semakin canggih, maka diperlukan suatu alat penunjang yang memenuhi segala kriteria yang dibutuhkan oleh pasar sehingga alat tersebut akan berguna dan berfungsi dengan baik di pasaran.
Dengan melihat kondisi negara kita. yang sangat jauh terfingal dibidang teknologi maka kita hendaknya memaksimalkan potensi yang ada untuk mengejar segala ketertinggalan khususnya dibidang teknologi maka penulis berinisiatif
- 1 - UNIVERSITAS MERCU BUANA
membuat alat mesin bor dengan sistem pnuematik. Dimana material yang, akan dibor dengan menggunakan mesin bor pneumatik ini hasilnya sempurna. Dengan tujuan seperti yang disebutkan di atas yaitu mepermudah dan memberikan kenyaman serta keamanan bagi para konsumen.
1.2 Tujuan Perancangan
Tujuan perancangan mesin bor pneumatik ini lebih menjamin hasil material yang dibor lebih akurat dibandingkan mesin bor manual dan meningkatkan efisiensi waktu karena dengan pengeboran menggunakan alat ini lebih cepat dibandingkan dengan yang manual dan memperbanyak hasil material yang didapat.
1.3 Pembatasan Masalah
Dalam penulisan tugas akhir ini akan dibatasi pada sistem pneumatik yang akan digunakan untuk pembuatan mesin bor dengan sistem pneumatik dengan tidak merencanakan suatu pemasang secara keseluruhan dengan asumsi bahwa mekanisme mesin bor yang ada ini sudah cukup memadai.
1.4 Metode Penulisan
Metode penulisan yang digunakan oleh penulis dalam penyusunan tugas akhir ini dilakukan dengan dua metode yaitu
A. Metode Penulisan
1. Penelitian kepustakaan 2. Penelitian lapangan 3. Diskusi
B. Metode Perhitungan
Dengan mengacu pada data-data dari hasil perhitungan dan pengamatan langsung di lapangan sebagai dasar perhitungan yang tidak lepas dari pembatasan masalah.
1.5 Sistematika Penulisan
Dalam tugas akhir ini disusun beberapa bab, sedemikian rupa sehingga dapat dengan mudah dimengerti dan mencapai target yang diharapkan, adapun penyusunannya sebagai berikut :
BAB I PENDAHULUAN
Berisikan latar belakang, tujuan penulisan dan penelitian, pembatasan masalah, metode penulisan dan sistematika penulisan.
BAB II TEORI DASAR
Berisi tentang penjelasan teori pneumatik latar belakang masalah, perumusan masalah, tujuan perancangan, pembatasan masalah dan sistematika penelitian.
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
BAB III PERANCANGAN
Berisi tentang perancangan alat, dan komponen-komponen utama digunakan dalam mesin bor ini.
BAB IV PERHITUNGAN
Berisikan perhitungan dari masing-masing komponen dalam mesin bor yang telah dirancang.
BAB V PENUTUP
Berisikan tentang kesimpulan - kesimpulan dan saran-saran dari hasil perhitungan dan perancangan dengan untuk kerja alat.
DAFTAR PUSTAKA
BAB II TEORI DASAR
2.1 Pengertian dan Pembagian Pneumatik
Kata pneumatik berasal dari bahasa “pneu” yang berarti napas atau udara dan kata “matik” yang berarti gerakan. Jadi pneumatik adalah udara mampat yang dapat digerakan sehingga menghasilkan suatu sistem kerja, sedangkan dalam pengertian teknik pneumatik adalah alat penggerak, pengendali, pengatur, penghubung, dan perentangan yang mengambil gaya dan penggerakannya udara mampat.
Pneumatik merupakan salah satu cabang dari teori Aliran atau Mekanika Fluida yang menitik beratkan perhatiannya pada aliran udara melalai saluran-saluran seperti : pipa, selang dan sebagainya serta aksi dan penggunaan udara mampat. Udara yang digunakan dalam pneumatik adalah udara yang ada disekitar kita, dalam prakteknya udara yang digerakan harus dimampatkan dahulu sebelum
- 5 - UNIVERSITAS MERCU BUANA
dipindahkan ke dalam ruang tempat yang relatif berukuran lebih kecil sehingga menghasilkan udara mampat yang dapat berkerja pada suatu sistem pneumatik.
Jadi pada dasarnya pneumatik merupakan suatu hal yang membahas mengenai udara yang bergerak. Keadaan dan syarat keseimbangan udara pada perkembangan industri, udara dihisap dengan menggunakan pompa. khusus yang disebut kompresor dan di mampatkan dari tekanan normal (0,98 bar) sampai tekanan lebih tinggi (8-15 bar) masuk kedalam sebuah rangkaian pneumatik. Udara mampat digunakan dengan cara mengalirkan udara yang bertekanan tersebut melalui rangkaian untuk menggerakan aktuator.
Jika motor kompresor yang dipakai menggunakan tenaga listrik maka tenaga yang dihasilkan adalah tenaga listrik. Adapun hal-hal yang harus diperhatikan dalam konstruksi teknik pneumatik adalah :
1. Perkembangan kecepatan melalui penampang pipajalan.
2. Pengaruh panjang dan kekasaran dingin pipa atas hambatan aliran gas. 3. Mengurangi hambatan aliran gas pada suatu benda secara garis besar
pembagian pneumatik adalah sebagai berikut :
¾ Adapun pembagian teknis.
a. Pneumatik adalah penyerahan gaya dan energi mekanik seperti : mesin produksi dan peralatan pengangkutan.
b. Pneumatik kendali dan penyatuan adalah teknik pengolahan sinyal dan data seperti : pengerjaan cermat dengan menggunakan PLC.
¾ Menurut tenaga kerja.
a. Tekanan yang sangat rendah ( 1,001-1,1 bar)
b. Tekanan rendah ( 1,2-2 bar)
c. Tekanan tinggi ( 2-8 bar)
d. Tekanan sangat tinggi ( 8-15 bar)
¾ Menurut bidang penggunaan.
a. Penyerahan kerja gaya dan kerja mekanik 1. Pergerakan kerja gaya dan kerja mekanik 2. Menyetel dan menempatkan seperti rem. b. Pengangkutan, seperti : pesawat angkat. c. Pengolahan sinyal dan pengolahan data.
1. Elemen pemasuk dan keluar data, seperti: alat penunjuk dan pencatat pada PLC
2. Elemen pengolah data, seperti: tabung hitung analog. 3. Elemen pengut, seperti: Pengut sinya
2.2 Hukum-hukum dasar pneumatik
Pada pneumatik penerapan hukum dasar yang digunakan adalah hukum fisika khususnya mengenai udara yang bertekanan. Dibawah ini adalah beberapa hukum dasar yang digunakan dalam pneumatik, yaitu :
1. Hukum Paskal 2. Hukum Boyle 3. Hukum Bernouli
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
[ i ] Hukum Pascal.
Pascal dari Perancis menjelaskan bahwa tekanan yang diberikan pada suatu penampang fluida statis yang berada pada bejana tertutup akan diteruskan kesemua bagian fluida tersebut. Hal ini berlaku juga, jika fluida berupa udara yang bertekanan. Hukum yang dikemukakan ini dikenal sebagai hukum pascal mengenai perpindahan tekanan statis
Adapun hukum pascal dapat dihitung dengan menggunakan rumus: Persamaan Pascal F = P X A ... ( 1 )
Keterangan :
F = Gaya yang berkerja = N
P = Tekanan = N/m2
A = Luas permukaan yang menerima gaya beban = m 2
Bila sebuah piston terdapat luas A dan pada piston lain terdapat luas A2
maka pada bagian piston dengan luas A1, akan menghasilkan gaya Fl, sedangkan
pada piston dengan luas A2, akan menghasilkan gaya F2 persamaan dari kalimat
ini adalah : 1 2 1 2 A XF F P = atau A F A F P 1 1 2 = = ... (2) Keterangan :
P = Tekanan yang diteruskan oleh fluida bertekanan : N/m2
F1 = Gaya pada bidang 1 : N
A1 = Luas penampang bidang 1 : m 2
A2 = Luas penampang bidang 2 : m2
Pada gambar 2.2.1.A Luas penampang, A1, Lebih kecil dari pada luas
penampang A2, demikian juga gaya yang dihasilkan Fl, lebih kecil dari pada yang
dihasilkan F2.
Gambar 1. Hukum Pascal
Pada gambar 2.2.1.13 adalah tekanan udara yang berasal dari kompresor masuk ke dalam pipa penyambung pada piston A2, akan bergerak. Hal ini
merupakan prinsip pergerakan silinder pneumatik. Setelah mengetahui beberapa tekanan udara yang diperlukan pada penggunaan silinder berdiameter tertentu maka dapat diketahui beberapa gaya dorong yang dihasilkan dengan menggunakan rumus pascal.
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
[ ii ] Hukum Boyle
R boyle. (1627 - 1691) di Inggris menjelaskan bahwa “Pada keadaan temperatur yang konstan, tekanan pada gas berbanding lurus dengan volumenya”. Adapun hukum Boyle dapat dihitung dengan menggunakan rumus persamaan Boyle (konstan). ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = 2 1 1 2 V V x P P atau ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ = 2 1 1 2 P V x P V ... ( 3 ) Keterangan :
P1 = Tekanan absolut awal : Pa atau N/m2
P2 = Tekanan absolut akhir : Pa atau N/m2
V1 = Volume awal : m3
V2 = Volume akhir : m3
Gambar 2. Hukum Boyle
[ iii ] Hukum Bernouli
Persamaan Bernouli untuk fluida alir.
g g 2 p z 2 2 p z 2 1 2 1 1 1 υ υ + ∂ + = + ∂ + ... (4)
2.3 Sistem Pneumatik
Sistem pneumatik atau. suatu sistem yang memampatkan udara yang di mampatkan yang diambil dari sekitarnya, kemudian udara mampat tersebut digunakan untuk menghasilkan suatu kerja atau tenaga. Hal ini dimungkinkan karena udara menyimpan hampir seluruh tenaga. yang digunakan untuk memampatkannya atau memasukannya secara paksa
Dalam bidang industri pneumatik digunakan dalam berbagai ragam peralatan. dengan berbagai variasi tekanan udara sesuai dengan kebutuhan. kontruksi pabrik. Dalam kehidupan sehari-hari pneumatik banyak kita jumpai pada bengkel-bengkel kendaraan seperti untuk pengeboran atau pelepasan mur roda, serta penyemprot cat, selain itu juga dapat kita lihat pada rem kendaraan sistem suspensi kendaraan dan sebagainya.
Komponen pneumatik biasanya digunakan dalam sistem otomatisasi dan pada berbagai proses produksi dalam suatu industri. Komponen tersebut memungkinkan dilakukannya otomatisasi pada proses produksi seperti pengolahan bahan, pembuatan komponen mesin, pemasangan dan pengepakan disamping itu proses produksi yang dilaksanakan secara manual pun sering menggunakan peralatan pneumatik untuk sistem kontrol dan keselamatan kerja.
Pada sistem pneumatik mutlak dibutuhkan alat atau mesin untuk mendapatkan udara atau gas yang dikompresor. Kompresor tersebut mengisap udara dari atmosfir, Kemudian dimampatkan dan. disimpan dalam tabung atau tangki udara untuk penggunaan selanjutnya. Apabila kompresor digunakan untuk mengisap udara atau gas untuk menghasilkan tekanan yang lebih tinggi dari
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
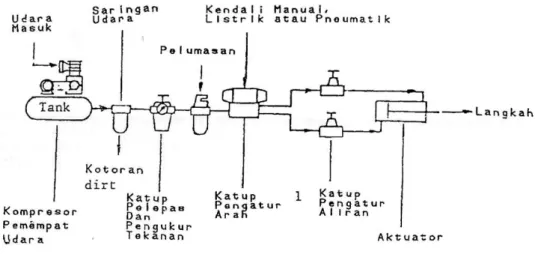
tekanan atmosfir, disebut kompresor penguat ( booster ) sedangkan yang bekerja sebaliknya disebut vakum. Sistem pneumatik sederhana terdiri dari kompresor, katup pneumatik serta tabung pneumatik atau aktuator seperti diagram berikut :
Gambar 3. Sistem Penumatik Sederhana
2.4 Pengaturan Logika Penumatik
Sistem pengaturan logika pneumatik menggunakan udara dan fungsi logika untuk mengendalikan kerja pneumatik atau sistem tenaga fluida lainnya. Sistem logika ini banyak dipakai karena dapat dioperasikan pada beberapa tingkatan sesuai dengan keperluan.
Sistem logika ini sebenarnya sudah lama digunakan dalam industri, tapi sistem pengaturan logika dengan pneumatik kini mulai digunakan dengan beberapa keuntungan dibanding dengan menggunakan sirkuit elektronik. Pada sirkuit elektronik mudah terjadi kerusakan akibat beban listrik yang melebihi tahanannya, panas dan lain-lain.
Pada dasamya secara umum sistem pengaturan logika pneumatik terdiri atas rangkaian DAN (AND), ATAU (OR), TIDAK (NOT), MEMORI, TIME, serta gabungan dari rangkaian tadi.
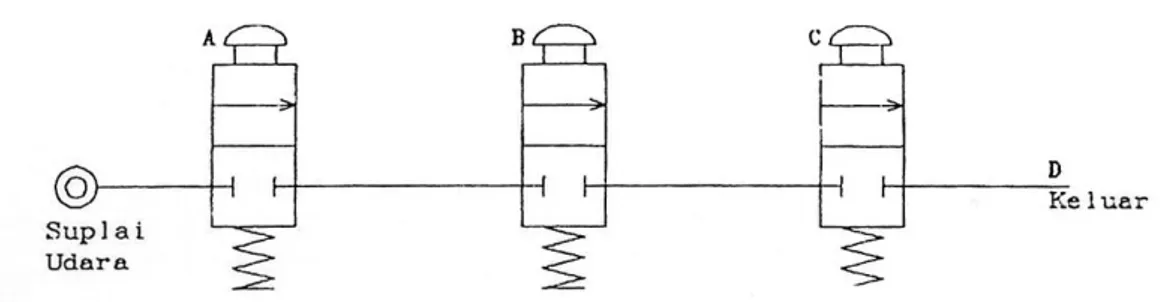
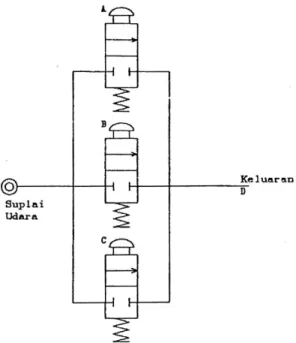
[ i ] Rangkaian AND
Dalam rangkaian AND atau DAN ini, kita misalkan ada beberapa masukan melalui katup A, B dan C yang dipasang secara seri untuk memberikan keluaran D Bila masukan hanya ada A atau B atau C saja maka keluarannya tidak ada, artinya keluaran hanya akan dihasilkan bila A dan B dan C ada masukan.
Gambar 4. Rangkaian Logika AND
[ ii ] Rangkaian OR
Yang dimaksud dengan rangkaian OR adalah bila ada masukan baik itu dari A atau dari B atau dari C maka akan menghasilkan keluaran D.
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
Gambar 5. Rangkaian logika OR
[ iii ] Rangkaian NOT
Rangkaian NOT dapat dilihat pada gambar berikut, keluaran C tidak ada jika katup A atau B atau keduanya diberikan pada posisi on, tetapi keluaran C akan ada j ika katup dalam posisi tidak ditekan atau off.
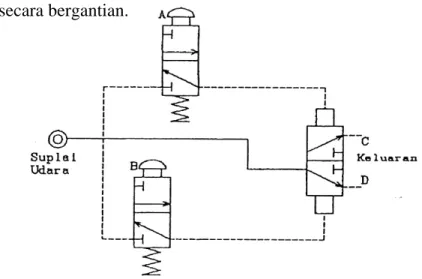
[ iv ] Rangkaian Memori
Rangkaian Memori adalah kemampuan dari pada rangkaian untuk menahan penyimpangan. Maksudnya adalah, rangkaian akan berada pada satu posisi atau keadaan hingga diberikan isyarat pengendali untuk mengembalikan pada keadaannya semula. Pada memori tak terbatas, perintah dari isyarat pengendali menyebabkan rangkaian berubah pada satu keadaan dan kembali ke keadaan semula bila isyarat yang berlawanan diberikan.
Pada Memori terbatas, isyarat yang diberikan akan memberikan pada suatu keadaan kemudian akan mengembalikannya pada keadaan semula secara otomatis setelah selang beberapa saat.
Rangkaian Memori tak terbatas dapat dilihat pada gambar 2.4.4, yang mana rangkaian memiliki dua buah keluaran yaitu C dan D sedangkan pengaturan isyarat pemandu dilakukan dari A dan B. Apabila tombol A ditekan maka keluaran akan melalui C dan bila katup B ditekan maka keluaran akan melalui D. Dengan rangkaian ini dapat memberikan rangkaian bolak balik dengan menekan kedua tombol secara bergantian.
Gambar 7. Rangkaian Logika Memori Tak Terbatas
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
Rangkian memori terbatas sebenarnya hampir sama fungsinya dengan rangkaian time yang berfungsi sebagai rangkaian penunda waktu.
2.5 Komponen Pneumatik
Komponen pneumatik yang penting adalah katup ( valve) dan tabung (Cylinder) pneumatik. Katup berfungsi untuk mengontrol gerak tabung atau silinder pneumatik. Silinder pneumatik berfungsi untuk menghasilkan gaya serta gerak linier untuk melakukan suatu kerja.
[ i ] Sifinder
Silinder pneumatik dapat dibedakan atas silinder gerak tunggal dan silinder gerak ganda. Pada silinder gerak tunggal udara mampat dimasukan pada salah satu sisi torak dari silinder, sedangkan pada sisi lain ditahan oleh pegas untuk mengembalikan ke posisi semula bila udara mampat dilepaskan kembali ke udara. Silinder gerak tunggal umumnya digunakan untuk perkerjaan-pekerjaan ringan yang tidak membutuhkan gaya serta gerak linier yang besar.
Pada silinder gerak ganda terdapat lubang penghubung pada kedua sisinya. Bila udara mampat dimasukan melalui lubang bagian belakang, maka torak akan bergerak positif sedangkan udara pada bagian muka maka torak akan bergerak negatif dan udara pada bagian belakang torak di buang melalui lubang bagian belakang. Dengan demikian akan diperoleh gerak bolak-balik yang dapat diatur.
Gambar 9. Silinder Gerak Ganda
Besarnya gaya yang diteruskan ke batang torak adalah besarnya tekanan (Newton per meter persegi) dikalikan luas penampang torak ( meter ), atau dapat dituliskan sebagai berikut :
F = P X A
Dimana luas penampang torak adalah A = π x r2
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
Dengan F = Gaya ( Newton )
P = Tekanan (Newton/m2)
A = Luas permukaan torak (m2) r = j ari -jari torak (m)
[ ii ] Katup
Dalam sistem pneumatik udara mampat yang dimasukan ke dalam silinder harus dapat dikeluarkan kembali untuk dapat mengembalikan pada kedudukan semula. Untuk itu dalam sistem pneumatik ini dibutuhkan katup yang dapat berkerja bolak-balik, dengan kata lain katup dalam sistem ini berfungsi untuk mengatur masuk dan keluarnya udara mampat ke dan dari silinder.
Jenis katup yang digunakan ada beberapa jenis dengan tombol pengoperasian katup yang berbeda pula sesuai dengan pemakaiannya dalam suatu sistem, adapun jenis katup yang biasa digunakan :
1. Katup Tiga Lubang 2. Katup Lima Lubang 3. Katup Peka Tekanan 4. Katup Selenoid
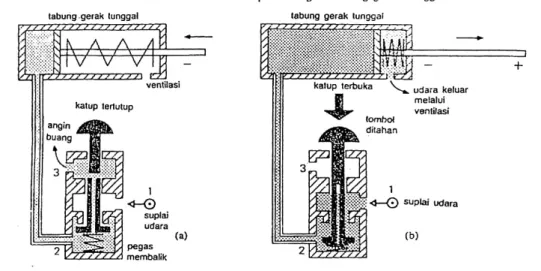
[ i ] Katup Tiga Lubang
Katup ini biasanya digunakan pada tabung silinder dengan gerak tunggal, dimana udara mampat hanya dimasukan pada salah satu sisinya. Katup ini terdiri dari tiga lubang masing-masing sebuah lubang menerima, suplai udara mampat,
sebuah lubang untuk dihubungkan ke silinder serta sebuah lubang ke tiga untuk tempat lewatnya udara dad dalam tabung ke udara bebas bila katup tertutup. Dalam menggambrnaya untuk memudahkan membedakan ketiga lubang tadi digunakan simbol sebagai berikut :
Simbol untuk suplai udara mampat Simbol untuk udara keluar ( exhaust air ) Simbol untuk hubungan dengan tabung
Detail dari katup tiga lubang dapat diterangkan sebagai berikut, bila katup tombol ditekan maka torak kecil akan bergerak ke bawah sehingga memungkin kan udara mencalir dari lubang 1 dan keluar dari lubang 2, kemudian jika tombol dilepas kembali pegas akan mendorong kembali torak kecil dan menutup suplai udara dari lubang 1. Torak kecil ini bagian dalamnya berlubang, sehingga angin buang biasa lewat dan keluar melalui lubang 3.
Gambar 10. Katup tiga lubang [ ii ] Katup Lima Lubang
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
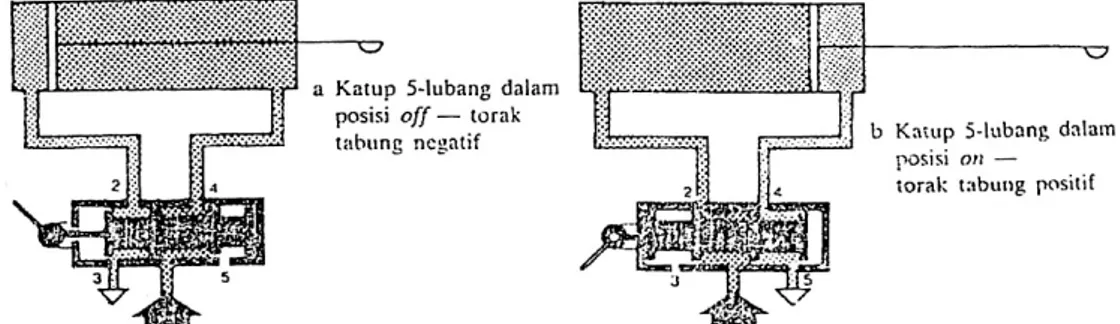
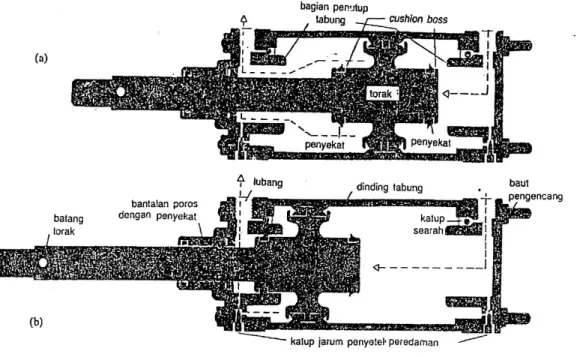
Pada silinder gerak ganda jarang dikontrol menggunakan katup tiga lubang, untuk itu digunakan katup lima lubang yang pada hakekatnya sama dengan dua buah katup tiga lubang yang digabung menjadi satu.
Untuk menggambarkan detail dari katup ini kita ambil contoh katup lima lubang dengan mekanisme tuas atau lever yang memiliki mekanisme penyekat berupa sebuah poppet yaitu semacam tabung dengan sebuah piringan kecil dibagian bawahnya yang berlapis cincin karet. Mekanisme penyekat ini memiliki sebuah spool, yaitu semacam tabung yang terbuat dari logam paduan yang ringan dan empat buah cincin keret penyekat yang melilit pada spool dengan selang yang teratur. Tuas digunakan untuk mengatur posisi spool. Tuas pengatur dapat juga berupa mekanisme tombol tekan, roda serta plunger.
Bila tuas dalam posisi on, maka udara masuk ke dalam katup melalui lubang 1, kemudian meninggalkan katup dari lubang 2 ke silinder, akibatnya torak silinder bergerak positif Sementara udara yang terdorong dari torak keluar dari silinder dan masuk kelubang 4 kemudian dibuang melalui lubang 5. Bila tuas digeser keposisi off maka spool juga akan bergeser sehingga udara mampat masuk dari 1 dan diteruskan kelubang 4 sehingga torak silinder bergerak negatif Udara yang terdorong oleh torak keluar dari lubang 2 dan dibuang melalui lubang 3.
Gambar 11. Katup Lima lubang
[ iii ] Katup Peka Tekanan
Katup ini dioperasikan dengan menggunakan sebuah diafragma dari karet serta pegas untuk pembalik. Cara kerja katup ini hampir sama dengan katup lima lubang, namun mekanisme untuk menggerakan spool melalui difragma serta pegas pembalik . Bila udara bertekanan yang meskipun redah diberikan pada lubang dimana diafragma berbeda, maka melalui lubang 1, jika diafragma kembali keposisi semula maka suplai udara utama akan melalui lubang 2.
[ iv ] Katup Selenoid
Sesuai dengan namanya katup ini memiliki kumparan selenoid untuk menggerakan spool. Dengan sendirinya untuk mengatifkan kumparan selenoid ini diperlukan aliran listrik. Katup selenoid ini dapat berupa katup tiga lubang atau katup lima lubang. Detail dari katup ini dapat digambarkan sebagai berikut : bila arus listrik di alirkan pada kumparan selenoid maka sebuah armatur yang sekaligus berfungsi sebagai katup akan bergerak ke arah kumparan sehingga
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
suplai udara utama akan terbuka. Bila arus listrik dilepaskan maka armatur akan kembali keposisi semula dengan bantuan pegas.
2.6. Keuntungan penggunaan pneumatik
Keuntungan sistem pneumatik jika dibandingkan dengan energi lainnya adalah pelaksanaan penggerakan translasi dan rotasi yang kokoh dengan tenaga yang kasar, serta ketelitian dari peralatan udara mampat yang kontruksinya semakin baik sehingga suatu perkerjaan hampir tidak memerlukan perawatan dan masa pakai yang lama. Sering sistem pneumatik diutamakan karena :
1. Untuk mempermudah perkerjaan mekanisasi
2. Dapat bertahan lebih baik terhadap keadaan kerja tertentu.
Di bawali ini beberapa keuntungan dari sistem pneumatik adalah sebagai berikut :
1. Aman
Aman dalam hubungan penggunaan pneumatik meskipun dalam ruangan tanpa udara.
2. Aman terhadap kebakaran atau ledakan
a. Terjaminnya keamanan dalam kerja dan produksi.
b. Terjaminnya keamanan dalam ruang yang beresiko pada alat pneumatik 3. Berat alat ringan
Berat alat ringan jika dibandingkan dengan mesin elektrik jauh lebih kecil perbandingan beratnya
4. Bersih dan Kering
a. Bersih meskipun ada kebocoran pipa, benda kerja tidak akan menjadi kotor.
b. Kering meskipun ada kerusakan pipa, benda kerja tidak akan ada pengotoran bintik minyak, dan sebagainya.
5. Biaya Pemasangan Murah
a. Tidak memerlukan saluran balik karena udara bekas dibuang begitu saja. b. Peralatan udara mampat dengan kapasitas yang dapat melayani semua
pemakai dalam satu industri. 6. Dapat Bergerak
Udara dapat bergerak bebas melalui selang statis dan dapat membersihkan kebebasan bergerak besar sekali
7. Dapat Diatur Bertingkat
a. Dengan katup pengatur arus kecepatan dan gaya dari nilai minimum. b. Siklus kerja yang telah dinilai dapat diselesaikan meskipun dapat
diselesaikan meskipun penyediaan listrik tiba-tiba terhenti. Pada alat berat yang terdapat pada pabrik-pabrik
8. Fluida Kerja Cepat
a. Kecepatan udara yang dapat menyingkatkan waktu penghidupan pneumatik dan perubahan energi menjadi kerja cepat
b. Jumlah kecepatan tinggi dan torak besar
c. Kecepatan silinder dapat diatur sesuai penggunaannya
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
9. Fluida Kerja Mudah
a. Mudah diperoleh karena udara tersedia dimana-mana dalam jumlah tidak terbatas.
b. Mudah diangkut karena udara bertekanan dapat dialirkan ketempat yang diinginkan melalui saluran cabang dengaa pipa selang dari kompresor 10. Fluida Kerja Murah.
Fluida murah karena menyangkut energi (udara adalah gratis yang mudah di peroleh dimana saja.
11. Jaminan Kerja Besar
a. Peralatan dan komponennya sangat sensitif terhadap minyak, air, dan debu.
b. Peralatan dan komponenya pada suhu tinggi dapat digunakan sepenuhnya.
c. Peralatan dan komponennya pada susu yang cepat dapat berfungsi 12. Kontruksi Kokoh
Kontruksi harus kokoh karena komponen pneumatik dikontruksikan secara kompak dan kokoh, maka berpengaruh terhadap gangguan
13. Mudah di Pelihara
a. Kcntruksi sederhana sehingga peralatan udara mampat hampir tidak peka gangguan. Waktu pemasangan singkat dan kerusakan dapat direparasi sendiri.
b. Komponen sederhana sehingga mudah dipasang dan dibuka c. Gerak lurus sederhana tanpa komponen mekanik
14. Pengawasan
Pengawasan dapat diukur dengan manometer yang berguna untuk mengukur tekanan kerja dan gaya komponen udara mampat bila menggunakan PLC (Progam Logika Kontrol )
15. Penggunaan Ulang
Penggunaan ulang komponen pneamatik data digunakan lagi, sesuai keinginan bila menggunakan PLC.
16. Rasional ( menguntungkan )
a. Tenaga lebih Murah dari tenaga otot manusia atau hewan b. Komponen peralatannya lebih murah dari pada hidrolik. 17. Tahan Suhu
a. Udara bersih dapat digunakan pada suhu berapa saja.
b. Udara mampat dapat digunakan pada ; lingkungan yang sangat panas. c. Saluran pipa dapat digunakan pada lingkungan yang panas sekali.
18. Tidak perlu pendingin fluida kerja udara tidak perlu ganti sehingga menghemat biaya
Bila diperhatikan maka dapat disimpulkan bahwa pneumatik akan menguntungkan jika :
a. Udara mampat dapat diperoleh. b. Ruang yang tersedia banyak. c. Kecepat besar.
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
2.7. Kerugian Menggunakan Pneumatik
Dalam menggunakan pneumatik selain memiliki keuntungan-keuntungan juga terdapat beberapa kerugiannya, antara lain sebagai berikut :
a. Biaya energi tinggi.
Maka dalam berproduksi dan distribusi dibutuhkan peralatan khusus, jika dibandingkan dengan mesin elektrik jauh lebih tinggi perbandingan biaya. b. Gangguan Suara.
Karena fluida yang dipakai berasal dari kompresor mengalir keluar maka suara menimbulkan kebisingan.
c. Kelembaban Udara.
Kelembaban udara dalam udara mampat berwujud tetesan embun air (embun) terjadi pada suhu menurun dan tekanan meningkat.
d. Terjadi Pembekuan.
Pembekuan dapat tedadi sampai menjadi air ada pemuaian tiba-tiba, dan penurunan suhu besar.
e. Terbatasnya Gaya Tekanan.
Untuk gaya yang besar pada suhu tekanan di butuhkan diameter torak yang besar.
f. Peka Terhadap Kebocoran.
Terutama pada jaringan udara mampat yang besar dan luas, dimana sering terjadi kebocoran pada pipa, maka secara teoritis pamakaian udara bertekanan akan lebih besar dari yang dibutuhkan.
Hal-hal yang merugikan dari alat pneumatik dianggap sebagai keterbatasan. Jalan keluar yang harus dilakukan dari kekurangan ini adalah
- Ganguan Suara
Pemecahan : Memberikan perendam suara (silinder). - Kelembaban Udara.
Pemecahan : Mengunakan filter untuk memisahkan air, embur, dan kotoran.
- Peka Terhadap Kebocoran.
Pemecaban : Mengunakan perapat berkualitas tinggi. - Terbatasnya Gaya Pembekuan.
Pemecahan : Menyerap energi pada tekanan kejutan actuator.
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
BAB III
PROSES PEMBUATAN ALAT DAN PERANCANGAN ALAT
3.1. Kerangka utama
Kerangka utama, perancangan ini berfungsi sebagai penopang dari komponen - komponen utama yang terdapat dalam mesin bor sistem, pneumatik ini, rangka pada mesin terbuat dari besi yang ringan tetapi kuat serta tahan karat dan korosi.
Untuk menjaga agar harga mesin ini cukup terjangkau dengan masyarakat maka rangka mesin ini di desain sesederhana mungkin sehingga material yang dipakai seminimal mungkin namun tentunya tidak mengurangi kekuatan dan estetikanya.
Karena fungsinya sangat penting kerangka utama memiliki beberapa criteria yaitu :
¾ Mampu menahan seluruh gaya dar, beban yang ada.
¾ Memiliki mekanisme penyambungan yang mudah dan baik dengan seluruh system.
¾ Dapat dilakukan perakitan yang mudah.
Jenis material yang digunakan untuk pembuatan kerangka ini,antara lain - Besi Hollow ukuran 20 x 20 mm
- Besi plat dengan tebal 4 mm - Besi plat dengan tebal 5 mm
3.2 Box Panel
Box panel terbuat dari plat seng dengan ketebalan 0,4 mm, box panel ini berfungsi untuk penempatan komponen - komponen diantaranya
- PLC
- DCP (Dercanon counter pack) - Riley - Kontaktor - Sekring ( puese) - Pressure gauge - Pressure regurator - Tombol Power - Tombol stop - Tombol start
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
3.3 Perakitan Alat
Setelah bahan, tersedia (besi hollow dan lembaran plat dan seng ) dipotong sesuai ukuran yang diperlukan, juga digunakan papan kayu sebagai alas atau penopang dan komponen mesin bor, pneumatik lainnya, plat - plat besi tersebut di sambung melaui proses pengelasan.
Besi ini dipilih karena dalam proses pengelasan lebih mudah dan sesuai dengan kebutuhan karena besi cukup kuat menahan beban yang berat sedangkan untuk dudukan silinder pneumatic dan mesin bor menggunakan papan kayu yang telah dibaut dengan rangka, yaitu dengan ketebalan 12 mm, papan ini dipilih karena selain kuat juga mudah didapat dan harganya juga relatif murah.
Papan kayu ini memiliki kekuatan yang cukup untuk menerima beban yang diberikan oleh sislinder pneumatik dan mesin bor. Pada landasan diberikan plat untuk dudukan rangka hal ini dilakukan untuk memudahkan dan memindahkan alat tersebut, selain bal itu plat ini juga dapat dengan mudah mendapatkan perlakuan pengeboran.
3.4 Perlakuan Pengelasan
Perlakuan pengelasan dilakukan untuk menyambung antara komponen yang satu dengan komponen yang lainnya. Proses ini menggunakan mesin las listrik bukan las karbit, dengan demikian akan didapatkan kualitas penyambungan yang baik. Jenis sambungan yang banyak dilakukan adalah sambungan sudut (filled weld).
Proses pengelasan dilakukan untuk menyambung antara besi hollow satu dengan yang lainnya yang diperuntukan sebagai rangka dan frame alat. Penyambungan antara pelat sebagai tahanan dan dudukan mesin bor, dan dudukan panel lainnya.
Proses pengelasan dilakukan untuk menyambung antara besi hollow yang satu dengan yang lainnya yang diperutukan untuk menyambung pelat tersebut sehingga terbentuk frame.
Gambar 1. Perlakuan Pengelasan
3.5 Perlakuan Pengeboran
Perlakuan pengeboran dilakukan untuk membuat lubang pada pelat yang digunakan untuk dudukan silinder longdress, pembuatan jalur selang-selang pneumatik. Lubang yang dibuat digunkaan untuk memasukan baut-baut, sebelumnya ada beberapa lubang yang lebih dulu ditap untuk membuat alur.
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
Pengeboran dilakukan dengan kecepatan putar sebesar 3 80 rpm dan feeding 0,18 mm/rev dan jarak pemakanan 11 mm.
3.6 Pemasangan Mur dan Baut
Baut yang digunakan pada alat ini menggunakan berbagai macam jenis baut yang memiliki berbagai ukuran tergantung dari pada elemen mesin yang hendak diikat dengan baut dan mur.
Pada rancangan ini baut digunakan sebagai penyambung komponen-komponen elemen mesin dengan rangka.
¾ Penyambungan antara longdress dengan rangka.
¾ Penyambungan antara pelat siku dengan rangka.
¾ Penyambungan antara dudukan ban dengan model kendaraan
¾ Penyambungan antara seng dengan control panel.
¾ Penyambungan antara konveter dengan landasan kayu.
¾ Penyambungan antara kayu dengan rangka.
3.7 Komponen - komponen utama mesin bor [ i ] PLC
Sebuah perkumpulan dalam bidang industri kelistrikan yang membentengi PLC yaitu NEMA (The National Elektrical Manufacturer Association) mendefinisikan PLC sebagai piranti elektronika digital yang menggunakan memori yang bisa deprogram sebagai penyimpan inteinal dari sekumpulan instruksi dengan mengimplementasian fungsi-fungsi tertentu, seperti logika, sekuensial, pewawktuan, perhitungan, dan aritmatika, untuk mengendalikan berbagai jenis mesin ataupun proses melalui modul I/O digital dan atau analog.
PLC merupakan system yang dapat memanipulasi, mengeksekusi, dan atau memonitor keadaan proses pada laju yang amat cepat, dengan dasar data yang bisa diprogram dalam system berbasis mikroprosesor intregral. PLC menerima masukan dan menghasilkan keluaran sinyal-sinyal listrik untuk mengendalikan suatu system. [Ref 6 ; 67]
Dengan demikian besaran-besaran fisika dan kimia yang dikendalikan, sebelum diolah oleh PLC, akan diubah menjadi sinyal listrik baik analog maupun digital, yang merupakan data dasarnya.
Karakter proses yang dikendalikan oleh PLC sendiri merupakan proses yang sifatnya bertahap, yakni proses itu berjalan urut untuk mencapai kondisi akhir yang diharapkan. Dengan kata lain proses itu terdiri dari beberapa subproses dimana subproses
Tertentu akan berjalan sesudah subproses sebefumnya terjadi. Istilah umum yang digunakan untuk proses yang berwatak demikian adalah proses
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
sekuensial (sequential process). Sebagai perbandingan, system kontrol yang populer selain PLC, misalnya Distributed Control System (DCS), mampu menangani proses-proses yang bersifat sekuensial dan juga kontinyu (Continuous process) serta mencakup loop kendali yang relatif banyak. [Ref 6 ; 68]
PLC mempunyai beberapa kemampuan yaitu sebagai relay switching operasi aritmatika, seperti penjumlahan - pembagian dan melakukan perbandingan dan melakukan perbandingan content register.
Beberapa keuntunagn yang dimiliki PLC jika dibanding dengan Control wired Logic yaitu :
1. Sifat kerja controlled device nya pada wired logic bersifat spisifik atau khusus: sedangkan pada PLC bersifat umum.
2. Skala control pada wired logic hanya mencakup skala kecil dan medium saja sedangkan pada PLC dapat bekerja pada skala medium dan luas.
3. Penggantian dan penambahan komponen pada wired logic sulit sedangkan pada PLC mudah.
4. Perawatan pada wired logic sangat sulit sedangkan pada PLC mudah.
Ditinjau dari segi kerugian yang dapat ditimbulkan dengan penggunaan PLC ini dalam berbagai jenis kegiatan industri antara lain sebagai berikut :
1. Berdasarkan pengamatan lapangan babwa sifat alat pengendali tersebut belum dikuasai penggunaannya oleh tenaga ahli di Indonesia maka tenaga ahli yang tersedia masih sangat terbatas sehingga hasil yang diinginkan belum maksimal untuk menunjang kegiatan industri di Indonesia.
2. Karena jenis/tipe PLC sangat tergantung dari Negara asal PLC tersebut diproduksi, maka bahasa pemograman yang digunakan berbeda sehingga tidak ada standar bahasa yang baku meskipun tujuannya sama, sehingga perlu adanya adaptasi penggunaan PLC yang satu dengan yang lain yang harus dilakukan oleh tenaga ahli di Indonesia.
[ ii ] Prinsip Kerja PLC
Untuk menggambarkan prinsip kerja PLC yang merupakan satu perangkat control yang berbasis computer secara sederhana adalah sebagai berikut.
Proses keluaran
Masukan
Gambar 3.Prinsip Kerja PLC Secara Sederhana
Untuk lebih lengkap dalam menggambarkan hubungan antara computer, PLC dengan Panel control (peralatan Input dan Output) maka untuk memudahkannya dibuat blok diagram interface sebagai berikut
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
Blok Diagram Interface
Gambar 3.6.3 Hubungan Antara Komputer, PLC, Dan Panel Kontrol
[ iii ] Mata bor
Mata bor adalah salah satu dari mesin perkakas yang paling sederhana yang digunkan dalam produksi dan pekerjaan ruang perkakas. Pengeboran adalah membuat lubang pada sebuah obyek ( benda kerja ). Perancangan alat ini menggunakan jenis mesin bor tegak, mempunyai mekanisme hantar daya untuk pengeboran putar.
Mempunyai spesikasi sebagai berikut: Tegangan : 220 V Frekucns,. : 50 Hz Berat : 5 kg Power : 100 watt Langkah bor : 2,54 cm Putaran : 5000 - 8500 rpm [ i ] Sensor Photodektrik
Sensor photodektrik adalah sensor yang bekerja mempergunakan sarana cahaya. Sebuah sumber cahaya akan mengeluarkan cahaya dengan panjang gelombang tertentu. Bagian penerima akan menerima cahaya tersebut secara langsung ataupun melalui pantulan.
[ ii ] Photoelektrik Retroreflektif
Pada sensor photoelektrik tipe retroreflektif sumber cahaya dan penerima hanya menjadi satti tetapi penerima hanya dapat menerima cahaya yang dipantulkan pada sudut tertentu oleh cermin khusus.
Cermin khusus tersebut diberikan bersama photoelektrik yang bersangkutan. Apabila cahaya tidak diterima oleh penerima maka sensor ini akan aktif Jarak lensa terhadap sensor tergantung jenis dan besar lensa serta spesifikasi sensor.
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
Gambar 4. Sensor Photoelektrik Retroreflektif
[ iii ] Photoelektrik Ganda (Through Beam)
Sumber pemancar (Tx) cahaya dan penerima (Rx) terpisah diletakkan berhadapan. Sensor ini merupakan sensor yang terjauh jarak jangkauannya. Bila objek lewat memotong jalur maka sensor aktif Jarak antara pemancar dan penerima tergantung karakteristik tersebut serta, pengaturan sensitifitas yang diatur oleh operator. Bentuk objek bidik ditunjukkan pada gambar di bawah ini :
Gambar 5. Sensor Photoelektrik Ganda
[ iv ] Selenoid (Direction Control Valve Selenoid)
Selenoid adalah sebuah penggerak yang berupa kumparan kawat yang melingkari sebuah batang besi, dan akan menghasilkan gaya medan magnet jika di dalam kumparan kawat tersebut dialid tegangan listrik. Sehingga batang besi yang
berada di dalam kumparan tersebut akan menjadi bersifat magnet selama tegangan listrik masih mengalir dalam lilitan kumparan kawat. Karena batang besi tersebut sudah bersifat magnet, sehingga dapat menarik benda yang terbuat dari besi juga yang berada tepat diatas kumparan tersebut.
Dalam hal ini memiliki sifat Normaly Close. Yang berarti pada kondisi awalnya pintu telah tertutup apabila solenoid tersebut dialiri arus listrik, karena medan magnet menarik pintu besi. Selenoid akan terbuka apabila arus listrik terputus. P I N T U P I N T U Kumparan dengan inti besi lunak
Gambar 6. Penampang Selenoid
[ v ] Kompresor Udara
Udara yang berada diatmosfir dimanfaatkan dengan cara dihisap oleh kompresor, kemudian dialirkan melalui beberapa. komponen pneumatik yang lain sehingga menjadi sumber tenaga penggerak aktuator, kompresor udara ini cocok untuk kebutuhan kecil dan untuk tekanan pemempatan tinggi. Sedangkan pada kompresor piston sangat cocok untuk alat mesin bor pneumatik ini, berdasarkan
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
tekanan kerja, kapasitas dan cara menggerakan pada umumnya kompresor yang digunakan adalah jenis piston/torak.
[ vi ] Kompresor Piston/Torak
Kompresor piston menghisap udara masuk kedalam ruang silinder melalui katup masuk (katup hisap) yang biasanya terbuka secara otomatis, kemudian. kompresor piston memampatkan udara yang berada didalam silinder tersebut sehingga udara mampat terdorong kesaluran mampat melalui katup keluar (katup mampat) yang juga terbuka secara otomatis.
Kompresor piston tergantung dari kebutuhan akan kapasitas aliran udara, untuk kebutuhan akan tekanan udara yang relatif tinggi maka silinder yang dirancang dengan susunan seri sedangkan untuk kebutuhan akan kapasitas aliran udara yang besar maka silinder dirancang dengan susunan paralel.
Kompresor piston dapat menghasilkan tekanan tinggi tidak terbalas dengan kapasitas terbatas. Hal tesebut dengan asumsi bahwa ledakan dapat dicegah dengan pembentukan konstruksi. Keuntungan dari kompresor piston hampir tidak memeriukan perbaikan meskipun ada beberapa komponen pneumatik yang saling berhubungan dan bergerak.
Terdapat banyak jenis kompresor di pasaran seperti kompresor torak, kompresorpiston rotary, dan kompresor alir.
Dalam pembuatan alat mesin bor dengan sistem pneumatik ini digunakan kompresor dengan tipe kompresor torak tunggal dengan spesifikasi sebagai berikut :
¾ Tekananan : 8 Pa
¾ Power : 1,5 kW
¾ Kapasitas : 0,175 ml
Dalam kompresor terdapat beberapa bagian antara lain
a. Pressure regulator yang berfungsi sebagai petunjuk besamya tekanan yang terdapat pada kompresor.
b. Pressure regulator berfungsi untuk mengatur tekanan udara pada kompresor agar tekakan konstan sebelum masuk kompresor.
[ vii ] Mata Bor
Mata Bor adalah pahat yang membuat lubang pada objek atau benda kerja. Pada umunmya mata bor terdapat tepi pabat pada ujung web yang menghubungkan kedua pemotong. Alat ini menggunakan mata bor ukuran sebagai berikut :
¾ Steel Materials : 0,003175 m
¾ Non Metallic : 0,00635 m
¾ Rials : 0,00476 m
3.8 Pneumatik
Pneumatik adalah udara mampat yang dapat digerakan sehingga menghasilkan suatu sistem kerja, sedangkan dalam pengertian teknik pneumatik adalah alat pengerak, pengendali, pengatur, penghubung, dan perentangan yang mengambil gaya dan penggerakannya udara mampat. Di alat ini menggunakan
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
Pneumatik silender kerja ganda (double acting) dengan spesifikasi sebagai berikut:
¾ Diameter : 20 mm
¾ Langkah : 20 mm
Gambar 7. Silinder Kerja Ganda
3.9 Selang
Selang disini berfungsi sebagai penghantar aliran udara dari kompresor, hingga silinder kerja ganda dapat bekerja. Selang tersebut membutuhkan kurang lebih 10 m dan berdiameter luar 5mm dan diameter dalam 3 mm, dan yang dibawa masuk ke selang dari kompresor menuju rangkian pneumatic sampai silinder kerja ganda dapat mengeluarkan actuator sesuai dengan yang diiginkan.
Gambar 8. Selang Pneumatik
3.10 Distribusi Udara
Distribusi udara/penyalur fungsinya sangat penting agar udara dapat mengalir dan silinder kerja ganda dapat bekerja sesuai dengan yang kita inginkan, rangkaian pneumatik memiliki peranan yang saagat penting untuk mengalirkan udara bertekanan dan mengatur kerja rangkaian. Pada sistem pneumatik ini terdiri dari beberapa bagian yaitu :
1. Katup Kontrol 2. Togel
3. Nepel
4. Katup Kontrol Kecepatan
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
[ i ] Katup Kontrof
Katup kontrol diisi berfungsi sebagai pengontrol gerak bolak-balik dari piston juga untuk mengatur debit udara yang masuk kedalam aktuantor dengan memperbesar dan memperkecil luas penampang saluran yang akhirnya mempengaruhi kecepatan gerakan actuantor dan rangkaian pneumatik. Katup ini bisa dipotong tersendiri dalam rangkaian atau langsung pada saluran aktuator
Gambar 9. Katup Kontrol
[ ii ] Togel
Togle disini berfungsi sebagai elemen sinyal untuk menghubungkan dan memutuskan aliran udara. Togle mempunyai peranan yang sangat penting, udara keluar dari kompresor dapat dihentikan dan dihentikan melalui togle. Rangkaian pneumatik dapat berjalan dan berhenti dengan adanya togle ini.
Gambar 10. Katup Togle
[ iii ] Nepel
Komponen disini memiliki peranan yang sangat penting dalam pemasangan selang dari kompresor menuju rangkaian pneumatik guna mengalirkan udara bertekanan, udara dapat dikeluarkan setelah udara mencapai volume yang diinginkan, komponen yang dipakai oleh penulis adalah:
Pada alat pneumatik ini berfungsi untuk menyambung selang ke benda kerja yang sudah terpasang di plat. Penyambung yang kita gunakan sangat ada 3 jenis, dua buah penyambung bentuk L yang berfungsi sebagai penyambung selang ke silinder, dua buah penyambung bentuk T yang berfungsi sebagai penyambung selang, dari power menuju valve dan diteruskan ke limit switch dan penyambung bentuk lurus yang berfungsi menyambung dari selang menuju selang atau selang ke benda kerja seperti valve, limit switch dan katup start.
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
Gambar 11. Nepel
[ iv ] Katup Kontrol Kecepatan (adjustable throttle valve)
Katup kontrol kecepatan adalah penghambat allran selain itu katup ini juga dilengkapi dengan sebuah katup check menutup dan mengeluarkan aliran udara pada arah aliran yang akan mengatur kecepatan kerja silinder. Sehingga dengan demikian hanya bisa mengalir melalui penampang yang telah diatur pada arah berlawanan, udara bisa mengalir secara bebas melalui katup check yang terbuka, selain bisa dipergunakan sesuai fungsi masing-masing juga bisa dikembalikan penggunaannya untuk tujuan atau fungsi tertentu.
3.11 Perancangan Sistem
Sistem Pneumatik yang alcan digunakan untuk mengembangkan prototip alat mesin bor dipilih yang sederhana, murah, handal dan aman. Untuk itu dalam perancangan prototip sistem pneumatiknya harus memenuhi beberapa syarat di bawah ini
- Gerakan silinder harus dapat diatur pada saat gerakan menutup atau gerakan positif dari sifinder tidak sesuai dengan rancangan kerja mesin maka gerakan tersebut dapat diperkecil atau diperbesar.
- Komponen pneumatik yang digunakan diupayakan seefisien mungkin tanpa mengurangi kinerja dari mesin.
- Sistem harus sederhana untuk memudahkan dalam penyusunan rangkaian dan perawatannya.
Sistem yang direncanakan memiliki dua bagian yang terdiri dari sistem pengontrol gerak utama dan sistem pemandu gerakan. Pada sistem pengontrol gerak utama untuk memberikan gerak bolak balik pada silinder terdiri atas katup lima lubang serta katup pengatur aliran. Untuk sistem pemandu dapat menggunakan isyarat pneumatik atau dengan menggunakan isyarat listrik.
Pada sistem pemandu dengan pneumatik digunakan isyarat angin untuk mengaktifkan buka tutup pada katup, tetapi sistem ini kurang efisien untuk pengontrolan jarak jauh. Untuk itu dapat digunakan sistem pemandu listrik dengan bantuan katup selenoid. Untuk itu dalam perancangan ini digunakan pemandu listrik dengan memanfaatkan rangkaian sensor elektronik.
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
Sistem pneumatik sederhana dari rangkaian yang dirancang dapat dilihat pada skema di bawah ini :
Gambar 13. Perancangan Sistem Pneumatik
Keterangan Gambar
1.0 = Actuating cylinder (double acting) berftmgsi sebagai penggeser benda kerja.
2.0 = Actuating cylinder (double acting) berfungsi sebagai penjepit atau cak pada benda kerja.
3.0 = Actuating cylinder (double ac~ing) berfungsi sebagai naik turun pada mesin bor.
1.1 = Direction control valve untuk 1.0 2.1 = Direction control valve untuk 2.0 3.1 = Direction control valve untuk 3.0
2.01 = Orifice check valve untuk 2.0 2.02 = Orifice check valve untuk 2.0 3.01 = Orifice check valve untuk 3.0 3.02 = Orifice check valve untuk 3.0 0.1A = Kompresor
0.1 B = ASU (Air Service Unit) Pressure Regulator dan Service Gauge
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
BAB IV PERHITUNGAN
4.1 Proses Pneumatik [ i ] Kompresor
Dalam proses pneumatik disini kompresor bekerja mengalirkan udara dari luar menuju ke sistem. Kompresor memiliki dua aliran, yaitu :
1. Saluran ini yaitu saluran yang digunakan untuk menghisap udara dari luar masuk ke kompresor.
2. Saluran out yaitu saluran yang digunakan untuk mengalirkan udara dari dalam kompresor yang telah mengalami kompresi untuk keluar masuk dalam sistem.
[ ii ] Valve
Valve memiliki lima saluran yang fungsinya :
1. Saluran tenaga atau power biasanya disimbolkan dengan angka 1 atau huruf P. Saluran power merupakan saluran tenaga yang dihasilkan oleh kompresor yang digunakan oleh sistem.
2. Saluran kerja terdiri dari 2 saluran yang biasanya disimbolkan dengan angka 2 dan 4 atau hurup A dan B. Saluran kerja merupakan saluran yang digunakan udara untuk sirkulasi ke aktuator.
3. Saluran pembuangan terdiri dari dua saluran yang biasanya disimbolkan dengan angka 3 dan 5 atau huruf R dan S. Saluran pembuangan atau saluran yang digunakan untuk pembuangan udara hasil proses dari sistem.
[ iii ] Silinder Ganda
Pada silinder ganda memiliki dua saluran yaitu : 1. Saluran yang membuat batang piston keluar atau out. 2. Saluran yang membuat hatang piston masuk atau in.
4.2 Data teknik yang diperlukan dalam perhitungan
Untuk menentukan kerja sistem diperlukan data/variabel pendukung yang telah diketahui, berikut ini adalah data-data teknik yang telah diketahui
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
Silinder I
- Tipe = CDYIS 10H-15
- Jenis gerakan = Double acting - Diameter dalam (D) = 8mm = 0,008 m - Langkah kerja (L) = 230 mm = 0,23 m - Efisiensi piston = 0,9 %
Silinder 11 & III
- Tipe = CXSM20-20
- Jenis gerakan = Doubleacting - Diameter dalam (D) = 8 mm = 0,008 m - Langkah kerja (L) = 150 mm 0,15 m - Efisiensi piston = 0,7 %
4.3 Analisa dan Pengolahan Data
Dalam mengolah data-data yang telah diketahui penulis akan menampilkan langkah perhitungan pada tiap-tiap silinder.
[ i ] Perhitungan pada silindir I
¾ Luas permukaan silinuder, .D2 4 A=π
Diketahui
Maka
luas permukaan silinder .(0,008)2 0,0000502m2 4
A=π =
= 5,02 . 10-5 m2
¾ Kecepatan alir fluida,
p . A p v= c Diketahui
- Daya kompresi ( Pc ) = 573 watt
- Tekanan maksimum ( p ) = 3 x 10 5 N/m2 - Luas permukaan silinder (A ) = 5,02 . 10-5m2 Maka
Kecepatan alir fluida ,
) 10 . 3 ( ) (5.02.10 573 v 5 5 -= = 38,50 m/s ¾ Bilangan Reynold, Rc = µ vDp Diketahui
- kecepatan alir fluida. (v) = 38,05 m/s - diameter dalam. ( D ) = 0,008 M
dari tabel sifat - sifat udara didapat kan : ρ = 1, 17 74 kg/m3
µ = 1,1846 - 10-5 kg/m.s
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
Maka Bilangan Reynold, -5 10 . 1,1846 4) 008)(1,177 (38,05)(0, = c R = 30,254 . 103 Aliran yang terbentuk adalah turbulen
f = 30254 316 , 0 0,316= c R = 0,0000104 ¾ Head loss hf = f g D v L 2 . 2 Diketahui : - langkah kerja ( L ) = 0,23 m - kecepatan alir fluida ( v ) = 38,05 m/s - diameter dalam ( D ) = 0,008m - gaya grafitasi ( g ) = 9,81 m/s2 - aliran turbulence ( f ) = 0,0000104 Maka, Head loss, hf = 0,0000 104. 1) 9,8 x 2 x (0,008 05) (0,23)(38, 2 = 0,022 m
¾ Konversi Head loss menjadi pressure loss, P =ρghf, =γ.hf
Diketahui
- P = 1,774 kg/m3
- Gaya grafitasi ( g ) = 9,81 m/s2 - Head loss (hf) = 0,022 m
Maka,
γ = ρ . g = 1,177 x 9,81 = 11,55 N/m2
Konversi head loss menjadi pressure loss P = 11,55 x 0,022 = 0, 254 N/m2
[ ii ] perhitungan silinder II & III
¾ Luas permukaan silinder, 2 4 D A=π Diketahui
- diameter dalam ( D ) 8 mm = 0,008 m Maka
luas permukaan silinder
2 4 π = A (0.008 )2 = 0,0000502 m2 = 5,02 .10-5 m2
¾ Kecepatan alir fluida
p A P v C . = Diketahui
- Daya kompresi ( Pc ) = 573 watt
- Tekanan maksimum. ( p ) = 3x 105 N/m2 - Luas permukaan silinder (A ) = 5,02 . 0-5 m2
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
Maka
Kecepatan alir fluida ,
) 10 . )(3 10 . (5,02 573 5 5 -= v = 38,50 m/s ¾ Bilangan Reynold , µ ρ vD Rc = Diketahui
- kecepatan alir fluida ( v ) = 38,05 m/s - diameter dalam ( D ) = 0,008 m
dari tabel sifat - sifat udara didapat kan : ρ = 1, 17 74 kg/m3 µ = 1,1846 .10-5 kg/m.s maka Bilangan Reynold, -5 10 . 1,1846 4) 008)(1,177 (38,05)(0, = c R = 30,254 - 103
Aliran yang terbentuk adalah turbulen
f = 254 , 30 316 , 0 0,316= c R = 0,0000104
¾ Head loss hf = f g D v L 2 . 2 Diketahui : - langkah kerja ( L ) = 0,23 m - kecepatan alir fluida ( v ) = 38,05 m/s - diameter dalam ( D ) = 0,008 m - gaya grafitasi ( g ) = 9,81 m/s2 - aliran turbulence ( f ) = 0,0000104 Maka, Head loss, hf = 0,0000 104. 1) 9,8 x (2 ) (0,008 05) (0,15)(38, 2 = 0,0144 m
¾ Konversi Head loss menjadi pressure loss, P =ρghf, =γhf
Diketahui - P = 1,774 kg/m3 - Gaya grafitasi ( g ) = 9,81 m/s2 - Head loss (hf) = 0,022 m Maka, γ = ρ . g = 1,177 x 9,81 = 11,55 N/m3
Konversi head loss menjadi pressure loss P = 11,55 x 0,0144 = 0,166 N/m2
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
BAB V KESIMPULAN
5.1 Kesimpulan
Pada rancangan sistem pneumatik pada mesin bor dengan sistem pneumatic ini menggunakan dasar perancangan dari buku dasar perancangan teknik mesin, teori ini digunakan sebagai dasar dari rancangan sistem pneumatic pada mesin bor dengan sistem pneumatic. Dengan menggunakan teori ini pemilihan varian yang terbaik dilakukan, sehingga perancangan akan mendapatkan hasil yang terbaik. Pada alat atau mesin yang saya buat ini, tenaga pneumaticnya menggunakan III silinder
¾ Hasil perhitungan pada silinder
• Luas permukaan silinder ( A ) = 5,02 x 10-5 • Kecepatan alir fluida ( v ) =38,05 m/s • Bilangan reynold (Re) = 30,254 . 103
• Dengan angka reynold 30,254. 103, maka diperoleh koefisien gesek ( f ) = 0,0000104 • Head loss (hf ) = 0,022 m
• Konversi Head loss ( P ) = 0,254 N/m2
¾ Hasil perhitungan pada silinder 11 & III
• Luas pertnukaan. silinder ( A ) = 5,02 . 10-5 m • Kecepatan alir fluida ( v ) = 38,05 m/s • Bilangan reynold ( Re ) = 30,254 . 103 • Dengan angka reynold 30,254. 103, maka diperoleh
koefisien gerak ( f ) = 0,0000104 • Head loss (hf) = 0,022 m
• Konversi Head loss ( P ) = 0,254 N/m2
5.2 Saran
Dalam perancangan ini tentunya masih terdapat banyak kekurangan kekurangan. Untuk itu kami ingin mempelajari lebih jauh lagi untuk mengembangkan ide sehingga dapat menyempumakannya. Dari hasil rancangan ini terdapat beberapa saran dari kami antara lain :
1. Penambahan ukuran, karena untuk saat ini tumpukan kayu hanya terdapat empat buah kayu dengan keadaan standby
2. Motor pemutar masin bor lebih baik menggunakan motor listrik variable yang dilengkapi dengan speed contro, sehingga kecepatan sedemikian
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI
rupa atau dengan kata lain kecepatan dapat diatur sesuai dengan kebutuhan.
3. Perlu penambahan emergency stop untuk mematikan mesin apabila mesin terjadi kerusakan, ini dimaksudkan untuk lebih mengefisienkan waktu kerja.
DAFTAR PUSTAKA
1. Croser, P “Pneumatik TingkatDasarl” Festo didactic, jakarta ; 1994
2. Khurmi, R.S dan Gupta, J.K, “a Text Book Machine Design”. Eurasia Publishing House, New Delhi; 1980
3. Spotss, M.T “Design of Machine Element”. Prentice Hall of India, New Delhi 11000 1: 1978.
4. Mangonon, Pat, L “The Principles of Material Selection for Engineering Design” Prentice Hall International, Inc.
5. Omron “Teori of Sensor & Basic PLC”, P.T Kharisma Pandulima Elektronika, Jakarta
6. Sularso. Suga , Kiyokatsu, “Dasar - dasar Perencanaan dan Pemilihan Bahan”, PT. Pradnya Paramita, Jakarta ; 1983.
7. Sato, Takeshi, G dan Hartanto, Sugiarto, N. “Menggambar Mesin Menurut Sandart Iso”, Willey Eastern. Ltd New Delhi ; 1976.
8. Widharto, S, “Petunjuk Kerja Las”, PT. Pradnya Paramita, Jakarta; 1992
UNIVERSITAS MERCU BUANA FAKULTAS TEKONOLOGI INDUSTRI

![Gambar 10. Katup tiga lubang [ ii ] Katup Lima Lubang](https://thumb-ap.123doks.com/thumbv2/123dok/2312518.2734223/32.892.179.758.804.1083/gambar-katup-tiga-lubang-ii-katup-lima-lubang.webp)