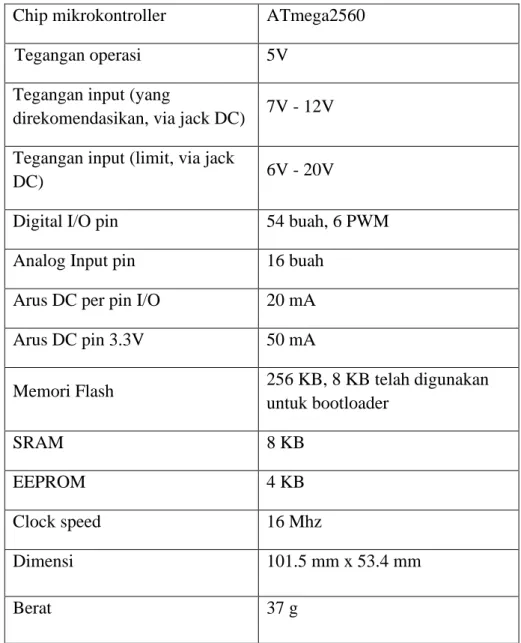
Arduino Mega 2560 dilengkapi dengan osilator 16 Mhz, port USB, jack DC, header ICSP dan tombol reset. Sebuah pin yang menghasilkan tegangan yang diatur sebesar 5 V, dari pin inilah tegangan diatur (disesuaikan) oleh regulator yang tersedia. Arduino Mega 2560 memiliki 54 pin digital pada Arduino Mega yang dapat digunakan sebagai input maupun output, dengan menggunakan fungsi pinMode(), digitalWrite() dan digitalRead().
Pin ini dapat dikonfigurasi untuk memicu interupsi pada nilai rendah, nilai naik atau turun, atau nilai berubah. Perlu diperhatikan bahwa pin ini tidak berada pada lokasi yang sama dengan pin TWI pada Arduino Duemilanove atau Arduino Diecimila. Perangkat lunak Arduino mencakup monitor serial yang memungkinkan data teks sederhana dikirim ke dan dari papan Arduino.
Penyearah adalah bagian dari catu daya yang mengubah sinyal tegangan AC (arus bolak-balik) menjadi tegangan DC (arus searah). Pada dasarnya konsep penyearah gelombang terbagi menjadi 2 jenis yaitu penyearah setengah gelombang dan penyearah setengah gelombang.
Power Supply setengah gelombang
Penyearah setengah gelombang hanya menggunakan 1 dioda sebagai komponen utama untuk mengarahkan gelombang AC. Prinsip kerja penyearah setengah gelombang ini adalah menghilangkan sisi sinyal positif gelombang AC dari trafo. Perhitungan tegangan DC keluaran dari penyearah setengah gelombang mengacu pada kondisi antara fasa ON dan OFF gelombang keluaran.
Berdasarkan kondisi diatas dapat dirumuskan bahwa tegangan keluaran penyearah setengah gelombang adalah Vmax dibagi π (pi). Kelemahan penyearah setengah gelombang adalah keluarannya mempunyai riak yang sangat besar sehingga tidak lancar dan membutuhkan kapasitor yang besar pada aplikasi frekuensi rendah seperti listrik PLN 50 Hz. Kelemahan penyearah setengah gelombang lainnya adalah kurang efisien karena hanya memerlukan satu siklus sinyal.
![Gambar 2.3 Power Supply setengah gelombang [11]](https://thumb-ap.123doks.com/thumbv2/123dok/10822921.0/12.892.274.615.181.361/gambar-2-3-power-supply-setengah-gelombang-11.webp)
Power Supply Gelombang Penuh
Penyearah Gelombang Penuh dengan Trafo CT
Kemudian ketika terminal keluaran trafo di D1 memberikan sinyal puncak negatif, terminal keluaran di D2 memberikan sinyal puncak positif, dalam keadaan ini D1 pada posisi mundur dan D2 pada posisi maju.
Human Machine Interface (HMI)
Dalam dunia industri, HMI dapat berupa antarmuka pengguna grafis (GUI) pada layar tampilan operator mesin atau pengguna yang membutuhkan data pekerjaan dari tampilan mesin. Judul Alat Tugas Akhir: Judul alat tugas akhir merupakan bagian yang menampilkan judul alat simulasi agar masyarakat memahami alat mana yang sedang diawasi oleh HMI. Tombol : Tombol merupakan bagian dari sistem kendali alat tugas akhir yang terhubung dengan Arduino.
Indikator : Indikator ini berbentuk layar yang akan menampilkan indikator keadaan atau kondisi perangkat yang dikendalikan. Monitoring Arus, Tegangan dan Kecepatan : Monitoring ini berbentuk layar yang akan menampilkan arus, tegangan dan kecepatan pada laptop. Arus dan tegangan yang dipantau adalah arus fasa – netral motor dan untuk kecepatannya masing-masing merupakan perhitungan rpm/putaran pada encoder motor.
Sistem HMI ini bekerja secara online dan real time dengan membaca data yang dikirimkan melalui port I/O yang digunakan oleh pengontrol. Port yang biasa digunakan untuk pengontrol dan akan dibaca oleh HMI antara lain port com, port USB, port RS232, dan port serial.[1].
Softstarting
Daya Pada Hubungan 1 Fasa
Besarnya daya yang disuplai oleh motor satu fasa atau daya yang diserap oleh beban satu fasa diperoleh dengan mengalikan tegangan, arus fasa dan cos θ.
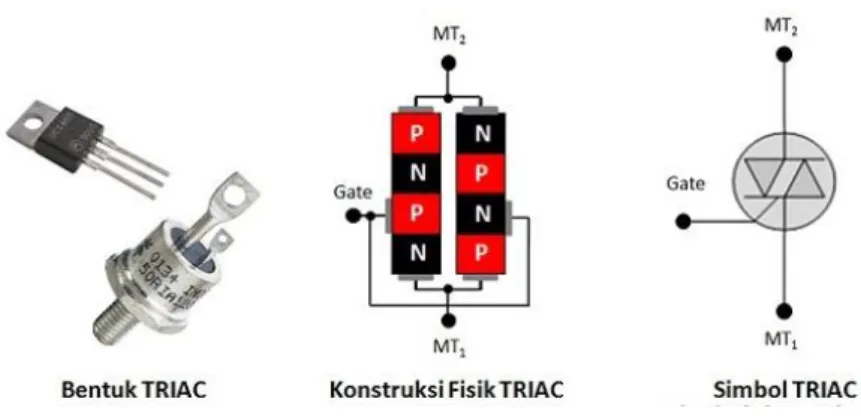
Triac (Triode for Alternating Current)
Terminal Gerbang TRIAC hanya memerlukan arus yang relatif rendah untuk mengendalikan aliran arus listrik AC yang tinggi dari kedua arah terminal. Jika dilihat dari strukturnya, TRIAC merupakan komponen elektronik yang terdiri dari 4 lapisan semikonduktor dan 3 terminal. Ketiga konektor ini antara lain MT1, MT2 dan port. TRIAC merupakan salah satu komponen yang sangat cocok digunakan sebagai Saklar AC, karena dapat mengontrol aliran arus listrik dalam dua arah siklus AC.
Namun, TRIAC umumnya tidak digunakan pada rangkaian switching yang melibatkan daya sangat tinggi.
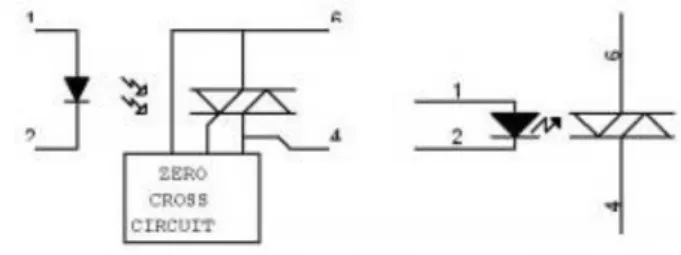
Optoisolator MOC 3021
Kemampuan Optoisolator tipe MOC302x dan MOC304x dalam mengisolasi tegangan antara rangkaian kontrol dan rangkaian daya, arus driver maksimum yang dapat diberikan pada komponen Optoisolator MOC302x dan MOC304x serta tegangan maksimum yang dapat dikontrol dengan Optoisolator dalam mode gergaji meja berikut. Detektor zero crossover merupakan rangkaian yang digunakan untuk mendeteksi gelombang sinus AC 220 volt ketika melewati titik tegangan nol. Di seberang titik nol yang terdeteksi terdapat peralihan dari positif ke negatif dan peralihan dari negatif ke positif.
Di seberang titik nol adalah acuan, yang digunakan sebagai nilai awal waktu tunda untuk memicu triac [15]. Metode ini berfungsi untuk menentukan frekuensi gelombang dengan mendeteksi banyaknya titik nol dalam domain waktu. Dengan menggunakan rangkaian zero crossover detector ini kita dapat mendeteksi titik nol sekaligus mengubah sinyal sinus (sine wave) menjadi sinyal persegi (square wave).
Perpotongan titik nol yang terdeteksi adalah pada peralihan dari siklus positif ke siklus negatif dan peralihan dari siklus negatif ke siklus positif [15]. Selama siklus ini, ia bekerja untuk menentukan frekuensi gelombang dengan mendeteksi jumlah titik nol dalam rentang waktu. Detektor zero crossover bekerja dengan cara mendeteksi perpotongan gelombang sinus AC dengan titik nol AC sehingga dapat memberikan sinyal referensi ketika sinyal PWM terpicu.
Rangkaian detektor zero-crossing ini banyak digunakan pada perangkat pengontrol beban AC yang dikontrol triac. Titik persimpangan dengan tegangan sumber nol untuk beban yang dikendalikan oleh komponen saklar opto-isolator diperlukan untuk menentukan waktu awal untuk memberikan sinyal pemicu atau kontrol ke opto-isolator. Memberikan sinyal keluaran kepada detektor zero-crossing dalam bentuk sinyal gelombang persegi tepat pada titik zero-crossing memastikan bahwa data yang diproses oleh output dapat tersinkronisasi.
Sinyal ini diperoleh dari perpotongan titik nol dan akan memberikan keluaran 5 v “high” jika titik nol telah ditentukan [15].
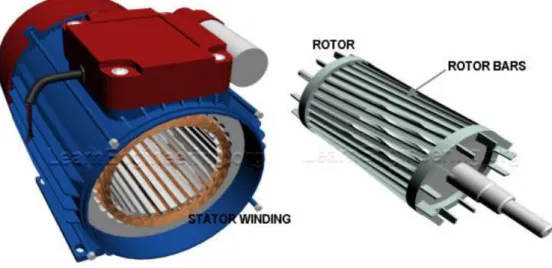
Motor Induksi 1 Fasa
Arus pada kumparan stator menghasilkan medan magnet seperti yang ditunjukkan oleh garis putus-putus pada gambar 2.20. Sekalipun kuat medan magnet stator bervariasi, yaitu maksimum ketika arus maksimum dan nol ketika arus nol dan polaritasnya dibalik secara berkala, tindakan ini hanya akan terjadi sepanjang sumbu AC. Oleh karena itu, medan magnet ini tidak berputar melainkan hanya merupakan medan magnet yang berdenyut pada posisi tetap (stasioner).[8].
Mengikut undang-undang Lenz, arah arus ini (seperti yang ditunjukkan dalam Rajah 2.20) adalah sedemikian rupa sehingga medan magnet yang dihasilkan menentang medan magnet yang menghasilkannya. Arus rotor ini akan menghasilkan medan magnet rotor dan membentuk kutub pada permukaan rotor. Konduktor pemutar akan memotong medan magnet stator supaya daya gerak elektrik timbul pada konduktor.
Jika fluks rotor seperti pada Gambar 2.21 diarahkan ke atas sesuai aturan tangan kanan Fleming, maka arah gaya gerak listrik (ggl) rotor akan mengarah keluar kertas pada paruh atas rotor dan masuk ke dalam kertas. pada bagian bawah rotor. Karena konduktor rotor terbuat dari bahan dengan resistansi rendah dan induktansi tinggi, arus rotor yang dihasilkan akan tertinggal dari gaya gerak listrik rotor hampir 900. Sesuai dengan aturan tangan kanan Fleming, arus rotor ini akan menghasilkan medan magnet seperti terlihat pada Gambar 2.22 karena medan rotor dipisahkan dari medan stator sebesar 900 maka disebut medan.
Nilai maksimum medan ini, seperti ditunjukkan pada gambar 2.23, muncul dalam periode seperempat setelah gaya gerak listrik yang dihasilkan rotor mencapai nilai maksimumnya. Karena arus yang mengalir pada rotor disebabkan oleh gaya listrik bolak-balik, maka medan magnet yang dihasilkan oleh arus tersebut juga bolak-balik dan aksi ini terjadi sepanjang sumbu DB, seperti terlihat pada gambar 2.23. Karena medan silang bekerja dengan sudut 900 terhadap medan magnet stator dengan sudut fasa juga 900 terhadap medan stator, maka kedua medan tersebut bergabung membentuk medan berputar.
Untuk memperoleh torsi putar awal yang lebih besar yaitu dengan menghubungkan kapasitor yang dipasang seri dengan kumparan bantu seperti pada Gambar 2.24b.
Sensor ACS712
Sensor Tegangan
Rangkaian ini pada dasarnya terdiri dari trafo step down yang berfungsi untuk menurunkan tegangan, rangkaian penyearah, filter kapasitor dan rangkaian pembagi tegangan. Pada sensor tegangan ini terdapat dua buah resistor yang digunakan sebagai rangkaian pembagi tegangan yang akan menurunkan tegangan dari sumber tegangan ke tegangan yang diinginkan. Sensor tegangan ini tidak dihubungkan langsung dengan sumber tegangan 220 volt karena tegangan tersebut dianggap terlalu berbahaya untuk ditangani secara langsung, baik bagi perangkat maupun pengguna.
Untuk mengatasi hal tersebut diperlukan trafo step down yang berfungsi untuk menurunkan tegangan hingga mencapai tegangan yang diinginkan. Tegangan tersebut kemudian disearahkan menggunakan dioda penyearah gelombang penuh sehingga tegangan keluaran volt DC berubah karena tegangan sumber antar fasa juga berubah. [4].
Sensor Optocoupler
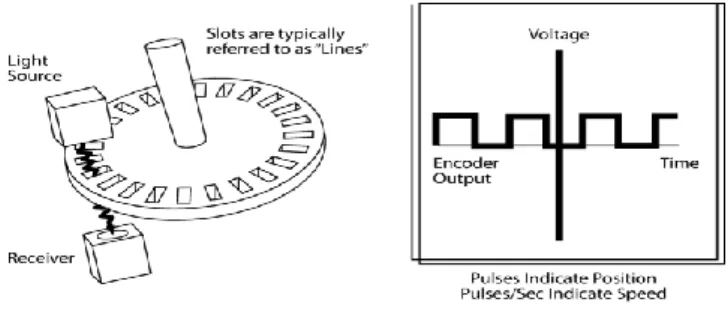
Fototransistor adalah transistor yang peka terhadap energi cahaya untuk menangkap radiasi infra merah. Penerapan optokopler pada tugas akhir ini adalah sebagai rotary encoder yang digunakan untuk mendeteksi kecepatan putaran motor yang nantinya digunakan untuk mentransfer konfigurasi dari star ke delta. Dari gambar diatas menggunakan 8 lubang dan berikut cara mengetahui putaran atau RPM pada mesin.
Misal diketahui lubang pada piringan ada 8 lubang, maka jika sensor membaca jumlah putaran per menit setiap 3 detik dan melewati 180 lubang maka digunakan rumus.
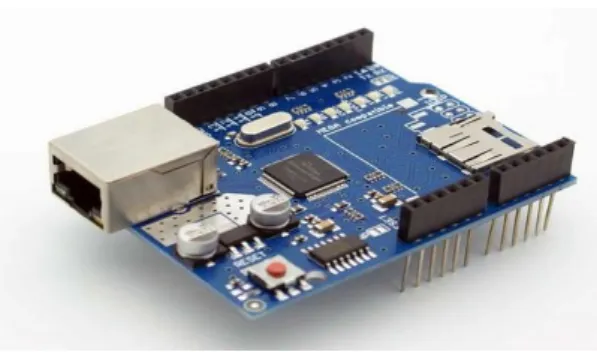
Ethernet Shield
Sehingga board Arduino dapat berkomunikasi baik dengan modul W5100 maupun dengan SD card menggunakan bus SPI melalui header ICSP, yang mana pada board Arduino Uno terdapat pin digital dan 13, sedangkan pada board Arduino Mega terdapat pin digital 50. 51 dan 52. Pada kedua papan Arduino Dalam hal ini pin digital 10 digunakan untuk memilih mode W5100 dan pin digital 4 untuk kartu SD, dimana pin ini tidak digunakan karena pin I/O biasa dapat digunakan. Pada board Arduino Mega, pin digital 53 (SS) tidak digunakan sama sekali, tidak juga untuk memilih antara modul W5100 atau kartu SD, namun masih perlu diatur sebagai output agar antarmuka SPI dapat berfungsi.[6].
Data logger adalah perangkat elektronik untuk merekam data dari waktu ke waktu yang terintegrasi dengan sensor dan instrumen. Pencatat data desktop/PC adalah pencatat data yang dapat dihubungkan melalui komputer dan digunakan untuk mengumpulkan data melalui sensor internal.
![Gambar 2.1 Arduino Mega 2560 [1]](https://thumb-ap.123doks.com/thumbv2/123dok/10822921.0/2.892.195.674.279.509/gambar-2-1-arduino-mega-2560-1.webp)
![Gambar 2.2 Konstruksi transformator [5]](https://thumb-ap.123doks.com/thumbv2/123dok/10822921.0/9.892.246.677.544.770/gambar-2-2-konstruksi-transformator-5.webp)
![Gambar 2.4 Gelombang Output power supply setengah gelombang [11]](https://thumb-ap.123doks.com/thumbv2/123dok/10822921.0/12.892.333.525.900.1005/gambar-gelombang-output-power-supply-setengah-gelombang-11.webp)
![Gambar 2.5 Output Penyearah Setengah Gelombang [11]](https://thumb-ap.123doks.com/thumbv2/123dok/10822921.0/13.892.226.662.679.802/gambar-2-5-output-penyearah-setengah-gelombang-11.webp)
![Gambar 2.6 Rangkaian Pemyearah Gelombang Penuh 4 Dioda [11]](https://thumb-ap.123doks.com/thumbv2/123dok/10822921.0/15.892.321.618.685.815/gambar-2-rangkaian-pemyearah-gelombang-penuh-dioda-11.webp)
![Gambar 2.7 Output Penyearah Gelombang Penuh [11]](https://thumb-ap.123doks.com/thumbv2/123dok/10822921.0/16.892.298.570.269.426/gambar-2-7-output-penyearah-gelombang-penuh-11.webp)
![Gambar 2.8 Rangkaian Penyearah Gelombang Penuh 2 Dioda [11]](https://thumb-ap.123doks.com/thumbv2/123dok/10822921.0/16.892.336.590.710.866/gambar-2-rangkaian-penyearah-gelombang-penuh-dioda-11.webp)
![Gambar 2.9 Output Penyearah Gelombang Penuh [10]](https://thumb-ap.123doks.com/thumbv2/123dok/10822921.0/17.892.261.668.524.776/gambar-2-9-output-penyearah-gelombang-penuh-10.webp)
