ĐẠI HỌC QUỐC GIA HÀ NỘI TRƯỜNG ĐẠI HỌC CÔNG NGHỆ
PHẠM QUANG HIỂN
NGHIÊN CỨU PHƯƠNG PHÁP TRÍCH XUẤT ĐẶC TRƯNG TRÊN ẢNH VỆ TINH SỬ DỤNG CÁC KỸ THUẬT HỌC SÂU
LUẬN VĂN THẠC SĨ CÔNG NGHỆ THÔNG TIN
Hà Nội, 10/2020
ĐẠI HỌC QUỐC GIA HÀ NỘI TRƯỜNG ĐẠI HỌC CÔNG NGHỆ
PHẠM QUANG HIỂN
NGHIÊN CỨU PHƯƠNG PHÁP TRÍCH XUẤT ĐẶC TRƯNG TRÊN ẢNH VỆ TINH SỬ DỤNG CÁC KỸ THUẬT HỌC SÂU
Ngành: Công nghệ Thông tin
Chuyên ngành: Kỹ thuật Phần mềm Mã số: 8480103.01
LUẬN VĂN THẠC SĨ CÔNG NGHỆ THÔNG TIN
NGƯỜI HƯỚNG DẪN KHOA HỌC 1. TS LÊ HỒNG ANH
2. PSG.TS TRƯƠNG NINH THUẬN
Hà Nội, 10/2020
LỜI CẢM ƠN
Đầu tiên, tôi xin bày tỏ lòng cảm ơn chân thành và sâu sắc nhất đến TS Lê Hồng Anh và PGS.TS Trương Ninh Thuận vì sự hướng dẫn và chỉ bảo tận tình của hai thầy trong suốt quá trình em theo học cũng như làm luận văn tốt nghiệp.
Những định hướng, những lời khuyên và những kiến thức vô cùng quý giá của hai Thầy đã giúp em rất nhiều trong quá trình hoàn thành luận văn tốt nghiệp.
Tôi xin được gửi lời cảm ơn sâu sắc nhất tới các Thầy Cô trong khoa Công nghệ thông tin - trường Đại học Công Nghệ - Đại học Quốc gia Hà Nội nói chung cũng như các thầy cô trong bộ môn Công nghệ Phần mềm nói riêng đã tận tình giảng dạy, trang bị cho tôi những kiến thức quý báu trong suốt quá trình tôi học tập tại khoa. Đây cũng chính là tiền đề giúp tôi hoàn thiện luận văn thạc sỹ.
Cuối cùng, tôi cũng xin được gửi lời cảm ơn chân thành đến các anh chị em đồng nghiệp cũng như gia đình, bạn bè, người thân đã giúp đỡ tôi cả về vật chất lẫn tinh thần để tôi hoàn thành được luận văn này.
Mặc dù đã rất cố gắng nhưng luận văn chắc chắn không tránh khỏi những thiếu sót, tôi rất mong nhận được những ý kiến nhận xét và đánh giá từ phía các Thầy Cô để luận văn được hoàn thiện hơn.
Tôi xin chân thành cảm ơn!
Hà Nội, tháng 10 năm 2020 Học viên
Phạm Quang Hiển
LỜI CAM ĐOAN
Tôi xin cam đoan luận văn “Nghiên cứu phương pháp trích xuất đặc trưng trên ảnh vệ tinh sử dụng các kỹ thuật học sâu” được thực hiện dưới sự hướng dẫn của TS Lê Hồng Anh và PGS.TS Trương Ninh Thuận. Tham khảo từ những nghiên cứu liên quan đều được trích dẫn một cách rõ ràng trong danh mục tài liệu tham khảo. Không có việc sao chép tài liệu, công trình nghiên cứu của người khác mà không chỉ rõ về tài liệu tham khảo.
MỤC LỤC
LỜI CAM ĐOAN ... 2
MỤC LỤC ... 3
DANH MỤC CÁC KÝ HIỆU VÀ CHỮ VIẾT TẮT ... 4
DANH MỤC CÁC BẢNG ... 5
DANH MỤC CÁC HÌNH VẼ, ĐỒ THỊ ... 6
CHƯƠNG 1. GIỚI THIỆU ... 1
1.1. Tính cấp thiết và lý do chọn đề tài ... 1
1.2. Mục tiêu và phạm vi nghiên cứu ... 2
1.3. Nội dung nghiên cứu ... 3
1.4. Cấu trúc luận văn ... 4
CHƯƠNG 2. CÁC KIẾN THỨC VÀ CÔNG NGHỆ NỀN TẢNG ... 5
2.1. Ảnh vệ tinh Sentinel-2 ... 5
2.2.1. Thiết kế kỹ thuật của vệ tinh Sentinel-2 ... 5
2.2.2. Thiết kế kỹ thuật bộ cảm MSI trên vệ tinh Sentinel-2 ... 6
2.2.3. Thiết kế khả năng lấy mẫu của bộ cảm quang phổ MSI ... 8
2.2.4. Khả năng cung cấp thông tin các dải phổ trong giám sát rừng ... 11
2.2. Thư viện Eo-Learn ... 11
2.3. Phần mềm Envi ... 13
CHƯƠNG 3. MÔ HÌNH MẠNG NƠRON TÍCH CHẬP TRÍCH XUẤT LỚP PHỦ THỰC VẬT TỪ ẢNH VỆ TINH SENTINEL ... 19
3.1. Giới thiệu về học sâu ... 19
3.2. Mạng nơ-ron tích chập (Convolutional neural network) ... 22
3.1.1. Kiến trúc ... 22
3.1.2. Các siêu tham số của bộ lọc (hyper-parameter) ... 25
3.1.3. Điều chỉnh các siêu tham số ... 26
3.1.4. Những kiến trúc sử dụng thủ thuật tính toán ... 27
3.3. Unet ... 28
3.4. Trích xuất lớp phủ thực vật sử dụng EO-learn ... 29
3.3.1. Độ phủ thực vật ... 29
3.3.2. Quy trình xử lý ... 31
Chương 4: THỰC NGHIỆM ... 36
4.1. Vùng thực nghiệm ... 36
4.2. Kết quả thực nghiệm ... 38
4.2.1. Kết quả chạy thực nghiệm của đề tài ... 38
4.2.2. So sánh kết quả thực nghiệm với phần mềm Envi ... 40
Chương 5. KẾT LUẬN ... 41
TÀI LIỆU THAM KHẢO ... 43
PHỤ LỤC ... 45
DANH MỤC CÁC KÝ HIỆU VÀ CHỮ VIẾT TẮT
Viết tắt Giải thích
RGB Tổ hợp màu Red, Green, Blue
AOI Area-of-interest
CNNs Convolutional neural network
DL Deep Learning (Học sâu)
PNR Vườn tự nhiên cấp vùng
EU European
RNN Recurrent Neural Network
LSTM Long Short-Term Memory
GRU Gated Recurrent Unit
CNN Convolutional Neural Network
DBN Deep Belief Network
DSN Deep Stacking Network
DANH MỤC CÁC BẢNG
Bảng 2.1: Đặc tính kỹ thuật của hệ thống Sentinel-2 ... 5
Bảng 2.2: Bước sóng của các kênh phổ và các ứng dụng của dữ liệu Sentinel-2 ... 9
Bảng 2.3: EO tasks Core ... 45
Bảng 2.4: EO tasks Coregistration ... 45
Bảng 2.5: EO tasks Features ... 46
Bảng 2.6: EO tasks Geometry ... 48
Bảng 2.7: EO tasks Io ... 48
Bảng 2.8: EO tasks Mask ... 50
Bảng 2.9: EO tasks ml_tools ... 50
Bảng 4.1: Bảng so sánh các bước và kết quả xử lý ảnh vệ tinh giữa phần mềm envi và hệ thống sử dụng Unet và Eo-Learn ... 40
DANH MỤC CÁC HÌNH VẼ, ĐỒ THỊ
Hình 2.1: Dải phổ và độ phân giải không gian của các dữ liệu Sentinel-2 ... 10
Hình 2.2: Ví dụ về quy trình xử lý ảnh của thư viện Eo-Learn ... 12
Hình 2.3: Xử lý ảnh với Mô-đun Rigorous Orthorectification ... 14
Hình 2.4: Xử lý ảnh với Mô-đun Envi Feature Extraction ... 15
Hình 2.5: Xử lý ảnh với Mô-đun Envi Dem ... 15
Hình 2.6: Xử lý ảnh với Mô-đun Envi Atmospheric Correction module ... 16
Hình 2.7: Xử lý ảnh với Mô-đun Envi NITF [6] ... 16
Hình 2.8: Xử lý ảnh với sản phẩm chuyên dụng Envi Lidar ... 17
Hình 2.9: Xử lý ảnh với sản phẩm chuyên dụng Envi SARScape ... 17
Hình 2.10: Quy trình xử lý ảnh với phần mềm Envi ... 18
Hình 3.1: Mối quan hệ giữa AI, Machine Learning và Deep Learning ... 20
Hình 3.2: Các thành phần trong kiến trúc truyền thống của CNN ... 22
Hình 3.3: Minh hoạ tích chập (Convolution) ... 23
Hình 3.4: Làm mờ ảnh bằng cách lấy giá trị trung bình các điểm ảnh lân cận ... 23
Hình 3.5: Phát hiện biên cạnh bằng cách tính vi phân ... 23
Hình 3.6: Ví dụ minh hoạ lấy giá trị lớn nhất (Max pooling) ... 24
Hình 3.7: Ví dụ minh hoạ lấy giá trị trung bình (Average pooling) ... 24
Hình 3.8: Minh hoạ về kết nối đầy đủ (Fully connected) trong CNNs ... 25
Hình 3.9: Minh hoạ các chiều của bộ lọc ... 25
Hình 3.10: Minh hoạ về độ trượt (Stride) ... 25
Hình 3. 11: Minh hoạ tính tương thích của các tham số trong tích chập ... 26
Hình 3.12: Ví dụ minh hoạ về GAN ... 27
Hình 3. 13: Minh hoạ về phương thức kết nối tắt (Skip connections) ... 27
Hình 3.14: Kiến trúc mạng U-net ... 29
Hình 3. 15: Chọn vùng tải ảnh vệ tinh ... 31
Hình 3.16: Cấu trúc file Geojson của vùng chọn tải ảnh vệ tinh ... 32
Hình 3.17: đăng ký tài khoản trên Sentinel-hub để tải ảnh vệ tinh ... 33
Hình 3.18: Cấu hình các thông số trên Sentinel-hub để tải dữ liệu ảnh vệ tinh ... 33
Hình 3.19: Cấu hình tính chỉ số NDVI Json file ... 34
Hình 3.20: Json file cấu hình tính chỉ số NDVI trên Sentinel-hub ... 34
Hình 3.21: Cấu hình các thông số phía Client để tải ảnh vệ tinh ... 34
Hình 3.22: Quy trình xử lý ảnh vệ tinh với mô hình Unet và thư viện Eo-learn ... 35
Hình 4.1: Ma trận độ chính xác của mô hình (Confusion matrix) ... 39
Hình 4.2: Ma trận độ chính xác giữa hệ thống (trái, ~ 84,5%) và phần mềm ENVI (phải, ~ 87,1%) khi thử nghiệm với cùng bộ dữ liệu ... 40
CHƯƠNG 1. GIỚI THIỆU 1.1. Tính cấp thiết và lý do chọn đề tài
Năm 1943 là giai đoạn manh nha ý tưởng về trí tuệ nhân tạo, trải qua các giai đoạn hình thành và phát triển đến nay trí tuệ nhân tạo ngoài việc trở thành lĩnh vực nghiên cứu chủ chốt ở các viện nghiên cứu và trường đại học, việc ứng dụng trí tuệ nhân tạo vào các lĩnh vực khoa học, kỹ thuật, sản xuất đã trở nên vô cùng khả thi. Từ các ứng dụng học tiếng anh, phân tích dữ liệu, vận hành hệ thống sản xuất, xe tự hành, y tế, nông lâm nghiệp … đều có ứng dụng của trí tuệ nhân tạo, nhằm nâng cao hiệu suất cũng như kết quả hoạt động nhằm phục vụ nhu cầu của con người ngày một tốt hơn. Trí tuệ nhân tạo đã góp phần giải quyết những bài toán với quy mô lớn, những việc mà trước đây với sức người không thể hoặc rất khó khăn để giải quyết.
Đi cùng với giai đoạn phát triển của trí tuệ nhân tạo, lĩnh vực nghiên cứu khoa học vũ trụ cũng được phát triển hết sức mạnh mẽ, năm 1957 Liên Xô đã phóng thành công vệ tinh Sputnik 1 lên không gian, cho đến nay đã có hàng trăm vệ tinh hoạt động trên không gian, với nhiệm vụ thu thập dữ liệu viễn thám để phục vụ nhu cầu nghiên cứu khoa học.
Nguyên lý hoạt động của viễn thám là nhờ vào sự phản xạ bề mặt của các vật thể, đối tượng trên bề mặt Trái Đất sử dụng các dải phổ hoặc nguồn năng lượng khác nhau. Do đó, mỗi loại bề mặt có kết cấu đặc trưng khác nhau sẽ phản xạ/ tán xạ lại những giá trị khác nhau. Đối với mỗi nguồn năng lượng khác nhau, dữ liệu viễn thám lại mang các đặc trưng riêng. Tín hiệu phản xạ lại từ các bề mặt lớp phủ trên Trái Đất sau đó được thu thập và xử lý tại các trạm thu dữ liệu ảnh vệ tinh để sử dụng nghiên cứu cho các miền ứng dụng khác nhau. [1]
Với sự phát triển mạnh mẽ của khoa học, các loại ảnh viễn thám thông dụng như Modis, Landsat 8, Spot 5, Venus, Sentinel 2A… đã được sử dụng trong nhiều lĩnh vực như:
- Khí tượng: dùng để dự báo thời tiết, dự báo thiên tai liên quan đến biến đổi nhiệt độ bề mặt đất, mây...
- Bản đồ: là công cụ đắc lực phục vụ cho ngành bản đồ, thành lập các loại bản đồ địa hình và bản đồ chuyên đề ở nhiều tỉ khác nhau.
- Nông-Lâm nghiệp: theo dõi mức độ biến đổi thảm phủ thực vật, độ che phủ rừng...
- Địa chất: Theo dõi tốc độ sa mạc hoá, tốc độ xâm thực bờ biển, phân tích những cấu trúc địa chất trên mặt cũng như bên trong lòng đất (vỏ trái đất)...
- Môi trường: Giám sát biến động ô nhiễm, rò rỉ dầu trên mặt (thông qua chỉ thị thực vật), nghiên cứu quản lý biến động đô thị hóa, nghiên cứu hiện tượng đảo nhiệt đô thị...
Thảm thực vật đóng vai trò quan trọng trong việc duy trì tính đa dạng sinh học của hệ sinh thái. Lớp phủ rừng ảnh hưởng tới sự sinh tồn của các loài sinh vật quý hiếm, những loài đóng vai trò quan trọng trong hệ sinh thái, theo thời gian, dưới sự tác động của tự nhiên và con người, lớp phủ thực vật sẽ có những thay đổi nhất định.
Ngày nay với sự phát triển mạnh mẽ của công nghệ và Internet, việc sử dụng công nghệ viễn thám trong các bài toán giám sát, quan trắc các loại bề mặt lớp phủ trên trái đất nói chung và giám sát lớp phủ thực vật nói riêng đã được áp dụng rất phổ biến và rộng rãi. Công nghệ Viễn thám và hệ thông tin địa lý (GIS – Geographical Information System) được ứng dụng nhiều trong nghiên cứu, điều tra xây dựng bản đồ lớp phủ thực vật. Ứng dụng công nghệ này trong việc nghiên cứu đánh giá biến động lớp phủ thực vât đảm bảo tính khách quan, độ chính xác cao, tiết kiệm thời gian.
Tuy nhiên, trong vài năm gần đây với sự bùng nổ của trí tuệ nhân tạo (AI - Artificial Intelligence), đã đưa việc áp dụng công nghệ vào mọi mặt trong đời sống xã hội lên một tầm cao mới. Với việc áp dụng các kỹ thuật học sâu (DL – Deep Learning) vào công nghệ viễn thám, đã giúp cho chúng ta giải quyết được rất nhiều bài toán khó khăn, mà đối với các công nghệ trước đây phải mất rất nhiều thời gian mới có thể xử lý được.
Chính vì lý do trên, dưới sự hướng dẫn của TS Lê Hồng Anh và PSG.TS Trương Ninh Thuận tôi đã lựa chọn đề tài “Nghiên cứu phương pháp trích xuất đặc trưng trên ảnh vệ tinh sử dụng các kỹ thuật học sâu”, áp dụng trong việc trích xuất đặc trưng ảnh vệ tinh nhằm giám sát lớp phủ thực vật, hỗ trợ cho công tác quản lý nông nghiệp và lâm nghiệp ở Việt Nam.
1.2. Mục tiêu và phạm vi nghiên cứu
Thảm thực vật có vai trò rất quan trọng đối với cuộc sống của con người cũng như môi trường như: cung cấp nguồn gỗ, điều hòa không khí, tạo ra oxy, là nơi cư trú động thực vật, ngăn chặn gió bão, chống xói mòn đất, đảm bảo cho sự sống, hạn chế biến đổi khí hậu…
Chính vì thế việc giám sát lớp phủ thực vật là điều vô cùng quan trọng. Có rất nhiều nguyên nhân ảnh hưởng đến sự biến đổi lớp phủ thực vật như: khai thác trái phép, đốt nương làm rẫy, cháy rừng… làm cho việc giám sát lớp phủ thực vật trở nên hết sức khó khăn. Với công nghệ phát triển, việc ứng dụng công nghệ thông tin vào việc giảm sát lớp phủ thực vật là nhu cầu vô cùng cấp thiết.
Để xử lý vấn đề này, các phần mềm chuyên dụng được phát triển, kết hợp với dữ liệu viễn thám nhằm trích xuất đặc trưng của ảnh vệ tinh để giám sát lớp phủ thực vật, giúp cho công tác quản lý rừng trở nên dễ dàng hơn. Các phần mềm này hỗ trợ người dùng tương đối đầy đủ các tính năng để xử lý ảnh vệ tinh nhưng đòi hỏi người dùng phải có chuyên môn cao về viễn thám và xử lý ảnh vệ tinh, đồng thời việc xử lý nhiều dữ liệu mất tương đối nhiều thời gian.
Chính vì những lý do trên, mục tiêu của luận văn là nghiên cứu và ứng dụng các kỹ thuật học sâu trong việc trích xuất đặc trưng ảnh vệ tinh nhằm giám sát lớp phủ thực vật, áp dụng trên phạm vi tỉnh Cao Bằng. Trọng phạm vi luận văn này sẽ tập trung nghiên cứu về mô hình mạng Nơ-ron phức hợp U-Net để tiến hành giám sát lớp phủ thực vật của tỉnh Cao Bằng dựa trên dữ liệu ảnh vệ tinh Sentinel- 2. Giúp nâng cao hiệu quả trong công tác giám sát lớp phủ thực vật nói chung cũng như giám sát lớp phủ rừng nói riêng, cải thiện năng suất làm việc so với việc sử dụng các công nghệ cũ.
1.3. Nội dung nghiên cứu
Để đạt được mục tiêu trên, tác giả đã nghiên cứu về các nội dung chính sau:
Dữ liệu viễn thám: Là dữ liệu ảnh thu được từ các bộ cảm đặt trên mặt đất, máy bay hoặc vệ tinh. Dữ liệu ảnh có thể ở dạng ảnh tương tự hoặc ảnh số. Với công nghệ hiện nay, ảnh vệ tinh được cung cấp và sử dụng một cách phổ biến, có thể kể đến ảnh của các vệ tinh Spot, AVNIR, Landsat TM, Landsat ETM, Moss- 1, Modis, GLI, Sentinel… Trong đó, Ảnh vệ tinh Sentinel-2 với ưu điểm về độ phân giải cao được ứng dụng trong nông nghiệp, lâm nghiệp nhằm giám sát thực vật và rừng, giám sát sự thay đổi của độ che phủ thực vật…
Kỹ thuật học sâu: học máy dựa trên một tập hợp các thuật toán để cố gắng mô hình dữ liệu trừu tượng hóa ở mức cao bằng cách sử dụng nhiều lớp xử lý với cấu trúc phức tạp, hoặc bằng cách khác bao gồm nhiều biến đổi phi tuyến. Học sâu bao gồm nhiều kiến trúc như mạng neuron tích chập sâu, mạng neuron sâu, mạng niềm tin sâu và mạng neuron tái. Trong phạm vi nghiên cứu của luận văn, tác giả tập trung nghiên cứu về mạng neural tích chập (CNNs), sử dụng làm nền tảng để tiến hành xây dựng kiến trúc U-Net kết hợp với thư viện Eo-Learn phục vụ cho việc trích xuất các đặc trưng của ảnh vệ tinh.
Thư viện EO-Learn: là một tập hợp các gói mã nguồn mở được viết bằng ngôn ngữ python, hỗ trợ rất tốt trong việc xử lý và khai thác dữ liệu có giá trị của ảnh vệ tinh. Eo-Learn bao gồm 8 gói: Eo-learn-core (thực hiện các khối xây dựng cơ bản), Eo-learn-coregistration (xử lý đồng đăng ký hình ảnh), Eo-learn- features (trích xuất thuộc tính dữ liệu và thao tác với tính năng), Eo-learn- geometry (dùng để biến đổi hình học và chuyển đổi giữa dữ liệu vectơ và dữ liệu
raster), Eo-learn-io (đầu vào / đầu ra liên quan đến việc lấy dữ liệu), Eo-learn- mask (sử dụng để che dữ liệu và tính toán mặt nạ đám mây), Eo-learn-ml-tools (các công cụ của Eo-Learn), Eo-learn-visualization (trực quan hóa các yếu tố cốt lõi của eo-learn)
1.4. Cấu trúc luận văn
Trong khuôn khổ luận văn, tác giả đã trình bày những khái niệm tổng quan về lớp phủ rừng, dữ liệu viễn thám, ảnh vệ tinh sentinel-2, kỹ thuật học sâu và các kiến trúc mạng nơ-ron tích chập. Trình bày về việc tải dữ liệu ảnh vệ tinh, xây dựng mô hình U-net để thực hiện ứng dụng kỹ thuật học sâu trong việc trích xuất đặc trưng ảnh vệ tinh nhằm tính toán lớp phủ rừng áp dụng tại tỉnh Cao Bằng. Tác giả đã so sánh kết quả của mô hình so với kết quả xử lý ảnh vệ tinh trên phần mềm chuyên dụng Envi. Luận văn được trình bày trong 5 chương:
Chương 1: Giới thiệu: tác giả trình bày về tính cấp thiết của đề tài, mục tiêu và phạm vi nghiên cứu của đề tài, các nội dung nghiên cũng như cấu trúc của luận văn
Chương 2: Các kiến thức và công nghệ nền tảng: tác giả trình bày về các kiến thức nền tảng thực hiện đề tài như các kỹ thuật học sâu, ảnh vệ tinh, thư viện Eo-Learn, phần mềm Envi
Chương 3: Mô hình mạng Nơron tích chập trích xuất lớp phủ thực vật từ ảnh vệ tinh Sentinel: tác giả trình bày việc xây dựng mạng nơ-ron tích chập với kiến trúc U-net để tiến hành trích xuất lớp phủ thực vật.
Ngoài ra tác giả cũng giới thiệu một số chỉ số giúp tính toán lớp phủ thực vật và quy trình xử lý của bài toán với thư viện Eo- Learn
Chương 4: Thực nghiệm: Tác giả giới thiệu về vùng thực nghiệm, các kết quả thực nghiệm cũng như so sánh ưu nhược điểm so với phần mềm Envi
Chương 5: Kết luận: Tác giả trình bày về vai trò về nghiên cứu trong luận văn, các kết quả đạt được, các điểm hạn chế cũng như hướng phát triển tiếp theo của luận văn.
CHƯƠNG 2. CÁC KIẾN THỨC VÀ CÔNG NGHỆ NỀN TẢNG 2.1. Ảnh vệ tinh Sentinel-2
2.2.1. Thiết kế kỹ thuật của vệ tinh Sentinel-2
Vệ tinh Sentinel-2 được thiết kế là một cặp vệ tinh song sinh gắn thiết bị thu ảnh đa phổ tiếp nối việc cung cấp dữ liệu vệ tinh phục vụ giám sát tài nguyên thiên nhiên của các dòng vệ tinh LANDSAT và SPOT thực hiện. Hai vệ tinh được thiết kế bay ở độ cao 786 km trong quỹ đạo đồng bộ mặt trời, được thiết kế phân pha ở 180° trên các mặt đối diện của quỹ đạo nên tấp suất chụp lặp của 2 vệ tinh rât cao, là 5 ngày.
Vệ tinh Sentinel-2 được thiết kế tiên tiến dựa trên các nền tảng mới do tập đoàn Astrium GmbH phát triển có thừa hưởng kinh nghiệm mà EADS-Astrium từ việc chế tạo các vệ tinh ESA trước đây. Mỗi vệ tinh Sentinel-2 nặng khoảng 1,2 tấn, với tuổi thọ 7,25 bao gồm giai đoạn vận hành trên quỹ đạo. Vị trí của mỗi vệ tinh Sentinel-2 được xác định trên quỹ đạo bằng thiết bị GNSS để đảm bảo việc chính xác của quỹ đạo bay, hệ thống Sentinel-2 bao gồm:
- Trạm vận hành hướng bay để điều khiển, giám sát và lập lệnh cho vệ tinh;
- Trạm mặt đất quản lý trữ lượng dữ liệu lưu trên vệ tinh để lập lịch quét, tải dữ liệu thu nhận, xử lý, lưu trữ, phân phối và kiểm soát chất lượng;
- Mạng lưới các trạm băng tần S và X cho phép liên lạc với vệ tinh từ 4 trạm mặt đất Kiruna, Svalbard, Mas Palomas và Prince Albert.
Ở chế độ bình thường, vệ tinh hoạt động thu ảnh có tính hệ thống với chu kỳ 10 ngày. Tuy nhiên, trong trường hợp khẩn cấp vệ tinh có thể thu nhận dữ liệu và cung cấp cho người sử dụng trong vòng 3 giờ đồng hồ sau khi thu nhận.
Bảng 2.1: Đặc tính kỹ thuật của hệ thống Sentinel-2
Đặc điểm hệ thống vệ tinh Thông tin
Tính liên tục Cần 4 vệ tinh hoạt động trong chu kỳ 15 năm Các trạm mặt đất Ở Italia, Nauy, Tây Ban Nha, Alaska (Mỹ)
Độ tin cậy 0.7
Độ sẵn có 97%
Định vị không có điểm khống
chế GCP <20m
Độ rộng dải quét 290 km
Phương thức hoạt động Tiêu chuẩn, mở rộng, hỗ trợ, an toàn Thời lượng chụp ảnh tối đa 32 phút mỗi 100 phút trong quỹ đạo
Sự kết hợp giữa dải quét rộng và yêu cầu thu nhận dữ liệu toàn cầu liên tục với tần suất chụp lặp cao dẫn đến việc Sentinel -2 tạo ra khoảng 1,6 TBytes dữ liệu hình ảnh thô được nén mỗi ngày. Điều này có nghĩa tốc độ cung cấp dữ liệu thô trung bình liên tục là 160 Mbit/s, với khả năng lưu trữ bộ nhớ là 2,4 Tbits. Dữ liệu được nén bằng thuật toán nén đa độ phân giải dựa trên sự phân tách sóng.
Chức năng này hoạt động trong thời gian thực đem lại tốc độ truyền ổn định với tỷ lệ nén được tối ưu hóa cho từng kênh phổ để đảm bảo chất lượng ảnh.
Vệ tinh Sentinel-2 phóng lên vũ trụ mang nhiệm vụ cung cấp tính liên tục cho các dịch vụ giám sát trái đất bằng dữ liệu quang học độ phân giải không gian cao. Bộ cảm quang học trên vệ tinh được thiết kế cải tiến để cung cấp ảnh ở 13 kênh phổ từ dải nhìn thấy, cận hồng ngoại và hồng ngoại sóng ngắn. Thiết bị đa phổ MSI cung cấp ảnh từ bước sóng 443nm đến 2190nm và chụp bề mặt đất toàn cầu một cách có hệ thống từ 560 Nam đến 840 Bắc. Dữ liệu ảnh Sentinel-2 cung cấp 3 loại độ phân giải không gian gồm: Độ phân giải 10 m ở 4 kênh từ dải hồng ngoại nhìn thấy và cận hồng ngoại; 20 m ở 6 kênh từ dải viền đỏ và cận hồng ngoại; 3 kênh độ phân giải 60 m dùng để hiệu chỉnh khí quyển. Sentinel-2 cũng được thiết kế để quay ống kính đến ± 20,60 dọc theo dải quét để phục vụ các yêu cầu khẩn cấp. Tín hiệu được truyền đến các trạm mặt đất lõi của Sentinel và thông qua liên kết laser của EDRS.
Từ khía cạnh quan sát Trái đất, các nhà nghiên cứu luôn mong muốn có thể sử dụng nguồn dữ liệu mở và miễn phí như các dòng vệ tinh Landsat và Sentinel.
Do đó, khi kết hợp ảnh các vệ tinh Landsat 5-8 với dữ liệu ảnh Sentinel-2 sẽ đạt tần suất chụp lặp 3 ngày tại một điểm trên mặt đất. Do đó, dữ liệu Sentinel-2 có thể mang lại kết quả mong muốn nếu áp dụng phương pháp phù hợp.
2.2.2. Thiết kế kỹ thuật bộ cảm MSI trên vệ tinh Sentinel-2
Bộ cảm MSI trên vệ tinh Sentinel-2 còn có các cải tiến rất lớn so với bộ cảm OLI trên vệ tinh LandSat 8 như: việc thu hẹp độ rộng dải phổ của Sentinel-2 làm hạn chế ảnh hưởng của các thành phần khí quyển, bao gồm cả hơi nước. Kênh 8A của Sentinel được thu hẹp dải phổ ở bước sóng 865 nm trong vùng cận hồng ngoại để tránh ảnh hưởng từ hơi nước nhưng vẫn có khả năng thể hiện được những vùng có giá trị phổ bằng phẳng, đặc biệt là ở dải phổ cận hồng ngoại cho thảm thực vật tuy nhiên vẫn nhạy cảm với hàm lượng oxit sắt trong đất. Dải phổ 443 nm cũng được sử dụng trong các nhiệm vụ như: tính toán Chỉ số thực vật toàn cầu ENVISAT MERIS (MGVI) và trong hiệu chỉnh khí quyển cho đầu thu MODIS của Cơ quan Hàng không và Vũ trụ Hoa Kỳ.
Độ phân giải không gian và thời gian đang là ưu điểm vượt trội của của thế hệ vệ tinh quan học Sentinel-2. Một trong những đặc tính vượt trội của Sentinel 2 và Landsat 8 là có cùng dải phổ từ 400nm – 2300nm tuy số lượng băng phổ khác nhau, 13 băng phổ của ảnh Sentinel 2 so với 9 băng phổ của ảnh Landsat 8. Điều này được giải thích chủ yếu do khả năng đâm xuyên vào môi trường nước của các băng phổ khác nhau. Theo mức năng lượng của chúng thì khả năng bị hấp thụ tăng dần từ bước sóng 400nm đến bị hấp thụ gần như hoàn toàn ở bước sóng 900nm. Băng xanh blue có thể đi sâu tối đa 15m, băng xanh (green) xuyên được tối đa 10m và chỉ 5m đối với băng đỏ. Từ đó có thể thấy, cả ảnh Landsat 8 và Sentinel 2 đều chứa các băng phổ có bước sóng phù hợp đối với các nhiệm vụ đánh giá biến động nguồn lợi hoặc chất lượng nước vùng ven bờ, đầm phá, sông.
Đối với ứng dụng theo dõi diễn biến rừng, một trong những phương pháp triển vọng hiện nay đáp ứng được yêu cầu cập nhật bản đồ hiện trạng rừng là ứng dụng công nghệ viễn thám để xác định khu vực tăng/giảm rừng đến từng lô kiểm kê theo thời gian. Tuy nhiên, để ứng dụng công nghệ này, việc lựa chọn tư liệu ảnh phù hợp là vấn đề đặt ra. Các loại ảnh có độ phân giải không gian cao (dưới 10 m) thường có giá thành tương đối đắt. Bên cạnh đó, nếu thực hiện trên khu vực rộng, sẽ cần dung lượng lưu trữ dữ liệu, thời gian để xử lý ảnh và yêu cầu về cấu hình phần cứng, phần mềm cho xử lý ảnh rất lớn. Do đó, để áp dụng trên phạm vi cả nước là không khả thi.
Các loại ảnh có độ phân giải không gian thấp (>250 m) như: MODIS, NOAA, MERIS... một pixel ảnh có thể lớn hơn nhiều so với một lô kiểm kê, nên không phù hợp với hệ thống giám sát rừng ở quy mô địa phương. Từ đó, các loại ảnh vệ tinh có độ phân giải trung bình (10 - 30 m), được cung cấp miễn phí như Landsat-8, Sentinel-2 tỏ ra có nhiều ưu điểm và triển vọng để giám sát sự thay đổi độ che phủ rừng ở quy mô địa phương. Để đáp ứng các yêu cầu: phù hợp cho giám sát sự thay đổi độ che phủ rừng ở quy mô địa phương và độ phân giải không gian cao nhất có thể, ảnh vệ tinh Landsat-8 OLI và Sentinel-2 là 2 loại ảnh có tiềm năng nhất. Sự tương đồng về mối quan hệ phổ giữa ảnh Sentinel 2 và Landsat 8 sẽ làm tăng giá trị sử dụng khi kết hợp cả hai nguồn ảnh vào các nghiên cứu về mặt đất, bao gồm theo dõi diễn biến rừng.
Từ khía cạnh quan sát Trái đất, các nhà nghiên cứu luôn mong muốn có thể sử dụng nguồn dữ liệu mở và miễn phí như các dòng vệ tinh Landsat và Sentinel.
Như đã đề cập ở trên, khi kết hợp ảnh các vệ tinh Landsat 5-8 với bộ cảm dòng vệ tinh Sentinel, ở đây là Sentinel-2 sẽ đạt tần suất chụp lặp 3 ngày tại một điểm trên mặt đất. Mặc dù các đầu thu này có độ phân giải không gian ở mức trung bình (30m đối với Landsat và 10m đối với Sentinel-2) khi so sánh với các dữ liệu
ảnh khác như Quickbird (0.6m) hoặc WorldView (0.5m) nhưng vẫn có thể mang lại kết quả mong muốn nếu áp dụng phương pháp phù hợp.
Hiện nay, ảnh vệ tinh đa phổ Sentinel-2 và Landsat 8 OLI được đặc biệt quan tâm không chỉ bởi các tính năng kỹ thuật mà còn ở chu kỳ chụp lặp của chúng.
Nếu hoạt động độc lập, Landsat chỉ chụp lặp ảnh 16 ngày/lần thay vì 5 ngày như Sentinel-2. Từ năm 2017, khi vệ tinh Sentinel-2B được phóng lên quỹ đạo và hoạt động ổn định, kết hợp với Landsat 8 OLI thì thế giới được cung cấp ảnh quang học độ phân giải cao với chu kỳ 3 ngày và được phân phối miễn phí trên toàn cầu.
2.2.3. Thiết kế khả năng lấy mẫu của bộ cảm quang phổ MSI
Như chúng ta đã biết Sentinel-2 có nhiệm vụ cung cấp tính liên tục cho các dịch vụ quan sát dựa trên các quan sát quang học có độ phân giải không gian cao và đa phổ trên bề mặt trên mặt đất toàn cầu. Bộ cảm MSI trên vệ tinh Sentinel-2 được thiết kế để mang dụng cụ quang học lấy mẫu ở 13 dải quang phổ kéo dài từ dải nhìn thấy, cận hồng ngoại và hồng ngoại sóng ngắn và độ phân giải không gian thay đổi từ 10 m đến 60 m tùy thuộc vào dải quang phổ với trường quan sát dài 290 km. Bộ cảm MSI trên vệ tinh Sentinel-2 còn có các cải tiến so với bộ cảm thu nhận ảnh mặt đât của vệ tinh quang học LandSAT như sau:
- Dải phổ cận hồng ngoại gốc của ảnh vệ tinh LandSAT (760-900nm) bị ảnh hưởng nặng bởi hơi nước và không đủ nhạy đối với các tham số như hàm lượng oxit sắt trong đất. Do đó, việc thu hẹp độ rộng dải phổ của Sentinel-2 làm hạn chế ảnh hưởng của các thành phần khí quyển, bao gồm cả hơi nước.Độ hẹp của dải phổ 8A ở bước sóng 865 nm trong vùng cận hồng ngoại được thiết kế để tránh ảnh hưởng từ hơi nước nhưng vẫn có khả năng thể hiện được những vùng có giá trị phổ đặc trưng bằng phẳng (plateau), đặc biệt là ở dải dải phổ cận hồng ngoại cho thảm thực vật tuy nhiên vẫn đủ để nhạy cảm với hàm lượng oxit sắt trong đất.
- Hiệu chỉnh sol khí chính xác dữ liệu thu nhận trong cấu hình Sentinel-2 được thiết kể bao gồm cả dải phổ trong vùng xanh lam ở bước sóng 443 nm (Kênh 1). Dải phổ 443 nm cũng được sử dụng trong các nhiệm vụ như: tính toán Chỉ số thực vật toàn cầu ENVISAT MERIS (MGVI) và trong hiệu chỉnh khí quyển cho đầu thu MODIS của Cơ quan Hàng không và Vũ trụ Hoa Kỳ.
- Hiệu chỉnh dữ liệu đối với các đám mây voan mỏng có thể được thực hiện bằng cách sử dụng thông tin của dải phổ cận hồng ngoại. Do tác động tiềm tàng của các đám mây voan mỏng này đối với các giá trị phản xạ cũng như việc sử dụng nó như một chỉ số trong dự báo thời tiết và vai trò của nó trong bẫy bức xạ tới của mặt trời, vì vậy, sự xuất hiện của đám
mây cần được chỉ rõ. Việc đầu thu đa phổ của Sentinel-2có thêm một dải quang phổ ở bước sóng 1375 nm, Kênh 10, có thể phát hiện được những đám mây li ti là để phát hiện được mây này.
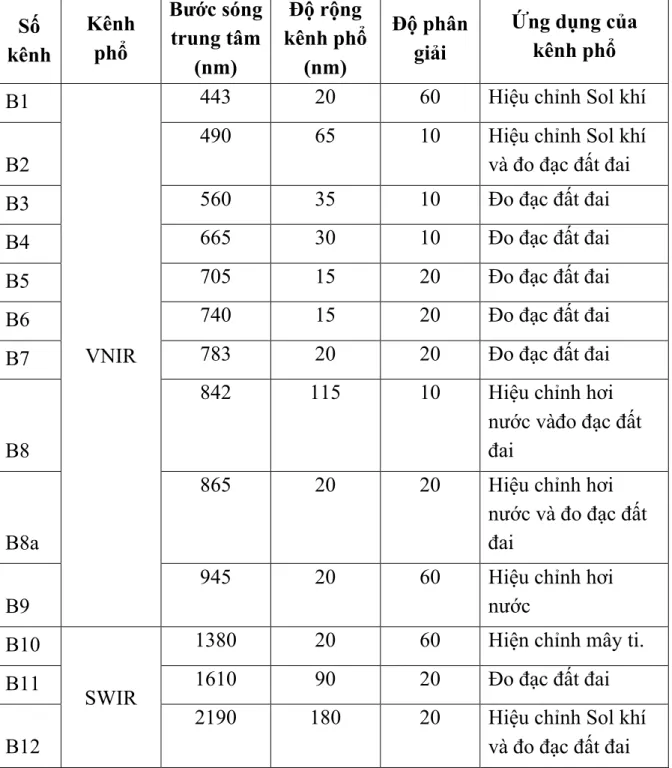
Độ phân giải không gian thể hiện ở các kênh phổ như sau: dải nhìn thấy và cận hồng ngoại có độ phân giải không gian là 10 mét; các dải viền đỏ (dải đỏ và gần hồng ngoại) và hai dải hồng ngoại sóng ngắn có độ phân giải không gian 20 mét; dải hơi nước và mật độ mây phục vụ quan sát ven biển có độ phân giải không gian là 60 mét. Bảng 2.2 dưới đây mô tả cụ thể các bước sóng của kênh phổ của dữ liệu ảnh vệ tinh Sentinel-2 [9].
Bảng 2.2: Bước sóng của các kênh phổ và các ứng dụng của dữ liệu Sentinel-2 Số
kênh
Kênh phổ
Bước sóng trung tâm
(nm)
Độ rộng kênh phổ
(nm)
Độ phân giải
Ứng dụng của kênh phổ B1
VNIR
443 20 60 Hiệu chỉnh Sol khí
B2
490 65 10 Hiệu chỉnh Sol khí
và đo đạc đất đai
B3 560 35 10 Đo đạc đất đai
B4 665 30 10 Đo đạc đất đai
B5 705 15 20 Đo đạc đất đai
B6 740 15 20 Đo đạc đất đai
B7 783 20 20 Đo đạc đất đai
B8
842 115 10 Hiệu chỉnh hơi
nước vàđo đạc đất đai
B8a
865 20 20 Hiệu chỉnh hơi
nước và đo đạc đất đai
B9
945 20 60 Hiệu chỉnh hơi
nước B10
SWIR
1380 20 60 Hiện chỉnh mây ti.
B11 1610 90 20 Đo đạc đất đai
B12
2190 180 20 Hiệu chỉnh Sol khí và đo đạc đất đai
Với 13 dải quang phổ trải dài từ nhìn thấy và cận hồng ngoại đến hồng ngoại sóng ngắn ở độ phân giải không gian khác nhau từ trong khoảng 10 đến 60 m.
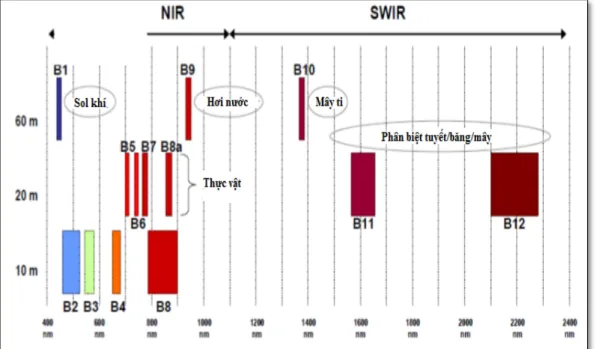
Bốn kênh phổ ở độ phân giải không gian 10m đáp ứng yêu cầu của người sử dụng cho cho mục đích giám sát độ che phủ đất trên toàn cầu và đảm bảo các khả năng tương thích với dữ liệu vệ tinh SPOT 4 và 5, landsat 8. Sáu kênh phổ ở độ phân giải không gian 20m dùng chung cho mục đích đo đạc đất đai và hiệu chỉnh. Riêng ba kênh phổ có độ phân giải không gian 60m chủ yếu dành riêng cho hiệu chỉnh khí quyển và sàng lọc trên đám mây, 443nm để thu hồi sol khí, 940nmđể điều chỉnh hơi nước và 1375nm cho phát hiện đám mây voan mỏng. Độ phân giải 60 m được coi là đủ để nắm bắt sự thay đổi không gian của thông số địa vật lý khí quyển. Hình 2.1 dưới dây mô tả giải phổ và độ phân giải không gian của dữ liệu ảnh Sentinel-2 [4].
Hình 2.1: Dải phổ và độ phân giải không gian của các dữ liệu Sentinel-2 Độ hẹp của dải phổ 8a với bước sóng 865 nm trong vùng cận hồng ngoại được thiết kế để tránh ảnh hưởng từ hơi nước nhưng vẫn có khả năng thể hiện được vùng bằng phẳng ở dải cận hồng ngoại cho thảm thực vật và cũng nhạy cảm với hàm lượng oxit sắt trong đất.
Dải phổ 443 nm được sử dụng trong các nhiệm vụ trước: để tính toán Chỉ số MGVI và trong hiệu chỉnh khí quyển cho đầu thu MODIS của NASA. Dữ liệu hiệu chỉnh sol khíchính xácđược thu nhậncả dải phổ trong vùng xanh lam ở bước sóng 443 nm trong cấu hình Sentinel-2.
Việc có thêm một dải quang phổ ở bước sóng 1375 nm (Kênh 10) có thể phát hiện đám mây voan mỏng, do tác động tiềm tàng của nó đối với các giá trị phản xạ, việc sử dụng nó như một chỉ báo trong dự báo thời tiết và vai trò của nó trong bẫy bức xạ tới của mặt trời, do đó, sự xuất hiện của đám mây cần được chỉ rõ.
2.2.4. Khả năng cung cấp thông tin các dải phổ trong giám sát rừng
Đối với ứng dụng theo dõi diễn biến rừng, một trong những phương pháp triển vọng hiện nay đáp ứng được yêu cầu cập nhật bản đồ hiện trạng rừng là ứng dụng công nghệ viễn thám để xác định khu vực tăng/giảm rừng đến từng lô kiểm kê theo thời gian. Tuy nhiên, để ứng dụng công nghệ này, việc lựa chọn tư liệu ảnh phù hợp là vấn đề đặt ra.
Các loại ảnh có độ phân giải không gian cao (dưới 10m) thường có giá thành tương đối đắt. Bên cạnh đó, nếu thực hiện trên khu vực rộng, sẽ cần dung lượng lưu trữ dữ liệu, thời gian để xử lý ảnh và yêu cầu về cấu hình phần cứng, phần mềm cho xử lý ảnh rất lớn. Do đó, để áp dụng trên phạm vi cả nước là không khả thi, các loại ảnh có độ phân giải không gian thấp (>250 m) như: MODIS, NOAA, MERIS...
một pixel ảnh có thể lớn hơn nhiều so với một lô kiểm kê, nên không phù hợp với hệ thống giám sát rừng ở quy mô địa phương. Từ đó, các loại ảnh vệ tinh có độ phân giải trung bình (10 - 30 m), được cung cấp miễn phí như Landsat-8, Sentinel- 2 tỏ ra có nhiều ưu điểm và triển vọng để giám sát sự thay đổi độ che phủ rừng ở quy mô địa phương. Để đáp ứng các yêu cầu: phù hợp cho giám sát sự thay đổi độ che phủ rừng ở quy mô địa phương và độ phân giải không gian cao nhất có thể, ảnh vệ tinh Sentinel-2 là loại ảnh có tiềm năng nhất. Kết hợp với sự tương đồng về mối quan hệ phổ giữa ảnh Sentinel 2 và Landsat 8 giá trị sử dụng sẽ được tăng rất lớn trong các nghiên cứu về mặt đất, bao gồm theo dõi diễn biến rừng.
2.2. Thư viện Eo-Learn
Eo-learn giúp việc khai thác thông tin có giá trị từ hình ảnh vệ tinh trở nên dễ dàng.
Sự sẵn có của dữ liệu quan sát Trái đất mở (EO) thông qua các chương trình Copernicus và Landsat đại diện cho một nguồn tài nguyên chưa từng có cho nhiều ứng dụng EO, từ việc sử dụng đại dương và đất liền, giám sát lớp phủ, kiểm soát thảm họa, dịch vụ khẩn cấp và cứu trợ nhân đạo. Với lượng lớn dữ liệu có độ phân giải không gian cao với tần suất truy cập lại cao, các kỹ thuật có thể tự động trích xuất các mẫu phức tạp trong dữ liệu không gian-thời gian như vậy là cần thiết.
Eo-learn là một tập hợp các gói Python mã nguồn mở đã được phát triển để truy cập và xử lý liền mạch các chuỗi hình ảnh không gian-thời gian mà bất kỳ đội vệ tinh nào thu được một cách kịp thời và tự động. Eo-learn rất dễ sử dụng, được thiết kế theo mô-đun và khuyến khích cộng tác - chia sẻ và sử dụng lại các tác vụ cụ thể trong quy trình khai thác giá trị EO điển hình, chẳng hạn như tạo mặt nạ đám mây, đồng đăng ký hình ảnh, trích xuất tính năng, phân loại, v.v. Mọi người được tự do sử dụng bất kỳ nhiệm vụ nào có sẵn và được khuyến khích cải tiến, phát triển những tác vụ mới và chia sẻ chúng với phần còn lại của cộng đồng.
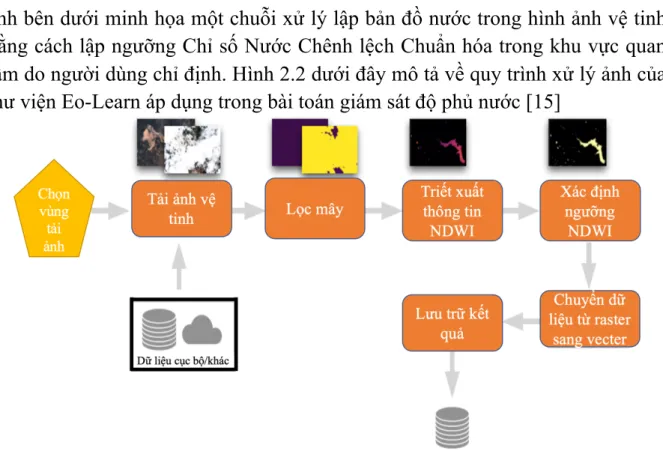
Eo-learn giúp việc khai thác thông tin có giá trị từ hình ảnh vệ tinh dễ dàng như xác định một chuỗi các thao tác sẽ được thực hiện trên hình ảnh vệ tinh. Hình
ảnh bên dưới minh họa một chuỗi xử lý lập bản đồ nước trong hình ảnh vệ tinh bằng cách lập ngưỡng Chỉ số Nước Chênh lệch Chuẩn hóa trong khu vực quan tâm do người dùng chỉ định. Hình 2.2 dưới đây mô tả về quy trình xử lý ảnh của thư viện Eo-Learn áp dụng trong bài toán giám sát độ phủ nước [15]
Hình 2.2: Ví dụ về quy trình xử lý ảnh của thư viện Eo-Learn
Thư viện eo-learn đóng vai trò là cầu nối giữa lĩnh vực quan sát Trái đất/Viễn thám và hệ sinh thái Python cho khoa học dữ liệu và học máy. Thư viện được viết bằng Python và sử dụng mảng NumPy để lưu trữ và xử lý dữ liệu viễn thám. Mục đích của nó là một mặt giúp những người không phải chuyên gia vào lĩnh vực viễn thám dễ dàng hơn và mang các công cụ hiện đại nhất về thị giác máy tính, máy học và học sâu hiện có trong hệ sinh thái Python cho các chuyên gia viễn thám.
Eo-learn được chia thành nhiều gói con theo các chức năng khác nhau và phụ thuộc gói bên ngoài. Do đó, người dùng không cần thiết phải cài đặt toàn bộ gói mà chỉ cài đặt những phần mà họ cần.
Hiện tại có các gói con sau:
- Eo-learn-core: Gói con chính thực hiện các khối xây dựng cơ bản (EOPatch, EOTask và EOWorkflow) và các chức năng thường được sử dụng.
- Eo-learn-coregistration: Gói con xử lý đồng đăng ký hình ảnh.
- Eo-learn-features: Tập hợp các tiện ích để trích xuất thuộc tính dữ liệu và thao tác với tính năng.
- Eo-learn-geometry: Gói con hình học dùng để biến đổi hình học và chuyển đổi giữa dữ liệu vectơ và dữ liệu raster.
- Eo-learn-io: Gói con đầu vào / đầu ra liên quan đến việc lấy dữ liệu từ các dịch vụ của Sentinel Hub hoặc lưu và tải dữ liệu cục bộ.
- Eo-learn-mask: Gói con được sử dụng để che dữ liệu và tính toán mặt nạ đám mây.
- Eo-learn-ml-tools: Các công cụ khác nhau có thể được sử dụng trước hoặc sau quá trình học máy.
- Eo-learn-visualization: Công cụ trực quan hóa các yếu tố cốt lõi của eo- learn.
2.3. Phần mềm Envi
ENVI (ENvironment for Visualizing Images) là bộ sản phẩm phần mềm của hãng EXELIS Visual Information Solutions (Mỹ) – http://exelisvis.com – kết hợp các kỹ thuật chuyên sâu về xử lý dữ liệu ảnh số (bao gồm dữ liệu viễn thám, DEM và GIS/GPS) với công nghệ phân tích địa không gian nhằm khai thác những thông tin có giá trị hỗ trợ ra quyết định chính xác và kịp thời. Với giao diện hiện đại, dễ sử dụng và các tính năng nổi trội trong xử lý phân tích ảnh được quy trình hóa và được phát triển nâng cấp thường xuyên, bộ phần mềm ENVI ngày càng trở thành công cụ khai thác thông tin địa không gian hiệu quả trong các ứng dụng bản đồ và tài nguyên và môi trường đa ngành.
Những tính năng nổi trội của bộ phần mềm ENVI bao gồm:
- Làm việc (hiển thị và xử lý) số lượng và dung lượng ảnh lớn;
- Đọc, hiển thị và phân tích nhiều định dạng (format) ảnh vệ tinh, ảnh thông dụng, dữ liệu raster và DEM;
- Khai thác thông tin từ nhiều loại ảnh vệ tinh và ảnh hàng không khác nhau (VNREDSat-1, SPOT, Landsat, ASTER, QuickBird, GeoEye, WorldView, Radar, Vexcel…);
- Trộn các dạng ảnh (ảnh quang học, ảnh radar…) nhằm hiểu rõ đặc điểm của vùng nghiên cứu;
- Bộ công cụ xử lý ảnh đa dạng dựa trên các phương pháp khoa học đã được kiểm chứng như công cụ xử lý hình học, công cụ phân tích phổ, công cụ phân tích dữ liệu và các công cụ nâng cao;
- Khả năng làm việc với dữ liệu vector (các định dạng shapefile, MIF, DXF và GPS) và kết nối trực tiếp với phần mềm ArcGIS cho phép dễ dàng tích hợp kết quả phân tích ảnh vào cơ sở dữ liệu và quy trình ứng dụng bản đồ GIS;
- Với ngôn ngữ lập trình IDL, ENVI có khả năng tùy biến và mở rộng theo yêu cầu quy trình xử lý phân tích ảnh của khách hàng.
Các sản phẩm ENVI
Bộ phần mềm ENVI có khoá cứng và khoá mềm thường được cung cấp đóng gói theo các mức sản phẩm như sau:
- Phần cơ bản - ENVI (Runtime) hoặc ENVI+IDL - Các mô-đun mở rộng (theo yêu cầu).
Các mô-đun mở rộng tính năng của ENVI được thiết kế để thực hiện những pháp xử lý chuyên sâu cần đến những công cụ xử lý ảnh nâng cao, như:
Mô-đun Rigorous Orthorectification: nắn chỉnh hình học về tọa độ mặt đất và tạo ảnh trực giao với độ chính xác cao. Module này dựa trên mô hình toán học sử dụng các thông số của sensor cụ thể (ví dụ như bộ cảm SPOT hoặc Landsat) nhằm loại bỏ những yếu tố gây méo ảnh trong quá trình bay chụp. Module Rigorous Orthorectification cho phép:
- Dễ sử dụng với giao diện wizard-based theo từng bước trong quá trình nắn chỉnh;
- Làm việc với nhiều dạng sensor (ví dụ SPOT 1-5, IKONOS-2, QuickBird-2, Landsat 4-5, Landsat 7 ETM+, ASTER, VNREDSat-1...);
- Tăng độ chính xác với việc lựa chọn các điểm GCP và các điểm chung của ảnh liền kề khi xử lý hàng loạt ảnh;
- Tự động hóa quá trình nắn chỉnh hình học và chuyển kết quả dễ dàng vào cơ sở dữ liệu GIS.
Hình 2.3 dưới đây thể hiện tác vụ xử lý ảnh với mô-đun Rigorous Orthorectification của phần mềm Envi [18].
Hình 2.3: Xử lý ảnh với Mô-đun Rigorous Orthorectification
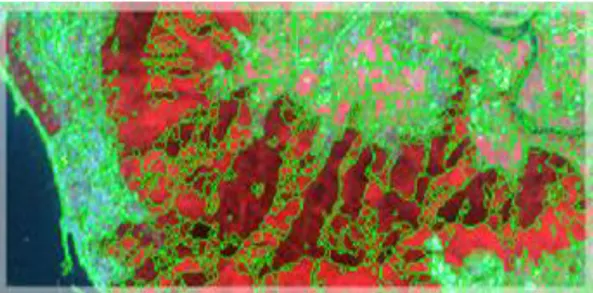
Mô-đun ENVI Feature Extraction (FX): Tìm, phát hiện và chiết tách thông tin từ các đối tượng quan tâm (ví dụ như công trình tòa nhà, sân bóng, phương tiện giao thông, đường xá cầu cống, sông hồ…) dựa trên các đặc tính không gian, đặc tính phổ hoặc đặc tính texture... từ các loại ảnh vệ tinh & ảnh hàng không khác nhau. Với khả năng tùy biến và dễ tích hợp với ArcGIS, ENVI FX cho phép người dùng thay đổi các thông số phù hợp trong chuỗi quy trình xử lý phân tích ảnh phức tạp và chiết tách thông tin cần thiết, ví dụ như phát hiện xe tăng, công trình quân sự hoặc đường băng quân sự… Hình 2.4 dưới đây thể hiện xử lý ảnh với mô-đun Feature Extraction của phần mềm Envi [18].
Hình 2.4: Xử lý ảnh với Mô-đun Envi Feature Extraction
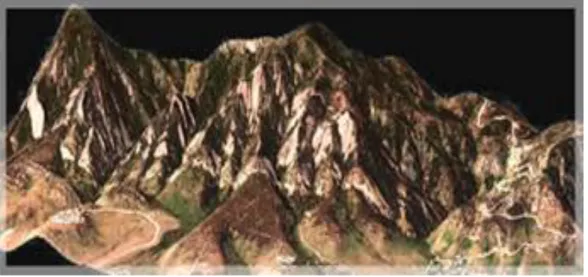
Mô-đun ENVI DEM: Tạo lập mô hình địa hình số (DEM) từ cặp ảnh stereo (ảnh vệ tinh ASTER, IKONOS, OrbView-3, QuickBird và SPOT 1-5) hoặc ảnh hàng không. Với khả năng tùy biến, người dùng có thể tương tác xem cặp ảnh stereo, đo độ cao của tòa nhà hoặc đỉnh núi, chỉnh sửa giá trị DEM và chiết tách các đối tượng 3Du. Hình 2.5 dưới đây thể hiện xử lý ảnh với mô-đun Envi Dem của phần mềm Envi [18].
Hình 2.5: Xử lý ảnh với Mô-đun Envi Dem
Mô-đun ENVI Atmospheric Correction Module (ACM): Thực hiện tiền xử lý được quy trình hóa - cho phép loại bỏ hoặc hiệu chỉnh chuyên sâu về các ảnh hưởng của khí quyển đối với ảnh vệ tinh gốc để tạo ảnh viễn thám lên level cao hơn chuẩn bị cho các bước xử lý phân tích tiếp theo. ENVI ACM cho phép thực hiện hiệu chỉnh nhanh (on-the-fly sử dụng phương pháp QUAC và hiệu chỉnh nâng cao dựa trên mô hình vật lý ảnh – phương pháp FLAASH đối với hầu hết các loại ảnh vệ tinh thường sử dụng hiện tại. Mô-đun này cần thiết đối với các ứng dụng theo dõi các thay đổi về địa hình hoặc các nhóm đối tượng một cách định lượng. Hình 2.6 dưới đây thể hiện xử lý ảnh với mô-đun Atmospheric Correction của phần mềm Envi [18].
Hình 2.6: Xử lý ảnh với Mô-đun Envi Atmospheric Correction module Mô-đun ENVI NITF: Đọc, chỉnh sửa và phân phối ảnh viễn thám trong định dạng (format) NITF có hiệu suất nén ảnh cao. Định dạng NITF chứa dữ liệu ảnh với dữ liệu đồ thị và metadata theo chuẩn JITC (Joint Interoperability Test Command). Đây là định dạng tối ưu có khả năng nén ảnh tốt, tính bảo mật cao nên thường được dùng đối với dữ liệu quốc gia và quốc phòng… Hình 2.7 dưới đây thể hiện xử lý ảnh với mô-đun Envi Atmospheric Correction của phần mềm Envi [18].
Hình 2.7: Xử lý ảnh với Mô-đun Envi NITF [6]
Sản phẩm chuyên dụng ENVI LIDAR: Xử lý chuyên sâu dữ liệu lidar nhằm xác định và chiết tách các đối tượng 3D và tạo lập cơ sở dữ liệu GIS 3D cho các ứng dụng đô thị hoặc ngành lâm nghiệp. Hình 2.8 dưới đây thể hiện xử lý ảnh với mô-đun Envi Lidar của phần mềm Envi [18].
Hình 2.8: Xử lý ảnh với sản phẩm chuyên dụng Envi Lidar
Phần mềm ENVI LIDAR cho phép người dùng xử lý dữ liệu đám mây điểm LiDAR nhằm phát hiện và chiết tách các đối tượng 3D như cây cối, đường dây điện, công trình xây dựng với các yếu tố như hình khối khung nhà và mái, mô hình số độ cao… ENVI LIDAR kết hợp việc nhận dạng tự động với các công cụ tương tác để người dùng có thể điều chỉnh các thông số xử lý nhằm kiểm soát được chất lượng sản phẩm kết quả. Với chức năng hiển thị 3D và kết nối trực tiếp với ArcGIS, ENVI LiDAR có khả năng kết nối tốt với các hệ thống xử lý phân tích địa không gian khác, khả năng mở rộng tùy biến thông qua API và đọc được tất cả các định dạng dữ liệu LIDAR thông dụng như LAS, LAZ, ASCII...
Sản phẩm chuyên dụng ENVI SARScape: Xử lý chuyên sâu dữ liệu ảnh radar, phân tích và tạo lập bản đồ DEM và bản đồ biến động bề mặt, được thể hiện ở hình 2.9 dưới đây [18].
Hình 2.9: Xử lý ảnh với sản phẩm chuyên dụng Envi SARScape
Phần mềm ENVI SARscape cho phép người dùng xử lý và diễn giải dữ liệu radar khó hiểu thành thông tin có ý nghĩa phù hợp với bối cảnh. License SARscape Basic & InSAR Bundle bao gồm 2 mô-đun là:
- SARscape Basic cho phép đọc, xử lý dữ liệu ảnh radar như lọc nâng cao, nắn chỉnh và ghép ảnh, tạo ảnh multilook… đến xử lý tạo ảnh phân loại, nhận dạng đối tượng hoặc theo dõi biến động…
- SARscape Interferometry (InSAR) cho phép xử lý cặp ảnh radar giao thoa (interferometry) nhằm tạo dữ liệu DEM và lập bản đồ dịch chuyển và biến dạng bề mặt (cập nhật bản đồ địa hình, địa mạo và trượt lở).
Ngoài ra, hãng Exelis VIS gần đây còn phát triển sản phẩm chuyên dụng ENVI for ArcGIS để tích hợp với giải pháp GIS của hãng ESRI và ENVI in the Cloud nhằm quản lý và chia sẻ nguồn lực xử lý phân tích ảnh trên Cloud đối với các doanh nghiệp và cá nhân. Hình 2.10 dưới đây thể hiện đầy đủ quy trình xử lý ảnh với phần mềm chuyên dụng Envi.
Hình 2.10: Quy trình xử lý ảnh với phần mềm Envi
CHƯƠNG 3. MÔ HÌNH MẠNG NƠRON TÍCH CHẬP TRÍCH XUẤT LỚP PHỦ THỰC VẬT TỪ ẢNH VỆ TINH SENTINEL
3.1. Giới thiệu về học sâu
Công nghệ học máy hỗ trợ nhiều khía cạnh của xã hội hiện đại: từ tìm kiếm trên web đến lọc nội dung trên mạng xã hội đến các đề xuất trên các trang web thương mại điện tử và nó ngày càng hiện diện trong các sản phẩm tiêu dùng như máy ảnh và điện thoại thông minh. Học máy được sử dụng để xác định các đối tượng trong hình ảnh, chuyển lời nói thành văn bản, khớp các mục tin tức, bài đăng hoặc sản phẩm với sở thích của người dùng và chọn các kết quả tìm kiếm có liên quan.
Các kỹ thuật học máy thông thường bị hạn chế về khả năng xử lý dữ liệu tự nhiên ở dạng thô. Trong nhiều thập kỷ, việc xây dựng hệ thống nhận dạng mẫu hoặc máy học đòi hỏi kỹ thuật cẩn thận và kiến thức chuyên môn về miền đáng kể để thiết kế một trình trích xuất tính năng chuyển đổi dữ liệu thô thành một biểu diễn nội bộ phù hợp hoặc vec-tơ đặc trưng mà từ đó học hệ thống con, thường là một bộ phân loại, có thể phát hiện hoặc phân loại các mẫu đối với dữ liệu đầu vào.
Để giải quyết được các hạn chế của học máy, một kỹ thuật được ra đời với tên gọi là Học sâu (deep learning), với mục tiêu phát triển các cỗ máy có khả năng tự học và đạo tạo chính nó dựa trên lượng lớn dữ liệu đầu vào.
Học sâu (DL - deep learning) là một chi của ngành học máy dựa trên một tập hợp các thuật toán để cố gắng mô hình dữ liệu trừu tượng hóa ở mức cao bằng cách sử dụng nhiều lớp xử lý với cấu trúc phức tạp, hoặc bằng cách khác bao gồm nhiều biến đổi phi tuyến.
Học sâu là một phần của một họ các phương pháp học máy rộng hơn dựa trên đại diện học của dữ liệu. Một quan sát (ví dụ như, một hình ảnh) có thể được biểu diễn bằng nhiều cách như một vec-tơ của các giá trị cường độ cho mỗi điểm ảnh, hoặc một cách trừu tượng hơn như là một tập hợp các cạnh, các khu vực hình dạng cụ thể… Một vài đại diện làm khiến việc học các nhiệm vụ dễ dàng hơn (ví dụ, nhận dạng khuôn mặt hoặc biểu hiện cảm xúc trên khuôn mặt) từ các ví dụ.
Một trong những hứa hẹn của học sâu là thay thế các tính năng thủ công bằng các thuật toán hiệu quả đối với học không giám sát hoặc nửa giám sát và tính năng phân cấp.
Các nghiên cứu trong lĩnh vực này cố gắng thực hiện các đại diện tốt hơn và tạo ra các mô hình để tìm hiểu các đại diện này từ dữ liệu không dán nhãn quy mô lớn. Một số đại diện được lấy cảm hứng bởi những tiến bộ trong khoa học thần kinh và được dựa trên các giải thích của mô hình xử lý và truyền thông thông tin trong một hệ thống thần kinh, chẳng hạn như mã hoá thần kinh để cố gắng để xác
định các mối quan hệ giữa các kích thích khác nhau và các phản ứng liên quan đến thần kinh trong não.
Nhiều kiến trúc học sâu khác nhau như mạng neuron sâu, mạng neuron tích chập sâu, mạng niềm tin sâu và mạng neuron tái phát đã được áp dụng cho các lĩnh vực như thị giác máy tính, tự động nhận dạng giọng nói, xử lý ngôn ngữ tự nhiên, nhận dạng âm thanh ngôn ngữ và tin y sinh, chúng đã được chứng minh là tạo ra các kết quả rất tốt đối với nhiều nhiệm vụ khác nhau. Hình 3.1 dưới đây mô tả mối quan hệ giữa Trí tuệ nhân tạo, Học máy và Học Sâu cũng như các mộc thời gian phát triển của chúng [2].
Hình 3.1: Mối quan hệ giữa AI, Machine Learning và Deep Learning Một số kiến trúc học sâu thông dụng:
Mạng nơ-ron hồi quy (Recurrent Neural Network – RNN): là một trong những kiến trúc mạng cơ bản mà từ đó các kiến trúc học sâu khác được xây dựng.
RNN bao gồm một tập hợp phong phú các kiến trúc học sâu. Chúng có thể sử dụng trạng thái bên trong (bộ nhớ) để xử lý các chuỗi đầu vào có độ dài thay đổi.
Giả sử rằng RNN có một bộ nhớ, mọi thông tin đã xử lý được thu thập, lưu trữ và sử dụng để tính toán kết quả cuối cùng. Hơn nữa, mạng lặp lại có thể có các kết nối phản hồi vào các lớp trước (hoặc thậm chí vào cùng một lớp). Phản hồi này cho phép nó duy trì bộ nhớ của đầu vào trong quá khứ và giải quyết vấn đề kịp thời. Hiện tại, có thể chỉ ra hai loại RNN:
- RNN hai chiều: Chúng hoạt động theo hai cách; lớp đầu ra có thể nhận đồng thời thông tin từ trạng thái quá khứ và tương lai.
- RNN sâu: Có nhiều lớp, giúp cho mô hình học sâu có thể trích xuất nhiều thông tin phân cấp hơn.
Bộ nhớ dài-ngắn hạn (Long Short-Term Memory – LSTM): cũng là một loại mạng RNN, tuy nhiên LSTM có các kết nối phản hồi. Điều này có nghĩa là LSTM có thể xử lý không chỉ các điểm dữ liệu đơn lẻ (chẳng hạn như hình ảnh) mà còn toàn bộ chuỗi dữ liệu (chẳng hạn như tệp âm thanh hoặc video). LSTM bắt nguồn từ kiến trúc mạng nơ-ron và dựa trên khái niệm ô nhớ. Ô nhớ có thể giữ lại giá trị của nó trong một thời gian ngắn hoặc dài, điều này cho phép ô nhớ có thể ghi lại những gì cần thiết chứ không chỉ là giá trị được tính toán cuối cùng của nó. Một kiến trúc LSTM điển hình bao gồm một ô, một cổng đầu vào, một cổng đầu ra và một cổng quên. Ô ghi nhớ các giá trị trong những khoảng thời gian tùy ý, và ba cổng này điều chỉnh luồng thông tin ra vào ô. Cổng đầu vào kiểm soát khi thông tin mới có thể chảy vào bộ nhớ. Cổng đầu ra kiểm soát khi thông tin chứa trong ô được sử dụng trong đầu ra. Cổng quên kiểm soát khi một phần thông tin có thể bị quên, cho phép ô xử lý dữ liệu mới. Ngày nay, LSTM thường được sử dụng trong các lĩnh vực như nén văn bản, nhận dạng chữ viết tay, nhận dạng giọng nói, nhận dạng cử chỉ và chú thích hình ảnh…
Các đơn vị định kỳ có định mức (Gated Recurrent Unit – GRU): là một loại LSTM, sự khác biệt chính là GRU có ít tham số hơn LSTM. GRU được sử dụng cho các bộ dữ liệu nhỏ hơn, nơi chúng thể hiện hiệu suất tốt hơn.
Mạng nơ-ron tích chập (Convolutional Neural Network – CNN): Kiến trúc này thường được sử dụng để xử lý hình ảnh, nhận dạng hình ảnh và phân tích video. CNN có thể thu nhận một hình ảnh đầu vào, xác định đặc trưng của các khía cạnh/đối tượng khác nhau trong hình ảnh và có thể phân biệt một hình ảnh với những hình ảnh khác. Tên gọi 'tích chập' bắt nguồn từ một phép toán liên quan đến tích chập của các hàm khác nhau. CNN bao gồm một đầu vào và một lớp đầu ra, cũng như nhiều lớp ẩn. Các lớp ẩn của CNN thường bao gồm một loạt các lớp phức hợp. Đây là cách thức hoạt động của CNN: Đầu tiên, mạng nhận dữ liệu đầu vào, mỗi đầu vào (ví dụ: hình ảnh) sẽ đi qua một loạt các lớp tích chập với các bộ lọc khác nhau. Lớp điều khiển kiểm soát cách tín hiệu truyền từ lớp này sang lớp khác. Tiếp theo, bạn phải làm phẳng đầu ra và đưa nó vào lớp được kết nối đầy đủ, nơi tất cả các lớp của mạng được kết nối với mọi nơ-ron từ lớp trước đến các nơ-ron từ lớp tiếp theo. Kết quả là, bạn có thể phân loại đầu ra.
Mạng niềm tin sâu (Deep Belief Network – DBN): là một mạng nhiều lớp (bao gồm nhiều lớp ẩn) trong đó mỗi cặp lớp được kết nối là một mạng nơ-ron tuần hoàn ngẫu nhiên (Restricted Boltzmann Machine - RBM). Do đó, chúng ta có thể phát biểu rằng DBN là một chồng các RBM. DBNs sử dụng xác suất và học không giám sát để tạo ra kết quả đầu ra. Không giống như các mô hình khác, mỗi lớp trong DBN học toàn bộ đầu vào. Trong CNN, các lớp đầu tiên chỉ lọc đầu
vào cho các tính năng cơ bản và các lớp sau kết hợp lại tất cả các mẫu đơn giản mà các lớp trước tìm thấy.
Mạng xếp chồng sâu (Deep Stacking Network – DSN): bao gồm một mạng sâu, nhưng nó thực sự là một tập hợp các mạng sâu riêng lẻ. Mỗi mạng bên trong DSN có các lớp ẩn riêng để xử lý dữ liệu. Kiến trúc này được thiết kế nhằm mục đích cải thiện vấn đề đào tạo mô hình (là vấn đề khá phức tạp của mô hình học sâu truyền thống). Thông thường, DSN bao gồm ba hoặc nhiều mô-đun. Mỗi mô- đun bao gồm một lớp đầu vào, một lớp ẩn và một lớp đầu ra. Các mô-đun này được xếp chồng lên nhau, có nghĩa là đầu vào của một mô-đun nhất định dựa trên đầu ra của các mô-đun/lớp trước đó. Cấu trúc này cho phép các DSN tìm hiểu cách phân loại phức tạp hơn so với khả năng của một mô-đun.
3.2. Mạng nơ-ron tích chập (Convolutional neural network)
Những năm gần đây, sự phát triển của khoa học công nghệ đã mang lại nhiều thành tựu vượt bậc, đặc biệt là trong lĩnh vực trí tuệ nhân tạo. Trong đó phải kể đến người máy Alphago, AI trợ lý bác sĩ, xe tự hành.
Mạng nơ-ron tích chập (Convolutional Neural Network - CNN là một trong những mô hình học sâu tiên tiến giúp cho chúng ta xây dựng được những hệ thống thông minh với độ chính xác cao như hiện nay. Hình 3.2 dưới đây mô tả các thành phần trong kiến trúc truyền thống của mạng nơ-ron tích chập (CNN).
Hình 3.2: Các thành phần trong kiến trúc truyền thống của CNN 3.1.1. Kiến trúc
a. Tích chập (Convolution)
Tích chập được sử dụng đầu tiên trong xử lý tín hiệu số (Signal processing).
Nhờ vào nguyên lý biến đổi thông tin, các nhà khoa học đã áp dụng kĩ thuật này vào xử lý ảnh và video số. Để dễ hình dung, ta có thể xem tích chập như một cửa sổ trượt (sliding window) áp đặt lên một ma trận. Bạn có thể theo dõi cơ chế của tích chập qua hình minh họa bên dưới. Hình 3.1 dưới đây minh hoạ đầy đủ về tích chập (Convolution) [11].
Hình 3.3: Minh hoạ tích chập (Convolution) Dưới đây là một vài ví dụ của phép toán tích chập.
Ta có thể làm mờ bức ảnh ban đầu bằng cách lấy giá trị trung bình của các điểm ảnh xung quanh cho vị trí điểm ảnh trung tâm. Hình 3.4 thể hiện việc làm mờ ảnh bằng cách lấy giá trị trung bình các điểm ảnh lân cận [5].
Hình 3.4: Làm mờ ảnh bằng cách lấy giá trị trung bình các điểm ảnh lân cận Ngoài ra, ta có thể (độ dị biệt) giữa các điểm ảnh lân cận. Hình 3.5 dưới đây thể hiện việc phát hiện biên cạnh bằng cách tính vi phân [5].
Hình 3.5: Phát hiện biên cạnh bằng cách tính vi phân
b. Lớp gộp (Pooling Layer)
Lớp gộp (Pooling Layer) hay còn gọi là lớp tổng hợp thường được sử dụng giữa các lớp tích chập, với mục đích làm giảm kích thước dữ liệu nhưng vẫn giữ được các thuộc tính quan trọng. Cụ thể, lớp gộp làm giảm kích thước của dữ liệu bằng cách kết hợp các đầu ra của các cụm nơ-ron ở một lớp thành một nơ-ron duy nhất ở lớp tiếp theo. Lớp gộp có thể lấy giá trị lớn nhất hoặc giá trị trung bình để tính toán:
- Gộp cực đại (Max pooling) sử dụng giá trị lớn nhất từ mỗi cụm nơ-ron ở lớp trước với mục tiêu bảo toàn các đặc trưng đã phát hiện nên được sử dụng thường xuyên. Hình 3.6 dưới đây minh hoạ cho việc sử dụng phương pháp gộp tối đa [12].
Hình 3.6: Ví dụ minh hoạ lấy giá trị lớn nhất (Max pooling)
- Gộp trung bình (Average pooling) sử dụng giá trị trung bình từ mỗi cụm nơ-ron ở lớp trước với mục tiêu giảm kích thước của bản đồ đặc trưng (feature map) nên được sử dụng chủ yếu trong mạng LeNet. Hình 3.7 dưới đây minh hoạ cho việc sử dụng phương pháp gộp trung bình [12].
Hình 3.7: Ví dụ minh hoạ lấy giá trị trung bình (Average pooling)
c. Kết nối đầy đủ (Fully connected)
Sau khi dữ liệu được truyền qua các lớp tích chập và lớp gộp, mạng nơ-ron đã học được tương đối các đặc trưng của dữ liệu. Lớp kết nối đầy đủ (fully connected) nhận đầu vào là các dữ liệu về các đặc trưng này và kết hợp lại với nhau để đưa ra được dữ liệu đầu ra của mạng nơ-ron. Trong mô hình mạng CNNs, các lớp kết nối đầy đủ thường được tìm thấy ở cuối mạng và được dùng để tối ưu hóa mục tiêu của mạng ví dụ như độ chính xác của lớp. Hình 3.8 dưới đây minh hoạ về lớp kết nối đầy đủ [13].
Hình 3.8: Minh hoạ về kết nối đầy đủ (Fully connected) trong CNNs 3.1.2. Các siêu tham số của bộ lọc (hyper-parameter)
Các chiều của một bộ lọc
Một bộ lọc kích thước F×F áp dụng lên đầu vào chứa C kênh (channels) thì có kích thước tổng kể là F×F×C thực hiện phép tích chập trên đầu vào kích thước I×I×C và cho ra một bản đồ đặc trưng (feature map hay còn gọi là activation map) có kích thước O×O×1.
Hình 3.9: Minh hoạ các chiều của bộ lọc Độ trượt (Stride)
Trong các phép tính toán tích chập hoặc phép gộp, cửa số trượt (sliding windows) sẽ duyệt qua tất cả các ô của ma trận, sau mỗi lần thực hiện phép tính số pixel mà cửa sổ sẽ di chuyển gọi là độ trượt S ký hiệu. Hình 3.10 dưới đây minh hoạ về độ trượt (stride) S.
Hình 3.10: Minh hoạ về độ trượt (Stride)
![Hình 2.3 dưới đây thể hiện tác vụ xử lý ảnh với mô-đun Rigorous Orthorectification của phần mềm Envi [18]](https://thumb-ap.123doks.com/thumbv2/1libvncom/11361057.0/22.892.138.799.750.1126/hình-dưới-đây-thể-hiện-rigorous-orthorectification-phần.webp)
![Hình 2.7: Xử lý ảnh với Mô-đun Envi NITF [6]](https://thumb-ap.123doks.com/thumbv2/1libvncom/11361057.0/24.892.204.736.880.1144/hình-xử-lý-ảnh-mô-đun-envi-nitf.webp)