After providing detailed descriptions of the fundamentals of Computed Tomography, Frames/Wavelets, and Compressive Sensing Theory, the report proposes a TV-norm-based method for Tomography reconstruction.
History
X ray CT
Beer’s law and the X-ray/Radon transforms
- Beer’s law
- X-ray and Radon transforms
- Parameterization of X-ray transform
- Sinograms
Suppose that the initial intensity of the beam is I0, the terminal intensity is I1, and I(x) is the intensity of the beam at a location x, then the Beer's law condition - the relatively infinitesimal drop in intensity at a distance Mx from location x must be proportional to the distance traveled. Letf(X) =f(x, y) be the compactly supported and continuous function on R2. The X-ray (radon) transform Rf is a function defined in the space of lines (l) in R2 by the line integral along each such line. where ds is the measure of the arc length along line l. In medical imaging, these lines are representative of the trajectories of X-ray beams entering a body.
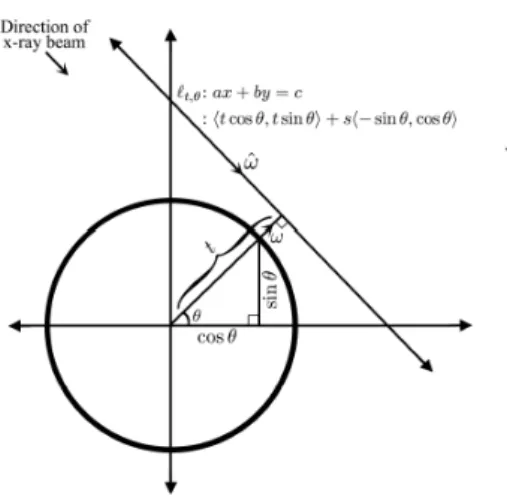
Let t be the distance from the origin to the line ax+by = c along the angle θ. Then the line can also be described as the set of solutions (x, y) of the inner product. Note that our definitions of t and θ also give us the point on the line (tcosθ;tsinθ) where the line at angle θ intersects ax+by =c.
This intersection is a right angle because while the slope of the line is ax+by =c −ab , the tangent θ is the same. Let the vectorω =hcosθ,sinθi be perpendicular to lineax+by =c and let the vectorω⊥ = (−sinθ,cosθ) be perpendicular to this line. Therefore, we can create a vector equation in terms of t and θ for the line, .
Properties of X-ray(=Radon) transform in two dimensions
- Shift invariance
- Rotation invariance
- Dilation invariance
- Relation with the Fourier transform: Projection- theorem 11
Let a ∈ R2 and let Taf(x) := f(x+a) be the corresponding displacement operator acting on the function on the plane. This property has a simple geometric meaning; instead of integrating the function over the rotated line, we can integrate the corresponding rotated function along the original line. The following statement (called the projection, Fourier, or central formula) is indeed central to the study of X-ray and Radon transforms.
Fourier's theorem states that by taking a 1D Fourier transform of the Radon transform Rf of f on the plane, one recovers the 2D Fourier transform of f. We denote Ω as the unit disk in R2 centered at the origin and assume that the function is supported inside Ω. Geometrically, to get the value of R#g at a point x, you must choose a line through x, which implies that the parameter of this line is (x.ω, ω); and then average over all lines through x.
As a result, we get a grid of lines, the density of which can be understood as R#g.
Inversion
When the information acquisition process is linear, the problem is limited to solving a linear system of equations. In mathematical terms, the observed data y∈Rm is connected to the signal x∈RM of interest via. The matrix Φ∈ Rm×M models the linear measurement process (conventionally referred to as dictionary), the vector y∈Rm is the measurement vector.
However, in many applications it is much more desirable to take fewer measurements, provided one can still recover the signal. In particular, when m < M, the linear system Φx = y is typically underdetermined and generally has infinitely many solutions. In this case, an interesting question arises: "is it still possible to recover x with fewer non-zero components of y by means of a computationally tractable procedure.
For example, if the sensing waveforms are Dirac delta functions, then it is a vector of sampled values of x in the time or space domain. If the sensing waveforms are indicative functions of the pixels, then y is the image data typically collected by the sensors in a digital camera. If the sensing waveforms are sinusoidal, then y is a vector of Fourier coefficients and this mode is used in Magnetic Resonance Imaging (MRI).
However, if the sense waveforms have 0 and 1 (or 0 and ±1) as elements, then the associated matrix (conventionally referred to as the sense matrix) may have potential applications for dimension reduction without multipliers.
Mathematics of Compressed Sensing
Greedy Methods
Orthogonal Matching Pursuite
Basis is one of the most important concepts in a study of vector spaces, which allows us to write each element of the vector space as the linear combination of the elements of the basis. But we have the additional condition that the elements of the basis must be linearly independent. Frame for a vector space equipped with an inner product also allows each element of the space to be written as a linear combination of the elements of the frame. In the thesis, we mainly study frames in finite-dimensional inner-product spaces.
Consequently, each f ∈V has a unique representation in terms of elements of the base, i.e. there exists a unique set of scalars {ck}mk=1 such that. Then S=AI (here I is the identity operator on V) and. 3.9) For general frames, we now prove that we still have a representation of every f ∈V of the form f. The second part of the following theorem, which is one of the important results in frames, is called frame decomposition.
In case the inverse does not exist, it is convenient to search for "generalized inverses" which can satisfy some of the good properties of the inverse. E is not necessarily injective, but by restricting E to the orthogonal complement of the NE kernel, we obtain the injective linear map,. We only have to prove that if a matrix E† satisfies conditions (i) and (ii) of the proposition, then it satisfies the requirements in the definition of the pseudo-inverse.
Under certain constraints on the mother wavelet ψ, all information about the transformed signal is preserved when the wavelet transform is sampled at certain discrete subsets of the time-frequency plane. More precisely, the values of the continuous transformation at these points are the coefficients of a. 4.3) Letwj,k represent the values of the CWT, the wave coefficients, at the coordinates (2−jk,2−j) representing a dyadic grid in the time scale plane.
This sampling holds enough information to allow a perfect reconstruction of the signal if certain special conditions on the wavelet function are met. In other words, W f = {hf, fki}mk=1 is a vector of the coefficients which are the inner products of f and fk, and WTc = Pm. An example of a wave-tight frame is the so-called piecewise linear B-spline frame. The associated filters are.
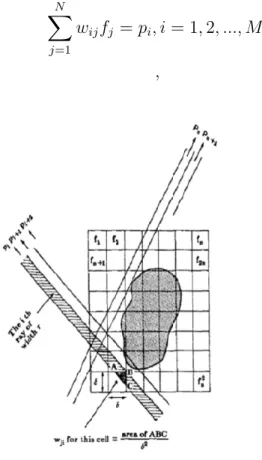
The wij factor is equal to the fractional area of the jth image cell that is intercepted by the ith ray, as shown for one of the cells in Figure 2. Here we can point out that most wij are equal to zero, since only a small number of cells contribute to any given the sum of the rays. For these values of M and N, the size of the A matrix becomes 65,000 X 65,000, ruling out any possibility of direct matrix inversion.
As can be seen from equation (5.9), the minimization objective is no longer the TV norm of image, but the summation of 1D TV of a series of parallel lines.