Solving PDEs in Python The FEniCS Tutorial I
Teks penuh
Gambar
Dokumen terkait
To determine the value of the deflection and rotation angle, modeling was undertaken using finite element method approach and then compare with filed measurement using running
Since the solution of the finite element method depends on the mesh shape and boundary condition constraints are difficult to apply in the mesh free method, the combined wavelet
Extended finite element method for simulating the mechanical behavior of multiple random holes and inclusions in functionally graded material Kim Bang Tran, The Huy Tran, Quoc Tinh
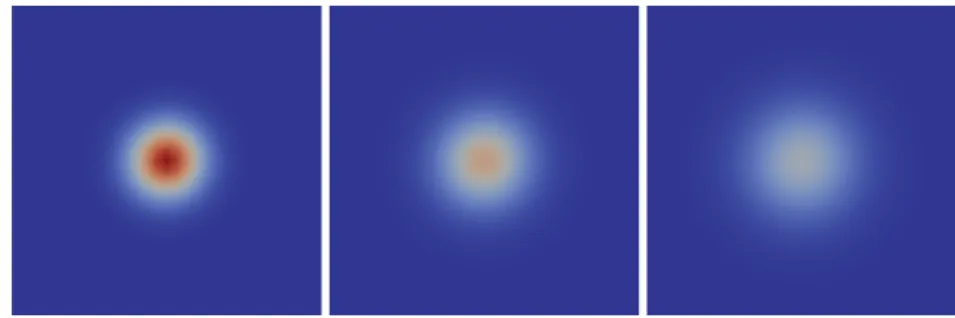
Results for the Gauss pulse test withθ=0:5 from SATFAT are more accurate than those developed by Truscott and Turner [9] using a control volume finite element method, and compare
Assessing the accuracy of a finite element code in solving the advection-diffusion equation using the Gauss Pulse Test Proceedings of the 14th Australasian Fluid Mechanics Conference,
