PENGENDALIAN LEVEL KETINGGIAN AIR DENGAN
MENGGUNAKAN KENDALI LOGIKA FUZZY
Laporan ini disusun untuk memenuhi salah satu syarat dalam menempuh pendidikan program sarjana S1 di Jurusan Teknik Elektro
Oleh :
Setiawan Ari Wibowo 13105005
Dosen Pembimbing : Muhammad Aria, M.T.
PROGRAM STUDI TEKNIK ELEKTRO
FAKULTAS TEKNIK DAN ILMU KOMPUTER
UNIVERSITAS KOMPUTER INDONESIA
BANDUNG
Assalamu’alaikum Wr.Wb, Dengan mengucapkan puji syukur terhadap Allah SWT, yang telah melimpahkan rahmat, hidayah dan karunianya, serta memberikan pertolongan dan perlindungan kepada kita semua serta shalawat dan salam tak lupa penulis iringkan kepada nabi kami Muhammad SAW, sehingga penulis dapat menyelesaikan tugas akhir yang berjudul :
PENGENDALIAN LEVEL KETINGGIAN AIR DENGAN MENGGUNAKAN KENDALI LOGIKA FUZZY
Tugas akhir ini merupakan kewajiban bagi setiap mahasiswa Universitas Komputer Indonesia (UNIKOM) dengan tujuan untuk memenuhi persyaratan untuk memperoleh kelulusan pada program Sarjana S1 Jurusan Teknik Elektro Universitas Komputer Indonesia (UNIKOM).
Penulis menyadari masih banyak kekurangan dalam penulisan dan perancangan tugas akhir ini, oleh karena itu besar harapan penulis untuk menerima saran dan keritik dari para pembaca. Semoga tugas akhir ini dapat bermanfaat bagi mahasiswa Universitas Komputer Indonesia (UNIKOM) khususnya dan masyarakat pada umumnya.
Bandung, Agustus 2009
JUDUL... i
HALAMAN PENGESAHAN... ii
ABSTRAK... iv
ABTRACK... v
KATA PENGANTAR... vi
UCAPAN TERIMAKASIH ... vii
DAFTAR ISI... ix
DAFTAR GAMBAR... xii
DAFTAR TABEL... xv
1.5 Metodologi Penelitian ... 3
1.6 Sistematika Penulisan ... 3
BAB II DASAR TEORI... 5
2.1 Pengenalan LabVIEW... 5
2.2 Fuzzy Logic... 8
2.2.1 Fungsi Keanggotaan... 10
2.2.2 Operasi Dasar Untuk Operasi Keanggotaan Fuzzy... 13
2.2.3 Sistem Inferensi Fuzzy Metode Mamdani... 14
2.2.4 Defuzzifikasi... 15
2.3Analog To Digital converter (ADC) ... 15
2.3.1 Mode Operasi ADC0804... 18
2.4Motor Stepper... 19
2.5Potensiometer... 25
2.9IC Regulator... 31
BAB III PERANCANGAN SISTEM... 32
3.1Gambaran Umum... 32
3.2Perancangan Sistem... 34
3.3Perancangan Perangkat Keras (Hardware)... 35
3.3.1 Potensiometer... 35
3.3.2 Analog To Digital Converter (ADC)... 37
3.3.3 Multiplekser... 40
3.3.4 Perancangan Driver Motor Stepper... 41
3.3.5 Komunikasi Data Parallel... 43
3.3.6 Rangkaian Catu Daya... 46
3.4Perancangan Perangkat Lunak (software)... 47
3.4.1 Perancangan Kendali Logika Fuzzy... 48
3.4.2 Perancangan Program Dalam Perangkat Lunak (software) LabVIEW... 54 BAB IV ANALISA DAN PENGUJIAN SISTEM... 64 4.1Pendahuluan... 64
4.2Tujuan Pengukuran dan Pengujian... 64
4.3Pengujian Rangkaian Sensor Potensoimeter... 64
4.4Pengujian Rangkaian Analog To Digital Converter (ADC)... 67
4.5Pengujian Rangkaian Multiplekser... 69
4.6Pengujian Motor Stepper... 70
4.7Pengujian Driver Motor Stepper... 70
4.8Pengujian Rangkaian Catu Daya... 72
4.9Pengujian Perangkat Lunak (software)... 73
4.9.1 Pengujian Program Triangel.VI... 73
4.9.2 Pengujian Program Trapezium.VI... 74
4.9.6 Pengujian Program Fuzzy.VI... 80 4.9.7 Pengujian Program Pengontrol Fuzzy.VI...
84
BAB V PENUTUP... 90 5.1 Kesimpulan... 90 5.2 Saran... 92
Pada tugas akhir ini akan dibuat suatu alat untuk mengontrol dan memonitoring level ketinggian air pada tangki proses, proses pengontrolan level ketinggian air menggunakan kendali logika fuzzy yang dirancang untuk memperkecil lonjakan maksimum (overshoot) dan waktu naik (rise time) dengan masing-masing masukan atau keluaran dibagi dalam tujuh keanggotaan fuzzy, yaitu negatif besar (NB), negatif menengah (NM), negatif kecil (NS), zero (Z), positif besar (PB), positif menengah (PM) dan positif kecil (PS), kemudian diaplikasikan pada program LabVIEW. Untuk mendeteksi level ketingian air digunakan sensor potensiometer yang kemudian terhubung ke rangkaian analog to digital converter (ADC) untuk mengubah data analog dari sensor menjadi data digital dalam bentuk biner, selanjutnya data-data dari analog to digital converter (ADC) dengan lebar 8-bit akan di keluarkan menjadi satu keluaran melalui rangkaian multiplekser, data dari multiplesker ini akan masuk ke dalam komputer melalui komunikasi parallel untuk diolah melalui program LabVIEW yang kemudian akan memonitoring level ketinggian air dan mengontrol putaran motor stepper sehingga level ketinggian air yang diharapkan (setpoint) tercapai. Pengujian dilakukan untuk mengetahui performansi dari sistem, dari hasil pengujian terbukti bahwa sistem memiliki overshoot dan waktu naik (rise time) yang kecil, contoh pada saat setpoint 8 sistem memiliki overshoot 2.5% dan rise time 8909 ms.
The final project is present to made an interface that can be use controling and supervise height water level on the plant, height water level controling process make use of fuzzy logic control to build for minimize overshoot and rise time with each input or output divide sevent membership of fuzzy inside, that is large negatif (NB), middle negatif (NM), little negatif (NS), zero (Z), large positif (PB), middle positif (PM) and little positif (PB), than to applying on the labVIEW program. For detect is height water level using potensiometer sensor then coneccted to the ADC (analog to digital converter) circuit to change analog data be digital data inside binary shape, furthermore data from the ADC (analog to digital converter) with width 8-bit will be closed into one output by multiplekser circuit, this data from multiplekser circuit be included to computer inside by parallel communication to processing from LabVIEW program then will be supervise height water level and controling of motor stepper until hope water height level will be get. Testing doing for knowing performansi of system, from the result of system proved have a little overshoot and rise time, example to setpoint 8 system have overshoot 2.5 % and rise time 8909 ms.
PENGENDALIAN LEVEL KETINGGIAN AIR DENGAN
MENGGUNAKAN KENDALI LOGIKA FUZZY
Laporan ini disusun untuk memenuhi salah satu syarat dalam menempuh pendidikan program sarjana S1 di Jurusan Teknik Elektro
Oleh :
Setiawan Ari Wibowo NIM : 13105005
Disetujui dan disahkan di Bandung pada tanggal :
Mengetahui,
Dosen Pembimbing
Muhammad Aria, M.T. NIP. 4127 70 04 008
Ketua Jurusan Teknik Elektro
PENGENDALIAN LEVEL KETINGGIAN AIR DENGAN
MENGGUNAKAN KENDALI LOGIKA FUZZY
Laporan ini disusun untuk memenuhi salah satu syarat dalam menempuh pendidikan program sarjana S1 di Jurusan Teknik Elektro
Oleh :
Setiawan Ari Wibowo NIM : 13105005
Disetujui dan disahkan di Bandung pada tanggal :
Mengetahui,
Penguji I
Tri Rahajoeningroem, M.T. NIP. 4127 70 04 015
Penguji II
Puji syukur terhadap kehadirat Allah SWT yang telah memberikan rahmat dan hidayahnya sehingga penulis dapat menyelesaikan tugas akhir ini, dalam penyelesaian tugas akhir ini penulis mendapatkan bimbingan, dukungan dan bantuan dari beberapa pihak, oleh karena itu pada kesempatan kali ini penulis mengucapkan terima kasih sebesar-sebesarnya kepada :
1. Allah SWT yang telah memberikan kekuatan, rahmat, perlindungan dan hidayahnya sehingga penulis dapat menyelesaikan tugas akhir ini.
2. Mama dan Ayah tercinta yang telah memberikan dukungan dalam bentuk motivasi, doa, materil, kasih sayang dan semuanya yang tidak akan pernah terukur nilainya dengan apapun.
3. Kedua adikku Titan dan Andri tercinta (kalian merupakan sumber motivasiku).
4. Bapak Muhammad Aria, M.T. selaku dosen pembimbing dan ketua Jurusan Teknik Elektro yang telah memberikan banyak ilmu, pengarahan, bimbingan dan motivasi selama mengerjakan tugas akhir ini.
5. Semua Dosen Jurusan Teknik Elektro yang telah memberikan banyak ilmu, terutama Ibu Tri Rahajoeningroem, M.T dan Ibu Levy Olivia, M.T. 6. Seluruh Dosen, Asisten dan Karyawan Universitas Komputer Indonesia
(UNIKOM)
Teknik dan Ilmu Komputer Universitas Komputer Indonesia (UNIKOM). 9. Semua teman-teman yang telah memberikan dukungan berupan motivasi,
materil dan alat transportasi sehingga membantu kelancaran penulis dalam menyelasikan tugas akhir ini, terutama Suryono, Agus, Rahman dan Ongko yang telah banyak membantu dan memberikan inspirasi dalam perancangan perangkat keras (hardware) dan perancangan perangkat lunak (software).
10.Semua teman-teman kelas 05-TE1 angkatan 2005 yang telah memberikan dukungan.
11.Semua pihak yang telah membantu penulis dalam menyelesaikan tugas akhir ini yang tidak dapat penulis sebutkan satu persatu.
Semoga Allah SWT membalas semua amalan yang telah dilakukan dan apabila penulis ada kesalahan mohon dimaafkan sebesar-besarnya.
Bandung, Agustus 2009
1.1 Latar Belakang
Pada tempat-tempat penampungan air seringkali diperlukan suatu mekanisme untuk mengontrol ketinggian permukaan air. Seringkali mekanisme tersebut masih berupa cara-cara manual, semisal dengan sistem keran yang digerakkan secara manual oleh manusia dengan cara memutar atau menggerakkan keran ke atas atau ke bawah. Namun sistem keran secara manual ini memiliki kelemahan yaitu pemborosan air dikarenakan kelalaian menutup keran dan jika tempat penampungan air tersebut sulit dijangkau oleh manusia, misalnya diatas atap bangunan atau jika malam hari dan penerangan sekitar tempat penampungan air tersebut kurang. Sehingga diperlukan suatu mekanisme pengendalian level ketinggian air secara otomatis yaitu dengan memanfaatkan sensor potensiometer untuk mendeteksi ketinggian air, selanjutnya agar mekanisme buka tutup keran dapat bekerja dengan baik maka diperlukan suatu kendali yang tepat untuk meminimalkan kesalahan pada sistem suatu waktu, maka sistem pengontrol fuzzy baik digunakan dalam sistem ini, alasan menggunakan sistem pengontrol fuzzy adalah sistem logika fuzzy mudah dimengerti dan konsep matematis yang mendasari penalaran fuzzy sangat sederhana dan mudah dimengerti.
1.2 Maksud dan Tujuan
Maksud dari pembuatan Tugas Akhir ini adalah untuk membuat perangkat keras pengatur level ketinggian air dengan mengimplementasikan kendali logika fuzzy dalam software LabVIEW.
1.3 Rumusan Masalah
Permasalahan yang akan ditangani dalam pembuatan tugas akhir ini adalah bagaimana agar dapat mengontrol putaran motor stepper berdasarkan perubahan tegangan pada sensor potensiometer dan memonitor level ketinggian air dalam software LabVIEW.
Masalah yang harus diperhatikan adalah: 1. Kelinieran dari sensor yang digunakan. 2. Ketepatan pembacaan ADC.
3. Penggunaan kendali logika fuzzy dalam software LabVIEW.
1.4 Batasan Masalah
Batasan masalah dalam pembuatan tugas akhir ini adalah :
1. Pengendalian hanya dilakukan pada putaran motor stepper, untuk mengendalikan level ketinggian air.
2. Ketinggian air yang akan dikendalikan, yaitu minimum 5 cm dan maksimum 15 cm.
1.5 Metodologi Penelitian
Dalam mengumpulkan data untuk menyelesaikan penulisan laporan ini, penulis menggunakan teknik mengumpulkan data seperti di bawah ini.
1. Studi literatur dan pustaka.
Teknik ini merupakan pengumpulan dasar teori dari sistem yang akan dibuat, sehingga sistem tersebut dapat dianalisa.
2. Perancangan sistem.
Teknik yang kedua adalah melakukan perancangan dan pembuatan perangkat lunak dan perangkat keras.
3. Pengujian alat dan analisa.
Teknik ini bertujuan untuk menganalisa dan menguji perangkat lunak dan perangkat keras yang telah dirancang.
1.6 Sistematika Penulisan
Untuk mengetahui gambaran mengenai penulisan tugas akhir ini, maka di bawah ini akan dijelaskan mengenai sistematika penulisan tugas akhir adalah sebagai berikut :
BAB I PENDAHULUAN
BAB II DASAR TEORI
Bab ini berisi teori-teori yang menunjang dalam pembuatan dan perancangan sistem, sebagai acuan dalam pembuatan perangkat keras dan perangkat lunak.
BAB III PERANCANGAN SISTEM
Bab ini menguraikan tentang perancangan dan implementasi dari sistem yang dibangun, yang meliputi proses pembuatan hardware dan software.
BAB IV ANALISA DAN PENGUJIAN SISTEM
Bab ini berisi tentang analisa serta pengujian dari sistem yang telah dibuat.
BAB V KESIMPULAN DAN SARAN–SARAN
BAB II DASAR TEORI
2.1 Pengenalan LabVIEW
LabVIEW adalah sebuah software pemograman yang diproduksi oleh National
instruments dengan konsep yang berbeda. Seperti bahasa pemograman lainnya
yaitu C++, matlab atau Visual basic , LabVIEW juga mempunyai fungsi dan
peranan yang sama, perbedaannya bahwa labVIEW menggunakan bahasa
pemrograman berbasis grafis atau blok diagram sementara bahasa pemrograman
lainnya menggunakan basis text. Program labVIEW dikenal dengan sebutan Vi
atau Virtual instruments karena penampilan dan operasinya dapat meniru sebuah instrument. Pada labVIEW, user pertama-tama membuat user interface atau front panel dengan menggunakan control dan indikator, yang dimaksud dengan kontrol adalah knobs, push buttons, dials dan peralatan input lainnya sedangkan yang dimaksud dengan indikator adalah graphs, LEDs dan peralatan display lainnya. Setelah menyusun user interface, lalu user menyusun blok diagram yang berisi kode-kode VIs untuk mengontrol front panel. Software LabVIEW terdiri dari tiga komponen utama, yaitu :
1. front panel
front panel adalah bagian window yang berlatar belakang abu-abu serta
mengandung control dan indikator. front panel digunakan untuk
membangun sebuah VI, menjalankan program dan mendebug program.
Gambar 2.1 Front Panel
2. Blok diagram dari Vi
Blok diagram adalah bagian window yang berlatar belakang putih berisi
source code yang dibuat dan berfungsi sebagai instruksi untuk front panel. Tampilan dari blok diagram dapat lihat pada Gambar 2.2.
3. Control dan Functions Pallete
Control dan Functions Pallete digunakan untuk membangun sebuah Vi. a. Control Pallete
Control Pallete merupakan tempat beberapa control dan indikator pada front panel, control pallete hanya tersedia di front panel, untuk menampilkan control pallete dapat dilakukan dengan mengkilk windows >> show control pallete atau klik kanan pada front panel. Contoh control pallete ditunjukkan pada Gambar 2.3.
Gambar 2.3 Control Palette
4. Functions Pallete
Functions Pallete di gunakan untuk membangun sebuah blok diagram, functions pallete hanya tersedia pada blok diagram, untuk menampilkannya dapat dilakukan dengan mengklik windows >> show control pallete atau
Gambar 2.4 Functions pallete
2.2 Fuzzy Logic
Fuzzy logic adalah suatu cara untuk memetakan suatu ruang input ke dalam suatu
ruang output. Fuzzy logic menyediakan cara sederhana untuk menggambarkan
kesimpulan pasti dari informasi yang ambigu, samar -samar, atau tidak tepat.
Sedikit banyak, fuzzy logic menyerupai pembuatan keputusan pada manusia
dengan kemampuannya untuk bekerja dari data yang ditafsirkan dan mencari
solusi yang tepat. Fuzzy logic pada dasarnya merupakan logika bernilai banyak (multivalued logic) yang dapat mendefinisikan nilai diantara keadaan konvensional seperti ya atau tidak, benar atau salah, hitam atau putih, dan
sebagainya. Penalaran fuzzy menyediakan cara untuk memahami kinerja dari
sistem dengan cara menilai input dan output system dari hasil pengamatan.
Konsep Fuzzy Logic diperkenalkan oleh Prof. Lotfi Zadeh dari Universitas
California di Berkeley pada 1965, dan dipresentasikan bukan sebagai suatu
metodologi kontrol, tetapi sebagai suatu cara pemrosesan data dengan
memperkenankan penggunaan partial set membership dibanding crisp set
komputer yang tidak cukup pada saat itu. Profesor Zadeh berpikir bahwa orang
tidak membutuhkan kepastian, masukan informasi numerik, dan belum mampu
terhadap kontrol adaptif yang tinggi.
Konsep fuzzy logic kemudian berhasil diaplikasikan dalam bidang kontrol oleh E.H. Mamdani. Sejak saat itu aplikasi fuzzy berkembang kian pesat. Di tahun 1980an negara Jepang dan negara – negara di Eropa secara agresif membangun
produk nyata sehubungan dengan konsep logika fuzzy yang diintegrasikan dalam
produk–produk kebutuhan rumah tangga seperti vacum cleaner, mesin cuci,
microwave oven dan kamera Video.
Ada beberapa alasan mengapa orang menggunakan logika fuzzy :
1. Konsep logika fuzzy mudah dimengerti, konsep matematis yang mendasari
penalaran fuzzy sangat sederhana dan mudah di mengerti 2. Logika fuzzy sangat fleksibel.
3. Logika fuzzy memiliki toleransi terhadap data-data yang tidak tepat.
4. Logika fuzzy mampu memodelkan fungsi-fungsi non linear yang sangat
kompleks
5. Logika fuzzy dapat membangun dan mengaplikasikan
pengalaman-pengalaman para pakar secara langsung tanpa harus melalui proses
pelatihan.
6. Logika fuzzy dapat bekerja sama dengan teknik-teknik kendali secara
konvensional.
Sebelum menggunakan logika fuzzy, biasanya komputasi menggunakan himpunan crisp. Pada himpunan tegas (crips), nilai keanggotaan suatu item x dalam suatu himpunan A, yang sering ditulis dengan µA [x], memiliki 2 kemungkinan, yaitu :
-
satu (1), yang berarti bahwa suatu item menjadi anggota dalam suatuhimpunan.
-
nol (0), yang berarti bahwa suatu item tidak menjadi anggota dalamsuatu himpunan.
Tetapi penggunaan himpunan crips untuk menyatakan suatu keanggotaan
terkadang sangat tidak adil, adanya perubahan kecil saja pada suatu nilai
mengakibatkan perbedaan kategori yang cukup signifikan. Contoh jika variabel
umur dibagi menjadi 2 kategori yaitu umur < 40 tahun disebut muda dan ≥ 40
disebut tua, maka bagaimana jika seseorang berusia 40 tahun kurang 1 hari?
Himpunan fuzzy digunakan untuk mengantisipasi hal tersebut, seberapa besar
eksistensi dalam suatu himpunan dapat dilihat pada nilai keanggotaannya.
2.2.1 Fungsi Keanggotaan
Fungsi keanggotaan (membership functions) adalah suatu kurva yang
menunjukkan pemetaan titik-titik input data ke dalam nilai keanggotaannya
(sering juga di sebut dengan derajat keanggotaan) yang memiliki interval antara 0
sampai 1, salah satu cara yang dapat digunakan untuk mendapatkan nilai
keanggotaan adalah dengan melalui pendekatan fungsi ada beberapa fungsi yang
kekanan dengan nilai domain yang lebih tinggi, kemudian setelah beberapa
saat mencapai derajat keanggotaan tertinggi dengan nilai doamin yang sama,
kemudian nilai domain turun kembali menuju kekiri dengan nilai domain
yang lebih rendah, seperti terlihat pada Gambar 2.6.
………...……….……..….(2.3)
Fungsi keanggotaan trapezoid , dispesifikasikan oleh empat parameter, yaitu
(a, b, c, d) seperti terlihat dalam persamaan (2.3), representasi fungsi keanggotaan trapezoid ditunjukkan pada Gambar 2.6
Gambar 2.6 Representasi Fungsi Keanggotaan Trapezoid
Alternatif lain dari persamaan (2.3) adalah dengan menggunakan min dan max seperti berikut :
2.2.2 perator Dasar Untuk Operasi Keanggotaan Fuzzy
mem sikan,
zzycomplement
salah satu operasi yang digunakan pada fuzzy complement adalah operator
Persamaan matematis fuzzy complement
……….………... (2.5)
b. fuzzy interaction
salah satu operasi umum yang digunakan pada fuzzy interaction adalah
operator MIN atau operator AND, operasi ini diperoleh dengan mengambil
nilai keanggotaaan terkecil diantara elemen-elemen dari himpunan yang
bersangkutan.
atis fuzzy interaction
µ (x) = min [µ (x),µ (x)]..……….………...…….(2. 6)
c. fuzzy
salah satu operasi umum yang digunakan pada fuzzy interaction adalah
operato r OR. Operasi ini diperoleh dengan mengambil
O
Untuk odifikasi himpunan fuzzy , ada beberapa operasi yang didefini
yaitu :
a. fu
NOT. Operasi ini mengurangkan nilai keanggotaan elemen pada himpunan
yang bersangkutan dari 1.
µ (x) = 1 -µ (x)……...………
Persamaan matem
B
union
r MAX atau operato
nilai keanggotaan terbesar diantara elemen-elemen dari himpunan yang
Persamaan matematis fuzzy union
µ B(x) = max [µ (x),µ (x)]………...…………....……….(2.7)
2.2.3 Sistem Inferensi Fuzzy Metode Mamdani
Meka menggunakan sistem inferensi fuzzy
metode ma
Gambar 2.7 Mekanisme Inferensi Fuzzy Model Mamdani
Gambar 2.7 menunjukkan inferensi fuzzy model mamdani untuk dua rule. Proses dari inferensi tersebut dapat dijelaskan sebagai berikut :
1. terdapat dua masukan yaitu x dan y, masukan x akan dipetakan pada
membership , demikian
µ dan µ sehingga
diperoleh nilai μ , demikian juga pada µ dan µ sehingga diperoleh nilai μ .
nisme proses pengontrolan fuzzy
mdani adalah seperti terlihat pada Gambar 2.7.
function dan sehingga diperoleh nilai µ dan µ
juga masukan y dipetakan pada membership function dan .
3. dari nilai μ . dan μ . akan diperoleh besarnya daerah yang terarsir dari
membership function dan .
4. kedua daerah yang diarsir tersebut lalu digabungkan menjadi kurva C’ yang
kemudian akan dilakukan defuzzifikasi untuk memperoleh nilai .
2.2.4 Defuzzifikasi
defuzzifikasi dilakukan dengan menghitung koordinat pusat massa dari
bentuk fungsi keanggotaan C’. Defuzzifikasi pada komposisi aturan mamdani
mbil titik pusat daerah fuzzy. Secara umum
persamaan defuzzifikasi dituliskan pada persamaan 2.8 dibawah ini.
µ
=
Proses defuzzifikasi berfungsi untuk merubah nilai fuzzy menjadi nilai crisp. Proses
dengan menggunakan metode centroid. Dimana pada metode ini, solusi crisp
diperoleh dengan cara menga
µ
µ
atau µ
=
∑ µ
∑ ………...………(2.8)
2.3 Analog To Digital Converter (ADC)
Analog To Digital Converter (ADC) adalah sebuah piranti yang dirancang untuk mengubah sinyal-sinyal analog menjadi bentuk sinyal digital. IC ADC 0804
dianggap dapat memenuhi kebutuhan dari rangkaian yang akan dibuat. IC jenis ini
bekerja secara cermat dengan menambahkan sedikit komponen sesuai dengan
spesifikasi yang harus diberikan dan dapat mengkonversikan secara cepat suatu
masukan tegangan. Hal-hal yang juga perlu diperhatikan dalam penggunaan ADC
ini adalah tegangan maksimum yang dapat dikonversikan oleh ADC dari
ketepatan dan waktu konversinya. Ada banyak cara yang dapat digunakan untuk
ital yang nilainya proposional. Jenis
ana perlu sesuai dengan kondisi yang telah
ditentukan. Dengan rangkaian yang paling cepat, konversi akan diselesaikan
sesudah 8 clock, dan keluaran digital to analog merupakan nilai analog yang ekivalen dengan nilai register SAR. Apabila konversi telah dilaksanakan, rangkaian kembali mengirim sinyal selesai konversi yang berlogika rendah. Sisi
turun sinyal ini akan menghasilkan data digital yang ekivalen ke dalam register buffer. Dengan demikian, output digital akan tetap tersimpan sekalipun akan dimulai siklus konversi yang baru.
mengubah sinyal analog menjadi sinyal dig
ADC yang biasa digunakan dalam perancangan adalah jenis Successive
Approximation Convertion (SAR) atau pendekatan bertingkat yang memiliki waktu konversi jauh lebih singkat dan tidak tergantung pada nilai masukan
analognya atau sinyal yang akan diubah. Gambar 2.8, memperlihatkan diagram
blok ADC tersebut.
Gambar 2.8 Diagram Blok ADC
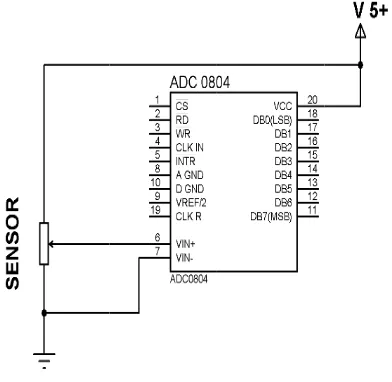
Gambar 2.9 ADC 0804
C ADC 0804 mempunyai dua input analog,
in(+) dan Vin(-), sehingga dapat menerima input diferensial. Input analog sebenarnya (Vin) sama dengan selisih antara tegangan-tegangan yang
dihubungkan dengan ke dua pin input yaitu . Kalau input
analog berupa tegangan tunggal, tegangan ini harus dihubungkan dengan
sedangkan ditanahkan. Untuk operasi normal, ADC 0804 menggunakan
= +5 Volt sebagai referens. Dalam hal ini jangkauan input analog mulai dari 0 Volt sampai 5 Volt (skala penuh), karena IC ini adalah SAC 8-bit, maka
resolusinya adalah sebagai berikut : Seperti terlihat pada Gambar 2.9, I
V
2.3.1 Mode Operasi ADC0804
1. Mode operasi kontinyu
Agar ADC0804 dapat dioperasikan pada mode operasi kontinyu (proses
membaca terus menerus dan tanpa proses operasi jabat tangan), maka
penyemat CS dan RD ditanahkan, sedangkan penyemat WR dan INTR tidak
ungkan kemanapun. Prinsip kerja oper
memulai konversi ketika INTR kembali tidak aktif (logika ‘1’). Setelah
proses konversi selesai, INTR akan aktif (logika ‘0’). Untuk memulai
konversi pertama kali WR harus ditanahkan terlebih dahulu, hal ini
digunakan untuk me-reset SAR. Namun pada konversi berikutnya untuk
akan sinyal INTR saat aktif (logika ‘0’) dan
ak aktif (logika ‘1’). Ketika selesai konversi data
2.
dihub asi kontinyu ini yaitu ADC akan
me-reset SAR dapat menggun mulai konversi saat tid
hasil konversi akan dikeluarkan secara langsung dari buffer untuk dibaca karena RD ditanahkan. Saat sinyal INTR aktif, sinyal ini digunakan untuk
me-reset SAR. Saat INTR kembali tidak aktif (logika ‘1’) proses konversi dimulai kembali.
Mode Operasi Hand-Shaking
ADC0804 dioperasikan pada mode hand-shaking . Agar ADC dapat bekerja, CS harus berlogika ‘0’. Ketika WR berlogika ‘0’, register SAR akan direset, sedangkan ketika sinyal WR kembali ‘1’, maka proses konversi segera
dimulai. Selama konversi sedang berlangsung, sinyal INTR akan tidak aktif
(berlogika ‘1’) sedangkan saat konversi selesai ditandai dengan aktifnya
sinyal INTR (logika‘0’). Setelah proses konversi selesai data hasil konversi
dikeluarkan dengan mengirim sinyal RD berlogika ‘0’. Setelah adanya
sinyal sinyal RD ini, maka sinyal INTR kembali tidak aktif.
ADC digunakan sebagai rangkaian yang mengubah sinyal analog menjadi
sinyal digital. Dengan menggunakan ADC, kita dapat mengamati perubahan
sinyal analog seperti : perubahan temperatur , kepekaan asap, temperatur
udara, kecepatan angin, berat benda, kadar asam (pH) dan lain-lain, yang
semuanya dapat di amati melalui sensornya masing-masing. Rangkaian
analog ke digital ini dimaksudkan untuk mengubah data tegangan yang
dihasilkan oleh rangkaian sensor menjadi data digital agar dapat dieksekusi
oleh rangkaian mikrokontroler.
2.4 Motor Stepper
Motor stepper adalah alat yang mengubah pulsa listrik yang diberikan menjadi
gerakan motor discret (berlainan) yang disebut step (langkah). Satu putaran motor memerlukan 360 derajat dengan jumlah langkah yang tertentu perderjatnya.
Ukuran kerja dari motor stepper biasanya diberikan dalam jumlah langkah
per-putaran per-detik. Motor stepper mempunyai kecepatan dan torsi yang rendah
namun memiliki kontrol gerakan posisi yang cermat, hal ini dikarenakan motor
stepper memiliki beberpa segment kutub kumparan. Motor ini sering kita
gunakan untuk menggerakan lengan robot, gerak linier plotter. Gambar dari
Gambar 2.10 Motor Stepper
er yaitu bipolar dan unipolar, sebuah
motor stepper berputar 1 step apabila terjadi perubahan arus pada koil-koilnya,
mengubah pole-pole magnetik disekitar pole-pole stator. Perbedaan utama antara bipolar dan unipolar adalah :
1. Bipolar :
- Arus pada koil dapat berbolak-balik untuk m ngubah arah putaran motor.
- Lilitan motor hanya satu dan dialiri arus dengan arah bolak-balik.
2. Unipolar :
- Arus mengalir satu arah, dan perubahan arah motor tergantung dari
lilitan (koil) yang dialiri arus.
- Lilitan terpisah dalam dua bagian dan masing-masing bagiannya
hanya dilewati arus dalam satu arah saja.
Kelemahan jenis bipolar adalah bahwa rangkaian drivernya lebih kompleks,
karena harus dapat menglirkan arus dalam dua arah melalui koil yang sama.
Sedangkan jenis unipolar, selain motor stepper tersebut lebih mudah diperoleh di
pasaran juga memerlukan rangkaian driver yang lebih sederhana. Pada dasarnya ada dua jenis motor stepp
Proses pengendalian motor stepper unipolar dilakukan dengan menghubungk
ub-kutub motor ke ground secara bega
an
kut ntian. Kutub motor yang berhubungan
ngan
me bergerak secara full stepping
aupun half stepping baik searah maupun berlawanan dengan jarum jam. Jika
Fasa Proses
dengan ground akan mengaktifkan koil yang bersangkutan. Maka de
ngaktifkan urutan yang tepat, motor stepper dapat
m
motor stepper bergerak 1.8 derajat atau step pada mode full stepping , maka pada mode half stepping motor dapat digerakkan sebesar 0.9 derajat atau step. Pengaturan kutub-kutub motor dan proses gerak motor stepper dapat dipahami
melalui contoh Tabel 2.1, Tabel 2.2 dan Tabel 2.3.
Tabel 2.1 Mode Full Step Motor Stepper (a) Kutub
A B C D
1 ON ON OFF OFF
3 OFF OFF ON ON
4 ON OFF OFF ON
e o ll Motor Stepper (b)
Fasa
Kutub
Proses
Tab l 2.2 M de Fu Step
A B C D
1 ON OFF OFF OFF
3 OFF OFF ON OFF
4 OFF OFF OFF ON
Tabel 2.3 Mode Half Step Motor Stepper
Fasa
Kutub
Proses A B C D
1 ON OFF OFF OFF
3 OFF ON OFF OFF
4 OFF ON ON OFF
5 OFF OFF ON OFF
6 OFF OFF ON ON
8 ON OFF OFF ON
2.5 Potensiometer
Resistor berasal dari kata resist yang berarti menahan ( dalam elektronika artinya menahan tegangan dan arus). Resistor merupakan komponen pasif dalam
elektronika yang berarti berfungsi sebagai hambatan atau penahan arus listrik,
resistor terbagi dari beberapa jenis diantaranya:
1. resistor yang nilainya konstan ( )
2. resistor variable (variable resistor) 3. resistor non linear (non linear resistor)
Gambar 2.11 Potensiometer
ah resistor yang nilai tahanannya dapat diubah-ubah sesuai fixed resistor
Variable resistor adal
karbon, present, present potensio meter yang lebih dikenal dengan nama trimmer potensio (trimpot), hal ini dapat diamati pada contoh Gambar 2.11.
NPN, pada proyek tugas akhir ini
transistor TIP 122 digunakan sebagai driver motor stepper, agar TIP 122 dapat
digunakan sebagai driver motor stepper, maka TIP 122 harus rangkai secara
darlington. Rangkaian darlington adalah rangkaian elektronika yang terdiri dari
sepasang transistor bipolar (dua kutub) yang tersambung secara seri. Sambungan
seri ini digunakan sebagai penguatan yang tinggi, karena hasil penguatan pada
transistor pertama akan diku stor kedua. Datasheet
dari transistor NPN TIP 122 terlihat seperti Gambar 2.12 di bawah ini.
ditunjukkan pada Gambar 2.13. 2.6 Transistor TIP 122
Transistor TIP 122 merupakan jenis transistor
atkan lebih lanjut oleh transi
Gambar 2.12 Transitor TIP 122
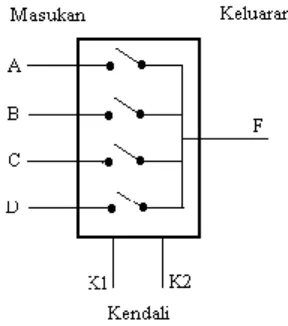
2.7 Multiplekser
Multiplekser adalah suatu rangkaian elektronik yang mampu menyalurkan sinyal
salah satu dari banyak masukan ke sebuah keluaran. Pemilihan masukan ini
Gambar 2.13 Bagan Multiplekse
Kendali pada Multipleks ng akan dihubungkan.
Saluran kendali sebanyak "n" saluran apat menyeleksi 2n saluran masukan.
ah Multiplekser 4 ke 1 dengan Kendali K1 dan K2. Ketika
Tabel 2.4 Tabel Kebenaran Multiplekser
Jika E mewakili saluran ebenaran tersebut
keluaran F dapat dinyatakan sebagai :
F = E.Xo.K1.K2 + E.X1.K1.K2 + E.X2.K1.K2 + E.X3.K1.K2………..(2.10)
r
er akan memilih saklar mana ya
d
Sebagai contoh: sebu
saluran Enable = 1, keluaran selalu bernilai nol. Tetapi ketika saluran Enable = 0,
keluaran F diatur melalui K1 dan K2. Tabel kebenaran Multiplekser ini
dinyatakan seperti terlihat pada Tabel 2.4.
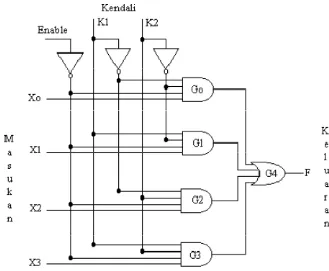
Berdasarkan persamaan 2.10 disusunlah rangkaian logika Multiplekser 4 ke1
seperti ditunjukkan oleh Gambar 2.14.
Komunikasi paralel adalah komunikasi yang mengirimkan data secara bersamaan.
Pada penggunaan komunikasi paralel semua bit dikirim secara bersamaan pada
waktu yang sama. Oleh karena itu pada komunikasi ini kita membutuhkan banyak
kabel. Hal memang sering menjadi kelemahan komunikasi paralel akibat
banyaknya kabel yang dibutuhkan, dan panjang kabel ini tidak boleh lebih dari
20m, untuk menjaga keaslian data. Namun kelebihan komunikasi paralel adalah
lebih cepat dan kapasitas yang dibawa juga banyak serta pemrograman yang lebih
mudah. Komunikasi paralel yang digunakan adalah komunikasi paralel lewat Gambar 2.14 Rangkaian Logika Multiplekser 4 ke 1
kabel data untuk printer (saat mengeluarkan data). Pada keadaan normal (tidak
aktif) tegangan pada pin-pin ini adalah 0 volt, namun bila kita beri high, maka
tegangannya akan berubah menjadi 5 volt. Pada perancangan alat, komunikasi
paralel hanya digunakan untuk mengeluarkan data, yang bisa berguna untuk
menyalakan relay atau motor stepper untuk menjalankan atau mengontrol
hardware. Pada port paralel ada tiga jalur data yaitu : 1. jalur kontrol memiliki arah bidirectional.
2. jalur kontrol memiliki satu arah yaitu : arah keluaran.
3. jalur data, memiliki 2 arah. Dapat juga berfungsi sebagai pengirim Address
dan data, masing-masing 8 bit, dimana keduanya melakukan transfer data
dengan protokol handshaking serta diakses dengan register yang berbeda.
Bila kita asanya dalam
bentuk hexadesimal , seperti 278, 378 atau 3BC, seperti terlihat pada Tabel
Tabel 2.5 Base Address
menggunakan jalur LPT1 maka base address bi
2.5.
Ragister kontrol Register status Register data Register address
37A 379 378 37B
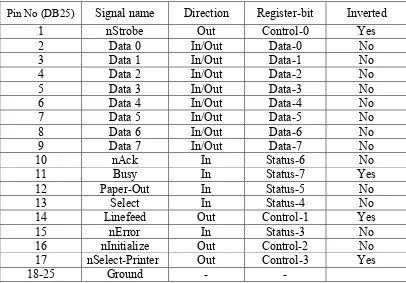
Data output yang dituliskan pada register dapat diukur tegangannya dengan
mengunakan multimeter, dan saat diberikan tregangan ke pin input pada paralel
port , dapat dibaca oleh register.sebagai contoh jika salah satu pin out dialamatkan
nilai “1” maka akan terbaca tegangan 5 Volt pada pin yang bersangkutan. Fungsi
Tabel 2.6 Fungsi Pin – Pin DB 25
Pin No (DB25) Signal name Direction Register-bit Inverted
1 nStrobe Out Control-0 Yes
2 Data 0 In/Out Data-0 No
3 Data 1 In/Out Data-1 No
4 Data 2 In/Out Data-2 No
5 Data 3 In/Out Data-3 No
6 Data 4 In/Out Data-4 No
7 Data 5 In/Out Data-5 No
8 Data 6 In/Out Data-6 No
9 Data 7 In/Out Data-7 No
10 nAck In Status-6 No
11 Busy In Status-7 Yes
12 Paper-Out In Status-5 No
13 Select In Status-4 No
14 Linefeed Out Control-1 Yes
15 nError In Status-3 No
16 nInitialize Out Control-2 No
17 nSelect-Printer Out Control-3 Yes
18-25 Ground - -
Port paralel dapat mentransm li detak. Tata-letak dari
ke-dua puluh lima pin (DB 25) parallel printer port, diperlihatkan dalam Gambar
2.15.
si Pin Parallel Port isi 8 bit data dalam seka
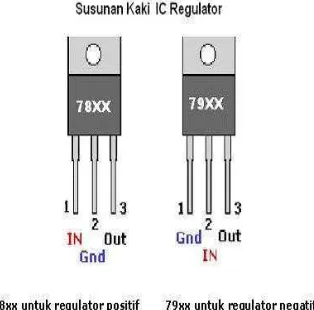
2.9 IC Regulator
IC reg tor adalah I digunaka menghasilkan tegangan yang stabil,
dari su ber teganga tidak sta rnya teg eluaran te tung
dari jenis voltase reg da beber am volt lator, yaitu 5V, 6V,
7V, 8V, 9V, 10V, 12V, 15V, dan 18V. Da
input adalah maks tergantun
untuk tipe L seperti 78L05 dan 7812 adalah 100 mA, sedangkan untuk tipe biasa
sepert 05 arus ra 500 sampai A, Gam 2.16
menunjukkan su C 7805
Gambar 2.16 Susunan Kaki IC 7805
ula C yang n untuk
m n yang bil. Besa angan k rgan
ulator. A apa mac ase regu
n voltase yang diperbolehkan untuk
imal 35V ( g pabrik). Sedangkan arus pada output
i 78 output anta mA dengan 1 bar
3.1 Gambaran Umum
Sebelum membahas tentang perancangan perangkat keras dan perangkat lunak
yang akan dirancang, maka dapat dilihat Gambaran umum dari sistem kontrol dan
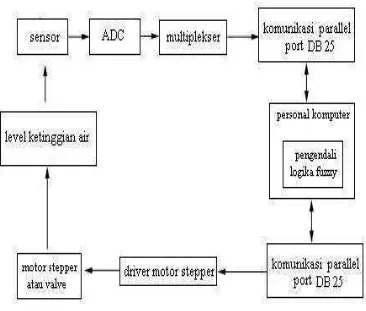
monitoring dari level ketinggian air, Gambar 3.1 merupakan blok diagram sistem
secara keseluruhan.
Dari Gambar 3.1, dapat dijelaskan urutan kerja sistem, yaitu :
1. Sistem kontrol
- Sensor potensiometer menangkap informasi level ketinggian air
berdasarkan perubahan tegangan dan kemudian mengirimkan data
analog ke analog to digital converter (ADC)
- Jika sudah terbaca ke ADC, kemudian data analog dari sensor
diubah menjadi data dalam bentuk digital atau biner yang jumlah
maksimal bitnya adalah 8 bit dan sebagai indikator bitnya
digunakan led sebanyak 8 buah, kemudian output dari ADC akan
diproses oleh rangkaian multiplekser.
- Pada rangkaian multiplekser data dari ADC diproses dan kemudian
dikeluarkan dalam satu saluran, data ini kemudian dikirim ke
komputer melalui komunikasi paralel yaitu menggunakan
connector DB 25 pada komputer.
- Data yang telah masuk ke komputer, kemudian diolah dan diproses
menggunakan software LabVIEW untuk mengimplementasikan kendali logika fuzzy, setelah itu data yang telah diproses kemudian dikeluarkan kembali pada connector DB 25, yang kemudian
digunakan untuk mengendalikan motor steper untuk
mengendalikan sistem buka dan tutup keran sehingga level
3.2 Perancangan Sistem
Pada bab ini dilakukan perancangan perangkat lunak dan perangkat keras yang
diperlukan untuk merealisasikan proyek tugas akhir yang akan direalisasikan,
yaitu pengendalian level ketinggian air dengan menggunakan kendali logika fuzzy. Dibawah ini adalah Gambaran umum tentang perancangan sistem yang akan
dilakukan.
1. Perancangan perangkat keras yang mendukung untuk pengendalian
level ketinggian air.
2. Perancangan perangkat lunak dengan menggunakan software
labView sebagai implementasi dari kendali logika fuzzy.
Gambar 3.2 menunjukkan diagram blok pengendalian sistem.
Gambar 3.2 Diagram Blok Pengendalian Sistem
Ket :
3.3 Perancangan perangkat keras ( hardware )
Dalam perancangan perangkat keras ini akan dibuat dan digunakan beberapa
perangkat keras yang mendukung untuk pengendalian level ketinggian air, yaitu
meliputi :
a. sensor level ketinggian yang menggunakan potensiometer
b. rangkaian ADC 0804 digunakan untuk mengubah data analog dari
sensor menjadi data digital
c. multiplekser digunakan untuk mengubah banyak data atau sinyal
menjadi satu data yang akan dikeluarkan pada satu output
d. rangkaian driver motor stepper
e. penggunaan connector DB 25 sebagai interface antara perangkat keras
dengan komputer
f. rangkaian catu daya sebagai supply tegangan
3.3.1 Potensiometer
Variabel resistor atau potensiometer adalah resistor yang nilai tahanannya bisa
diubah-ubah sesuai dengan nilai yang di kehendaki, pada tugas akhir ini besarnya
hambatan potensiometer yang digunakan yaitu maksimum 50 kΩ, sesuai dengan
persamaan (3.1).
V(output)= ………...………….(3.1) Ket :
R1 = perubahan hambatan.
3.3.2 Analog To Digital Converter (ADC)
IC ADC 0804 mempunyai dua masukan analog, Vin (+) dan Vin (-), sehingga
dapat menerima masukan diferensial. Masukan analog sebenarnya (Vin) sama
dengan selisih antara tegangan-tegangan yang dihubungkan dengan ke dua pin
masukan yaitu Vin= Vin (+) – Vin (-). Kalau masukan analog berupa tegangan
tunggal, tegangan ini harus dihubungkan dengan Vin (+), sedangkan Vin (-)
digroundkan. Untuk operasi normal, ADC 0804 menggunakan Vcc = +5 Volt
sebagai tegangan referensi. Dalam hal ini jangkauan masukan analog mulai dari 0
Volt sampai 5 Volt (skala penuh), karena IC ini adalah SAC 8-bit, resolusinya
akan sama dengan.
Resolusi = = = 19.6 mVolt………(3.2) (n menyatakan jumlah bit keluaran biner IC analog to digital converter)
IC ADC 0804 memiliki generator clock intenal yang harus diaktifkan dengan menghubungkan sebuah resistor eksternal (R) antara pin CLK OUT dan CLK IN
serta sebuah kapasitor eksternal (C) antara CLK IN dan ground digital. Frekuensi
clock yang diperoleh di pin CLK OUT sama dengan :
f = . ………...(3.3)
Untuk sinyal clock ini dapat juga digunakan sinyal eksternal yang dihubungkan ke
pin CLK IN. ADC 0804 memiliki 8 keluaran digital sehingga dapat langsung
dihubungkan dengan saluran data mikrokomputer. Masukan (chip select, aktif
0804 tidak
adalah sebaagai berikut :
n atau menoonaktifkan AADC
3. Write (WR)
Berfungsi sebagai pin eksekusi penulisan perintah ketika dilakukan
interupsi.
4. CLK
Berfungsi sebagai pembangkit sinyal osilator.
5. INTR
Pin ini dihubungkan ke mikrokontroler apabila dilakukan interupsi.
6. Vin (+)
Sebagai pin masuan analog yang diperoleh dari sensor.
7. Vin (-)
Sebagai ground dari Vin (+).
8. A GND
Berfungsi sebagai pin ground data analog.
9. Vref/2
Pin ini digunakan untuk proses adjustment, Out put dari ADC. Pin ini
berfungsi juga sebagai tegangan cadangan pada ADC. Pin ini dihubungkan
dengan ground apabila mode konversi yang digunakan adalah mode
konversi yang digunakan adalah mode konversi secara terus menerus (Free
Running).
10. D GND
Sebagai pin ground digital
11. CLK
12. D0 – D7
Sebagai pin out atau address data bus dari ADC .
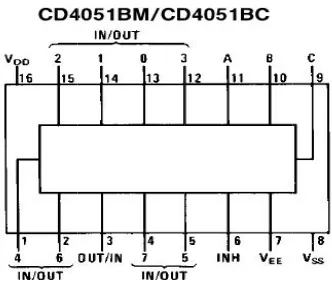
3.3.3 Multiplekser
Multiplekser adalah suatu sirkuit yang berfungsi menggabungkan beberapa atau
banyak sinyal elektrik menjadi satu sinyal tunggal. Biasanya input multiplekser
berupa data yang terdiri dari 8 bit. Input-input tersebut akan diseleksi urutan
keluarannya oleh suatu pengontrol skema dari IC multipleser CD4051
Ditunjukkan pada Gambar 3.6.
Input pada multiplekser merupakan output dari ADC yang kemudian diberikan
pada kaki 13, 14, 15, 12, 1, 5, 2 dan 4, hal ini ditunjukkan pada Gambar 3.4
rangkaian multiplekser. Output akan diperoleh dari kaki 3 dan sinyal yang
dikeluarkan pada output ditentukan oleh input A, B, C pada kaki 11, 10 dan 9.
Proses pengontrolan output tersebut sesuai Tabel 3.1 Pengontrol Output Multiplekser
Tabel 3.1 Pengontrol Output Multiplekser INPUT STATES
“ON” Channels
INHIBIT C B A
dengan je
3.3.5 Kommunikasi DData paralleel
Port paralllel atau portt printer terdiri dari tiga bagian yaaitu :
1. Da
n kode-kodde kontrol dari
3. Po
berfungsi uuntuk menngirimkan kkode-kode dari sistemm ke
Data line,
1. Padaa desktop, kklik kanan ppada mykommputer dan ppilih properrtis
2. Klikk pada tab ddevice manaager dan caari LPT1 3. Seteelah memilihh LPT1, kliik tombol prropertis
4. Lalu
akan terlihaat pada Inpuut
a windows ddevices mannager
ws Devices MManager
ketinggian air, oleh sebab itu dilakukanlah perancangan perangkat lunak yang
meliputi :
a. Perancangan kendali logika fuzzy
b. Perancangan program dalam perangkat lunak (software) LabVIEW
3.4.1 Perancangan Kendali Logika Fuzzy
Pada proyek tugas akhir ini, perancangan kendali logika fuzzy digunakan sebagai pengendali untuk mengendalikan level ketinggian air , Gambar 3.14 menunjukkan
diagram blok pengendali logika fuzzy , dalam implementasinya kendali logika
fuzzy memiliki empat komponen utama sebagai konfigurasi dasar sistem kendali logika fuzzy yaitu :
1. Perangkat fuzzifikasi
2. Basis kaidah (rule base)
3. Mekanisme inferensi (inference mechanism) 4. Perangkat defuzzifikasi
1. Perangkat Fuzzifikasi
Fuzzifikasi berfungsi untuk menstransformasikan variabel masukan berupa sinyal masukan (input) yang bersifat bukan fuzzy (variabel numerik) untuk dikonversi atau diubah menjadi variabel fuzzy (variabel linguistik) dengan menggunakan operator fuzzifikasi (fuzzifier), fuzzifikasi adalah pemetaan
input ke semesta himpunan fuzzy dan secara simbolis pemetaan ini dinyatakan pada persamaan 3.4 dibawah ini.
x = fuzzifier (xo)…...……….(3.4) Dimana xo adalah masukan crisp dari proses, x adalah himpunan fuzzy dan
fuzzifier adalah operator fuzzifikasi.
2. Basis Kaidah (rule base)
Basis Kaidah (rule base) pada kontrol fuzzy merupakan suatu bentuk aturan relasi atau implikasi seperti “Jika-Maka” atau “If-Then” seperti pernyataan dibawah ini :
“JIKA “X=A DAN “JIKA”Y=B “MAKA” Z=C
Dalam mendefinisikan himpunan fuzzy biasanya dilakukan secara subyektif dan didasarkan pada pengalaman dan pertimbangan yang menyangkut
kerekayasaan, hal ini dilakukan untuk mendefinisikan variabel-variabel
linguistik ke dalam bentuk himpunan fuzzy yang mampu menterjemahkan keadaan objek nyata kebentuk fuzzy.
Sebagai contoh memilih fungsi segitiga, himpuan fuzzy didefinisikan dalam semesta pembicaraan, yaitu dengan membagi semesta pembicaraan menjadi
variabel linguistik yaitu : positif besar (PB), positif menengah (PM), positif
kecil (PS), nol (Z), negatif besar (NB), negatif menengah (NM), negatif
kecil (NS). Seperti terlihat pada Gambar 3.15 dibawah ini.
Gambar 3.15 Pendefinisian Dengan Fungsi Segitiga
Untuk mendapatkan kaidah kendali yang baik, diperlukan ketepatan
penggabungan antara intuisi dan pengalaman terhadap karakteristik proses
yang diamati, misalnya tanggapan peralihan dari proses, dalam proyek tugas
akhir ini kaidah kendali fuzzy mengacu pada trayektori bidang fasa (e dan
∆e) dan diagram fungsi waktu respon sistem lingkar tertutup (close loop) masukan tangga seperti Gambar 3.15 dengan mengambil lintasan
trayektorinya, akan membuat keadaan proses secepat mungkin mengarah
pada titik singular, hal ini berarti keluaran proses secepat mungkin mencapai
keadaan tunak sama dengan acuan. Gambar 3.16 menunjukkan tanggapan
Gambar 3.16 Tanggapan (step respon) Sistem Loop Tertutup
Dengan mendesain suatu himpunan kaidah fuzzy yang dapat mengurangi lewatan maksimum (overshoot) dan waktu naik (rise time) maka masing-masing peubah masukan atau keluaran dibagi menjadi tujuh keanggotaan
fuzzy yaitu negatif besar (NB), negatif menengah (NM), negatif kecil (NS), nol (Z), positif kecil (PS), positif menengah (PM) dan positif besar (PB).
Nilai kualitatif ditentukan pada setiap titik yang bertanda huruf (A-I), seperti
ditunjukkan pada Tabel 3.3 di bawah ini.
Tabel 3.3 Kaidah Kendali Fuzzy
Kaidah e ∆e U Referensi Fungsi
1 PB Z PB Titik a Perpendek rise time
2 PM Z PM Titik e Perpendek rise time
3 PS Z PS Titik l Perpendek rise time
4 Z NB NB Titik b Kurangi overshoot
5 Z NM NM Titik f Kurangi overshoot
6 Z NS NS Titik j Kurangi overshoot
7 NB Z NB Titik c Kurangi overshoot
8 NM Z NM Titik g Kurangi overshoot
11 Z PM PM Titik h Perkecil osilasi 12 Z PS PS Titk i Perkecil osilasi 13 Z Z Z Titik set
Agar pengendali fuzzy yang dirancang berlaku untuk seluruh keadaan sistem, maka kaidah-kaidah kendali yang disusun pada Tabel 3.3 dilengkapi
dengan kaidah-kaidah kendali hingga jumlah kaidah kendali sama dengan
jumlah kombinasi dari variabel linguistik error (e) dan turunan error (∆e) yang tersedia, seperti pada Tabel 3.4 dibawah ini.
Tabel 3.4 Kaidah-Kaidah Kendali Fuzzy Dengan Tujuh MF
∆e
e NB NM NS Z PS PM PB
PB Z PS PM PB PB PB PB PM NS Z PS PM PB PB PB
PS NM NS Z PS PM PB PB
Z NB NM NS Z PS PM PB
NS NB NB NM NS Z PS PM NM NB NB NB NM NS Z PS
NB NB NB NB NB NM NS Z
3. Mekanisme Inferensi (inference mechanism)
Mekanisme inferensi atau pengambilan keputusan dalam sistem kendali logika fuzzy dilakukan dengan penalaran pendekatan (approximate reasoning), misalkan masukan pengendali logika fuzzy adalah fuzzy tunggal yakni A, B sehingga penalaran fuzzy dapat dilakukan dengan kaidah operasi minimum Mamadani.
Minimum : ………..(3.5) Dimana αi adalah fakror bobot yang menyatakan ukuran kesetaraan kaidah
inferensi fuzzy yang digunakan adalah mekanisme inferensi fuzzy mamdani, seperti terlihat pada Gambar 3.17 dibawah ini.
Gambar 3.17 Sistem Inferensi Fuzzy Mamdani
Hasil keluaran sistem inferensi mamdani masih berupa fuzzy. Untuk aksi kendali nyata yang akan diumpankan pada proses diperoleh melalui proses
defuzzifikasi. Gambar 3.17 menunjukkan sistem inferensi fuzzy mamdani dengan dua kaidah fuzzy menggunakan min dan max untuk operator T-norm dan T-conorm.
4. Defuzzifikasi
Defuzzifikasi merupakan pemetaan himpunan fuzzy ke himpunan tegas (crips), yang mana proses ini merupakan kebalikan dari proses fuzzifikasi
proses defuzzifikasi dijabarkan pada persamaan 3.6 di bawah ini.
Z0= defuzzier (Z)………(3.6)
Dalam proyek tugas akhir metode yang digunakan untuk proses
menentukan nilai output aksi kontrol Z0 kasus diskrit ditunjukkan pada
persamaan 3.7 di bawah ini.
z
0(coa)
=
∑ µ
∑ …………..………...(3.7)
3.4.2 Perancangan Program Dalam Perangkat Lunak (software) LabVIEW
Dalam proyek tugas akhir ini dalam mengendalikan level ketinggian air
diperlukan perancangan beberapa program sehingga menjadi satu-kesatuan
program pengontrol fuzzy, beberapa program yang perlu dirancang diantaranya.
1. Perancangan program Triangel MF.Vi 2. Perancangan program Trapezium.Vi 3. Perancangan program Input array.Vi 4. Perancangan program Pengaman.Vi
5. Perancangan program Tangki.Vi
6. Perancangan program multiplekser.Vi
7. Perancangan Program Motor Stepper.Vi
8. Perancangan program Fuzzy.Vi
9. Perancangan program Pengontrol fuzzy.Vi
1. Perancangan Program Triangel MF.Vi
Gambar 3.18 dan 3.19 menunjukkan front panel dan blok diagram dari Program Triangel.Vi.
Gambar 3.18 Front Panel Program Triangel.Vi
Gambar 3.19 Blok Diagram Program Triangel.Vi
2. Perancangan Program Trapezium.Vi
Gambar 3.20 Front Panel Program Trapezium.Vi
Gambar 3.21 Blok Diagram Program Trapezium.Vi
3. Perancangan Input Array.Vi
Perancangan program Input Array.Vi digunakan untuk membatasi besarnya
nilai dan interval inputan untuk pendefinisian semesta pembicaraan pada
Gambar 3.22 Front Panel Program Input Array.Vi
Gambar 3.23 Blok Diagram Program Input Array.Vi
4. Perancangan Program Pengaman.Vi
Perancangan progam pengaman.Vi digunakan sebagai sakelar, prinsip
tersebut memanfaatkan status 4 dan status 5 pada pin port parallel DB 25,
yaitu pin 13 dan pin 12, jika status 4 aktif maka putaran keran akan mati hal
ini menandakan bahwa keran telah membuka penuh sedangkan jika status 5
penuh, Gambar 3.24 dan 3.25 menunjukkan front panel dan blok diagram
program pengaman.Vi
Gambar 3.24 Front Panel Program Pengaman.Vi
Gambar 3.25 Blok Diagram Program Pengaman.Vi
5. Perancangan program Tangki.Vi
Perancangan program tangki.Vi digunakan untuk mengamati perubahan
level ketinggian air minimum 0 cm dan maksimum 15 cm, pertama kali
dilakukan pengujian perubahan data digital dari output ADC terhadap
perubahan level ketinggian air pada tangki proses, selanjutnya data-data
tersebut diolah pada program tangki.Vi untuk menampilakn level ketinggian
Gambar 3.26 Front Panel Program Tangki.Vi
Gambar 3.27 Blok Diagram Program Tangki.Vi
6. Perancangan Program Multiplekser.Vi
Perancangan program Multiplekser.Vi digunakan untuk mengetahui nilai
keluaran dari rangkaian multiplekser, apakah sesuai dengan nilai dari
keluaran rangkaian ADC (analog to digital converter).
front panel program Multiplekser.VI ditunjukkan pada Gambar 3.28 di
Gambar 3.29 menunjukkan blok diagram multiplekser.Vi
Gambar 3.29 Blok Diagram Program Multiplekser.Vi
7. Perancangan Program Motor Stepper.Vi
Perancangan program motor stepper.Vi digunakan untuk mengendalikan
putaran motor stepper supaya dapat memutar ke kanan, ke kiri dan berhenti.
Gambar 3.30 menunjukkan front panel program motor stepper.Vi
Gambar 3.31 menunjukkan blok diagram motor stepper.Vi
Gambar 3.31 Blok Diagram Program Motor Stepper.Vi
8. Perancangan Program Fuzzy.Vi
Gambar 3.32 Front Panel Program Fuzzy.Vi
Gambar dari blok diagram program fuzzy.Vi dapat dilihat pada lampiran.
9. Perancangan Program Pengontrol Fuzzy.Vi
Perancangan program pengontrol fuzzy.Vi dilakukan untuk mengendalikan level ketinggian air dari plant sehingga level ketinggian air tersebut sesuai
dengan level ketinggian yang diharapkan (setpoint), perancangan program dilakukan dengan menggabungkan beberapa sub Vi, yaitu triangel.Vi,
trapezium.Vi, input array.Vi, motor stepper.Vi, tangki.Vi, multiplekser.Vi
Gambar 3.33 menunjukkan front panel program pengontrol fuzzy.Vi
Gambar 3.33 Front Panel Program Pengontrol Fuzzy.Vi
4.1 Pendahuluan
Untuk menghindari kesalahan-kesalahan yang terjadi pada rangkaian elektronika
dan pemograman software, maka diperlukan suatu pengujian program dan
pengukuran pada rangkaian yang telah dirancang, jika rangkaian dan software
berjalan baik, maka rangkaian dan program dianggap berjalan sesuai harapan.
4.2 Tujuan Pengujian dan Pengukuran
Tujuan dari pengujian dan pengukuran adalah untuk mendapatkan data-data dari
rangkaian dan program yang telah dirancang, sehingga kita dapat mengetahui
spesifikasi dari rangkaian dan program tersebut, pengujian dilakukan secara
bertahap sesuai dengan urutan rangkaian dan program yang akan dirancang,
setelah masing-masing rangkaian dan program dapat menghasilkan output sesuai
yang diinginkan, maka dapat dilanjutkan dengan menggabungkan
rangkaian-rangkaian tersebut sehingga dapat berjalan sesuai dengan yang diinginkan.
4.3 Pengujian Rangkaian Sensor Potensiometer
Pengujian ini bertujuan untuk mengetahui kelinieran dari sensor potensiometer,
yaitu berupa level tegangan yang berbanding lurus terhadap besar perubahan
hambatan, besar tegangan maksimum yang diberikan pada sensor potensiometer
yaitu 5 VDC, kemudian dengan mengatur hambatan pada sensor poteniometer
VDC, besar perubahan tegangan inilah nantinya yang akan digunakan sebagai
inputan bagi rangkaian ADC (analog to digital converter) untuk mendefinisikan
perubahan level ketinggian air. Data hasil pengujian kelinieran dari sensor
potensiometer di tunjukkan pada Tabel 4.1 data pengujian rangkaian sensor
potensiometer.
Tabel 4.1 Data Pengujian Rangkaian Sensor Potensoimeter
V Input
Dari Tabel 4.1 di atas dapat diamati bahwa setiap perubahan tegangan output
dipengaruhi oleh perubahan hambatan, dengan besar tegangna output sesuai
persamaan (3.1) di bawah ini.
V(output)= ……….(3.1) Ket :
Dari data hasil pengujian terlihat bahwa sensor potensiometer dapat bekerja sesuai
yang diharapkan yaitu dapat berubah secara linier, Gambar 4.1 menunjukkan
grafik kelinieran dari sistem
0
Gambar 4.1 Grafik Kelinieran Sensor Potensiometer
4.4 Pengujian Rangkaian Analog To Digital Converter (ADC)
Pengujian pada rangkaian analog to digital converter (ADC) dilakukan untuk
mengamati konversi masukan analog yaitu berupa tegangan menjadi data digital,
pada pengujian ini diperoleh ketepatan pembacaan ADC 0804, ketepatan
pembacaan tersebut dipengaruhi oleh keluaran dari sensor potensiometer,
berdasarkan pengambilan data dari ADC 0804 diperoleh faktor konversi, faktor
konversi ini menentukan hasil pembacaan dari tiap-tiap objek yang diuji, yaitu
konversi tegangan analog dari sensor potensiometer dan data digital yang
diperoleh, data digital ini digunakan sebagai masukan pada rangkaian
multiplekser. Data hasil pengujian ADC 0804 ditunjukkan pada Tabel 4.2 data
Tabel 4.2 Data Hasil Pengujian ADC 0804
TEGANGAN DC OUTPUT BINNER
0.02 0000 0001
Dari data hasil pengujian rangkaian ADC 0804 terlihat bahwa selisih tegangan
input per bit adalah 0.02 volt, hal ini sesuai dengan dasar teori dimana jika
keluaran dari sensor potensiometer dihubungkan dengan rangkaian ADC
0804, dengan tegangan referensi sebesar 5 VDC dan lebar data 8-bit, maka
setiap kenaikan 1-bit data resolusinya adalah :
Resolusi = tegangan referensi/banyak data………..…………(4.1)
= 5/255
4.5 Pengujian Rangkaian Multiplekser
Pengujian rangkaian multipleser pertama kali dilakukan dengan merancang
program multiplekser.Vi seperti terlihat pada Gambar 4.2
Gambar 4.2 Multipleser.Vi
Program multiplekser.Vi digunakan untuk mengamati keluaran dari multiplekser
apakah sesuai dengan dasar teori, yaitu multiplekser merupakan rangkaian
elektronik yang mampu menyalurkan sinyal salah satu dari banyak masukan ke
sebuah keluaran.
Pengujian rangkaian multiplekser dilakukan dengan menghubungkan pin-pin
masukan dari IC multiplekser CD 4051 dengan pin-pin keluaran dari ADC 0804
kemudian pin-pin control pada IC multiplekser CD 4051 dihubungkan dengan
port parallel DB 25 yaitu pin 1, pin 14 dan pin 16 sedangkan pin keluaran dari IC
multiplekser CD 4051 dihubungkan dengan pada pin 15 pada port parallel DB 25.
Data hasil pengujian rangkaian multiplekser ditunjukkan pada Tabel 4.3
Tabel 4.3 Data Hasil Pengujian Rangkaian Multiplekser
Data Masukan Multiplekser Data Keluaran Multiplekser
0000 0000 0
0000 0001 1
0000 0010 2
0000 0011 3
0000 0100 4
0000 0111 7
0001 0000 16
0010 0000 32
0100 0000 64
1000 0000 128
1111 1111 255
Dari data hasil pengujian rangkaian multiplekser dapat diamati bahwa data-data
yang berasal dari ADC 0804 dengan lebar data 8-bit, dapat dikonversikan oleh
rangkaian multiplekser sehingga data-data tersebut menjadi data dengan satu
keluaran, hal ini sesuai dasar terori dari multiplekser, yaitu rangkaian multiplekser
merupakan rangkaian elektronik yang mampu menyalurkan sinyal salah satu dari
banyak masukan ke sebuah keluaran.
4.6 Pengujian Motor Stepper
Pengujian motor stepper dilakukan dengan cara memberikan tegangan 12 VDC
pada kaki common motor stepper, kemudian lilitan-lilitan pada motor stepper
dihubungkan dengan ground satu persatu sehingga menghasilkan perputaran yang
searah jarum jam. Dengan pengujian tersebut dapat dianalisa bahwa motor stepper
dapat bekerja dengan baik dan lancar apabila dapat melakukan hal-hal tersebut,
tetapi jika tidak bisa atau terdapat satu kesalahan saja dalam pengujian, maka
motor stepper tersebut tidak dapat digunakan.
4.7 Pengujian Driver Motor Stepper
Langkah pertama yang dilakukan untuk pengujian driver motor stepper adalah
dengan merancang program motor stepper.Vi, kemudian input-input driver motor
stepper dihubungkan pada pin 2, pin 3, pin 4 dan pin 5 yang mana pin-pin ini
motor harus dihubungkan secara berurutan pada pin-pin data tersebut, jika tidak
maka driver motor tidak dapat bekerja dengan baik, selanjutnya output dari driver
motor tersebut dihubungkan sesuai dengan urutan lilitan-lilitan motor stepper, hal
ini juga tidak boleh terbalik, jika terbalik maka motor stepper tidak dapat bekerja
dengan baik, front panel dan blok diagram program pengujian driver motor
stepper ditunjukkan pada Gambar 4.3 dan 4.4 di bawah ini.
Gambar 4.3 Front Panel Program Pengujian Motor Stepper.Vi
Gambar 4.4 Blok Diagram Program Pengujian Motor Stepper.Vi
Sesuai dengan perancangan program motor stepper.Vi diatas dapat diamati bahwa
driver motor dapat bekerja dengan baik, yaitu motor stepper dapat memutar ke
4.8 Pengujian Rangkaian Catu Daya
Pengujian ini bertujuan untuk mengetahui keluaran tegangan dari rangkaian catu
daya, apakah sesuai dengan dasar teori yaitu untuk IC 7805 tegangan keluaran
yaitu sebesar 5 Volt dan IC 7812 tegangan keluaran sebesar 12 volt, Tabel 4.4
menunjukkan data hasil pengujian keluaran tegangan dari rangkaian catu daya.
Tabel 4.4 Data Hasil Pengukuran Rangkaian Catu Daya
IC Regulator Tegangan Hasil
Pengukuran
Tegangan Yang Diharuskan
7805 4.8 VDC 5 VDC
7812 11 VDC 12 VDC
Dari hasil pengukuran didapatkan bahwa tegangan keluaran dari rangkaian catu
daya tidak sesuai dengan dasar teori, hal ini dikarenakan beberapa faktor,
diantaranya kualitas dari tiap-tiap komponen yang digunakan nilainya tidak
murni, selain itu tegangan jala-jala listrik tidak stabil. Persentase error dari
keluaran tegangan rangkaian catu daya adalah sebagai berikut :
1. Untuk IC 7805
%error = * 100%...(4.2)
= . * 100%
= 4 %
2. Untuk IC 7812
%error = * 100%...(4.3)
= * 100%
4.9 Pengujian Perangkat Lunak (Software)
Dalam pengujian software pada proyek tugas akhir ini terdiri dari beberapa
program untuk mengendalikan level ketinggian air, diantaranya.
1. Pengujian program triangel.Vi
2. Pengujian program trapezium.Vi
3. Pengujian program input array.Vi
4. Pengujian program tangki.Vi
5. Pengujian program motor stepper.Vi
6. Pengujian program fuzzy.Vi
7. Pengujian program pengontrol fuzzy.Vi
4.9.1 Pengujian Program Triangel.Vi
Pengujian program dilakukan dengan memberikan nilai-nilai pada tiga parameter
fungsi keanggotaan segitiga (triangel) yaitu a, b dan c kemudian memberikan nilai
pada koordinat (X), jika nilai output sesuai dengan persamaan pada fungsi
keanggotaan segitiga (triangel), maka program triangel.Vi dapat berjalan dengan
baik. Gambar 4.5 menunjukkan program triangel.Vi.