PENDAHULUAN
Latar Belakang
Rumusan Masalah
Batasan Masalah
Tujuan Penelitian
Manfaat Penelitian
Berdasarkan latar belakang diatas, maka rumusan masalah yang akan dijadikan bahan penelitian adalah Bagaimana Merancang Hardware dan Software Side Slip Tester Akurat Berbasis Android Menggunakan Metode Filter Eksponensial. Membantu penguji memfasilitasi kinerja pengujian kendaraan bermotor secara berkala dengan hasil yang akurat dan tepat serta hasil pengujian yang terdokumentasi dengan baik.
Keaslian Penelitian
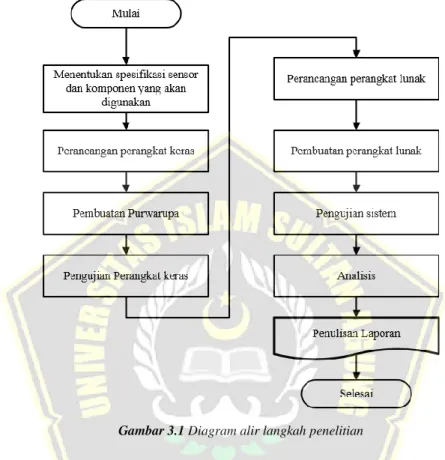
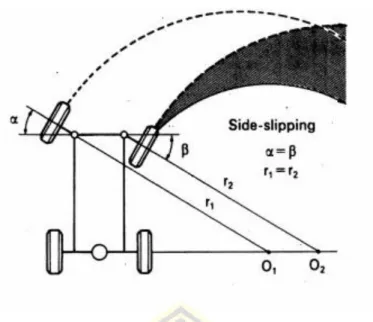
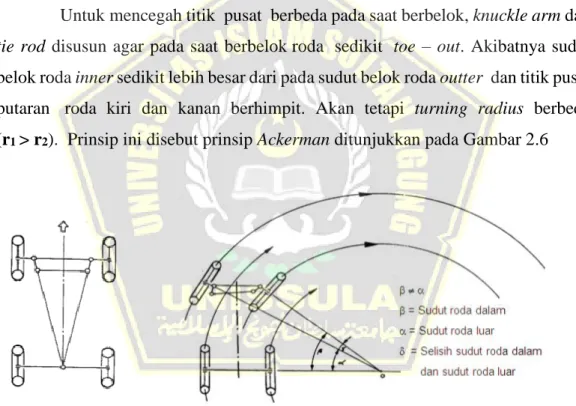
Akibatnya kendaraan tidak bisa berbelok dengan mulus akibat terjadinya side slip pada roda, seperti terlihat pada Gambar 2.5. Dengan performa tinggi, kode sederhana, konsumsi daya rendah dan ukuran kecil, seperti ditunjukkan pada Gambar 2.8 [26], ukuran IC kurang dari 1 cm. STM32 merupakan mikrokontroler dengan arsitektur prosesor RISC 32-bit yang dikembangkan oleh Advanced RISC Machine (ARM) dengan seri Cortex-M, yang dapat digunakan untuk membuat berbagai sistem tertanam. Berdasarkan Gambar 3.1, tahap pertama penelitian ini adalah menentukan spesifikasi sensor dan komponen yang akan digunakan sesuai dengan sidelip bench yang akan digunakan untuk pengujian kendaraan. Setelah komponen yang sesuai diperoleh, desain perangkat keras dibuat. Setelah dilakukan, desain ini digunakan untuk membuat prototipe perangkat keras. setelah prototype dibuat dilakukan pengujian untuk memastikan kesesuaiannya, apabila kurang sesuai maka dilakukan penyempurnaan kembali, setelah prototype hardware cocok maka dilakukan perancangan software atau grafis antarmuka pengguna untuk memudahkan pengguna dalam penggunaannya. penggunaan alat uji. Setelah perancangan perangkat lunak selesai dilakukan pengujian dengan menggunakan perangkat keras sehingga dapat berkomunikasi dan menampilkan data hasil.
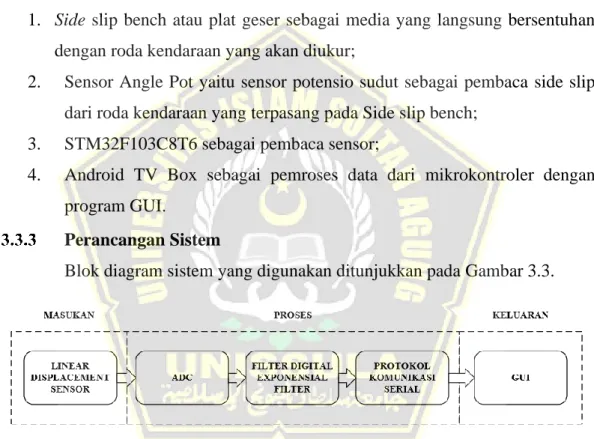
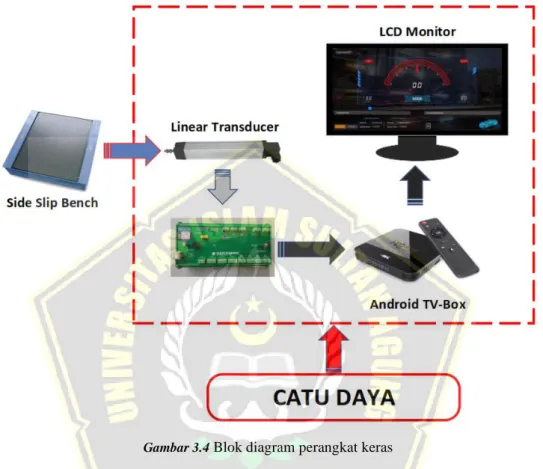
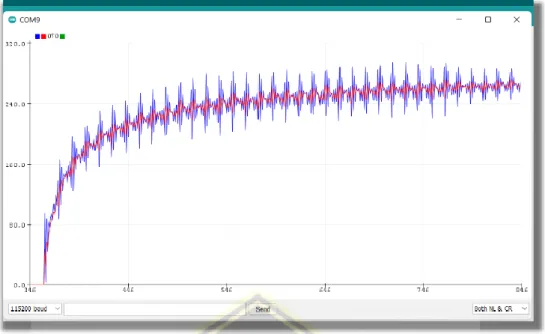
Bangku geser samping atau skid plate sebagai alat yang bersentuhan langsung dengan roda kendaraan yang akan diukur; Pada Gambar 3.4, sistem terdiri dari bangku samping geser atau skid plate yang dipasang di dalam transduser linier untuk membaca slip samping roda kendaraan yang akan diuji, kemudian sinyal dari sensor akan diubah menjadi data digital menggunakan ADC dari ST32F103C8T6 yang akan diproses oleh program GUI android. Pada Gambar 4.7 hasil filtering sinyal ADC dengan filter eksponensial tertimbang a=0.5, garis biru merupakan sinyal ADC sebelum difilter, dan garis merah merupakan output setelah difilter.
Pada Gambar 4.8 hasil filtering sinyal ADC dengan bobot pada filter eksponensial a=0.4, hasil filteringnya hampir sama dengan Gambar 4.7. Pada gambar 4.8 terlihat hasil filtering tidak jauh berbeda dengan sinyal masukan. Pada Gambar 4.10, dengan bobot filter eksponensial 0,2, penyaringan noise sangat baik dan lancar, respon terhadap sinyal input di awal waktu juga sangat cepat. Pada Gambar 4.11 dengan bobot a=0.1 pada filter eksponensial, hasil penyaringan terhadap noise sangat halus, namun respon awal terhadap pembacaan sinyal sangat lambat.
Pada Gambar 4.12 terlihat garis berwarna hijau dengan bobot pada filter eksponensial sebesar 0,01, hasil filter sangat halus namun respon sangat lambat.
![Gambar 2.1 Side Slip roda depan hanya karena toe-in dan toe-out tanpa camber[14]](https://thumb-ap.123doks.com/thumbv2/123dok/11266743.0/19.892.166.766.482.1027/gambar-side-slip-depan-hanya-karena-tanpa-camber.webp)
TINJAUAN PUSTAKA
Tinjauan Pustaka
Landasan Teori
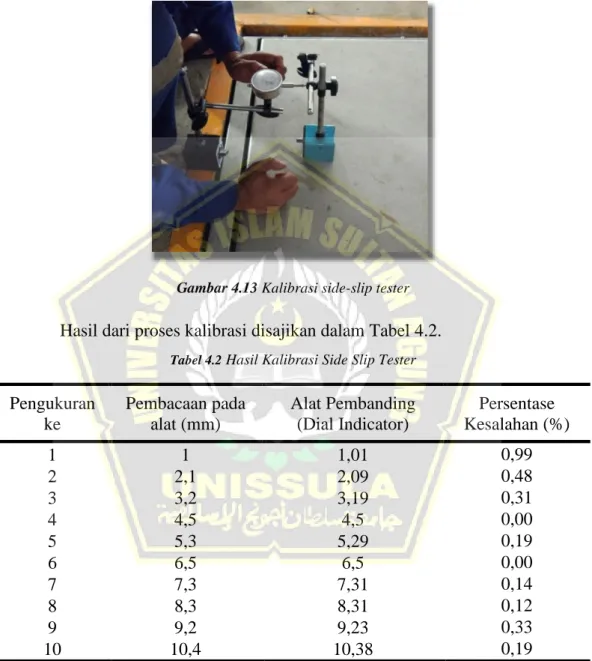
Kalibrasi sidelip tester dilakukan dengan cara membandingkan langsung hasil pembacaan alat dengan dial indikator yang telah dikalibrasi.
METODOLOGI PENELITIAN
Langkah-langkah Penelitian
Model Penelitian
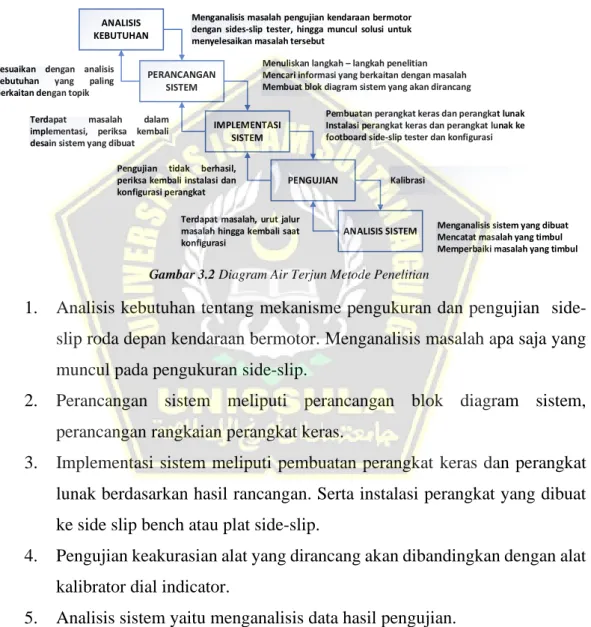
Penelitian ini menggunakan metode penelitian dan pengembangan sehingga menghasilkan produk alat uji selip samping dengan sistem pintar untuk kendaraan bermotor yang akurat dan tepat. ANALISIS SISTEM Menganalisis permasalahan pengujian kendaraan bermotor dengan sidelip tester hingga muncul solusi dari permasalahan tersebut. Tuliskan langkah-langkah penelitiannya. Carilah informasi yang berkaitan dengan masalah. Buatlah diagram blok dari sistem yang ingin dirancang.
Fabrikasi perangkat keras dan perangkat lunak Pemasangan perangkat keras dan perangkat lunak pada tumpuan sidelip tester dan konfigurasinya. Analisis sistem yang dibuat. Catat setiap permasalahan yang muncul. Perbaiki masalah yang muncul. Sesuaikan dengan analisis.
Alat dan Bahan Penelitian
E_jenis.Text=jenis_mobil(0) TStartDef(0)=PanT_Start.Left TStartDef(1)=PanT_Start.Top TResetDef(0)=PanT_Reset.Left TResetDef(1)=PanT_Reset.Top TPrintPrintDef(PrintDef_T) 1)=PanT_Print.Top TInputDef(0)=PanT_InpuData.Left TInputDef(1)=PanT_InpuData.Top If First Then. Printer1.WriteString(nilai_Result.Text&" mm/m"&CRLF) Printer1.WriteString(Ket_Result.Text&CRLF).
HASIL DAN PEMBAHASAN
Hasil Rancangan Perangkat Keras
Setelah perancangan perangkat keras selesai, dilakukan pemesanan papan sirkuit cetak (PRT) dan pemasangan komponen pada PRT, sehingga diperoleh hasil perangkat keras seperti pada Gambar 4.1.
Hasil Rancangan Antarmuka Pengguna Grafis
Pertama, operator menekan tombol start untuk mengaktifkan pengukuran, kemudian operator menginstruksikan pemilik kendaraan untuk melewati side slide dengan kecepatan 5-10 km/jam dan harus melepaskan kemudi. Ketika roda kendaraan melewati side skid maka sensor akan membaca side skid dari roda kendaraan dan menampilkannya pada layar monitor.

Pengujian Mikrokontroler
Proses pengujian dilakukan dengan membuat lampu program berkedip-kedip kemudian program dikompilasi untuk memastikan program yang dihasilkan benar dan bebas dari kesalahan. Setelah program benar, langkah selanjutnya adalah memuat program ke dalam mikrokontroler, pemuatan program dilakukan menggunakan modul STLink. Dari hasil pengujian dapat disimpulkan bahwa rangkaian mikrokontroler berfungsi dengan baik dan sesuai rancangan.
Pengujian Filter Eksponensial
Hal ini mempengaruhi pembacaan sinyal ADC karena pembacaan input ADC dalam waktu singkat. Dari grafik hasil pengujian filter eksponensial, semakin kecil nilai bobot a maka hasil yang muncul akan semakin halus, namun respon terhadap sinyal masukan semakin lambat. Oleh karena itu, bobot yang diterapkan pada alat uji sidelip dipilih dengan bobot 0,2.
Oleh karena itu, grafik menunjukkan bahwa respon terhadap sinyal input cepat dan penyaringan noise sangat baik.
Kalibrasi Pengukuran Side-Slip
Private Gauge_V As ImageView Private L_Gauge As Label Private EditText1 As EditText Private SeekBar1 As SeekBar Private Caranimasi As ImageView. Private DevSer_State As Label Private DevSerBaudRate As Label Private LPrinterSerialState As Label Private LPrinterSerialBaudR As Label Private L_state As Label. Zasebno E_Sumbu As EditText Zasebno E_uji Kot EditText Zasebno E_Nama Kot EditText Zasebno E_Kend Kot EditText Zasebno E_jenis Kot EditText Zasebno E_merk Kot EditText Zasebno Save_BT Kot Gumb Zasebno B_Metu Kot Gumb Zasebno PanelMenu Kot Panel Zasebno PanT_Start Kot Panel Zasebno PanT_Reset As Panel Private PanT_Print As Panel Private PanT_InpuData As Panel Private Panel_Standby As Panel Private Panel_Gauge As Panel Private Panel_Stop As Panel Private T_Stop As Button Private L_start As Label Private L_Reset As Label Private L_Print As Label Private L_InputData As Label Private v_no_uji As Label Private v_no_kend Kot Label Private v_merk As Label Private v_jenis As Label .
Private v_jumla_sumbu As Label Private v_nama_penguji As Label Private b_change_jenis As Button Private nilai_Result As Label Private ket_kondisi As Label Private Ket_Result As Label Private LButtonPress As Label Private meterResult As ImageView End Sub . If(xgvalue>5) And (xgvalue<=16) Then Level_Right.Bitmap=ImageL4.Bitmap 'L_state.TextColor=Colors.Red. Sub PanT_Start_Touch (Action As Int, X As Float, Y As Float) PanT_Start.Left=TSStartDef(0)-10.
PanT_Start.Top=TSStartDef(1)-10 PanT_Reset.Left=TResetDef(0) PanT_Reset.Top=TResetDef(1) PanT_Print.Left=TPrintDef(0) PanT_Print.Top=TPrintDef(1) PanT_InpuLefData. PanT_InpuData.Top=TInputDef(1) End Sub. Sub PanT_Reset_Touch (Handling Som Int, X Som Float, Y Som Float) PanT_Reset.Left=TResetDef(0)-10. PanT_Reset.Top=TResetDef(1)-10 PanT_Start.Left=TSStartDef(0) PanT_Start.Top=TSStartDef(1) PanT_Print.Left=TPrintDef(0) PanT_Print.Top=TPrintDef(1) PanT_InpuLefData. PanT_InpuData.Top=TInputDef(1) End Sub.
PanT_Print.Top=TPrintDef(1)-10 PanT_Reset.Left=TResetDef(0) PanT_Reset.Top=TResetDef(1) PanT_Start.Left=TSartDef(0) PanT_Start.Top=TSartDef(1) PanT_InpuData.Left=TInputDef(0) PanT_InpuData.Top=TInputDef(1) End sub. Sub PanT_InpuData_Touch (Action as Int, X as float, Y as float) PanT_InpuData.Left=TInputDef(0)-10. PanT_Start.Top=TStartDef(1) PanT_Reset.Left=TResetDef(0) PanT_Reset.Top=TResetDef(1) PanT_Print.Left=TPrintDef(0) PanT_Print.Top=TPrintDef(1) End sub.
KESIMPULAN
Kesimpulan
Saran
![Tabel 2.2 Spesifikasi Android TV Box H96 Mini[31] ........................................](https://thumb-ap.123doks.com/thumbv2/123dok/11266743.0/9.892.229.677.464.890/tabel-spesifikasi-android-tv-box-h96-mini-31.webp)
![Gambar 2.3 Step Response pada exponential filter [15]](https://thumb-ap.123doks.com/thumbv2/123dok/11266743.0/21.892.240.707.205.460/gambar-2-step-response-pada-exponential-filter-15.webp)
![Gambar 2.4 Dinamika Roda [18]](https://thumb-ap.123doks.com/thumbv2/123dok/11266743.0/23.892.186.715.596.949/gambar-2-4-dinamika-roda-18.webp)
![Tabel 2.2 Spesifikasi Android TV Box H96 Mini[27]](https://thumb-ap.123doks.com/thumbv2/123dok/11266743.0/32.892.166.767.500.889/tabel-spesifikasi-android-tv-box-h96-mini-27.webp)