The methods of investigation are experimental measurements of a sample mast and numerical modeling of the mast with special attention to hysteretic joints. Two repetitions of the same bead movement within the same trial are shown.
![Figure 1.1: Artist’s depiction of the Shuttle Radar Topography mission above the earth (NASA image [33])](https://thumb-ap.123doks.com/thumbv2/123dok/10413590.0/14.918.165.810.572.869/figure-artist-depiction-shuttle-radar-topography-mission-earth.webp)
Motivation and goals
More specifically, this thesis will characterize the influence of hysteretic parts and stochastic properties on the linearity and hysteresis of a mast under transient quasi-static loading. The framework for this characterization will be applicable to a variety of mast designs beyond the particular ADAM mast of this study.
Approach
The marriage of detailed characterization of the as-is mast and extensive control over the modeled mast makes it possible to investigate which properties of the mast govern its performance. Analyzing a mast at this level of detail can create a high degree of confidence in its future behavior and focus design and manufacturing efforts on the areas of greatest impact.
Outline
This chapter begins with a literature review that addresses the many studies of lattices, collapsible columns, and joint-dominated structures, including the effects of realistic moving joints and the space environment. Important tools for laboratory and in-flight mast characterization include laser ranging and videogrammetry, and masts of varying degrees of accuracy and stiffness have also been addressed.
Analysis of trusses and deployable masts
In particular, it is noted that the cable must be prestressed to at least the maximum tension of the theoretical part it replaces. Using equivalent stiffness matrices to model the nonlinear behavior of the joint friction, a new iterative matrix model is presented.
Effects of materials and joints
They concluded that "this modeled behavior replicates not only the size of the tumors observed in the experiments, but also the rate of convergence observed in the data." Friction is a leading source of unpredictable behavior in the transition from ground to orbit.
Metrology and experimental methods
Lasers
The metrology system determines the position of the mast tip in three degrees of freedom using a set of two lasers and two position-sensitive detectors. The lasers are attached to the outer tip of the mast and aimed at detectors on the spacecraft's main bus.
Photogrammetry and videogrammetry
By reading the position of the laser dots at a speed above the mast's large natural frequencies, the metrology system will provide decisive data about the pointing of the mast at all times during observation. These corrections will enable the system to achieve a resolution that would otherwise require unusually stable pointing of the 10-m mast.
Other methods
Because the x-ray detectors record the time and impact position of each incoming photon, the reconstructed images can be corrected to account for the motion of the mast tip, even if vibrational modes of the mast are excited during observation. Greschik and Belvin [16] proposed a system of fly beams to support large structures during dynamic testing with minimal disturbance of the vibration mode shapes.
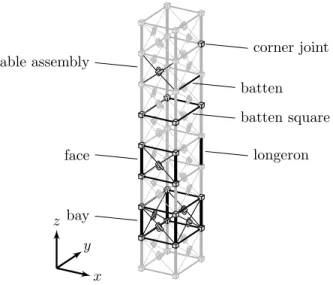
ADAM mast
Applications of ADAM
- IPEX-II
This was attributed to “the sudden release of strain energy stored in the hysteretic mechanisms and/or the materials of the structure.” [18, p. Despite this difficulty, the SRTM experiment produced a height map of 80% of the Earth's surface.
![Figure 2.11: The SRTM mast (NASA image [33]). The mast is approximately 1 m wide and 60 m long when fully deployed.](https://thumb-ap.123doks.com/thumbv2/123dok/10413590.0/34.918.296.682.90.411/figure-srtm-mast-nasa-image-approximately-fully-deployed.webp)
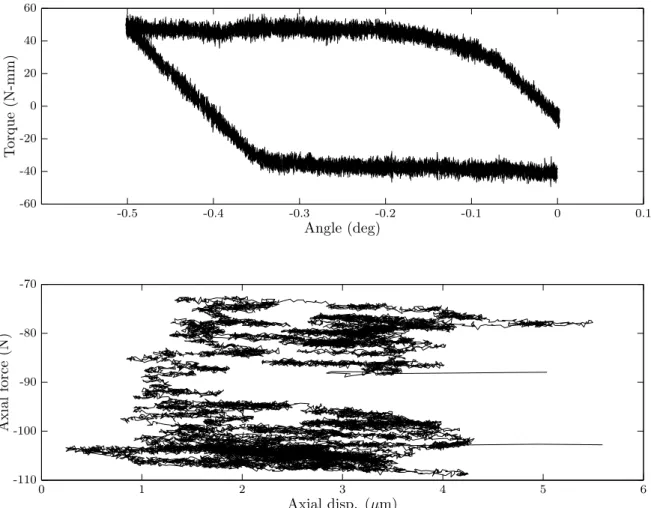
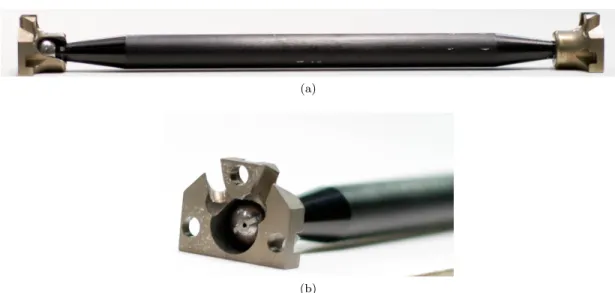
Longeron ball-end friction
Experiment
With the longer under pressure, the vertical position of the moving head was fixed and the head was rotated through 0.5◦ and back to its starting position. These were the longons of the four corners of the upper bay of the WSOA mast.
Results
Each corner was tested four times and the stringer rotated to a new position for each of the four tests. Each corner was tested three times and the stringer rotated to a new position for each of the three tests.
Cable preload
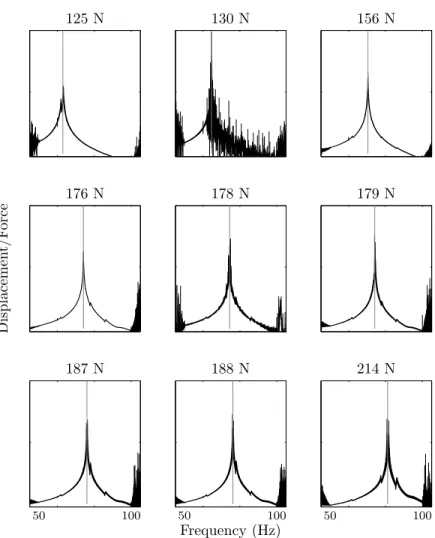
Empirical relationship between tension and vibration frequency
Instead of using the location of the maximum, the resonant frequency was determined by a weighted average. Cable voltage expansion has no clear effect on the resonant frequency of the cable assembly.
In situ measurements of cable preload
The mean standard deviation of measurements within a single side was 6 N, while the standard deviation of sixteen mean measurements was 47 N, as illustrated in Figure 3.14. Preload range is an indirect measure of the range of lengths in manufactured parts.
Latch and cable behavior
- Stiffness of cables
- Latch behavior experiment
- Analytical model of latch
- Results
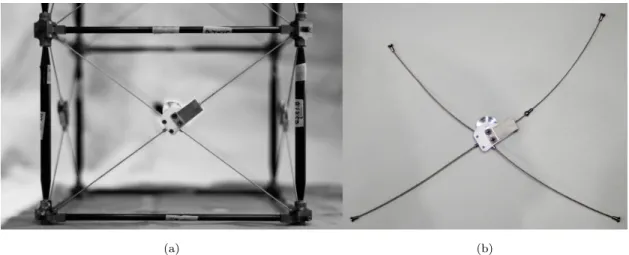
The purpose of these experiments was to identify a constitutive relationship for the locking of the shape. However, the front surface of the bead and the exact shape of the backstop are both visibly non-ideal, as shown in Figure 3.22.

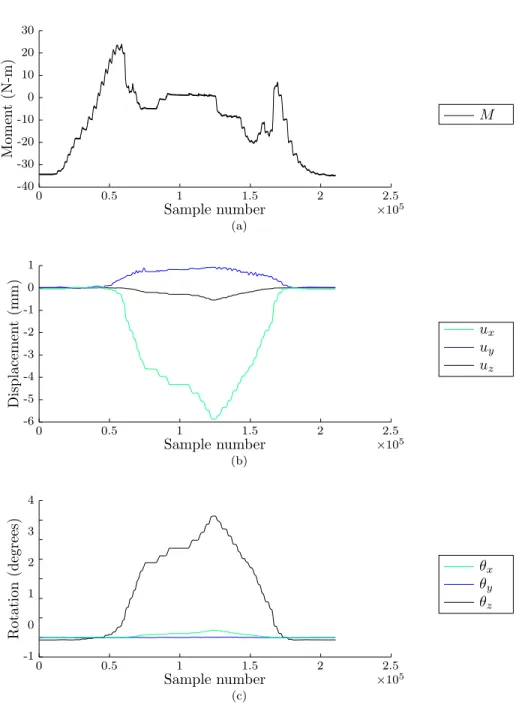
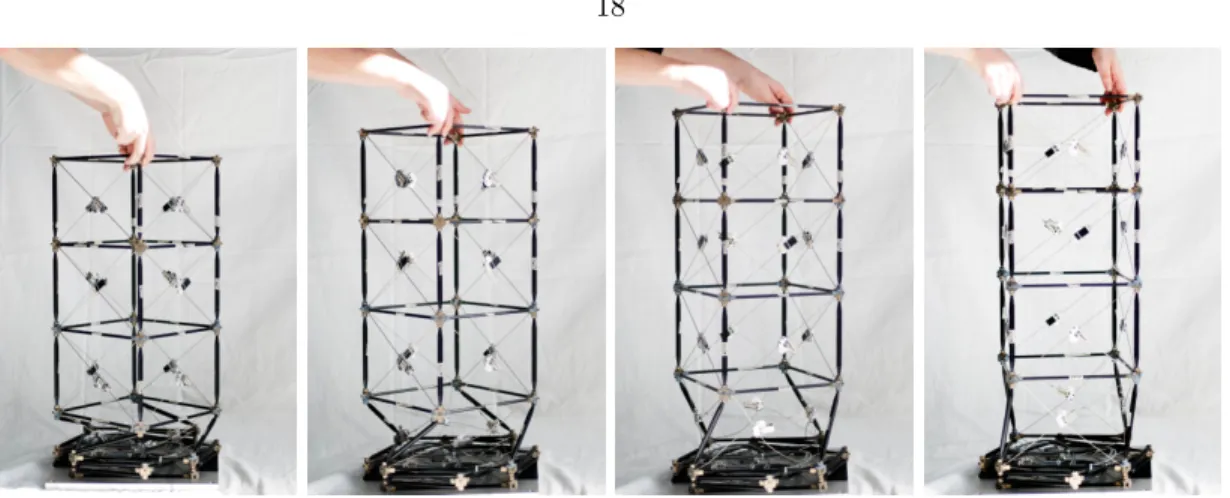
Stowage and deployment
Experiment
At approximately 3◦ rotation, three of the four latches were unlocked and the compartment no longer offered any resistance to further movement. This allowed the weighted cables to apply a deployment torque and return the bay to its original configuration.
Results
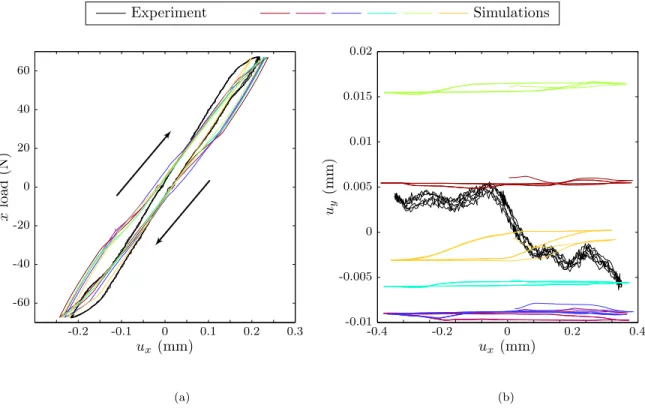
Asymmetries in the load and in the behavior of the cargo space components may be a partial reason. This figure shows the path from the node at the center of the top lat square through the displacements ux and uy in the x-y plane.
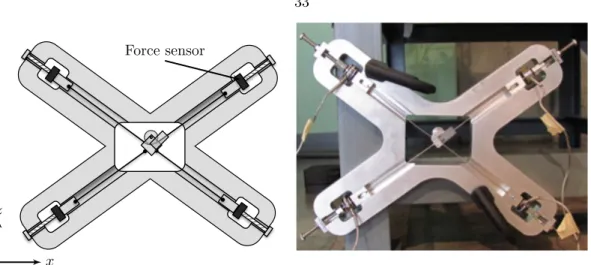
Shear loading
Experiment
Loads (of magnitude approximately 60 N) were applied in the thex-y plane through a bolt fixed in the center of an aluminum plate, which was attached to the top square joints of the plate. Displacements were measured at the top of the double-bay mast using a beam-finding laser in the same method described in Section 4.1.1.
Results
Therefore, the results for 0◦ and 180◦ should correspond to identical load cases on the mast frame, but they appear to differ, as will be discussed. The orientation of the mast was shifted by 90◦ with respect to its axis between these two data sets.
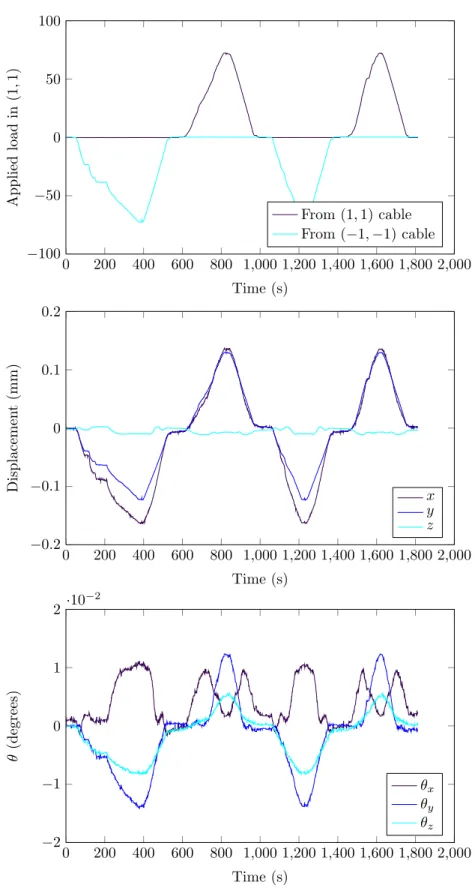
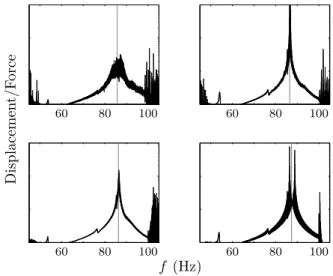
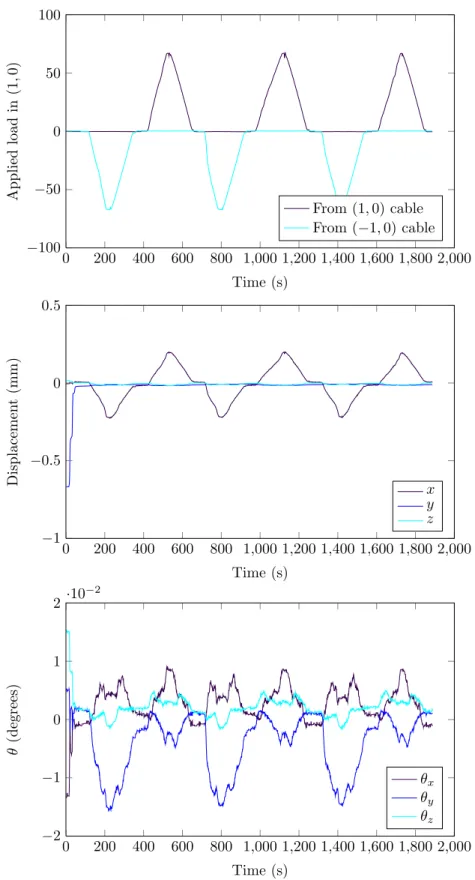
Biaxial shear loading
Experiment
The buckling that appears in the zero-load data is a spurious result that arose from the stiffness assumption of the top square of the panel, which was actually deforming out of square. The tex load cables lie in a plane 57.5 mm above the center of the top square of the panel; their charging cable is 35.5mm above the center of the top square of the panel.
Results
Standard finite elements were used for much of the structure, and are addressed here, and the most essential part of the finite element model is a user element that describes the latch, presented in detail in Section 5.2. The Matlab code, which is fundamental to managing the database of part properties and load cases, will be discussed in Section 5.3.
Basic elements
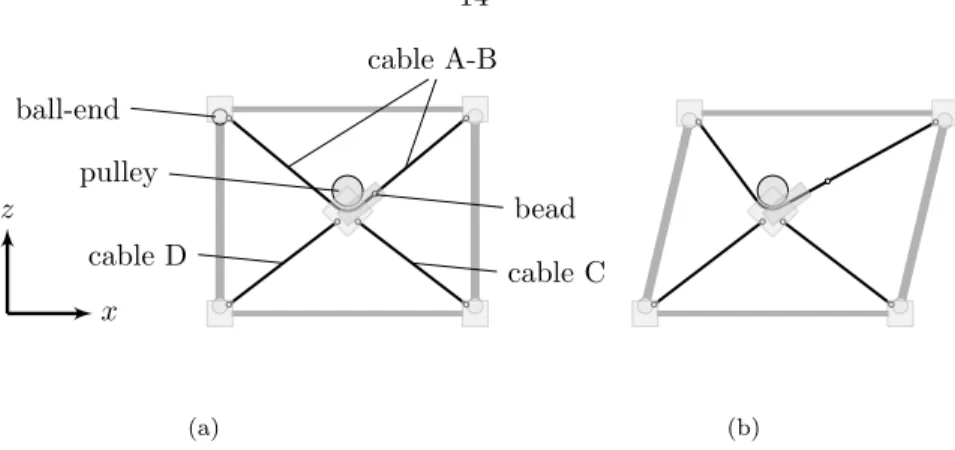
- Corner joints and pulleys
- Battens and longerons
- Ball-end joints
- Cables C and D
The rotation option is used to indicate a relationship between the orientation of the socket node and the longer end. The relationship between the normal load F and the opposite relative rotation moment of the nodes,M, is.

Latch user element
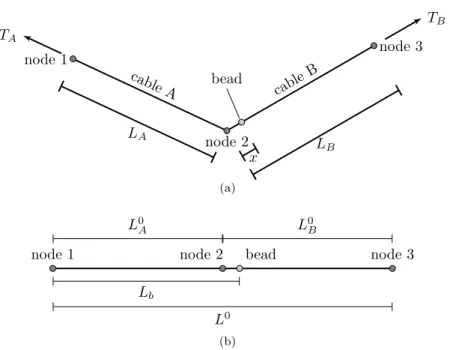
Cable systems
Here the stiffness of the cableEA, the total unstretched lengthL0 and the position of the bead connection in the cable Lb are part of the element properties. This model does not take into account pulley size, non-linear stiffness of the cables or bending stiffness in the cables.
Latch constitutive relationship
It is also convenient to enter the angle between the center line and the line through the center of the bead and the center of a roller, θ(Figure 5.3b) and note that. Now consider the two force components transmitted between the roller and bead: the normal component Fn and the tangential component |Ff| ≤ |µFn| (Figure 5.3c).
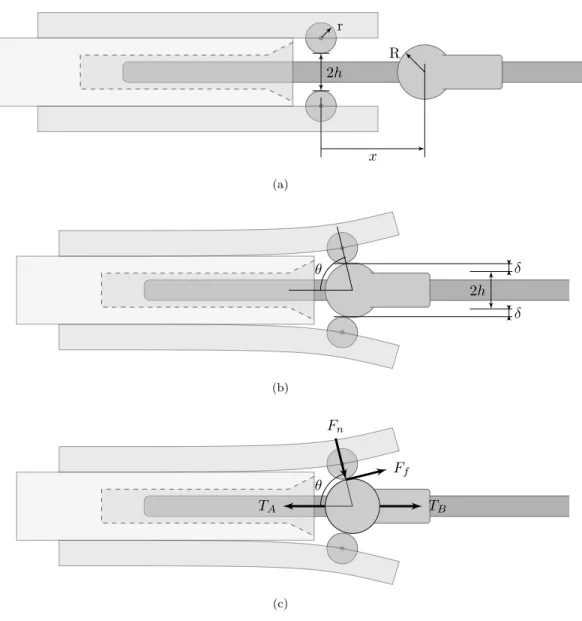
Formulation of user element
Because the bead equation ∆T = ∆T(x) is not monotone, it is important to always identify the correct solution of the latch equations. If the solution places x beyond the boundary of the zone, a solution is sought in the next zone in the direction of movement of the bead.

Model generation
Modeling stochastic variability
In this equation, Linitialij is the distance between the two end nodes at the locations where the model is first generated. 100 µm is the face-to-face variability that yields a standard deviation of approximately 50 N in cable tensions.
Initializing the mast model
The position of the masthead is represented by a control node in the center of the upper panel square. Most of the simulation cases apply to the top of the mast a shear load analogous to the experiment of Section 4.2.2.

Calibration cases
Batten stiffness
The experiment was originally intended to measure the sliding motion of the entire mast, rather than to measure the stiffness of the batten, and was only later applied to calibrate the modeled stiffness of the batten. This is the reason for the indirect nature of the measurement and the low accuracy of the results.

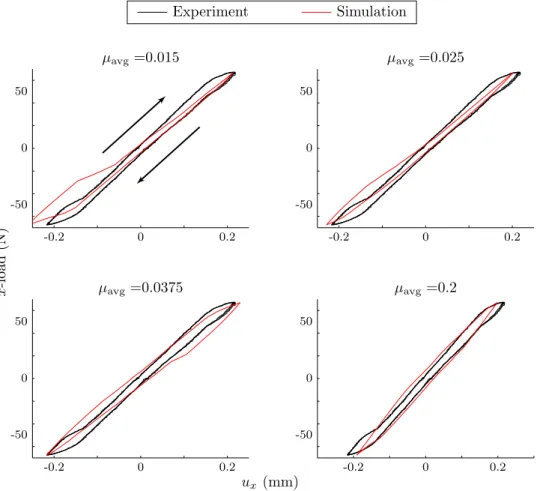
Ball-end friction
A value of µ= 0.0375 is used as the default in the remaining parametric studies, and validation cases are presented for both this value and the experimental mean of µ= 0.14. It is possible that the difference between the range of resting positions of 21µm found experimentally and the 36µm range found at this friction value actually stems from an incorrect value of the friction.
Impact of modeling practices
- Variability in ball-end friction
- Cable preload - variability
- Latch model - variability
- Measured vs. idealized latch behavior
- Geometric imperfections
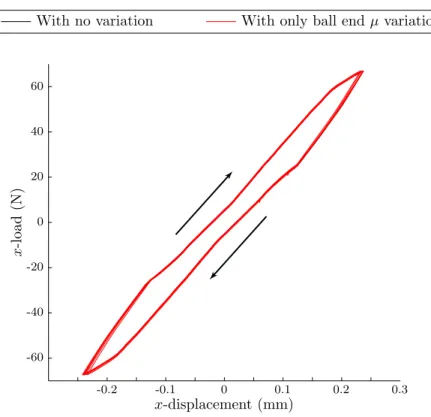
Selectively removing this variability, as shown in Figure 6.8, shows that this factor does not appear to be the cause of any particular feature in the force-displacement curve. From this we can see that variation in latches is responsible for most of the variation in this measure of behavior, for these levels of variability in each trait.
Component properties
Longeron stiffness
Cable stiffness
The stiffness is considered to be the average of the loading and unloading slopes ∆xload/∆ux. It is quite clear, compared to Figures 6.12 and 6.13, that the shear response is dominated by the cable stiffness rather than the longer stiffness.
Mean cable preload
The four corner joints of the base were fully constrained in all size degrees of freedom with the *BOUNDARY command. In all cases, the simulation load or displacement condition was applied to the control node.
Torsional motion
Three models generated with independent stochastic component properties are included in (a), while a single model is run through multiple rotation loops in (b). Four models generated with independent stochastic component properties are included in (a), while a single model is run through multiple rotation loops in (b).

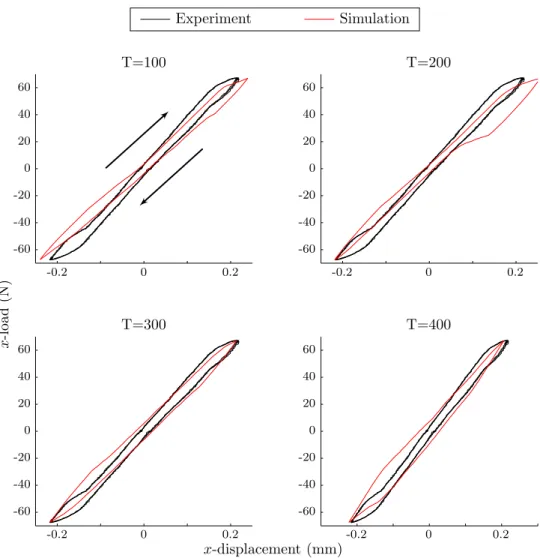
Shear loading
The most significant point of agreement between experiment and model is that the displacement curve shows none of the distortions associated with decoupling. In this load case, the model correctly predicts that the beads rest against the abutments and do not produce the characteristic broadening of the force-displacement curve seen when the closures begin to detach.
Biaxial shear loading
The behavior of the mast was mainly characterized by the resting range of the unloaded mast after transient quasi-static shear loading. The initial position of the face corresponding to the zero reading of the laser is known.
Mast generation pseudocode
At this point, there is a comprehensive solution to the current state of the latch and cable. C The reaction force is the magnitude of the tension in the C direction of the cable.
![Figure 2.12: Artist’s image of NuSTAR, with the optics at left and detectors/spacecraft bus at right (NASA image [5]).](https://thumb-ap.123doks.com/thumbv2/123dok/10413590.0/34.918.227.745.808.990/figure-artist-image-nustar-optics-detectors-spacecraft-right.webp)