1 1.1 Latar Belakang
Seiring perkembangan zaman, teknologi digunakan untuk membantu pekerjaan manusia. Salah satu eknologi yang sedang berkembang saat ini adalah teknologi robot. Robot digunakan untuk membantu setiap pekerjaan manusia. Robot memilki banyak sekali jenis yaitu untuk robot manipulator, robot mobile,humanoid, robot underwater, flying robot / drone dan robot berkaki. Flying robot merupakan robot yang berada dilangit / diudara, robot ini digunakan untuk mengambil gambar dari udara atau menjelajah daratan dari udara yang sulit dilakukan oleh manusia dengan berjalan kaki. Flying robot juga disebut juga drone karena robot tersebut mempunyai kecerdasan buatan didalam nya untuk melakukan manuver,take off dan landing. Banyak sekali contoh dari drone ini salah satu nya adalah Quadcopter. Quadcopter memiliki bentuk menyerupai helicopter, dan memiliki 4 baling-baling sebagai penggerak nya.
1.2 Identifikasi Masalah
Dari latar belakang diatas dapat diidentifikasi permasalahan yang muncul yaitu :
1. Merakit sebuah multirotor dengan jenis quadcopter 2. Tuning PID auto level quadcopter
3. Cara mengatur Fuzzy logic untuk kestabilan ketinggian quadcopter
1.3 Rumusan Masalah
Dari identifikasi masalah diatas maka dapat dirumuskan sebagai berikut: 1. Bagaimana merakit sebuah quadcopter
2. Bagaimana parameter kendali PID mengendalikan level quadcopter 3. Bagaimana Fuzzy logic bekerja dalam kendali quadcopter
1.4 Tujuan
Tugas Akhir ini bertujuan untuk :
1. Dapat merakit sebuah quadcopter
2. Memahami pengaruh parameter PID terhadap kestabilan permukaan (level)
3. Kendali fuzzy dapat mengatur kestabilan ketinggian quadcopter
1.5 Batasan Masalah
3. Pengujian Kestabilan permukaan hanya dengan menyetuh / menekan frame quadcopter
4. Pengujian ketinggian maksimal 2m 1.6 Metoda Penelitian
Dalam penulisan laporan Tugas Akhir ini menggunakan beberapa macam metoda penelitian, yaitu :
1. Tinjauan Pustaka
Melakukan tinjauan pustaka terhadap beberapa referensi yang terkait dengan multirotor dan perangkat lain yang digunakan
2. Survey Lapangan
Melakukan pengamatan langsung dilapangan dan mengamati bagaimana bentuk perangkat yang digunakan, karakteristik perangkat dan penggunaan perangkat serta kendala yang sering terjadi.
3. Pengumpulan Data
Mengamati quadcopter dan mencatat perkembangan nya 4. Perancangan Kerangka Laporan
Membuat gambaran umum tentang laporan yang akan dibuat dengan membaginya menjadi point-point yang mempermudah pada saat pembuatan laporan itu sendiri 5. Pembuatan Laporan
1.7 Sistematika Penulisan Laporan
Dalam penyusunan laproan kerja praktek ini terbagi menjadi beberapa bagian. BAB 1 Pendahuluan
Pada bab ini membahas mengenai latar belakang, tujuan, batasan masalah, metoda penelitian dan sistematika penulisan laporan. BAB 2 Dasar Teori
Pada bab ini membahas mengenai gambaran dasar-dasar teori yang menunjang dalam pemahaman analisa masalah utama pada bab IV.
BAB 3 Pemilihan Komponen dan Perancangan Alat
Pada bab ini membahas mengenai perancangan alat yang digunakan untuk membuat sebuah quadcopter, tuning PID dan kendali fuzzy untuk kestabilan ketinggian.
BAB 4 Pengujian dan Analisis
Pada bab ini membahas pengujian sensor yang digunakan, pengujian sistem kendali PID untuk kestabilan permukaan dan kendali fuzzy untuk ke stabilan ketinggian.
BAB 5 Penutup
5
Dasar teori ini memuat tentang teori, hasil pemikiran dan penelitian terkait dengan quadcopter. Pembahasan pada bab ini meliputi : sekilas tentang aeromodeling, sekilas tentang quadcopter, perangkat yang digunakan, dan sistem kendali fuzzy
2.1 Sekilas Tentang Aeromodeling
Pada dunia aeromodeling, pesawat tanpa awak (Unmanned Aerial Vehicle / UAV ) merupakan miniatur pesawat udara yang bisa di terbangkan secara manual maupun secara otomatis menggunakan Remote Control (RC). Pesawat udara aerodinamis merupakan pesawat udara yang lebih berat dari udara. Pesawat udara aerodinamis terdiri dari 2 kelompok yaitu pesawat yang bermotor dan pesawat yang tidak bermotorPesawat udara bermotor terdiri dari bersayap tetap (Fixed wing) dan sayap putar (rotary wing). Pesawat udara udara aerodinamis bermotor bersayap tetap terdiri dari pesawat terbang dan amphibians. Pesawat udara bermotor bersayap putar terdiri dari helicopter dan gyrocopter. Pesawat udara aerodinamis tidak bermotor terdiri dari pesawat luncur (glider), pesawat layang dan layang-layang
2.2 Sekilas Tentang Quadcopter
Quadcopter adalah jenis pesawat udara aerodinamis dan bersayap putar dan salah satu jenis dari multirotor. Sebagaimana dengan namanya Quad yang berarti empat, sehingga pada multirotor ini memiliki empat buah motor brushless dan 4 buah baling baling.
Berdasarkan bentuk rangka (frame), quadcopter terdiri dari 2 model yaitu quadcopter dengan model plus (+) dan bentuk silang (x)
Gambar 2.2 model quadcopter plus dan bentuk silang 2.3 Prinsip Kerja Quadcopter
Pada ujung setiap frame terpasang 4 buah motor brushless dan propeller, motor brushless yang akan memutar propeller, dengan mengatur kecepatan dan mengatur arah putaran kedalam, sehingga menghilangkan gaya sentrifugal disekitar quadcopter mengakibatkan terangkat dan ber-manuver.
Gambar 2.3 Throttle Propeller
Putaran yang tebal menandakan propeller berputar dengan cepat yang mengakibatkan quadcopter akan terangkat (take-off), sedangkan putaran yang tipis menandakan propeller berputar dengan lambat yang mengakibatkan quadcopter akan turun/mendarat (landing).
Pengaturan pitch propeller adalah pengaturan yang diberikan agar quadcopter bergerak maju dan bergerak mundur. Berikut gambar yang menampilkan ilustrasi kecepatan putar propeller untuk pengaturan pitch.
Gambar 2.4 Pitch propeller
Pengaturan yaw control bertujuan agar quadcopter bergerak berputar kekiri dan bergerak ke kanan. Ilustrasinya dapat dilihat pada gambar berikut ini.
Pengaturan roll propeller diberikan agar quadcopter bergerak kekiri dan kekanan. Ilustrasi pengaturan roll propeller dapat dilihat pada gambar 4 di bawah ini.
Gambar 2.6 Roll propeller 2.4 Komponen Quadcopter yang digunakan
Komponen yang di gunakan ada 2 bagian yaitu bagian mekanik dan bagian elektronika. Bagian mekanik terdiri dari frame dan propeller, sedangkan bagian elektronika terdiri dari Flight controller, Electronic Speed Controller (ESC),catu daya dan motor brushless
2.4.1 Flight Controller
Flight Controller adalah sebuah mikroprosesor yang berfungsi sebagai pengatur kecepatan dan penerima sinyal dari Remote Control. Flight Controller menerima sinyal masukan dari telementry atau Remote Control yang berupa nilai kecepatan motor sesuai dengan stick ,lalu Flight Controller akan mengirimkan sinyal pulsa dari pin output yang akan di terima oleh ESC.
2.4.2 Electronic Speed Controller (ESC)
ESC adalah rangkaian elektronik yang berfungsi sebagai pengatur kecepatan putaran motor pada pesawat atau helikopter dengan cara menterjemahkan sinyal yang diterima receiver dari transmitter.
Gambar 2.8 Electronic Speed Controller
2.4.3 Catu daya
Catu daya adalah sebuah piranti elektronika yang berguna sebagai sumber daya untuk piranti lain, terutama daya listrik. Pada dasarnya pencatu daya bukanlah sebuah alat yang menghasilkan energi listrik saja. Catu daya yang digunakan berjenis Lithium Polymer (LiPo) yang kapasitansi sebesar 5000 mAh dan memiliki 3s
Gambar 2.9 Catu daya LiPo
2.4.4 Motor Brushless
stator dan medan magnet yang dihasilkan oleh rotor berputar di frekuensi yang sama. BLDC motor tidak mengalami Slip, tidak seperti yang terjadi pada motor induksi biasa. Motor jenis ini mempunyai permanen magnet pada bagian "rotor" sedangkan elektro-magnet pada bagian "stator"-nya. Setelah itu, dengan menggunakan sebuah rangkaian sederhana (simpel computer system), maka kita dapat merubah arus di eletro-magnet ketika bagian "rotor"-nya berputar. Motor brushless yang digunakan memiliki daya sebesar 980 kV
Gambar 2.10 Motor Brushless
2.4.5 Sensor Accelerometer
Sebuah tranduser yang berfungsi untuk mengukur percepatan, mendeteksi dan mengukur getaran, ataupun untuk mengukur percepatan akibat gravitasi bumi. Accelerometer juga dapat digunakan untuk mengukur getaran yang terjadi pada kendaraan Kendaraan, bangunan, mesin, dan juga bisa digunakan untuk mengukur getaran yang terjadi di dalam bumi, jarak yang dinamis, dan kecepatan dengan ataupun tanpa pengaruh gravitasi bumi.
2.4.6 Sensor Gyroscope
Device yang berguna untuk menentukan orientasi gerak yang berotasi dengan cepat pada poros sumbu. Gyroscope memiliki output yang peka terhadap kecepatan sudut dari arah sumbu x yang nantinya akan menjadi sudut phi (roll), dari sumbu y nantinya menjadi sudut theta (pitch), dan sumbu z nantinya menjadi sudut psi (yaw).
Penggunaan gyroscope dalam kehidupan sehari-hari belum banyak. Gyroscope lazimnya digunakan pada pesawat terbang, kapal, helicopter, dll. Hal tersebut untuk mengurangi getaran yang ditimbulkan mesin agar keseimbangan tidak goyah. Gyroscope baru-baru ini juga diterapkan pada mainan helicopter dengan tujuan menyeimbangkan saat diterbangkan.
2.5 Logika Fuzzy
Teori himpunan logika fuzzy dikembangkan oleh Prof. Lofti Zadeh padatahun 1965. Ia berpendapat bahwa logika benar dan salah dari logika Boolean tidak dapat mengatasi masalah gradasi yang berada pada dunia nyata. Untuk mengatasi masalah gradasi yang tidak terhingga tersebut, Zadeh mengembangkan sebuah himpunan fuzzy.
2.5.1 Himpunan Fuzzy
Pada himpunan tegas (crisp), nilai keanggotaaan suatu item x dalam suatu himpunan A, yang sering ditulis dengan μA [x], memiliki dua kemungkinan, yaitu:
satu (1), yang berarti bahwa suatu item menjadi anggota dalam suatu himpunan, atau
nol (0), yang berarti bahwa suatu item tidak menjadi anggota dalam suatu himpunan.
Pada penggunaan himpunan crisp, adanya perubahan kecil saja pada suatu nilai mengakibatkan perbedaan kategori yang cukup signifikan. Himpunan fuzzy digunakan untuk mengantisispasi hal tersebut. Seberapa besar ekstensinya dalam himpunan tersebut dapat dilihat pada nilai keanggotaannya. Kalau pada himpunan crisp, nilai keanggotaan hanya ada dua kemungkinan, yaitu 0 atau 1, pada himpunan fuzzy nilai keanggotaan terletak pada rentang 0 sampai 1. apabila nilai keanggotaan fuzzy μ A[x] = 0 berarti x tidak menjadi anggota himpunan A,
demikian pula apabila x memiliki nilai keanggotaan μA[x] = 1 berarti x menjadi anggota penuh himpunan A. Himpunan fuzzy memiliki dua atribut, yaitu :
1. linguistik, yaitu penamaan suatu grup yang mewakili suatu keadaan atau kondisi tertentu dengan menggunakan bahasa alami, seperti : MUDA, PAROBAYA, TUA.
Ada beberapa hal yang perlu diketahui dalam memahami sistem fuzzy, yaitu. 1. Variabel fuzzy
Variabel fuzzy merupakan variabel yang hendak dibahas dalam suatu sistem fuzzy. Contoh: umur, temperatur, permintaan.
2. Himpunan fuzzy
Himpunan fuzzy merupakan suatu grup yang mewakili suatu kondisi atau keadaan tertentu dalam suatu variabel fuzzy. Contoh: Variabel umur, terbagi menjadi 3 himpunan fuzzy, yaitu: muda, parobaya, tua.
3. Semesta pembicaraan
Semesta pembicaraan adalah keseluruhan nilai yang diperbolehkan untuk dioperasikan dalam suatu variabel fuzzy. Contoh: Semesta pembicaraan untuk variabel umur: [0 + ~].
4. Domain
Domain himpunan fuzzy adalah keseluruhan nilai yang diijinkan dalam semesta pembicaraan dan boleh dioperasikan dalam suatu himpunan fuzzy. Contoh: MUDA = [0, 45] ,TUA = [45, + ~].
2.5.2 Fungsi Keanggotaan
1. Representasi Linier
Pada pemetaan linear, pemetaan input ke derajat keanggotaannya digambarkan sebagai suatu garis lurus. Ada dua keadaaan himpunan fuzzy yang linear. Pertama, kenaikan himpunan dimulai pada nilai domain yang memiliki derajat keanggotaan nol [0] bergerak ke kanan menuju ke nilai domain yang memiliki derajat keanggotaan lebih tinggi. Gambar 2.11 dibawah ini menunjukan grafik dari kurva linier naik.
Gambar 2.11 Kurva Linear Naik
Fungsi keanggotaan :
[ ] {
Gambar 2.12 Kurva Linear Turun
Fungsi keanggotaan :
[ ] {
2. Representasi Kurva Segitiga
Kurva segitiga pada dasarnya merupakan gabungan antara dua garis linear.Gambar 2.3 dibawah ini menunjukan grafik dari kurva segitiga.
Gambar 2.13 Kurva Segitiga Fungsi Keanggotaan :
(pers.4)
Untuk menentukan nilai minimum dan maximum fungsi keanggotaan pada representasi kurva segitiga, dapat menggunakan persamaan 4. Parameter {a,b,c} dengan (a < b < c) menentukan sudut x dari tiga sudut penting dari fungsi keanggotaan.
3. Representasi kurva trapezoid
Kurva trapesium pada dasarnya seperti bentuk segitiga, hanya saja ada beberapa titik yang memiliki nilai keanggotaan satu. Gambar 2.14 dibawah ini menunjukan grafik dari kurva trapesium.
Gambar 2.14 kurva trapezoid Fungsi keanggotaan :
(pers.5)
Untuk menentukan nilai minimum dan maximum fungsi keanggotaan pada representasi kurva trapesium, dapat menggunakan persamaan 5. Parameter {a,b,c,d} dengan (a < b < c < d) menentukan sudut x dari empat sudut penting dari fungsi keanggotaan.
2.5.3 Operator Fuzzy
Ada beberapa operasi yang didefinisikan secara khusus untuk mengkombinasi dan memodifikasi himpunan fuzzy. Nilai keanggotaan sebagai hasil dari 2 operasi disebut α-predikat. Ada tiga operator dasar yaitu.
1. Operator AND
Operator ini berhubungan dengan operasi interseksi pada himpunan. A predikat sebagai hasil operasi dengan operator AND diperoleh dengan mengambil nilai keanggotaan terkecil antara elemen pada himpunan-himpunan yang bersangkutan.
µAnB = Min (µA [x],µB [y]………(pers. 7) 2. Operator OR
Operator ini berhubungan dengan operasi union pada himpunan. α - predikat sebagai hasil operasi dengan operator OR diperoleh dengan mengambil nilai keanggotaan terbesar antara elemen pada himpunan-himpunan yang bersangkutan.
µAuB = Max (µA [x],µB [y]) …………..…………(pers. 8) 3. Operator NOT
Operator ini berhubungan dengan operasi komplemen himpunan. α –
predikat sebagai hasil operasi dengan operator NOT diperoleh dengan mengurangkan nilai keanggotaan elemen pada himpunan dengan 1.
2.5.4 Fuzzy Inference System
Salah satu metode untuk penalaran (Fuzzy Inference System) adalah Metode
Mamdani (Max-Min). Metode ini diperkenalkan oleh Ebrahim Mamdani pada tahun
1975. Untuk mendapatkan output, diperlukan empat tahap. Dapat digambarkan
dengan block dibawah ini.
1. Pembentukan himpunan Fuzzy
Pada Metode Mamdani, baik variabel input maupun variabel output dibagi menjadi satu atau lebih himpunan fuzzy.
2. Fuzzyfikasi (Fuzzification)
Proses memetakan nilai tegas input (crisp) kedalam himpunan Fuzzy. Hasil dari proses ini berupa fuzzy input.
3. Rule evaluasi (Rule evaluation)
Proses melakukan penalaran terhadap fuzzy input yang dihasilkan oleh proses fuzzification berdasarkan aturan fuzzy yang telah dibuat. Proses ini menghasilkan fuzzy output. Fungsi Implikasi yang digunakan adalah Min.
4. Penegasan (Defuzzification)
∫
∫
Gambar 2.15 Fuzzy Inference System (Mamdani)
Salah satu alternatif metode untuk penalaran (Fuzzy Inference System) adalah dengan menggunakan metode penalaran fuzzy metode Sugeno hampir sama dengan penalaran Mamdani, hanya saja output sistem tidak berupa himpunan fuzzy, melainkan berupa konstanta atau persamaan linier. Metode ini diperkenalkan oleh Takagi-Sugeno Kang pada tahun 1985.
Pada metode Sugeno, fuzzifikasi, operasi fuzzy, dan implikasi sama seperti metode Mamdani, perbedaannya hanya pada agregasi dan defuzzifikasi. Jika pada metode Mamdani agregasi berupa daerah di bawah kurva, maka pada metode Sugeno agregasi berupa singleton. Defuzifikasi pada metode sugeno lebih sederhana, karena hanya menghitung titik rata-rata.
Gambar 2.16 Fuzzy Inference System (Sugeno)
2.6 Kendali PID
Menurut sebuah survey, bahwa 97% industri yang bergerak dibidang proses menggunakan kendali PID dalam melakukan pengontrolannya. Luasnya penggunaan kendali PID pada dasarnya dilatar belakangi beberapa hal diantaranya:
Kesederhanaan struktur kendali. Hanya mempunyai 3 parameter utama yang perlu diatur
Kendali PID memiliki sejarah panjang. PID telah digunakan jauh sebelum era digital berkembang (1930an)
Kendali PID dalam banyak kasus telah terbukti menghasilkan unjuk kerja yang relative memuaskan baik digunakan sebagai sistem regulator maupun sebagai sistem servo.
Seiring dengan berkembangnya dunia digital (terutama mikroprosesor dan mikrokendaliler) maka algoritma kendali PID dapat direalisasikan kedalam bentuk persamaan PID digital. Yang jika diimplementasikan hanya berupa sebuah program saja yang ditanamkan kedalam embedded system (mikroprosessor atau mikrokontroller).
Berikut beberapa penjelasan singkat tentang PID :
PID adalah singkatan dari (proposional integral derivative) yang merupakan rumus / perhitungan yang memiliki fungsi menghitung nilai error antara variable proses dengan set point yang di inginkan dan mampu memperkecil nilai error tersebut sehingga output yang dihasilkan semakin mendekati nilai yang di inginkan. Perhitungan PID sendiri memiliki rumus.
∫ ...(12) Dengan :
u(t) = sinyal output pengendali PID Kp = konstanta proposional
Ti = waktu integral Td = waktu derivative
Ki = konstanta integral (Kp/Ti) Kd = konstanta derivative (Kp.Td)
E(t) = sinyal error = referensi – keluaran plant = set point – nilai sensor
error (memasukan nilai Kp, Ki, dan Kd berdasarkan hasil output yang didapat), tetapi dalam menggunakan metode ini karakteristik Kp, Ki, dan Kd perlu diperhatikan sehingga kita tidak sembarangan dalam melakukan tuning tersebut.
2.6.1 Kendali Proporsional
Kendali proposional berfungsi untuk memperkuat sinyal kesalahan penggerak (sinyal error), sehingga akan mempercepat keluaran sistem mencapai titik referensi. Hubungan antara input kendalier u(t) dengan sinyal error e(t) terlihat pada persamaan 13.
…………....………...………...(13)
Kp adalah konstanta proposional. Diagram blok kendali proposional ditunjukan pada gambar 2.17.
Gambar 2.17. Diagram Blok Kendali Proposional
2.6.2 Kendali Intergral
Kendali integral pada prinsipnya bertujuan untuk menghilangkan kesalahan pada keadaan stabil (offset) yang biasanya dihasilkan oleh kendali proposional. Hubungan antara output kendali integral u(t) dengan sinyal error e(t) terlihat pada persamaan 14.
Ki adalah konstanta integral. Diagram blok kendali integral ditunjukan pada gambar 2.18.
Gambar 2.18. Diagram Blok Kendali Integral
2.6.3 Kendali Derivative
Kendali derivative dapat disebut pengendali laju, karena output kendali sebanding dengan laju perubahan sinyal error. Hubungan antara output kendali derivative u(t) dengan sinyal error e(t) terlihat pada persamaan 15.
………...(15)
Blok kendali derivative ditunjukan pada gambar 2.19. Kendali derivative tidak akan pernah digunakan sendirian, karena kendalier ini hanya akan aktif pada periode peralihan. Pada periode peralihan, kendali derivative menyebabkan adanya redaman pada sistem sehingga lebih memperkecil lonjakan. Seperti pada kendali proposional, kendali derivative juga tidak dapat menghilangkan offset.
Gambar 2.19. Diagram Blok Kendali Derivative
Gambar 2.20. Diagram Blok Kendali PID.
Tabel 2.1 Efek Setiap Kendali (Kp, Ki, Kd)
Parameter Waktu naik (Rise time)
Overshoot Setting time Steady-state
error
Kp Menurun Meningkat Perubahan Kecil Menurun
Ki Menurun Meningkat Meningkat Menghilangkan
Kd Perubahan Kecil Menurun Menurun Tidak
25
Pemilihan jenis komponen dalam perancangan dan pembuatan suatu perangkat elektronik mutlak dilakukan karena berdampak langsung pada tingkat efisiensi dan efektifitas perangkat yang buat. Beberapa hal yang perlu diperhatikan diantaranya kualitas bahan, daya angkat motor ,ukuran baling-baling,kemampuan ESC, berat, bentuk dan ukuran dimensi frame. Sehingga pada perancangan dan pembuatan quadcopter ini harus diperhatikan karena berpengaruh pada sistem kestabilan quadcopter yang dirancang.
Perancangan sistem kendali permukaan (level) dan ketinggian terbang pesawat quadcopter terdiri dari tuning sistem kendali PID pada program Multiwii , kendali fuzzy untuk kestabilan ketinggian dan perakitan perangkat keras.
Perancangan keras yaitu perakitan quadcopter berasarkan literatur dan panduan manual dari flight controller. Perancangan kendali fuzzy dilakukan dengan melakukan koding pada flight controller dan tuning PID dilakukan dengan cara trial and error.
Perancangan dan realisasi sistem merupakan bagian terpenting dari seluruh pembuatan tugas akhir ini. Perancangan yang baik dan dilakukan secara sistematik akan memberikan kemudahan dalam proses pembuatan alat serta mempermudah dalam proses analisi dari alat yang dibuat.
3.1 Latar Belakang Pemilihan Komponen
3.1.1 Pemilihan Flight Controller
Pemilihan flight controller dilakukan berdasarkan studi literatur dan melakukan tanya jawab dengan penjual. Pemilihan flight controller CRIUS AIOP v2 dikarenakan flight controller tersebut memiliki spesifikasi yang cukup untuk merancang quadcopter dengan logika fuzzy sebagai kendali ketinggian, selain itu CRIUS AIOP v2 mudah digunakan dan dipahami karena banyaknya literatur yang menggunakan flight controller tersebut. CRIUS AIOP v2 sudah memiliki sensor gyro, accelerometer, kompas dan sensor barometer sehingga tidak diperlukan nya lagi sensor eksternal.
Gambar 3.1 Flight Controller CRIUS AIOP v2
3.1.2 Pemilihan Electronic Speed Controller
3.1.3 Pemilihan Motor
Motor yang digunakan adalah motor brushless sunnysky 980kV. Motor merek tersebut sudah memadai untuk mengangkat quadcopter yang akan dirancang. Motor brushless digunakan karena memiliki torsi yang tinggi sehingga quadcopter bisa responsif dan ber-manuver dengan baik.
3.1.4 Pemilihan Baling-baling
Baling baling / propeller yang digunakan memiliki ukuran sepanjang 10” dan lebar bilah 4.5cm. Pemilihan baling-baling disesuaikan dengan torsi motor yang digunakan agar motor tidak cepat panas dan rusak. Ukuran baling-baling
yang bisa digunakan mulai dari 10”dan 11”, karena jika ukuran nya tidak sesuai maka kecepatan motor akan terbuang karena torsi yang dihasilkan akan kecil.
Gambar 3.2 Baling-baling 11”
3.1.5 Pemilihan Frame dan Board
Gambar 3.3 Frame nylon SK-550
3.1.6 Sensor Barometer
Sensor barometer yang digunakan adalah MS5611-01BA generasi baru resolusi tinggi sensor altimeter dengan antarmuka SPI dan I2C 20 MHz. Sensor tekanan ini dioptimalkan untuk altimeter dan variometers dengan resolusi ketinggian 10 cm. Modul sensor termasuk sensor tekanan dengan linearitas yang tinggi dan memiliki ultra low power 24 bit ∆∑ ADC ini memberikan digital 24 bit tekanan dan nilai suhu yang presisi dan mode operasi yang berbeda yang memungkinkan pengguna untuk mengoptimalkan kecepatan konversi dan konsumsi arus. Penggunakan sensor barometer MS5611-01BA karena sensor tersebut sudah berada dirangkaian flight controller yang digunakan.
3.1.7 Sensor Accelerometer dan Gyroscope
3.2 Perancangan sistem kendali
Sistem kendali merupakan hubungan antara komponen membentuk sebuah konfigurasi sistem, yang menghasilkan tanggapan sistem yang diharapkan. Jadi harus ada yang dikendalikan disebut dengan kendalian (plant).
Sistem kendali adalah proses pengaturan ataupun pengendalian terhadap satu atau beberapa besaran (variable, parameter) sehingga berada pada suatu harga tertentu. Sistem kendali yang digunakan pada tugas akhir ini adalah sistem kendali logika fuzzy untuk mengatur kestabilan ketinggian quadcopter pada saat melayang (hovering), dan tuning PID digunakan untuk kestabilan permukaan (level) pada saat take off dan hovering. Kendali PID yang digunakan adalah kendali PID yang telah ada pada program flight controller MultiWii, untuk memasukan nilai parameter nya digunakan WINGUI sebagai aplikasi untuk memonitor dan memasukan nilai setiap parameter PID yang digunakan
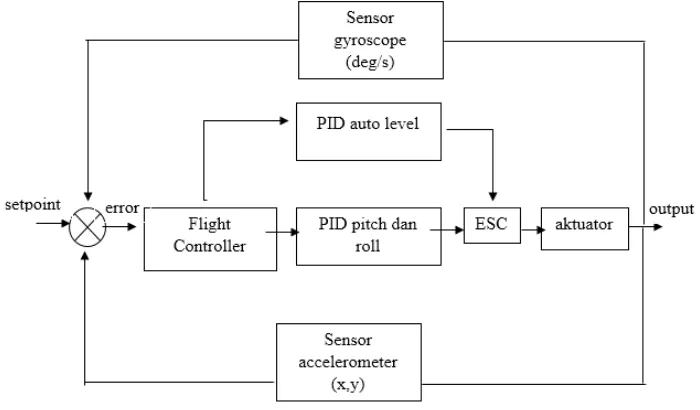
3.3 Kendali PID Pitch dan Roll
Untuk mengendalikan kestabilan permukaan dari quadcopter diperlukan kendali pid, masukan pid berupa nilai sudut dari bacaan accelerometer. Bacaan accelerometer akan dijadikan acuan untuk kestabilan permukaan dan nilai error didapatkan dari selisih setpoint yang diinginkan dengan bacaan barometer yang selanjutnya akan diolah oleh kendali PID. Keluaran dari kendali pid akan masuk ke esc yang akan memberikan nilai torsi yang harus dilakukan. Pada kendali PID sensor accelerometer digunakan sebagai feedback.
3.4 Kendali PID Auto Level
quadcopter,sensor gyroscope akan mengkoreksi nilai percepatan sudut. Dibawah ini merupakan blok diagram kendali PID secara keseluruhan
Gambar 3.4 Flowchart sistem kendali keseluruhan
Pada blok diagram diatas terdapat dua buah kendali PID , yaitu kendali PID roll pitch dan kendali PID auto level. Kendali roll pitch berfungsi sebagai kendali kestabilan untuk masukan dari remote control agar tidak terjadi overshoot dan osilasi pada saat ada input dari RC, sedangkan kendali auto level digunakan untuk mengstabilkan permukaan dari quadcopter agar pada saat melayang quadcopter dapat mempertahankan kestabilan nya walaupun ada gangguan
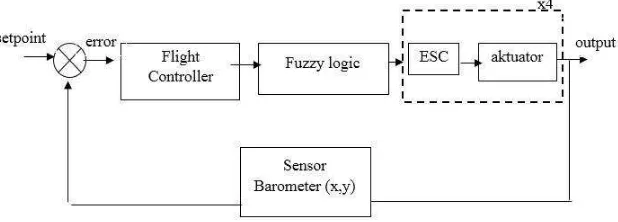
3.5 Kendali Logika Fuzzy
dan diharapkan rentan waktu osilasi untuk mencapai set point pendek. Keluaran aturan fuzzy hanya terdapat satu yaitu T sebagai nilai throttle. Setiap keluaran tersebut diproses dengan aturan yang berlaku pada nilai throttle yang telah ditentukan. Untuk fungsi keanggotaan dan aturan fuzzy inference system pada sistem kestabilan ketinggian quadcopter dapat dilihat pada tabel 3.1 dan tabel 3.2 dibawah .
Gambar 3.5 Struktur kendali fuzzy
Gambar 3.6 Blok diagram kendali Fuzzy
Berikut ini cara perhitungan yang digunakan pada sistem kendali fuzzy : error(t) = SetPoint – PresentValue
d_error = error(t)-error(t-1)
[image:31.595.157.466.454.565.2]error merupakan nilai kesalahan ketinggian dengan cara menghitung selisih setpoint yang ditetapkan dengan bacaan dari barometer, d_error adalah selisih antara nilai kesalahan saat ini dengan nilai kesalahan pada (t-1) atau nilai kesalahan sebelumnya. Setelah mendapatkan nilai throttle kendali fuzzy , nilai torsi setiap motor akan dikurangi dengan nilai throttle kendali fuzzy yang akan menjadi keluaran.
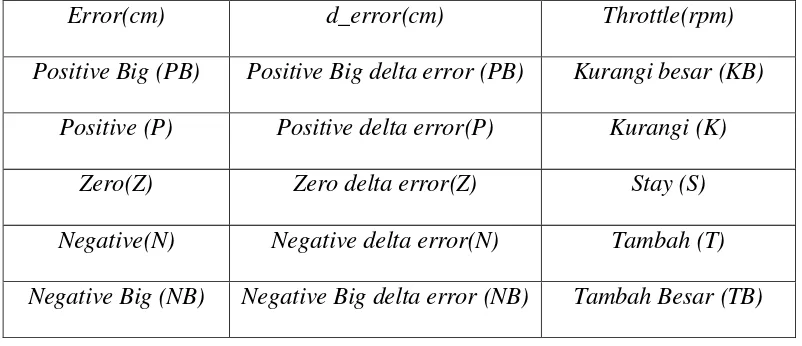
Tabel 3.1 Fungsi keanggotaan pada kestabilan ketinggian quadcopter
Error(cm) d_error(cm) Throttle(rpm)
Positive Big (PB) Positive Big delta error (PB) Kurangi besar (KB) Positive (P) Positive delta error(P) Kurangi (K)
Zero(Z) Zero delta error(Z) Stay (S)
Negative(N) Negative delta error(N) Tambah (T) Negative Big (NB) Negative Big delta error (NB) Tambah Besar (TB)
Tabel 3.2 Aturan Fuzzy pada kestabilan ketinggian quadcopter derror
error
PBdE PdE ZdE NdE NBdE
PB TB T TB T T
P T T T T T
Z T T S K K
N K K K K K
[image:32.595.107.519.501.703.2]Berikut ini penjelasan mengenai fungsi keanggotaan input error yang dirancang : Fungsi keanggotaan Zero (Z) : kurva segitiga dengan domain [5,0,5] Fungsi keanggotaan Positif (P) : kurva segitiga dengan domain [2,5,10] Fungsi keanggotaan Positif Big (PB) : kurva trapesium dengan domain
[5,10,20,30]
Fungsi keanggotaan Negatif (N) : kurva segitiga dengan domain[-10,-5,-2] Fungsi keanggotaan Negatif Big(NB) : kurva trapesium dengan domain
[-30,-20,-10,-5]
fungsi keanggotaan input d_error yang dirancang :
Fungsi keanggotaan Zero (ZdE) : kurva segitiga dengan domain [0.5,0,0.5]
Fungsi keanggotaan Positif (PdE) : kurva segitiga dengan domain [0.2,0.5,1]
Fungsi keanggotaan Positif Big (PBdE) : kurva trapesium dengan domain [0.5,1,2,3]
Fungsi keanggotaan Negatif (NdE) : kurva segitiga dengan domain [-1,-0.5,-0.2]
Fungsi keanggotaan Negatif Big(NBdE) : kurva trapesium dengan domain [-3,-2,-1,-0.5]
fungsi keanggotaan output torsi yang dirancang :
Fungsi keanggotaan Stay (S) : kurva segitiga dengan domain [-2.5,0,3.5] Fungsi keanggotaan Tambah (T) : kurva segitiga dengan domain [2,5,10] Fungsi keanggotaan Tambah Banyak (TB) : kurva trapesium dengan
Fungsi keanggotaan Kurangi (K) : kurva segitiga dengan domain [-10,-5,-2]
Fungsi keanggotaan kurangi banyak (KB) : kurva trapesium dengan domain [-30,-20,-10,-5]
Metode yang digunakan untuk AND adalah nilai minimun dan OR adalah nilai maksimun. Fuzzy inteference sistem yang digunakan adalah Mamdani dengan deffuzzyfikasi yang digunakan adalah deffuzzyfikasi Centroid Of Area. 3.4 Perancangan Perangkat lunak
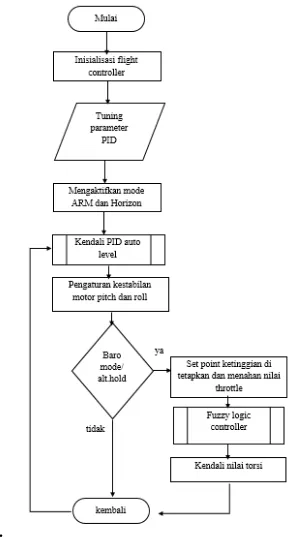
Perancangan perangkat lunak bertujuan untuk menentukan setiap alur eksekusi dari perangkat quadcopter yang dirancang. Setiap masukan yang diterima akan diatur oleh perangkat lunak selanjutnya akan diproses untuk menentuka eksekusi pada bagian keluaran. Berikut adalah flow chart dari sistem yang dirancang
[image:34.595.248.393.453.722.2].
Hal yang pertama dilakukan adalah inisialisasi flight controller untuk insialisasi esc , insialisasi sensor gyro , sensor accelerometer,dan sensor barometer. Setelah itu dengan parameter PID dimasukan untuk selanjut nya digunakan dalam kestabilan auto level. Selanjutnya PID auto level yang telah dituning akan mengatur respon sudut dari pitch dan roll. Kestabilan ketinggian diaktifkan jika mode baro aktif. Pada saat mode baro aktif maka nilai torsi akan dikunci dan menetapkan nilai setpoint ketinggian. Setelah itu kendali fuzzy akan menghitung nilai error dan d_error yang nanti akan menjadi masukan untuk fuzzy interference sistem, setelah mendapatkan nilai ketinggian yang harus dicapai maka kendali fuzzy akan mengeluarkan output yang berupa penambahan atau pengurangan nilai torsi agar quacopter dapat mencapai setpoint yang telah ditetapkan.
3.4 Perakitan Perangkat Keras
Perakitan perangkat keras dilakukan berdasarkan hasil pemilihan komponen yang telah dilakukan. Quadcopter yang dirakit pada tugas akhir ini berfungsi sebagai pemantau keadaan dari udara, sehingga pada saat melayang quadcopter dapat melayang dengan stabil, walaupun ada gangguan. Berikut ini spesifikasi dari quadcopter yang dirakit.
Tabel 3.3 Spesifikasi Quadcopter yang dirakit
No. Item Jumlah Merk
1 Frame X- Copter 1 Nylon SK-550 2 propeller 2 CW, 2CCW Qprop
3 Motor Brushless 4 Sunnysky 980kV
4 ESC 4 RC timer 30 A
5 Flight Controller 1 Crius AIOP v2
6 Baterai 1 Turnigy 3s 5000mAh
Berdasarkan spesifikasi diatas, quadcopter memiliki performa yang optimal untuk digunakan sebagai pemantau di udara. Quadcopter yang dirancang memilki berat sebesar 1.5 kg, tinggi 4.5 cm dan sisi 45 cm
Gambar 3.8 Bentuk quadcopter yang dirakit
Perakitan quadcopter dilakukan berdasarkan refensi literatur yang menjelaskan cara merakit quadcopter. Berikut ini blok diagram dari quadcopter .
Gambar 3.9 Blok Diagram Quadcopter
[image:36.595.130.487.403.540.2]controller, untuk meng-setting nilai nilai PID untuk kestabilan quadcopter dan nilai sensor pada flight controller
38 BAB IV
PENGUJIAN DAN ANALISIS
Pada bab ini akan diuraikan mengenai proses pengujian dari sistem yang dirancang. Dimana pengujian yang dilakukan meliputi pengukuran terhadap komponen masukan, proses dan output keluaran yang terdapat dalam sistem yang dirancang kemudian dilanjutkan dengan menganalisis hasil pengukuran tersebut. Hal ini bertujuan untuk melihat performa sistem yang dirancang
4.1 Pengujian dan Analisis Bagian Masukan
Pengujian dan analisis bagian masukan input terdiri dari pengujian sensor barometer, sensor accelerometer dan sensor gyroscope
4.1.1 Pengujian Sensor Barometer
Tabel 4.1 Hasil pengukuran ketinggian sensor barometer Pengukuran secara manual (cm) Ketinggian terukur sensor (cm)
10 13
20 21
50 55
100 105
120 125
Pada saat quadcopter diangkat sebesar 10cm , bacaan dari barometer menunjukan bahwa ketinggian quadcopter sebesar 13cm, setelah itu quadcopter diangkat dengan ketinggian 20cm dengan pengukuran manual, bacaan barometer menunjukan ketinggian 21cm
Dari hasil pengujian tabel 4.1 menggunakan sensor barometer, dapat diketahui bahwa pengukuran yang dilakukan sensor mendekati ketinggian sesungguhnya.
4.1.2 Pengujian Sensor Accelerometer
4.2 Tabel hasil pengujian accelerometer
No. Arah Mekanik Roll (x) Pitch (y)
1 Miring kedepan -10 150
2 Miring kebelakang 3 -150
3 Permukaan datar 0 0
4 Miring ke kanan 250 2
5 Miring ke kiri -250 10
Pada saat quadcopter dimiringkan ke depan bacaan dari accelerometer menunjukan bahwa nilai sumbu dari pitch menjadi 150, untuk kemiringan kearah belakang bacaan dari accelerometer menunjukan angka -150, selanjutnya pengujian pada sumbu roll yang dilakukan dengan cara memiringkan permukaan dari quadcopter. Pengujian sumbu roll mendapatkan hasil yang sesuai dengan permukaan dari quadcopter
[image:40.595.135.488.530.699.2]Dari tabel di atas dapat diketahui bahwa nilai setiap sumbu accelerometer sudah sesuai dengan arah mekanik robot
4.1.3 Pengujian Sensor Gyroscope
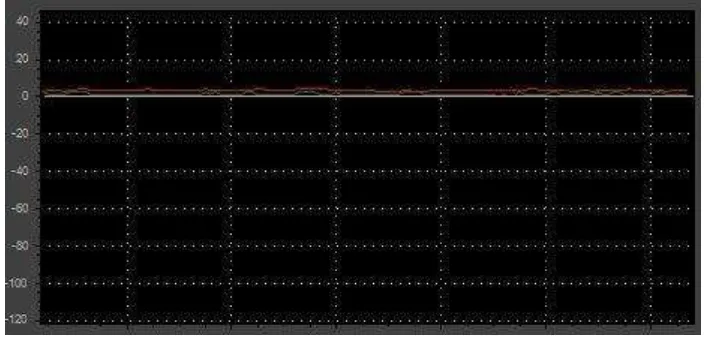
[image:41.595.160.463.329.475.2]Pengujian gyroscope bertujuan untuk mengetahui tingkat keakuratan dari gyroscope dalam membaca perubahan kecepatan sudut yang dinamis dari quadcopter. Sensor gyroscope yang digunakan akan mempunyai nilai keluaran jika sedang berotasi searah jarum jam pada sumbu Y, maka tegangan keluarannya akan mengecil. Sedangkan jika berotasi berlawanan arah jarum jam, maka tegangan keluarannya akan membesar. Jika sensor gyroscope tidak berotasi (keadaan diam) maka keluaran tegangan gyroscope akan bernilai sama dengan nilai offsetnya.
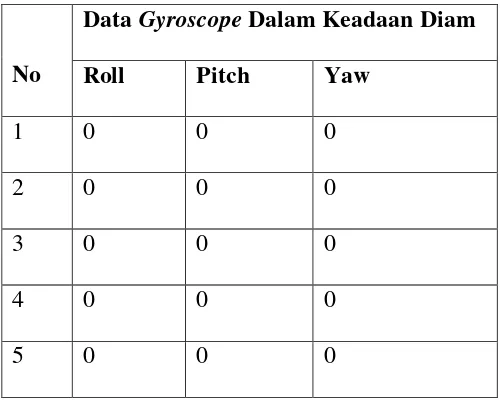
Gambar 4.2 sensor gyroscope pada saat diam Tabel 4.3 hasil pengujian gyroscope saat diam
No
Data Gyroscope Dalam Keadaan Diam Roll Pitch Yaw
1 0 0 0
2 0 0 0
3 0 0 0
4 0 0 0
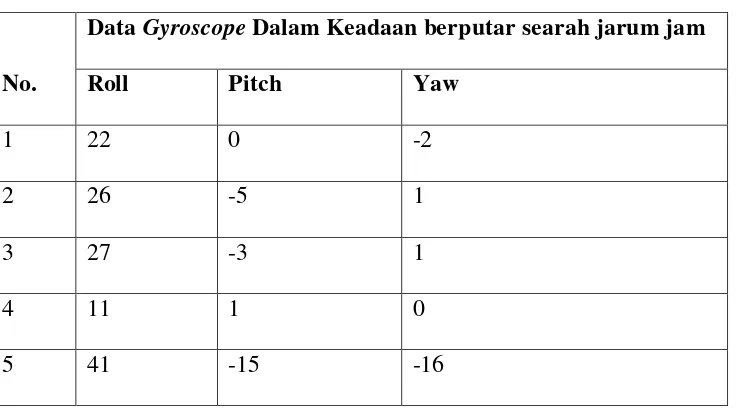
[image:41.595.187.437.545.746.2]Tabel 4.4 hasil pengujian gyroscope saat berputar searah jarum jam
No.
Data Gyroscope Dalam Keadaan berputar searah jarum jam
Roll Pitch Yaw
1 22 0 -2
2 26 -5 1
3 27 -3 1
4 11 1 0
5 41 -15 -16
Data pengujian sensor gyroscope didapatkan melalui logs data yang dihasilkan oleh GUI dari program flight controller yang digunakan.
4.2 Pengujian dan Analisis Bagian Proses
Tujuan dari pengujian ini untuk mengimplementasikan masukan, proses dan keluaran. Kendali PID digunakan untuk kestabilan permukaan (level) dan kestabilan ketinggian menggunakan kendali fuzzy logic. Analisis yang dilakukan pada kendaliler PID auto level. Cara yang dilakukan untuk mendapatkan parameter kendali pid dengan cara tuning trial and error
4.2.1 Pengujian dan Analisis kendali sudut Pitch(Y) dan Roll(X)
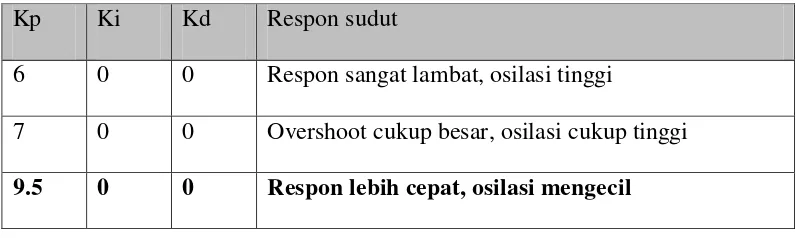
Tabel 4.5 Pengujian kendali proporsional sumbu roll
Kp Ki Kd Respon sudut
6 0 0 Respon sangat lambat, osilasi tinggi
7 0 0 Overshoot cukup besar, osilasi cukup tinggi 9.5 0 0 Respon lebih cepat, osilasi mengecil
Tabel 4.6 Pengujian kendali proporsional dan integral sumbu roll
Kp Ki Kd Respon sudut
9.5 0,005 0 Tidak bisa mempertahankan posisi 9,5 0,01 0 Attitude cukup tertahan
9,5 0,15 0 Osilasi yang tinggi
Tabel 4.7 pengujian kendali proporsional, integral dan differensial sumbu roll
Kp Ki Kd Respon sudut
9.5 0,01 25 Respon Osilasi mengecil
[image:43.595.107.511.503.621.2]Tabel 4.8 pengujian kendali proporsional sumbu pitch
Kp Ki Kd Respon sudut
5 0 0 Respon sangat lambat
8 0 0 Respon masih lambat
[image:44.595.107.507.112.229.2]12,8 0 0 Respon lebih cepat, osilasi mengecil
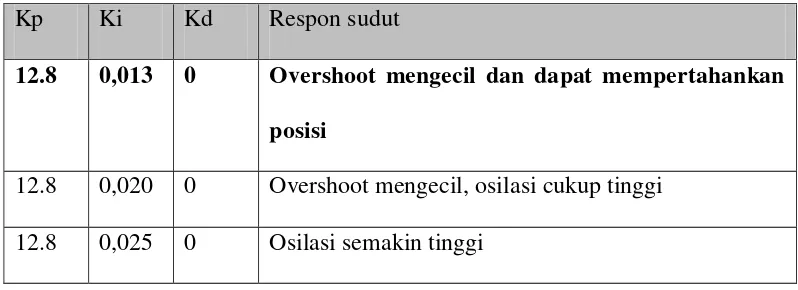
Tabel 4.9 pengujian kendali proporsional dan integral sumbu pitch
Kp Ki Kd Respon sudut
12.8 0,013 0 Overshoot mengecil dan dapat mempertahankan posisi
12.8 0,020 0 Overshoot mengecil, osilasi cukup tinggi 12.8 0,025 0 Osilasi semakin tinggi
Tabel 4.10 pengujian kendali proporsional, integral dan differensial sumbu pitch
Kp Ki Kd Respon sudut
12.8 0,013 20 Respon cepat , Osilasi mengecil
12.8 0,013 60 Respon melambat, osilasi sangat kecil 12.8 0,013 80 Respon lambat dan terjadi osilasi
[image:44.595.106.505.279.424.2]4.2.2 Pengujian dan Analisis Kendali Auto Level PID
Pengujian kendali pada auto level PID dengan cara melihat respon dari sistem, tuning dilakukan dengan cara trial and error, dan juga melihat referensi tuning pid
Tabel 4.11 pengujian kendali proporsional
Kp Ki Kd Respon sudut
5 0 0 Respon sangat lambat, osilasi tinggi
[image:45.595.114.507.217.337.2]8 0 0 Respon cukup cepat, osilasi semakin mengecil 10 0 0 Respon lebih cepat, osilasi mengecil
Tabel 4.12 Pengujian kendali proporsional dan integral
Kp Ki Kd Respon sudut
10 0,05 0 Tidak bisa mempertahankan attitude 10 0,1 0 Attitude cukup tertahan
10 0,15 0 Terjadi osilasi yang cukup besar
Tabel 4.13 Pengujian kendali proporsional, integral dan differensial
Kp Ki Kd Respon sudut
10 0,1 60 Respon cepat, osilasi tinggi
10 0,1 75 Respon cukup cepat, osilasi mengecil
[image:45.595.107.506.385.505.2]Tabel diatas merupakan hasil tuning PID pada kendalier quadcopter yang menyebabkan quadcopter mampu menjaga dan mempertahankan posisi
4.2.3 pengujian dan analisis kendali fuzzy
Tujuan dari pengujian ini adalah untuk mengimplementasikan masukan, proses dan keluaran dengan fuzzy rule kedalam flight controller. Pengujian dilakukan melalui simulasi fuzzy Matlab. Pengamatan hasil dimaksudkan untuk mendapatkan nilai torsi yang diharapkan. Berikut ini adalah fungsi keanggotaan error dan d_error.
[image:46.595.115.511.369.493.2]Perancangan kendali fuzzy dibuat berdasarkan nilai dan parameter yang telah dijelaskan pada bab sebelumnya
Gambar 4.3 Fungsi keanggotaan error
[image:46.595.112.515.370.646.2]Gambar 4.5 Fungsi keanggotaan output
Pada fungsi keanggotaan error dan derror nilai masukannya berupa jarak dalam centimeter, sedangkan dalam fungsi keanggotaan output nilai keluaran nya adalah nilai torsi yang akan di proses di flight controller.
Berikut ini adalah listing program yang diterapkan pada mikrokontroller dengan menggunakan arduino dan Embeded Fuzzy Logic Library (eFLL).
Gambar 4.7 Tampilan listing Program Fuzzy Rule
Gambar 4.9 Hasil simulasi MATLAB error= 4.77 dan d_error=-0.345
[image:49.595.109.514.76.480.2]4.3 Pengujian dan Analisis Bagian Keluaran
[image:50.595.136.489.213.449.2]Pengujian dilakukan untuk mengetahui respon keluaran terhadap input transmitter, apabila diberikan masukan berupa kendali propeller, output motor berupa nilai duty cycle
Tabel 4.14 Respon motor terhadap inputan transmittter Input
transmitter
Nilai torsi motor brushless (rpm) Motor 1 Motor 2 Motor 3 Motor 4
Pitch depan 1000 1000 1500 1500
Pitch belakang 1500 1500 1000 1000
Roll kanan 1000 1500 1000 1500
Roll kiri 1500 1000 1500 1000
Yaw CW 1500 1000 1000 1500
Yaw CCW 1000 1500 1500 1000
Pengujian keluaram motor dilakukan untuk mengetahui respon dari motor terhadap perubahan nilai dari transmitter. Pada saat transmitter memberikan input pitch yang besar dari nilai netral stick , maka motor akan bermanuver kedepan , begitu juga pada saat diberikan nilai input roll yang besar, keluaran dari motor sesuai dengan yang diharapkan
4.4 Hasil Implementasi Pada Sistem
[image:50.595.136.490.218.447.2]Gambar 4.11 Respon sudut pitch dimiringkan sebesar 10 derajat kedepan Dari gambar di atas menunjukan bahwa quadcopter dapat mempertahankan posisi dengan bentuk gangguan dimiringkan sebesar 10 derajat, akan tetapi pada grafik diatas terdapat nilai osilasi yang cukup sedikit yang menyebabkan quadcopter drift kearah depan.
Gambar 4.12 Respon sudut pitch dimiringkan sebesar 10 derajat kebelakang Pada pengujian sudut pitch dengan memiringkan quadcopter ke belakang, dapat disimpulkan bahwa sudut pitch dari quadcopter dapat merespon dengan cepat gangguan yang diberikan akan tetapi nilai dari steady state error yang tinggi yang menyebabkan pergerakan quadcopter sedikit maju.
sumbu pitch sumbu pitch
setpoint
[image:51.595.159.468.395.541.2]Gambar 4.13 Respon sudut roll dimiringkan sebesar 10 derajat kekanan Pada pengujian sudut roll kearah positif dapat disimpulkan bahwa sudut roll mempunyai nilai steady state error yang kecil sehingga nilai pergerakan kestabilan sumbu roll tidak menyebabkan drifting pada quadcopter.
Gambar 4.14 Respon sudut roll dimiringkan sebesar 10 derajat kekiri Pengujian auto level tuning pid secara keseluruhan dapat disimpulkan bahwa sistem kendali auto level sudah berjalan sesuai dengan yang diharapkan, pembacaan nilai steady state error yang ditunjukan oleh grafik tidak terlihat jelas oleh mata, akan tetapi nilai steady state error tersebut cukup mempengaruhi dalam hovering quadcopter.
Kendali fuzzy digunakan untuk menahan ketinggian, dibawah ini merupakan hasil respon sistem kendali fuzzy altitude hold.
sumbu roll setpoint
[image:52.595.155.470.356.509.2]Gambar 4.15 Grafik respon sistem fuzzy pada ketinggian 1m
Gambar 4.16 Respon sistem fuzzy pada ketinggian 1.2m
[image:53.595.178.448.280.446.2]54 5.1 Kesimpulan
Berdasarkan hasil perancangan dan pengujian serta analisis data dari sistem kestabilan permukaan menggunakan tuning PID dan kestabilan ketinggian menggunakan logika fuzzy yang dibahas pada penulisan laporan tugas akhir ini, dapat diambil beberapa kesimpulan berkaitan dengan hasil analisis yang mengacu kepada tujuan perancangan sistem kestabilan quadcopter ini.
1. Dalam perancangan quadcopter banyak sekali pertimbangan untuk menentukan komponen yang digunakan. Perancangan quadcopter disuaikan dengan tujuan quadcopter yang dirancang, jika quadcopter digunakan untuk bermanuver akrobat maka digunakan frame yang ringan, motor yang memilki Kv yang tinggi dan propeller ukuran bilah kecil sehingga quadcopter dapat bermanuver dan merespon masuk dari telemetri dengan cepat. Quadcopter yang digunakan untuk terbang stabil menggunakan frame yang kokoh dan ringan, motor yang memilki nilai Kv tinggi,dan propeller dengan ukuran bilah besar agar daya angkat dari motor bisa dimaksimalkan sehingga quadcopter dapat merespon nilai torsi dari telemetri dengan baik dan dapat mengangkat beban yang cukup berat seperti kamera, atau catu daya yang lebih besar
saat hovering masih terjadi osilasi pada bacaan accelerometer yang menyebabkan terjadinya drifting pada sumbu pitch
3. Penerepan metode logika fuzzy untuk kestabilan ketinggian quadcopter belum berfungsi dengan baik dalam tugas akhir ini, karena adanya kesalahan dalam program kendali logika fuzzy yang diterapkan pada flight controller sehingga terjadi nilai error yang cukup besar pada sistem kendali logika fuzzy
4. Pengaruh noise pada barometer memberikan nilai error yang cukup tinggi sehingga menyulitkan dalam menentukan bacaan dari barometer
5.2 Saran
untuk pengembangan dan peningkatan lebih lanjut dari sistem kestabilan permukaan menggunakan tuning PID dan kestabilan ketinggian menggunakan logika fuzzy ada beberapa poin yang perlu diperhatikan dalam perancangan nya.
1. Quadcopter dapat membawa beban yang cukup berat, sehingga quadcopter dapat berfungsi sebagai pengantar barang
2. Penggunaan auto tuning pada kendali pitch, roll dan level agar bisa beradaptasi dengan cepat terhadap bentuk quadcopter dan gangguan
vi
LEMBAR PENGESAHAN ... i
ABSTRAK ... ii
ABSTRACT... iii
KATA PENGANTAR ... iv
DAFTAR ISI ... vi
DAFTAR GAMBAR ... ix
DAFTAR TABEL ... xi
BAB I PENDAHULUAN ... 1
1.1 Latar Belakang ... 1
1.2 Identifikasi Masalah ... 2
1.3 Rumusan Masalah ... 2
1.4 Tujuan... 2
1.5 Batasan Masalah ... 2
1.6 Metoda Penelitian ... 3
1.7 Sistematika Penulisan Laporan ... 4
BAB II DASAR TEORI ... 5
2.1Sekilas Tentang Aeromodeling ... 5
2.2 Sekilas Tentang Quadcopter ... 6
2.3 Prinsip Kerja Quadcopter ... 6
2.4.1 Flight Controller ... 8
2.4.2 Electronic Speed Controller (ESC)... 9
2.4.3 Catu daya ... 9
2.4.4 Motor Brushless ... 9
2.4.5 Sensor Accelerometer ... 10
2.4.6 Sensor Gyroscope ... 11
2.5 Logika Fuzzy ... 11
2.5.1 Himpunan Fuzzy... 12
2.5.2 Fungsi Keanggotaan ... 13
2.5.3 Operator Fuzzy ... 17
2.5.4 Fuzzy Inference System... 18
2.6 Kendali PID ... 20
2.6.1 Kendali Proporsional ... 22
2.6.2 Kendali Intergral ... 22
2.6.3 Kendali Derivative ... 23
3.1 Latar Belakang Pemilihan Komponen ... 25
3.1.1 Pemilihan Flight Controller ... 26
3.1.2 Pemilihan Electronic Speed Controller ... 26
3.1.3Pemilihan Motor ... 27
3.1.4 Pemilihan Baling-baling ... 27
3.1.5Pemilihan Frame dan Board ... 27
3.1.6 Sensor Barometer ... 28
3.1.7 Sensor Accelerometer dan Gyroscope ... 28
3.3 Kendali PID Pitch dan Roll ... 29
3.4 Kendali PID Auto Level ... 29
3.5 Kendali Logika Fuzzy ... 30
3.4 Perancangan Perangkat lunak ... 33
3.4 Perakitan Perangkat Keras ... 35
BAB IV PENGUJIAN DAN ANALISIS ... 38
4.1 Pengujian dan Analisis Bagian Masukan ... 38
4.1.1 Pengujian Sensor Barometer ... 38
4.1.2 Pengujian Sensor Accelerometer ... 39
4.1.3 Pengujian Sensor Gyroscope ... 41
4.2 Pengujian dan Analisis Bagian Proses ... 42
4.2.1 Pengujian dan Analisis kendali sudut Pitch(Y) dan Roll(X) ... 42
4.2.2 Pengujian dan Analisis Kendali Auto Level PID ... 45
4.2.3 pengujian dan analisis kendali fuzzy ... 46
4.3 Pengujian dan Analisis Bagian Keluaran ... 50
4.4 Hasil Implementasi Pada Sistem ... 50
BAB V PENUTUP ... 54
5.1 Kesimpulan ... 54
5.2 Saran ... 55
DAFTAR PUSTAKA ... 56
56
[1] Ramlan,Okta Rusdiansyah. Sistem Otomatisasi Pengaturan Rem Pada Mobil Berbasis Mikrokontoler Menggunakan Logika Fuzzy, Bandung : UNIKOM [2]
http://www.zerokol.com/2012/09/arduinofuzzy-fuzzy-library-for-arduino.html
[3] Wicaksono, Hendi dkk.2014.Altitude Lock Design for Quadcopter using Sonar Based on Fuzzy Controller,Surabaya:Universitas Surabaya
[4] http://www.multiwii.com/forum/viewtopic.php?f=18&t=4757 [9] http://www.multiwii.com/wiki/?title=PID
[10] http://www.starlino.com/imu_guide.html
iv
rahmat dan hidayah-Nya sehingga penulis dapat menyelesaikan perancangan alat dan penyusunan laporan tugas akhir dengan judul “Implementasi Kendali Fuzzy Untuk Kestabilan Ketinggian Quadcopter”. Dan juga tidak lupa shalawat serta salam senantiasa tercurah kepada junjungan kita, Nabi Muhammad SAW beserta umat yang mengikuti ajarannya hingga akhir zaman. Penulisan laporan tugas akhir ini disusun untuk memenuhi salah satu persyaratan untuk mencapai S-1 Jurusan Teknik Elektro, Fakultas Teknik dan Ilmu Komputer, Universitas Komputer Indonesia, Bandung.
Penulis menyadari bahwa tugas akhir ini jauh dari kata sempurna, dikarenakan keterbatasan penulis, baik dalam penyajian materi, sistematika penulisan, sumber referensi, pengetahuan serta pengalaman penulis. Penulis mengharapkan tugas akhir ini dapat memberikan ilmu yang baik khusus bagi penulis dan umumnya pada pembaca.
Pada kesempatan ini, penulis menyampaikan terima kasih kepada :
1. Orang tua dan keluarga yang senantiasa memberikan semangat dan doa restu;
2. Dr. Ir. Eddy Suryanto Soegoto, M. Sc., selaku Rektor Universitas Komputer Indonesia, Bandung;
4. Muhammad Aria, M.T. sebagai Ketua Program Studi Teknik Elektro Fakultas Teknik dan Ilmu Komputer, Universitas Komputer Indonesia, Bandung;
5. Tri Rahajoeningroem, M.T. sebagai Koordinator Tugas akhir Program Studi Teknik Elektro, Universitas Komputer Indonesia, Bandung;
6. Rodi Hartono, M.T., selaku Dosen Pembimbing yang selalu memberikan arahan, ilmu, ide dan motivasinya kepada penulis selama pembuatan alat dan penulisan laporan tugas akhir ini;
7. Keluarga penulis, yang selalu memberikan do’a dan motivasi mereka kepada penulis;
8. Rekan mahasiswa Redi Fitdriansyah, Asep Kuat Jaenudin, Deden Riki, Yudi Yusana, Iqbal Fajar, dan Riesky Faisal selaku teman-teman penulis yang selama ini seringkali berbagi pengalaman mereka, memberikan ide, ilmu dan motivasi mereka;
9. Rekan Johan Purba, Rizal Anugrah, Wildan Qodaris, Fadlan, dan seluruh rekan perkumpulan BC yang memberikan motivasi dan pengalaman mereka yang telah membantu dalam tugas akhir ini 10. Berbagai pihak lain yang tidak bisa disebutkan satu persatu.
Bandung,10 Maret 2016
DATA PRIBADI
1. Nama Lengkap : Sandra Anggagita
2. Tempat, Tanggal Lahir : Bandung, 02 November 1992
3. Domisili : Bandung
4. Jenis Kelamin : Laki Laki
5. Agama : Muslim
6. Status : Belum Menikah
7. Tinggi / Berat Badan : 165 / 50
8. Telepon : 022 7101983
6. Email : [email protected]
RIWAYAT PENDIDIKAN
FORMAL
1. (1999) Lulus TK Aisyah - Bandung
2. (2005) Lulus SDN Cimuncang I - Bandung 3. (2008) Lulus SMPN 16 - Bandung