T1 612011049 BAB III
Teks penuh
Gambar
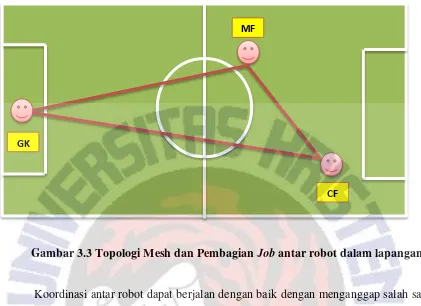
![Gambar 3.2 Mesh Topology[5].](https://thumb-ap.123doks.com/thumbv2/123dok/851158.470989/3.595.98.510.248.605/gambar-mesh-topology.webp)

Garis besar
Dokumen terkait
Pada percobaan ini yang akan dilakukan adalah menelfon dari kit SIM908 EVB, menerima panggilan datang (panggilan datang menerima status tunggu), panggilan tunggu
Perancangan tersebut meliputi perancangan mekanik robot, board utama mikrokontroler ATmega8, driver motor utama, driver motor lengan packbot dan untai yang lainnya
Plastik yang bergerak akan menahan penghalang sensor yang menandakan plastik tidak ang akan menutupi sehingga sinyal keluaran sensor dikirimkan pada
Bila PORTxn diset 1 pada saat pin terkonfigurasi sebagai pin output maka pin port akan berlogika 1.. Dan bila PORTxn diset 0 pada saat pin terkonfigurasi sebagai pin output maka
Pada saat BCD output memberikan data BCDnya ke input decoder IC 3161E yaitu pin inputannya pada pin 6,2,1 dan 7 untuk digit pertama (LSD) maka digit driver yang aktif
Menyusun RPP (Rencana Pelaksanaan Pembelajaran) sesuai dengan materi yang akan dilakukan untuk penelitian.. Menyiapkan kelengkapan yang akan dibutuhkan dalam
Tekan tombol ON/OFF untuk menghidupkan alat, setelah alat hidup sensor akan membaca tekanan udara yang dihembuskan oleh seseorang dan sinyal output dari sensor yang
Arduino uno merupakan board berbasis mikrokontroler pada Atmega328 yang mana mempunyai 14 digital input / output pin (dimana 6 pin dapat digunakan sebagai output PWM), 6
