Analysis of the neighboring optimal guidance system accuracy for constant acceleration and minimum time for a Mars rendezvous mission. For the deterministic case, the first-order change will be independent of the guidance. For this reason, the anomalies will continue to build up until the final part of the mission.
In general, many of the proposed schemes appear to tailor a performance index to fit the problem. Another consideration that has been somewhat neglected in the design of guidance schemes is the limitedness of the control variables. The first phase of the research is the consideration of the deterministic guidance problem (40),(41).
An algorithm was developed to facilitate the calculation of the open-loop trajectories for the non-linear bang-bang system. The final consideration of this chapter is the conceptual treatment of the full nonlinear problem.
THE DETERMINISTIC PROBLEM
If the spacecraft's actual trajectory remains sufficiently close to the nominal path; then linear perturbation of the plant equations provides a good approximation of the dynamic behavior of the state deviations. The expansions are centered on the nominal trajectory, yielding a system of time-varying linear differential equations. n denotes the Jacobian matrix of the subscript vector: e.g. In connection with this investigation, a little preview of the form of the control solution will be useful.
Therefore, no hope can be placed on obtaining the closed form solution of the sixth-order bang-bang problem discussed here. A 1-rill solution is only possible if the dimension of the system's state can be reduced somehow. For typical injection conditions, these amounts are approximately the same. order of 10 seconds and will therefore be neglected.
Typical values for the elements of TT and. is of the order of 10 seconds and can therefore be neglected with small errors. It should be noted that the deviation of the fuel consumption is constant for any controller that eliminates the state errors.
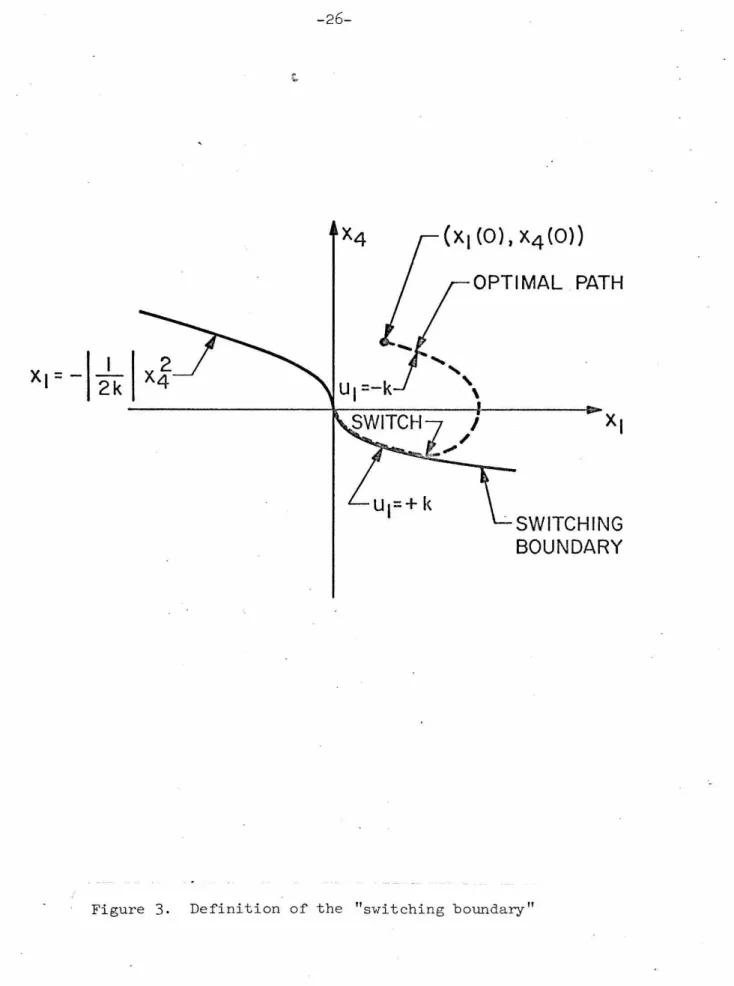
SWITCHING BOUNDARY
A solution of equation 2.25 is sought in the form of the general perturbation expansion. If the second part of the expansion v. 1 is desired, then the following expression must be noted. However, this function may be difficult to achieve due to the behavior of the derivatives of V.
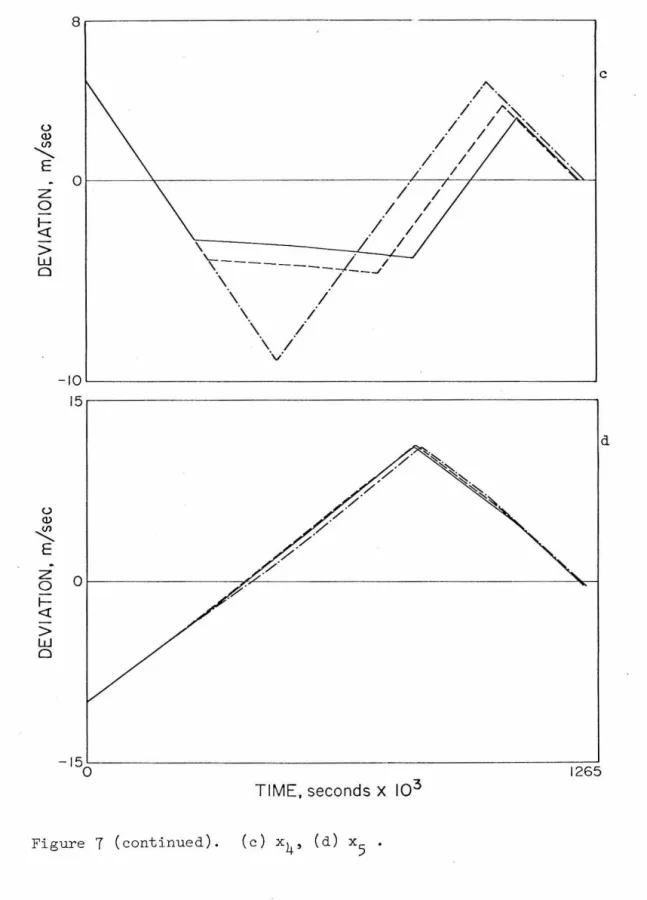
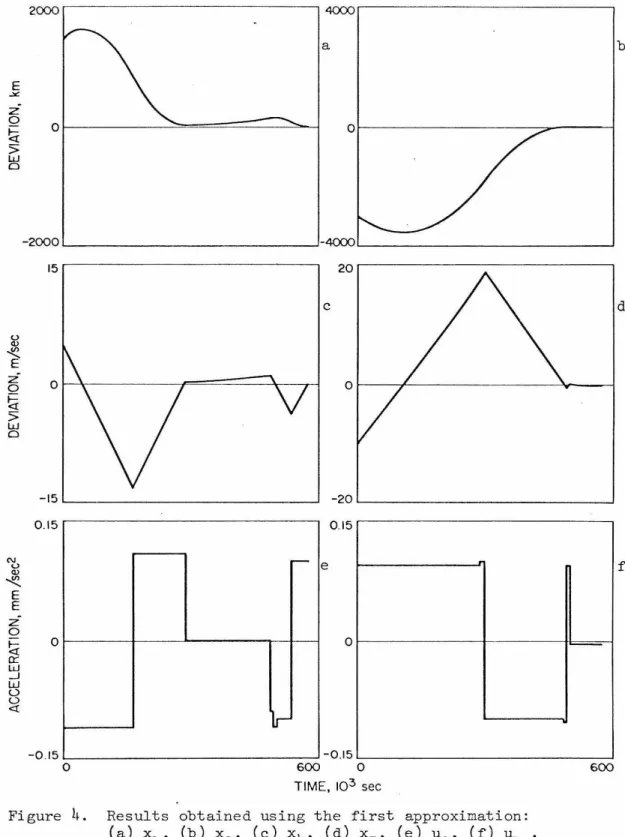
Since large variations of the motor angles are not desirable on a continuous basis, such control action will be limited to small deviations from the nominal angle program. A practical and meaningful light to check the validity of the results is by digital computer simulation. Referring to Figure 4, it can be seen that the accuracy of the controller is very good.
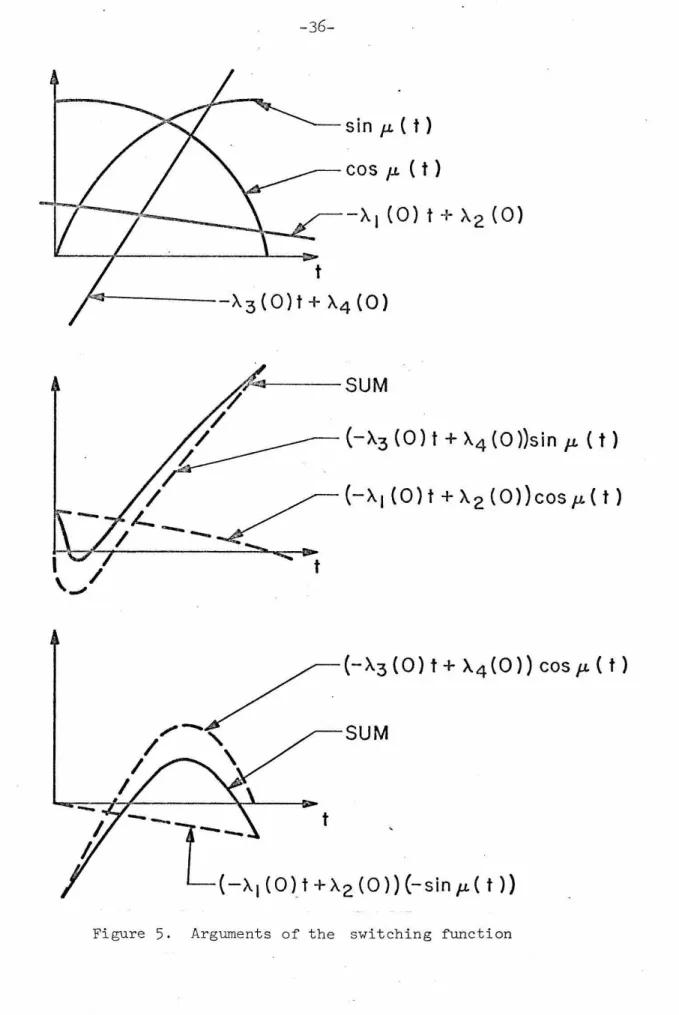
For this derivation the following assumptions are made. i) the vehicle is in heliocentric level flight (ii) the matrix D in equation 2. iii) the maximum control level i is either slowly varying or constant. A review of the linear minimum time problem is given in Appendix A. Some possible realizations of the arguments for the above sgn functions.
8 can be solved for the minimum value of tf and for the switching times of the control variables. The computer simulation of the second approximate solution indicates that there is a need to account for second-order effects in the control variables. This important result represents a major step towards the solution of the stochastic problem, which is the next topic of interest.
Note that a similar formulation would apply to the other two of the three inertial systems. The result is the deterministic Hamilton-Jacobi equation for the mean state of the system, and this error naturally leads to results quite different from Aok's. There has been work with the direct numerical solution of the stochastic Hamilton-Jacobi equation.
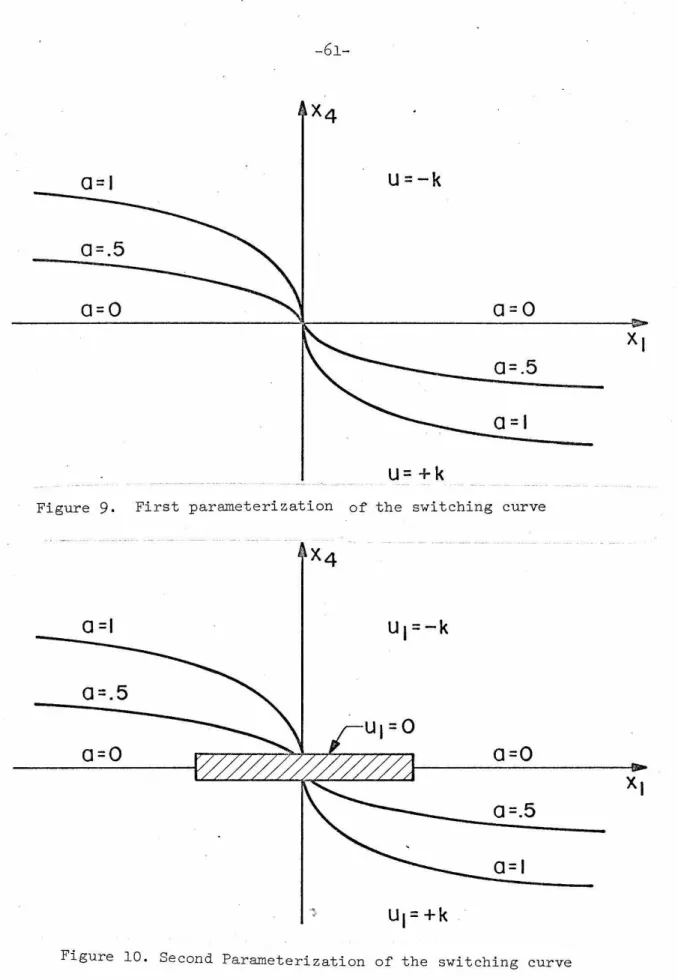
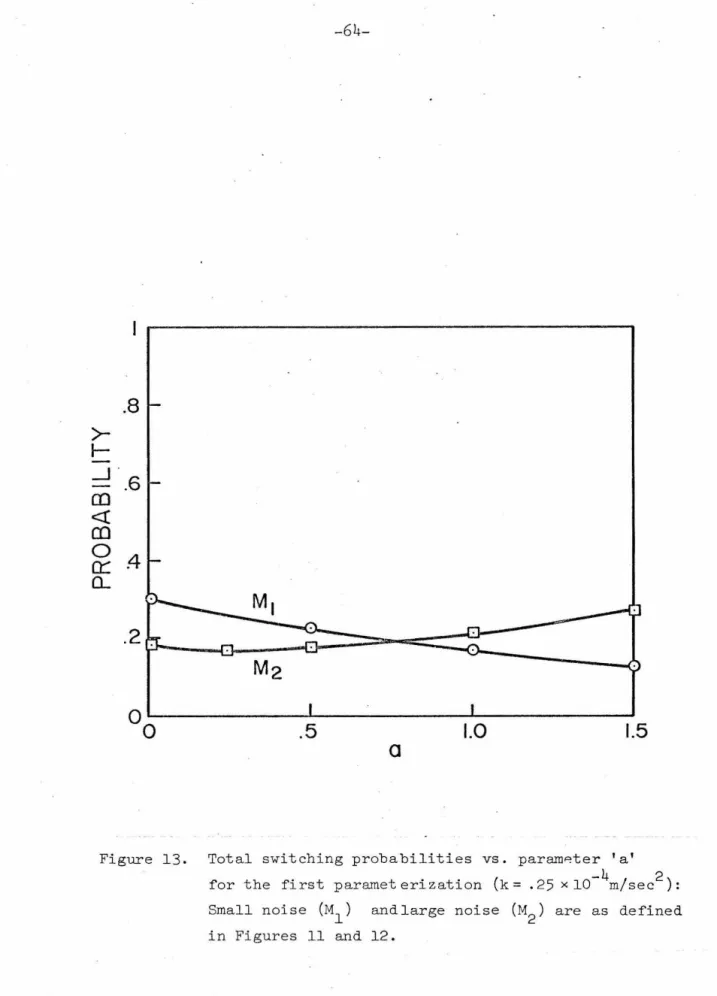
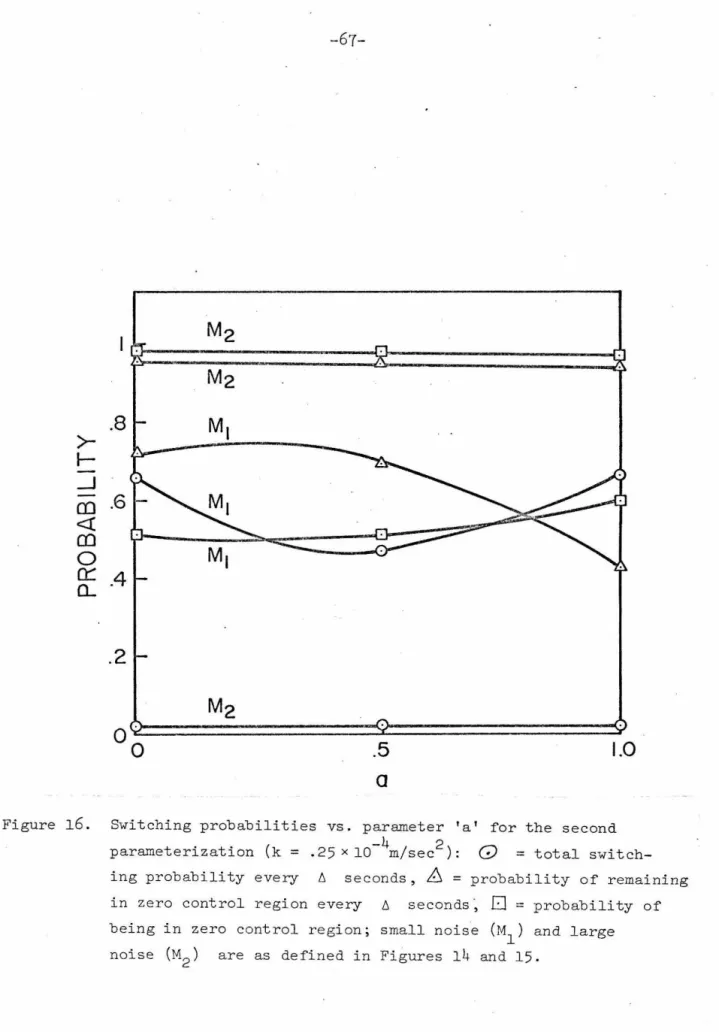
Van Mellaert (54) has done work related to the inclusion probability of a stochastic system (i.e., the probability of remaining in a given region of the state space over a specified time interval). 1(t) and is chosen parabolically based on the results of the stochastic minimum time study (see Section 3.6). For greater noise This counterclockwise swing of the shift curve (to increase noise) corresponds to.
Obviously, the approximation will become less accurate as the system state approaches the switching curve. Vli th p now in hand the solution of equation 3.11 is sought by means of the approximation-in-policy-space algorithm (59). A suitable initial guess for the value function is given by the deterministic solution of the minimum time problem.
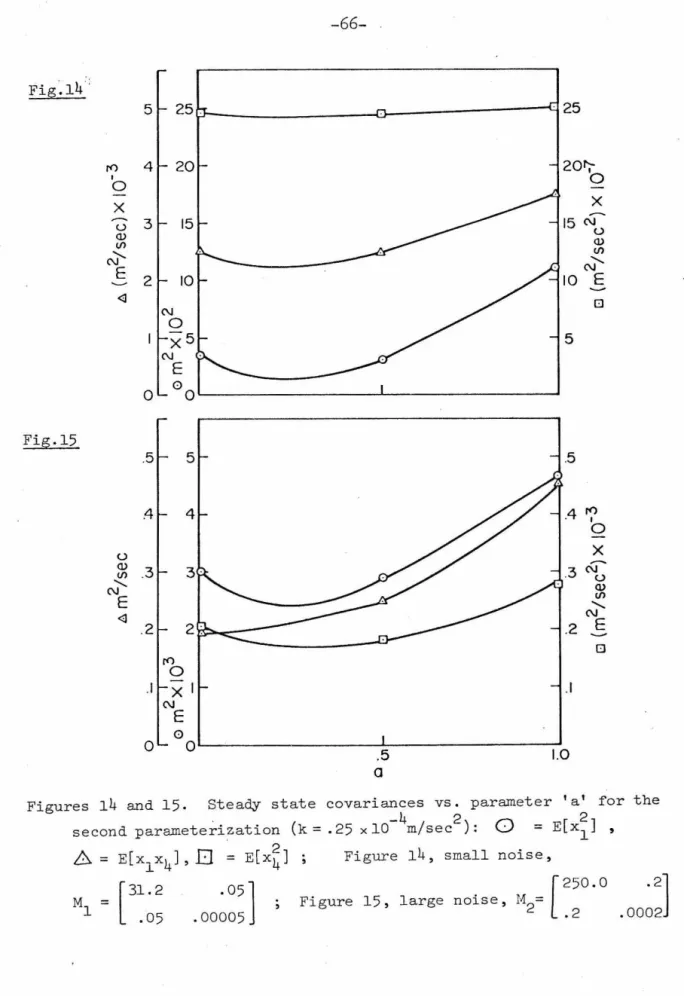
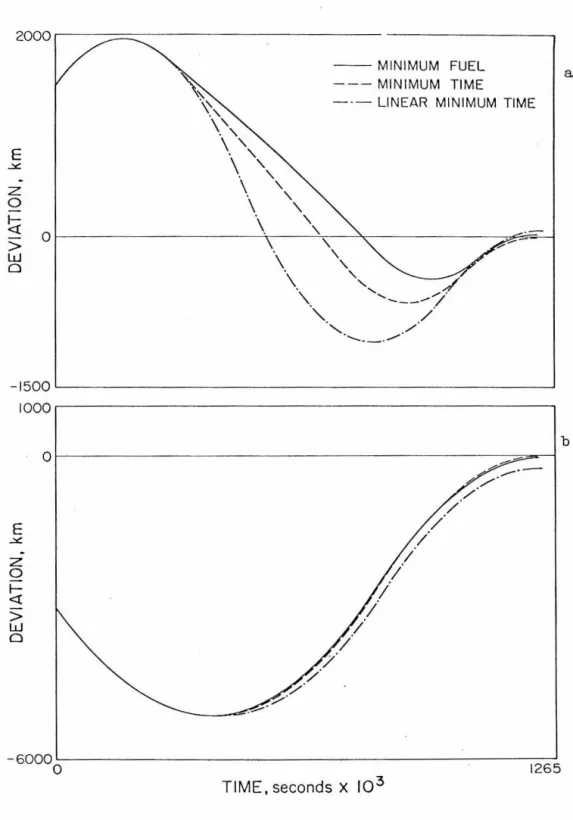
In the next section, certain aspects of the second variation and A-matrix controllers are considered. Examining the results reveals that significant steady state deviations build up using these guidance strategies. In the following discussion, the MTV controller is actually compared to a realization of the A matrix.
While making trajectory corrections, the /. matrix controller minimizes the mean square deviations of the control variations from their nominal values. In the next section, the technique of MTV control will be extended to the case where the state of the system is not exactly known, but needs to be estimated. The second term in Equation 3.69 is zero because the mean of the error process is always zero.
If the symbol P(a,t It) is used to represent the conditional probability density function of the state a at time t based on the observations up to time t, then this function can be shown (66) to satisfy a stochastic partial differential integral functional equation of the form:
CONCLUSIONS
The author feels that the main advantage of this approach was that although the. One of the primary problems in applying optimization theory to engineering problems is the specification of the system performance measure. However, considering that the Mariner mid-course guidance systems typically carried five times the onboard fuel required to correct the maximum expected initial velocity deviation, it would appear that efforts to reduce only the guidance's fuel consumption somewhat will be wasted.
Other considerations such as system accuracy, simplicity and implementation should definitely be emphasized in the specification of the final. The first attempt in this study was to make the problem formulation as realistic as possible, and only then look for a solution. There was virtually no attempt to force the problem into a form in which an analytical solution already existed, and then turn around.
Indeed, the solutions and synthesis techniques presented in this study have repeatedly relied heavily on the use of one of the most powerful design tools in modern technology, the digital computer. There is almost no doubt that the computer makes it possible to solve problems that would otherwise seem impossible. In the MTV management problem, the computer was used to its greatest advantage, but only after the mathematical development had been carried out to its fullest extent.
There are also those who claim that the differences between a deterministic design and a stochastic design are usually not very large, and therefore the additional design effort is hardly worth it. For example, it has become clear that the MTV instruction problem has no deterministic analogue; therefore a stochastic design is essential. And although the exact solution has not been reached, it has been seen that the approximate stochastic system has a lot to offer.
In this way, the results establish at least one concrete example of the practical benefits of stochastic optimal control. The solution to this problem appears to be straightforward given the identical dynamic response (ie, fully inertial) and also the built-in capability of the M'l'V control method to yield switching probabilities for each control configuration. . Equations A.3 with conditions A.2 and A.4 give a two-point boundary value problem to be solved to achieve optimal control.
APPENDIX B
Doob (64) showed that the solution of Equation 3.4 will be a Harkov process that can be defined by its transition probability density function. Irving, J., "Low-Thrust Flight: Variable Exhaust Velocity in Gravitational Fields," Space Technology, Howard Seifert (editor), . Melbourne, W.G., "Interplanetary Orbits and Payload Capabilities of Advanced Propulsion Vehicles," JPL TR 32-68, Jet Propul-.
Kelley, H.J., Denham, W.F., "Ansemble Averaging Approach to Optimal Guidance Polynomial Approximations, 11 Paper 29C, 1966 IFAC, Londër, Ing. ," Paper 66-5Tb, AIAA Second Propulsion Joint Specialists Conference, Colorado Springs, qershor 1966. Stearns, J.\v., "Electric Propulsion Requirements for Planetary and Interplanetary Space craft," JPL TR 32-403, Jet Propulsion Laboratory, Pas adena, mars 1964.
Birrell, P.J., "Control and Guidance of Electrically Propelled Spacecraft," JPL TR 32-166, Jet Propulsion Laboratory, Pasadena, september 1961. Stratonovich, R.L., "On the Theory of Optimal Control; An Asymptotic Method for Solving the Diffusive Alternativ ligning."