OPTIMASI TETAK RODA
lf4'lfn
DAN TITIK GANDENG PAOA SISTEM GAiIDENG WHGHT IRAruSFFFsam Herodianl), saifut
A:iir,
Ram:Vanti Butan3)Departemen Teknik Pertanian, Fa kulta s Teknologi pe(ani3n
lnstitut Pertanian Bogor
ABSTRAK
Penelitiar
ini
bertujuan untuk membuat modet simulasi untuk mencari letaktitik
berattraktor
dantroiler
berporostunggal den1a
sistem gandeng weighttrantfer yatg
ideal,
dengan pengaturanleta*
rcdatraiter
yang berubah_ubah.. Simulasi dilakukan dengan menggunakan bantuan pem.ograman berbasis visualdengan Object Oriented
Prcgrdming.
Letak
roda
trdle, y:ng
tepat
akan memberikandampak
kepada kestabilan pengendaliantrakor
sehinggga akan mensuransiefek kerusakan pada titiksandene dan merninimatkan kerusakan tahan karenapemb€hnan. Out put
penelirian ini jusa dapat menjadi dasar pemitihantanis
traltor
yang sesra'
dengal
p-mb^brn,rn re-LFnlu oerarcan8d. ro,/e,
dilakukan densan berdasarkan
4
pertimbansan desain antara tainrBerat
beban trdileryans dipind:hkan ketftktat,
besat Groundprerjule
yang diijinkan dan besarbeb:n
maks rodatraktor,
letak poros rodarroiler dari
titik
gandeng serta nilai kestabilantraktord.n
tro,/erpada saat proses kansportasi.K:ta ku nci : tra
kor,
t
dile r, weight tronslet,titik be.€r
PENDAHULUAN
Traktor
roda
4
yang dis:mbung densan
unir
troiter berporcs
tunggat merup3kan salahs;tu
alat
transportasi yang digunakan.untuk mengangkut tebu hasil tebanean. Dalam prakreknya alatini
masih mengalami beberapa hambatan antara lain siip, kerusakanpad.
komponen samb!ngan, kerusakan pada roda dan kerusakan pada chasistrailer.
Hambatai-hambatan
tersebut m:yoritas
disebabkanketidak tepatan
l€tak rodatrailer
serta beban anekut yane berlebihan.peneliti:n :kan
modifikasi rrotler dengan penemp.tan letak rodat/o/er
yang tepat,:kan
menjadikan perpindahanberat
dari
troller
ke
traktor menj.di
lebih optimat sehirgga
hambatan dan kerusakan baik padat/oiler
ataupun d rawba r t.aktor dapat dihindariPenelitian
ini
bertujuan untuk menrbuat modet simulast untuk mencari letakz.
1_
3.
MFTOOE PENELITIAN
P€ngukuran dimensiutama unittrai/€i. traktor dan sistem
rttchrrq
Pengukuran meliputi dimenri
traktor
dan troiler secara keseluruhan. Dimensi yang diukurmeliputijarak:ntar
.oda, tinggi drowbar, jarak sumbu riaprod:,
ja.ak antara alah gaya drowrortelhadap titik
p!sat
penyanggaujitimbang
Letak
titik
berat ho.isontal dapat dltentukan dengan cara penimbangandalam
keadaan bodytraktor/ tratler
lurus. Ujitimbans
sekalisus dieunakanuntuk
menSet?hui beban cayapsda
setiaproda traktor dan r/diler
serta pemindahanberat
kepadatraktor
sebagaiunit penarik. Menuru!
Goering(19891
letak
titik
berat
pada sumbu horkontal dapat diduga
dengan meflssunalan uii timbane densan posisi penimbanaanMenurut Barger (1958) leta(
titik
be.at pada sumbu vertikal dapat didugade.gan
menggunakan uji timbangdeng.n
posisi penimbangan midng. Dalampenelitian ini
digunakan metode moment pertamaunt!k
menghitung leraktitik
beratv€rtil(al. Moment pertama mempe.hitunskan letaktitik pusat massa chasis tro.i/e/ dan beban angkut yang adadi
dalam bak penampung/ dengan asumsib€ntuk
chasisdao
b.k
penampung adalahempat
perseei panjang dengan penyebaran massa yensmerat: di semua titik.Membuat model simolasi
Simulasi dilakukan densan modifikasi letak
rod:
troll€.. Simuiasi dilakukan b€ik terhadaprrollerdeng:n
pembebanan ataupun tanpa p€mbebanan.Simulasi
ini
bertuiuan untuk m€ncari
posisiroda tratle/ yang
tep:t
sehingga dihasilkan
let:k titik
berat optimal.
Posisiyang
tepat
al€n b€rpengaruh terhadapletak titik
pusat massa (centerolqrdvity)
pada traktor Simulasi dilakukan dengan menggunakar pemogramanbedasis
visual denEan object orientedProqftnlng
lOOPl.Perangkat lLrnak
ini
dapat memperlancar pelaksanaan simulasi karen: menghasilkandabn:ta
visualdari
setiap parameter yang dicantumkan pada proses simulasi. Trainins akandilakuk:n
densan/oopln!'
berulangkali pada setiap data masukan sehinggaak:n
diperoleh ni{ai-nilai dimensitmiler
yans dikelienda ki u ntu k setiap traktor densan pembebanan tertentu.HA5IL DAN PEMsAHPSAN
Pemilihan
jenis traktor dan trdiler
yang dibutuhkan dalam
proses transportasi dapat dilakukan dari beber.pa aspek yait{.r dari segi perancansanfroler
dan
spesifikasitraktor
yang digunakansesu.i
dengan beban angklt.a.
Perhitunganletak
titik
berat
horisontaldan ve.tikal optimal
baikkaktor
ataupuntroler
.b.
Bentuk dan karakte.istik tahan.c.
Model dan dimensifroleryang
umum digun.kan datam kegiatan rrafisportasi hasil pertanian dari lahan k€ factoryd- l€nis traktoryang digunal(an dalam proses transportasi
Sedangkan perancangan
dimensi
f/o/er
dapat dimulai
dari
beberapa pendekatan antara lain i
a.
Beban angkut frotler maksimat yang d ike h€ nda kib.
Berat beban troileryane dipindahkan ketrjktor
c.
BesatGround pressure yang diiinkan dan besar beban maks roda tral,tord.
Leta k poros .oda rroil€. dari titi k gandenge. Nilaik€st
bilan traktordan fro,iler pada saat proses transportasiPemilihan
traktor
sebagaiuoit
penadktroiler dapat
dilakukan dengan beberapa pendekatan antara lain :a.
Daya minimalyang harus dim iliki traktoruntut
bebantariktertentu
b.
Beban gaya pada roda traktorc.
Kestabilan pengendalian tr3ktorSedangkan perancangan dimensi trajle,.
dil:kukan
dengan cara sebagai1.
Pendekatan Eeban Angkutrroiler
Maksimum.
Dimensif/a/€r
ditentukan dengan jumtah beban anskut maksimat yang dikehendaki. Dengan asumsi tebu dapat disusuns:nsat
rapat {tidakad;
celahi dan
mempunyai massajenis yanc
serasamvotume maka
bak penampungyang dibutuhl(an dapat dihitung dengan menggunakan rumus,.
BAT
...(1) pbb,
Ybk = Vollme bak penampung (cm3)
8Ar-
Beban AnCkutTeb! (kc) pr.b, = [.4assajenis tebu (kglcmr)fc
= faktor koreksi.
Dimefsi meliputi lebar
chasis,tinsgi
bak
penampung, panjans
bak penampung dan panjang chasis. Adapun kaidah penentuao dimensirrdi/er te.sebut ditent!kan oteh :a- Lebar chasis min (asu,l sj lebor bak
penanpuns
= tebor cho5tsl direntuk.nol.h
leba';rr.,
trn:m
dar
tpoar roda)a.g dieLn:ran
vaagdirLrLst.an
f.
c
I
min =
(nxJT\
+(n x
LG)+
(2x
LR\
...(2)n
-
bilanean eenapm
=
bilangan ganjil/."
=
lebarchasisminimlm
lT
=jaraktanam LG = lebar guiudanTinggi bak penampung
maksimum
direntukan oleh tinggi bak penampung yang diijinkan agar dapat masuk ke area penggilingandi
pabrik gula. Tinggibak
penampungsangat spesiflk berbeda anta.a setiap pzbrik.
Dalam penelitianini
digunakan tinggi bak penampung maksimum yang digunakantrailer
pensanekuttebu
di
PT.Gul:
Putih Mataram
dengafltinggi
bak penampung dad tanah sebesar 27s.72 cm.Panjang bak penampung t€rgantung
dsri
b€rapa volumeb:k
penampung yang dibutuhkan. Panjans bak penampuns Yang optimal akan berpengaruh terhadap kelancaran proses transportasi, dimana tebu tidak akan berceceran sehingga resikolost
canedapat
dikurangi. Dengan asumsitebu
tersuslrn deng:n padal tanpacel.h
dengan massa jenis seracam maka besar volume bak penampLrne dapatditent!kan
h. P;njang
chasis ditentukan
oleh
panjang
bak
penampung
densanmemperhitungkan
fakto.
pergerakant.akto.. jarak antar.
bak penampung dengantraktor (pin untuk
gerakan memutar)minimal
harus0.5
x
lebar .hasis sehinggat.aktor
mampu me{akukan serakan betbelok90o
Panjans chasis sampai titik gandeng ditentukan dengan rumusan sebae:i berikut :P*"
=
P*
+(0.5
xt.,) --
tstKeterangan I
x=jarakantara
titik sambuns pergerakan memutar samp:idencantitik
gandeng dengan
tr:ktor'
2.
Pendekatan beban yans dipindahkan ketraktor
Beban ydng
dp,noahlan
te
trdltor lid:l'hanva
dipFrhunglan
o"lalr
keadaan statis namun
jlga
dal:m keadaan dinamis Beban yane dipindahkan ketraktor akan
berpengaruhterhadap
letak
titik
berat traktor dan
troiler, sekaligus berpensar!h terhadap besar beban yans dipindahkan!ntuk
maslns masing rodatraktor.
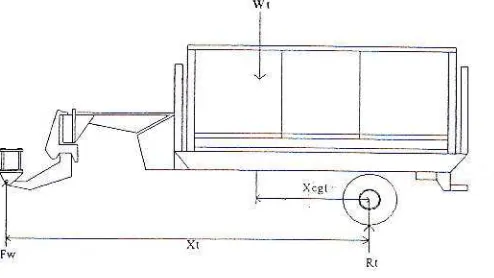
Pensaruh pembebanan terhadap frol/€r dapat dij€laskanGambar 1-
Iratlerdafl
saya-gaya karena pembebanan Dimana:Fw
=
beban yancdipindahkanke
trattor(kC)
Xf
=
la.akantara poros roda trallerdengan titikgandene (cmlX.rt
=
jara ktitik
berat horisonta I troller da ri poros rodatruler
{cm)l.lrt
=
berat totaltroler
(kclRl
=
gaya tahanantan:h
pada roda tral/er(ks)Persamaan letak
titik
berat rrdilerdarigambar tersebut adatah IIlt=Wt Fy/
...(4)v-
$r\Xt
....(s)w
sedanskan besar
qrolrrd
p.€JJu.e pada masins masing roda rroiler dapar ditentukan dengan rumusan sebagaiberikut:
Cpt
=
nx At
Rl
Diman.:
Gpt =
ground pressurepadarcdattuilerlksl
crT,')lr
=
jumlah RodaAt
=
lu?s bidang konEkroda tralle,.dengan tanah (cm':)Sedangkan titik pusat massa pada koordina! sumbu y dapat dicari dengan menggunakan moment pertama gabungan antara pusar massa chasis dan beban
traler.
Asumsi yang digunakan adalah dimensi chasisdiangg.p berbentuk segi empat
dan
dimensi
rrdile,.juga
dianggap berb€ntuk segi empat d€ngan ma5sa yang dianggap tersebar mer:ta pada seluruh lu:san.cambardi
bawah menjelaskan lebth l:njutasumsi di aras :(yb
'.w/)
+(yc
xVo)
... (7)W
+Wo
Dimana :
y
=titikb€rat
trollerdalam sumbu y (cm)yb
=titik
berat kontainer (cm) yc:tatik
berat chasis lcm)trv
:
bemt beban anckuttebu(k)
Wo =hetattrailer
(kgltetak
tjtik
berat akan
berpensaruh
terhadap
kestabitan pengendaliantraktor
dimana
efek
pengangkatanroda
depan
yang diakibatkan pembebanantraler
dapat direduksi. Secara lebih jelasnya hal tersebut akandihadkkan
contohkaslr
penyelesaian desain troiler dipl
Swe€t
lndo
lampung dengan
pembebanan10870
kg
tebu
dengai m€nggunakantraktorj€nk
Fiat New Holiand.lika
letak drowbordi
belakang porosroda
betakangrrakor,
maka akan terjadipenambahan gaya tahanan tanah pada roda betakang traktor dan pengurangan gaya tahanan tanah pada roda depan traktor. Sehingga didapatkan hasil perhltunCansebasaib€rikut:
fi/o' = - 116.s1 kC
Rto'=
3620.52 keSehingga gaya
tah:nan
taoah staris aktual pada rodatraktor
setetah pembeba na nfroler
da p at dinyatal(a n se bagai berikut :=880+
(- 116.s1) = 763.49 kanro,k,"?=Rro+Rro'
= 5140 + 3520.s2
=8660.52 kg
Rlockuor =g.y3 tahanan statis aktualpada roda depan traktor (ke)
Aro.rid=gaya
tahanan statis aktualpada roda betakangtraktor (kg) jika letaktitiks"ndens
berada diantara roda belakang dan roda depan dan belakang traktor maka akan didapatkan nilai gaya tahanan statis yang Dengan menggunakan perhitLngan prinsip keseimbangan gaya secara matematisseperti diatas mak:
didapatkan rumusan sebagal berikut :FtL
(r,
x,
)
H,ro,*"r=
Hro-
L'
...18) x2r],,,.
Sehingga gaya tahanan tanah
statis aktual
padaroda
depandan
roda belakangtraktordap:t
ditentukan sebagai berikut IRr'i,"
= 3519 311t
fl"k-/
= 1000 68 kcEfek penambahafl
beban eaya
kepadaroda depan inilah
yanB akan membuat pengendalianiraktor
menjadi tebih stabil. Efek pengangkatan roda depan diminimalisir dengan penamb:han beban gaya ke roda depan, sedanglanefek
pembebananyang berlebihan
kepadaroda
belakang dapat dikuranCi..Dari hasil pemrograman dapat diperoteh hasil tetak
titik
b€rat horisontat trailer adalahU
4.a cm dengantitik
berat verrikal 1S3.74 €m.3.
Pendekalan grcundpresurc
yang diiiinkanPendekatan
g.ound
pressute akan menentukantipe
roda
t
oiler
yang dig!nakan sehingga efek pemadatantanah dapat dihinda.i.
pendekatan ini juga menentukan jenis roda trolle/ yang digunakan apakah berb€n!uk tandem, atau single dengan poros ganda.Nitai
grornd presure untuk roda d.D.t
dirumusk:n sebagai berikut I
...(r0)
cx
Ar
Dirorfa
IG
p.
G ro u n d p rc ssu.e (ks/cn'1 Ia
= Gaya tah:nantan.h !ntuk
setiap roda {kg)Ar
= Luas tapakrod:
yans menyentuh tanah (cm,)c
=
konstanta sebesaro.T8 (Liljedahl,1989)Letak titik berar horisontat rrdiler yang berada tepat dit€ngah,tengah jarak
:otara
poros
rcda
trcilet
den3antitik
gandeng
:kan
memberikan efekdktribusi
bebangaya
yang lebih merata untLk roda frail€/ dan
traktor. Distribusi yang baik menjaditanground
pr€ssure yanstebih
baik bagi .oda troilet dar'tt.kbt
Pendekatan
ground
pressure
)\rea
mempengaruhi
berapa be$r
pemindahan berat
y:nCdiijink.n
ketrrktor.
cerak dinamis yang ditakukan otehtr:ktor
atan
mengakibar&:n distribusi pemindahanber:t
yang spesifik unruk rooa depan ataJpLn betrtangkakror.
Batasber:r
yanebotel
d,piroaila.
k.
LRr."*=P1"^.,,-Pt"'
.(11)4f.*-ry'
(12)pemindahan berat maks ke roda belakang
tr:ktor
(kg)beban maksimum vane mampu ditabao oleh roda belakane (ke) Dimana :
Adapvn hesat grcund
prer5lre
rodatrrilerdalam
contoh kasus di atasadalah
2.8 Kg,/cm'?. Hal ini berarti masih di atas batas nilai maksimum ground pressure untuk lahan tebu keringyaitu 1.84 kglcm'?(Muleenar, 1990).4.
Pendekabn letak rodatrotlet
letak
roda trdiler
berpensa.uh terhadapkestabil.n
pensend.liantrakto.
dan t/o,/er, iika ground
pressute sebagaif:ktor
p€mbatas sud:hditetapkan. Kestabilan yans dimaksudkan adalah
letaktitik
berat vertikal. Letaktitik
berat vertikaltrriler:kan
mempengaruhi moment kestabiland:n
sudutkritis
kemkingan traktor dan rroiler yang diijinkan. Moment kestabilan traktor dan trdiler ma ksmimal da pat dirumuskan sebagaiberikut:M
=W
xGxf
...-.
.-- -
...(13)Dimana:
M
-
momentmaksimum traktor dan irdler(kC.cm)W
=be?t tniler
(kC)y
=titik
be.at vertikal trol-/er {cm) er = tetapan gravitasi (m/dt'zlMoment m:ksimum
tlaktor
merupakan batasnilai
agartraktor
dan.roiler
tidak terguling ataupun terangkat pada roda bagian belakang traktor. Cara menshindarinil€i
moment yane berlebihas adalah densan membatasi letaktitik
berat traktor dan tratlersehing8a nilai sudut kritis traktor dan trdiler tidak melewa!i n;lai sudur kemirinCJn lahar.Sesarnya
nilai sudut kritis traktor dan
traler
dapat
dirumuskan sebasai b€rikut (Herodian, 1986) :beban gaya aldualpada roda belakane traktor (kg) pemindahan b€rat maksimum ke roda depan traktor (kg)
beban maksimum yang mampu ditahan oleh roda depan
(k)
Dimana :
adds = Sudut kritis
traktordan trdler
Y
= Lerak titik berat vertikal (cm)/
= lebar bodyrrot/er(cm)secara umum letak
titik ber:r
.emakin rendah akan semakin bagus karena sudut kritisakan s€makin besar sehingga traktor akan lebihsiabi,da;m
pengendaliannya.
Dari contoh kasus
di
atas maka didapatkan nitai moment maksimum s€besar 2 261 541.2 kg.cm. Moment ini merupakan nilai kritis yang membatasi manuver rraktor. Sedangkan njlai sudut kritis adatah sebes:r 45.26.. Angka ini merupakan nilaik.itjs
batas kemlringan sudut lahan yang oleh dilewati olehtraktor.
lika
lahanyang dilewati
mempunyai k€miringanyang lebih
maka t.a ktor dapat terguling.5.
Pemilihanjenktraktor
1.
Daya mlnlmalyang harusdimitikitraktor
untuk bebantarlkterrentu
Tenaga yang dihasitkan dari datam mesin
traktor
adatahtHp t/rre.ndl
Ho6e
Powet), sedangtanreragd
letua.a.rya
adrtah
BHD (Breo;k Ho.<ePoEetl yanl sud.l. berlurang karenr Lerj"dinv: eisiFn(i d,
data-
mesinTenag:
linear
dapat
dirumuskan
sebag.i
perbandingan
.ntarapertalian gaya
da.
jarak densan waktu, sehingg. dapat dkumuskan sebasaiberiklt:
F
r,l
Dimaoa :
P= Ienaca tinear
lHpl
F = saya (N)
J=
kecepatan (kmram)c
=
konstanta seb€sar 3.6 (Hunt, 2977)Tenasa
y:ns
dikelua*an oteh vakror dalam menarik
beban jugadipengaruhi
oleh
sebarapa besar traksi yangdihasitk:n
otehtraktqr
dJnh.:?:
ro
ins
resistoncetraiter.
Baing
resistance{tahanan
getinding),didefinisikan sebagai besarnya beban gaya yang dipertukan agar roda
trak;r
dapat
menggelinding. Padatraktor
yang menarik
trditer
makara
ingnR
=
C-
x [r/-,t...(1s)Dimana i
RR
=tahanan gelindinc/ rolling resistance INJW.
= gaya tahanan tanah pada setiap roda pada sumbu horisontal (N)C.
=
koefisien gelindinC pada rodaSedangkan besar traksi dap3t dirumusk.n sebasai berikut (Latledaht, 1989)r\
Tr
=C,xlf,
...(10) Dimana :Ir
=
traksi(N)Cr -
koefasien traksipada tanahWn
=
Caya tahanan tanah pada setiap roda dengan arah tegak luftrs densan permukaan (N)Gaya minimal yang
dibutuhkan traktor
beroda 4 yang menariktrolef
dapat dihitung dengan menggunakan persamaan sebagai berikut :
FdB =
M,.,,,",
+p,g,,",,.,
...(17)R9,-,p,
=
gaya berat trdllerdan beban (N)RR,-*,
=
rallins resistance pada toda trailerdan beban (N)Flla
=
say. tadk drowbar (N)Dalam sistem gandeng weiqht tra nsfer
tftksi
diperhitu ngkand:ribesar
gaya
akt!:l
setelah pembebanan Besartraksi
akan sangat berpengaftrhi€rhadap
pergerakantraktor
danfroler.
Traktortidak
akan bisa bergerak jika traksi lebih kecilda.ipada beban gayad.n
tenasa traktor lebih kecitdaritotal tenrga
yang dipedukan.. S€hinggas€cara
matematis$rat
sebuahtr.ktor dap:t
berger3k d.par dinyarakan seb:gaiberikut:
8qP,
PDalanr contoh kasls ini diperoteh hasit tenaga y.ng dibutuhkan sebesar 125.58 HP untuk kemiringan l-han 1s".
2.
Beban gaya pada rodatrakror
Pengaruh pembebanan
rrdller
terhadaptlaktor
dapat
direrangkan dalam gambar 2 sebag.i berikut :Dimana:
FdB = caya tatik druwbat
l(Cj
Zr
-
larak
antara perpanjangan garis proyeksi FdB dengantitik
tumpu roda belakangt aktor {cm)n.o'.
Gaya tahanan aktualroda belakang traktor (cm) Rlo '= caya bhanan aktual roda depan t.akror (cm)W
=
Berattraktor{&)
X.e
= ja.aktitik
berat traktor dengan porosrod:
belakangtraltor
(cm)Fw
-
Berat beban troll€ryans dipindahkan ke traktor (Kc)Xl
=
larak antara poros roda trakto. dengar titik gandeng lcm)X
= .Jarak:ntara
porosrod:
depan danrod:
betakansrr:ktor
(cm)A
Se5rlt.ngaydg"yo yan8bF!priaprddtnrt
gdndergLetak
titik
berat dapat dica.i dalam k€adaan statk. Adapun gaya tahanan tanah yansa&
p:da t.aktor
adatah gaya tahanan tanah aktual. Gaya tahanan aktual diarrikan seb:sai Baya tahanan rodatraktor
pad:saat
pembebanan,
yane
dipeng:ruhi
oleh
besarnya
berat
yanA dipindahkandari trailer ke
taktot
(Fw). Sec:ra matematis beban gaya aktualdapat dirumuskan sebasai berikut IR,o'=
R,o
+U]\! f!
.
..rer
X
Rfo'=
Rta+'
"
'
n'
... ...(i9)x
Dimana I
Rro =Gaya tahanan tanah staris roda betakangtrakror (Kg) 8lo = caya tah.nan tanah staris roda depan rraktor {Ks)
Pencarian letak
titik
be.at traktor
dapat
dicari
dengan menggunakan persamaansebagai berikut :\.
-
\
-(R'!:!-
:L-:!!--!j)
.{2olei
Dimana i
X.q = letak titift berat horisontal t.aktor dari poros roda belakang
traktor
(cm)
Perpjndahan berat terhadap roda depan
ataupun
roda belakangdiartikan
sebagai selisihantara Gaya tahanan dinamis dengan
gay" tahanan statis pada .oda depan dan roda bel.kanetraktor.
Gaya tahanan dinamis dipengaruhi olehfaktor
FdB pada saattraktor
bergerak denga$ m€nadk beban. Jik?trakto.
menarik truiler dan diasumslkanarah
gayaFdB searah
denganbidang horisontal lintasan trakto.
(Zr =Zt
maka gaya tahanan dinamis pada roda belakangtraktor
dapat diperoleh dari persamaan sebagai berikut:W(X - X.s\ + Fwx
(X
\'1) + FdB\ Z,f121)
X
Dimana:
Rr.Gayatahanan
dinamis roda bel:kangl.aktor
(Ks)Sedanekan gaya tahanan
dinamis
.oda
depan
traktor
dapat dihitung dengan menssunakan persamaan seb:eai berikut :(Fr
'
xt)+(w
X""l-(FdB
Zr)o'-r.",
-i
--'
Rf= gay: tahanan dinamis roda depan traktor (kg)
Nil.i
perpindahan berat untuk roda depan dan belakang dapar dkumuskan sebagai berikut :lRr
=Rr-Rro
...{23)lRf
= RJ-
RJo ...\24)Dimana:
/Rr=
berat yang dipindahkan ke roda belakane traktor (ks)/nl
= berat yang dipindahkan ke roda depan traktor (kC)Hasil perhitungan
daricontoh
kasus diat.s
menunjukkan bahwa gaya tahanan dinamis traktor setetah p€mbebanan adalah sebagai berikut Rf = 99a.79 kCRr = 8s2L.Z1 kC
S€hingga nilaiperpindaha n betat
(weiqht
transt'er) yang diperoteh adalah sebagai berikut :zRf
=7Ia
79 keARr =
*aL21te
Penakaian wejght
transt'erhitch dapat
meminimalkan ef€k pengankatan roda depan tra&tor karena gaya tahanan tanah pada roda depantraktor
masih bernilai positif. Nilaipositif
dar! gayatah;nan
roda depan membuktikan bahwa sis.rem gandengwe4rhttdnsferterbukti
efektjf untuk mencegah efek pengangkat:n roda depan traktor.3.
Kestabllan pengendaliankakto.
Kestabilan pencendati.n
traktor
berhubunganerat
d€nsan distribusi beban gaya pada masinsm:sins
rodatraktor,
tetaktitik
berat vertikal troiler dan sudut k.itis maksimatlJaktat dan traiter..
Pada proses transportlsi dengan menggunakanfroler
berporos tunggatakan
mensakibatkanefek
penganskatanroda depan traktor.
penssu;n
standar drosvbar memberikan ef€k p€nganskatan roda yansbertebih;
Let:kstardat drowbat
yan9berad: di
betakang poros roda belak:nstraktoi
akan memberikanefek
pembebanan berlebihanpad.
roda belakaig tratdo.
dan
€fek
pensuransan beban gayayans
bertebihanpada roda
d;pan
traktor. renomena yang terjadiadatsh adanya efek pengangkatan roda depantr:ktor
sehing8a
rraktor
tidak stabil dalam pengendatiannya, susah bermanuver dan mudah tergulinc.Efek pengangkata. roda
dep!f
mampu diminimalkan dengan sktemeandenl
wpightttontet.
telat
lirjr
sa-rbrnB v"ng berao:didep:n
po,osrodr
belakargtralror
al.n
membentaa b-ba1say" atruat
rooddep:n yar8
tebihbesar
dan
beban
gaya akruat roda betak.ns
yans
tebih kecit.
N:munpenemp;tan
titik
gandeng jugatidak boleh
sembaranean yanejushu
akan mengganggu jalannya pf o5es transpoft asi.KESIMPUIAN
Sistem
s.ndens densaf weighr rronsler terbukti tebih efektif
datammenjaga
k€stabilan
traktor
ctan
traiter.
Sistem gandeng
ini
mampumeminimalkan
efek
pengangkatan.oda
tlaktor
yans
dkebabkan
karenapembebanan trailer. Disisilain sistem inijuga berdampak positifterhadap traksi yang dihasilkan oleh
trakior.
pe.pindahanberat
dari trailer
ketraktor
akan mangakibatkan penambahan beb3n pada roda belakangtraktor
yang berarti manambah daya traksidati traktor.Simulasi dengan menggunakan
traktor Ford New
Holland yang dkaogkai densan trailer angkut yang digunakan PT. GPM diperoleh hasil perhitungan sebagai berikut I1.
Perpindahan beban gaYa dalam keadaan statis sebesar 3379.31 kg untuk roda belakangt.aktordan
120.68 kg ontuk roda depan traktor2.
Perpindahan beban gaya d?lam keadaan dinamls sebesar 3381.21 kg untuk roda belakangttaktordan
118.79 kg unrukroda depan traktor'3.
Letaktitik
berattrailer
pada
sumbu horisontal adalah 174.8 cm dari poros roda belakangtraktor.
Sedangkan letaktitik
berat vertikal adalah 153.74 cm dari permukaan tanah d€ngan sudut kritis kemiringan lahan sebesar45.26'.4.
G.ound pressure yang dihasilkan setelah pembebanan pada trailer adalah 2.8 kg/cm? danZ.l4
kglcm'z untuk .oda belakanstraktor
dan 0 34kglcm'
untlk
roda
deprn
ttaltor.
Halinr
ber"rli
m.rrh
berlFbihandari
batas pem:datan tanah vaneide.l sebe,rr
]
81 k8/(m'
JnrLl
laaaman tebupida
lahan k"ring (Muleenar,199o)Optim:si
letaktitik
berattrsktor
dantroilet
de.,Ear sistem vleiqht tronsferdengan bantuan
pemograman
kompuie.
$ngat
membantu
dalam menyederhanakan permasalahan desaio. Beberapa keungeul.n Yans didapatkan1.
Projes desain Yang relatifmudah dan cepat dilakukan2.
Koreksi dan validasi nilai nilai batas desain vang dapat dilakukan setiap saat3.
Modifikasi carz desain dapat dilakukan setiap saatSARAN
Penelitian
ini
masih
membutuhkanbanyak
penyempurnaanantara
laindengan
penambahank.iteria'kdteris
desainyang bisa
diberikantanpa
harur melakukan percobaan-percobaan, seperti perhitunEanrctins
resistance'ttak i dand rawb a r pull yana
tepat.
Program simulasi
ini
hendaknyadilak!kan oleh
administrator yang sirdah paham d€ngan permasalahandes:in traktor
dantrailer'
Penambahan visuali$siobjek
p€rancancanhendakny. iusa
ditambahkan sehinssa kesalahan P€rs€psi desain dapatdihindari
DAFTAR PUSTAKA
Alcack, R. L986.Iractor Ifiplements Systen. A\!iPubtishing. New
yo.k
Alam, AgusJ. 1999. M icrosoft Visual Ba sic 6.0.
tlex
tVedia Komputindo. lakarta Armansyah- 2002. Analisis Tahanan Gelinding(Rolrng
ResirtanceJ Roda Traksidengan Metode Uti Roda Tunsg.t pada Bak Tanah (Sot/Bm). Skripsi.
IPB.
Barger,
E.L., WM
Carletton, E.G. McKibben and Roy Bainer. LgSa. Troctors ond IheirPower Units. lohn \N illey &Sont
tnc. Newyo.k
Culpin, C. 1969. Fam Machinery. Crosby Lockwood & Sons, Ltd. tondon
Goering E. Carol.
19A9. Engineand froctor
Pawer. pWS
publisher_ Boston, MassachussetsHerodian, S:m. 1986. StudyTeknis penggunaan candengan
(tdilerl
di pabrik Gula Sunga [,4ayang Lampung L.ltara. Skripsi. tpBHunt,
D.
1977.
fdrm
Pow{
ond Mdchinery
Monaqement.
The lowa
State University Press. USAKuncoro, A- 2002. Aspek Alat dan Mesio
Panen
Tebudi
pT. GMp Lampunc. pL.Fateta.lPB
Kusumo,
Aryo
5.
2000.
Euku LatihanMicrosoft Visual
Basic6.0.
Etex Media Komputindo. I a ka rtaLiljedahl, J.8., Pair{ K.T., Makoto Hoko and David Smith.
I98s.
rroctorand
tts powerUnitr. AviBook Pub. New York.
Mcl€an,
WG.,
LW
Nelsofl and
l"H
B:ssim.
t9a7.
Theory
an
prabtens
ot'Engineering Mechoni.s. McGraw-Hill Book Co. Singapore
Mul€enar, R. 1990. Studi Pemadatao Tanah Akibat Lintasan Mesin Budidaya Tebu pada Lahan Kering. T€sis. IPB
Nurrohman,
s
2002. Anafisis Teknh Pengunaan Weightttonsfer
padaTraitet Dipr.
Sweet Indo lampune. Stripsi. IPBOida, A. a992. Ierromechonlcr. D€partement of Aedcultu ral Engi ne€ring Facutty
of
Agricultural, Kyoto U niversity, la pa n
Srivastava,
K, Carrol
E.
Goering, Roger
P.R.1993.Engineering
principtes oJ AgriculturalMachine. ASAE To(r Book Number:6. A5AE.Taha,
A.H.
1993. Operotions Researh. Depanementof
tndust.ial
Engine€rins_ University of Arkansas, Fayetteville.Thiteringlhon and J.G Rimmer.1969. Applied
Mechonis. Mccraw
HillBook Co. Ltd. London