Implementasi kendali Fuzzy Untuk Kestabilan Ketinggian Quadcopter
Teks penuh
Gambar

Dokumen terkait
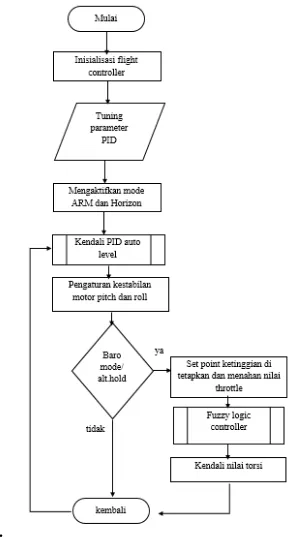
Board KK2.0 merupakan kontroler terbang dengan fitur yang berguna untuk memudahkan pengguna untuk mengontrol QuadCopter.. Akan tetapi fitur pengunci ketinggian
Makalah ini menguraikan implementasi suatu sistem kendali yang berbasis logika fuzzy pada pengendalian tegangan keluaran generator dengan sumber eksitasi konverter AC-DC PWM..
Dari hasil penelitian dan pembahasan, dapat disimpulkan bahwa proses kendali dengan sistem penalaan parameter kendali PID dengan logika Fuzzy yang diaplikasikan
Hasil pengujian jarak tempuh quadcopter dengan setpoint berbeda-beda menunjukan bahwa sistem kendali dengan menggunakan metode PID memiliki tingkat kesalahan yang
gaussian noise yang ditunjukkan oleh Gambar 4.21 terlihat bahwa sistem masih berada pada daerah toleransi kestabilan dengan performansi kendali logika fuzzy yang lebih
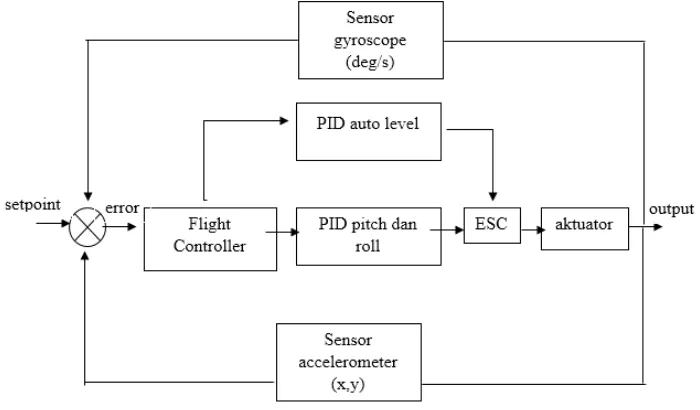
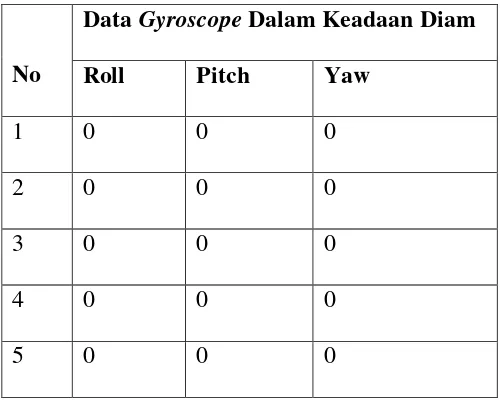
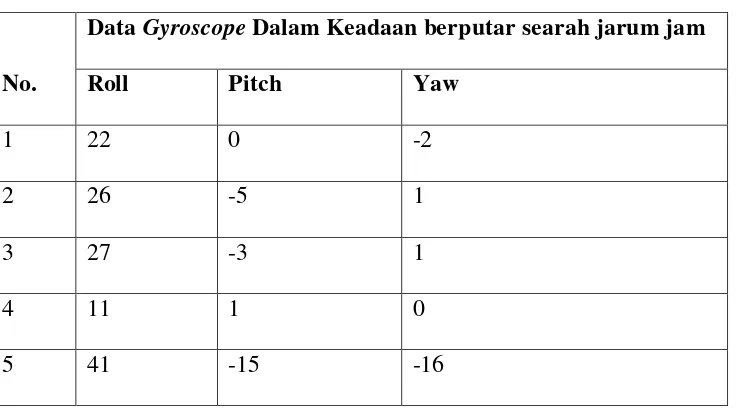
Ketika mendapat gangguan dari luar, agar quadcopter mampu mengembalikan posisi roll dan pitch sesuai dengan referensi yang diberikan, maka diperlukan perancangan kendali
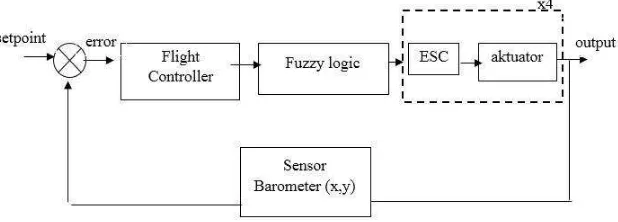
Pada sistem kontrol ini menggunakan metode logika fuzzy agar mendapatkan kendali yang meminimalisir tingkat error posisi dan mempersingkat waktu respon serta kalman
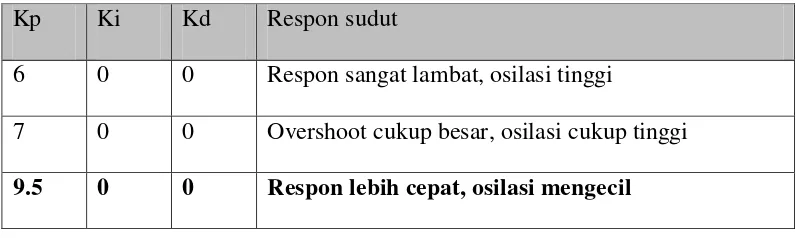
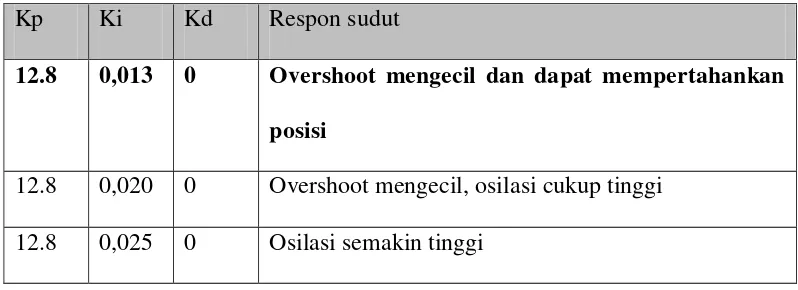
Metode kendali yang akan digunakan diptimalkan dengan logika fuzzy yang dapat menala secara mandiri nilai kontstanta Kp, Ki, dan Kd pada PID sehingga respon
